



-
摘要:
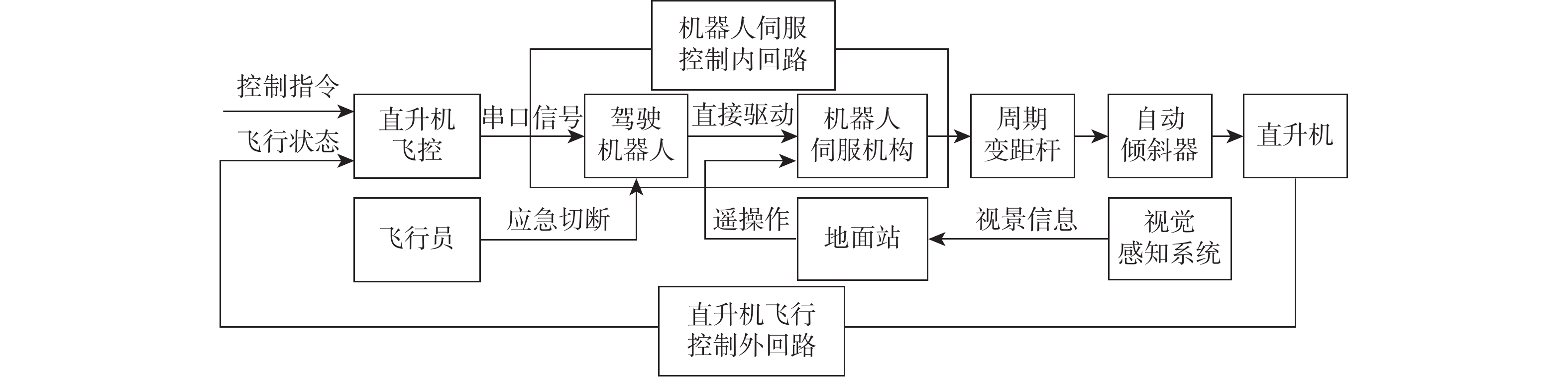
人机协同系统可以充分发挥人类智慧的优越性和机器人作业的高精度与高效率,被广泛应用于决策指挥、工业控制和医疗手术等领域。飞行员驾驶飞行器时需要实时处理大量信息并给出精准操控,操纵负担大。基于典型单旋翼直升机的操控特点,设计一种直升机协同驾驶机器人系统,驾驶机器人连接直升机周期变距杆控制直升机的俯仰运动和滚转运动,飞行员通过总距杆和脚蹬控制直升机的航向运动和升降运动。协同驾驶机器人可以在不改装原有直升机的基础上实现一种新型的人机协同飞行控制,快速提升现有直升机的自动化水平和飞行员在应急情况下的生存能力。研究驾驶机器人控制系统模型,建立适用于直升机人机协同控制的飞行模拟平台,通过飞行员在环飞行仿真初步验证了人机协同控制方法的可行性。在飞行仿真验证的基础上研制了驾驶机器人样机,并将样机搭载在SVH-4直升机上完成飞行实验验证。
Abstract:The man-machine cooperation system can make full use of the advantages of human intelligence and the high precision and efficiency of robot operation. The substantial control burden placed on pilots results from their requirement to analyze a huge quantity of information in real time and provide precise control while operating the aircraft. A cooperative robot pilot was proposed based on a typical helicopter flight platform. The robot pilot connects the cyclic control stick to control the pitch motion and roll motion of the helicopter while the human pilot manipulates the pedals and collective to control the yaw motion and helicopter height. The cooperative robot pilot, which may swiftly raise the automation level of the current helicopter and increase the pilot’s viability in an emergency, introduces a novel approach to man-machine cooperative flight control without altering the original aircraft. The control system of the cooperative robot pilot was studied and the flight simulator for man-machine cooperative piloting was established. The feasibility of the cooperative piloting method was preliminarily verified through the pilot-in-loop flight simulations. Based on the flight simulation verification, a prototype of the cooperative robot pilot was developed and installed in the SVH-4 helicopter to complete the flight experiment verification.
-
Key words:
- cooperative piloting /
- helicopter /
- robot pilot /
- flight control /
- flight experiment
-
[1] LENAT D B, FEIGENBAUM E A. On the thresholds of knowledge[C]//Proceedings of the International Workshop on Artificial Intelligence for Industrial Applications. Piscataway: IEEE Press, 2002: 291-300. [2] 杨灿军, 陈鹰, 路甬祥. 人机一体化智能系统理论及应用研究探索[J]. 机械工程学报, 2000, 36(6): 42-47. doi: 10.3901/JME.2000.06.042YANG C J, CHEN Y, LU Y X. Study on the humachine intelligent system and its application[J]. Chinese Journal of Mechanical Engineering, 2000, 36(6): 42-47(in Chinese). doi: 10.3901/JME.2000.06.042 [3] 吴文海, 张源原, 周思羽, 等. 飞行员助手项目综述[J]. 航空学报, 2016, 37(12): 3563-3577.WU W H, ZHANG Y Y, ZHOU S Y, et al. Overview of pilot’s associate program[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(12): 3563-3577(in Chinese). [4] 程建锋, 董新民, 薛建平, 等. 飞机-驾驶员闭环系统模糊预见控制器设计[J]. 航空学报, 2014, 35(3): 807-820.CHENG J F, DONG X M, XUE J P, et al. Fuzzy preview controller design for aircraft-pilot closed loop system[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 807-820(in Chinese). [5] 王洪. 飞机监视应用系统、航迹融合与ADS-B In应用[J]. 电讯技术, 2019, 59(12): 1488-1494.WANG H. Aircraft surveillance applications systems, track fusion and ADS-B in applications[J]. Telecommunication Engineering, 2019, 59(12): 1488-1494(in Chinese). [6] RONG J E, SPAETH T, VALASEK J. Small aircraft pilot assistant: Onboard decision support system for SATS aircraft[C]//Proceedings of the AIAA 5th ATIO and16th Lighter-Than-Air System Technology and Balloon Systems Conferences. Reston: AIAA, 2005. [7] KREITMAIR-STECK W, HAISCH S, HESS S, et al. Eurocopter research on pilot assistance for rotorcraft[C]//Proceedings of SPIE - The International Society for Optical Engineering. Orlando: Defense AdvancedResearch Projects Agency, 2009: 78-87. [8] SANTANA G A, DE OLIVEIRA P H I A, CIMINI C A, et al. Assessment of a general aviation pilot assisting system influence on the piloting performance and safety of inexperienced pilots[J]. Advanced Materials Research, 2014, 1016: 655-660. doi: 10.4028/www.scientific.net/AMR.1016.655 [9] PIENIAZEK J. Control and monitoring assistant for pilot[J]. Aircraft Engineering and Aerospace Technology, 2019, 91(5): 783-789. doi: 10.1108/AEAT-01-2018-0012 [10] 赵淑利, 李鑫. 自动飞行与电传操纵一体化设计分析[J]. 系统仿真学报, 2008, 20(2): 213-215.ZHAO S L, LI X. The integrated design of automatic flight and fly-by-wire control[J]. Journal of System Simulation, 2008, 20(2): 213-215(in Chinese). [11] 陈奎兆, 王江云. 飞行仿真器自动飞行系统研究[J]. 系统仿真学报, 2006, 18(S2) : 706-709.CHEN K Z, WANG J Y. Research of automatic flight system in flight simulator[J]. Journal of System Simulation, 2006, 18(S2) : 706-709 (in Chinese). [12] 张新国. 从自动飞行到自主飞行——飞行控制与导航技术发展的转折和面临的挑战[J]. 飞机设计, 2003(03): 55-59.ZHANG X G. From automatic flight to autonomous flight[J]. Aircraft Design, 2003(03): 55-59(in Chinese). [13] 吴文海, 张源原, 刘锦涛, 等. 新一代智能座舱总体结构设计[J]. 航空学报, 2016, 37(1): 290-299.WU W H, ZHANG Y Y, LIU J T, et al. Overall architecture design of new generation intelligent cockpit[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 290-299(in Chinese). [14] 冯悦, 王言伟, 耿欢. 战斗机智能座舱人机交互方式发展及应用[J]. 飞机设计, 2020, 40(4): 54-58.FENG Y, WANG Y W, GENG H. Development and application of human-computer interaction mode of fighter smart cockpit[J]. Aircraft Design, 2020, 40(4): 54-58(in Chinese). [15] JIN Z B, LI D C, WANG Z Y. Research on the operating mechanicals of the helicopter robot pilot[J]. IOP Conference Series:Materials Science and Engineering, 2020, 887(1): 012022. doi: 10.1088/1757-899X/887/1/012022 [16] ASHLEY T. DARPA, army working on AI co-piloting software[J]. Inside the Pentagon, 2019, 35(20): 10. [17] SHIELDS P. Additive manufacturing of simulator parts[C]//Proceedings of the 73rd Annual AHS International Forum and Technology Display. Fairfax: American Helicopter Society International, 2017. [18] SONG H J, SHIN H, YOU H, et al. Toward autonomous aircraft piloting by a humanoid robot: Hardware and control algorithm design[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2016: 398-403. [19] JEONG H, KIM J, SHIM D H. Development of an optionally piloted vehicle using a humanoid robot[C]//Proceedings of the 52nd Aerospace Sciences Meeting. Reston: AIAA, 2014. [20] JEONG H, SHIM D H, CHO S. A Robot-Machine Interface for full-functionality automation using a humanoid[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2014: 4044-4049. [21] KUMAR V, YONG H, MIN D, et al. Auto landing control for small scale unmanned helicopter with flight gear and HILS[C]//5th International Conference on Computer Sciences and Convergence Information Technology. Piscataway: IEEE Press, 2011: 676-681. [22] 黄华, 徐幼平, 邓志武. 基于Flightgear模拟器的实时可视化飞行仿真系统[J]. 系统仿真学报, 2007, 19(19): 4421-4423. doi: 10.16182/j.cnki.joss.2007.19.020HUANG H, XU Y P, DENG Z W. Real-time visual flight simulation system based on flightgear simulator[J]. Journal of System Simulation, 2007, 19(19): 4421-4423(in Chinese). doi: 10.16182/j.cnki.joss.2007.19.020 [23] 杨一栋. 直升机飞行控制[M]. 第2版. 北京: 国防工业出版社, 2011: 108-109.YANG Y D. Helicopter flight control[M]. 2nd ed. Beijing: National Defense Industry Press, 2011: 108-109 (in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 654
- HTML全文浏览量: 46
- PDF下载量: 16
- 被引次数: 0
