



-
摘要:
针对由仅测角信息确定卫星轨道的问题,建模为求解相应适应度函数零点的一类方法,分析了求解该问题的高斯-牛顿迭代法中涉及的观测时间步长、动力学方程求解步长和迭代格式步长三者之间的区别与联系。针对一般精定轨方法由于适应度函数高度非线性而难以构造有效迭代格式的问题,提出了初定轨与精定轨方法结合的定轨方法,并在理论上分析了该方法的可行性。通过数值实验验证了所提求解方法的准确性、有效性和高效性。
Abstract:Regarding the problem of the angle-only orbit determination, we transformed into a method for solving the minimum value of the fitness function. The difference and relationship between the observation time step, the dynamic equation solution step and the iterative format step are analyzed. It is pointed out that the difficulty of precise orbit determination mainly lies in the high nonlinearity of the fitness function. A new method combining the initial and precise orbit determination is thus proposed, and its feasibility is analyzed theoretically. Finally, the accuracy, effectiveness and efficiency of the proposed method are verified by numerical experiments.
-
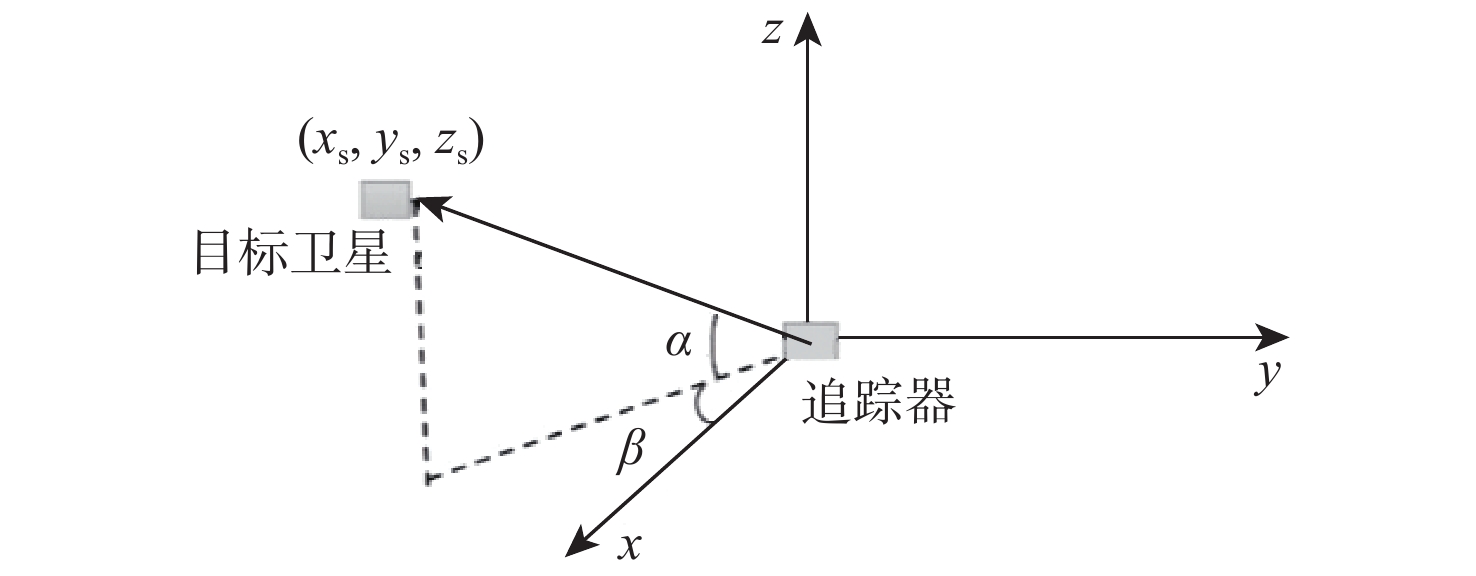
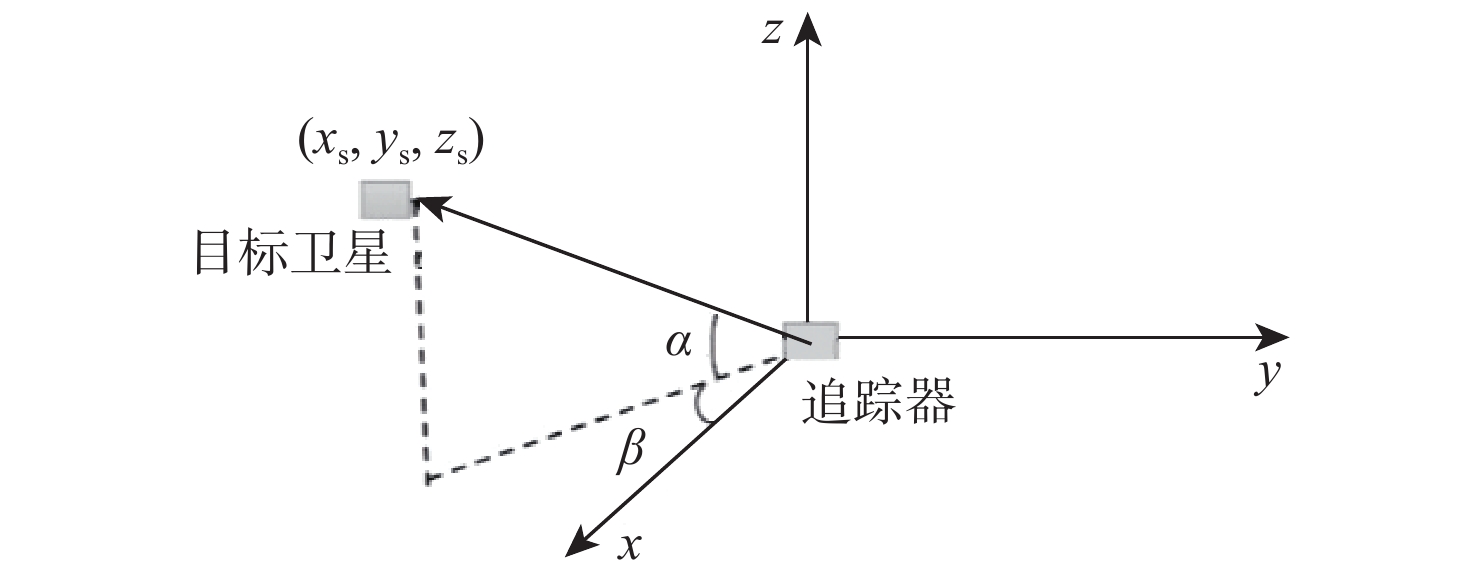
图 1 目标卫星相对追踪器的方位角和俯仰角
Figure 1. Azimuth and pitch angle of target satellite relative to tracker
表 1 目标卫星和追踪器的轨道参数
Table 1. Orbit parameters of target satellite and tracker
卫星 编号 轨道倾角/(°) 升交点赤经/(°) 轨道偏心率 近地点幅角/(°) 平近点角/(°) SURCAL 159 02872 69.9746 270.6109 0.0003468 77.8611 282.2885 LCS1 01361 32.1425 90.7924 0.0013346 352.4236 7.6059 OPS 5712 (P/L 153) 02874 69.9741 11.4340 0.0006722 179.7644 180.3466 CALSPHERE2 00902 90.1805 40.8021 0.0016428 285.0790 201.1070  下载: 导出CSV
下载: 导出CSV
表 2 目标卫星和追踪器的相关参数
Table 2. Parameters of target satellite and tracker
卫星编号 $ x/\mathrm{k}\mathrm{m} $ $ y/\mathrm{k}\mathrm{m} $ ${\textit{z}}/\mathrm{k}\mathrm{m}$ ${v}_{x}/(\mathrm{k}\mathrm{m}\cdot\mathrm{s}^{-1})$ ${v}_{y}/(\mathrm{k}\mathrm{m}\cdot\mathrm{s}^{-1})$ ${v}_{\textit{z} }/(\mathrm{k}\mathrm{m}\cdot\mathrm{s}^{-1})$ 02872 2205.6253 −3530.1116 5957.4332 1.2063 6.4775 3.3837 00902(状态1) −1723.527 −1515.599 7083.2704 −5.2923 −4.5114 −2.2498 01361 −7271.0769 −3216.8938 4561.0154 1.9264 −6.1784 −1.2681 00902(状态2) −5129.4502 −4404.0765 3123.4468 −2.3506 −1.9703 −6.6397 02874 2816.7150 2742.6071 6127.6991 −6.7255 −0.0043 3.0818 00902(状态3) 4528.3372 3844.9314 4483.8043 −3.3319 −2.8833 5.8413
下载: 导出CSV
表 3 3个目标卫星寻优初值的相关参数
Table 3. Parameters of initial values for optimizing of three target satellites
卫星编号 $ |\Delta x|/\mathrm{k}\mathrm{m} $ $ |\Delta y|/\mathrm{k}\mathrm{m} $ $|\Delta {\textit{z}}|/\mathrm{k}\mathrm{m}$ $|\Delta {v}_{x}|/(\mathrm{k}\mathrm{m}\cdot\mathrm{s}^{-1})$ $|\Delta {v}_{y}|/(\mathrm{k}\mathrm{m}\cdot\mathrm{s}^{-1})$ $|\Delta {v}_{ {\textit{z} } }|/(\mathrm{k}\mathrm{m}\cdot\mathrm{s}^{-1})$ 适应度函数值 02872 241.2338 123.6828 69.1218 3.1734 1.1976 0.7500 5.04×10−6 01361 557.4840 309.0339 374.2116 1.5170 0.3686 3.5185 6.61×10−6 02874 927.0271 597.0269 890.3455 2.1806 3.6721 4.8692 4.74×10−6
下载: 导出CSV
表 4 2种定轨方法的定轨结果
Table 4. Orbit determination results of two orbit determination methods
卫星编号 $ |\Delta x|/\mathrm{m} $ $ |\Delta y|/\mathrm{m} $ $|\Delta {\textit{z}}|/\mathrm{m}$ $|\Delta {v}_{x}|/(\mathrm{m}\cdot\mathrm{s}^{-1})$ $|\Delta {v}_{y}|/(\mathrm{m}\cdot\mathrm{s}^{-1})$ $|\Delta {v}_{\textit{z} }|/(\mathrm{m}\cdot\mathrm{s}^{-1})$ 适应度
函数值初-精
结合
定轨
方法纯精
定轨
方法初-精
结合
定轨
方法纯精
定轨
方法初-精
结合
定轨
方法纯精
定轨
方法初-精
结合
定轨
方法纯精
定轨
方法初-精
结合
定轨
方法纯精
定轨
方法初-精
结合
定轨
方法纯精
定轨
方法初-精
结合
定轨
方法纯精
定轨
方法02872 4.07 21.78 2.09 11.17 1.17 6.24 6.74×10−3 0.16 1.14×10−2 1.25 5.83×10−3 3.41 2.60×10−19 5.13×10−10 01361 3.09 6992.70 1.71 3876.31 2.08 4693.86 6.18×10−3 15.82 6.08×10−3 12.90 7.76×10−3 16.38 4.17×10−20 2.87×10−20 02874 5.41 1624.11 3.49 1045.90 5.20 1559.80 1.07×10−2 1.12 9.10×10−3 4.61 8.72×10−3 0.14 8.45×10−19 1.68×10−9
下载: 导出CSV
表 5 含噪声的定轨结果
Table 5. Orbit determination results with noise
卫星编号 $ |\Delta x|/\mathrm{m} $ $ |\Delta y|/\mathrm{m} $ $|\Delta {\textit{z}}|/\mathrm{m}$ $|\Delta {v}_{x}|/(\mathrm{m}\cdot\mathrm{s}^{-1})$ $|\Delta {v}_{y}|/(\mathrm{m}\cdot\mathrm{s}^{-1})$ $|\Delta {v}_{\textit{z} }|/(\mathrm{m}\cdot\mathrm{s}^{-1})$ 适应度函数值 02872 4.07 2.09 1.17 6.74×10−3 1.14×10−2 5.83×10−3 2.74×10−19 01361 3.10 1.72 2.08 6.18×10−3 6.08×10−3 7.76×10−3 4.26×10−20 02874 5.41 3.49 5.20 1.07×10−2 9.10×10−3 8.73×10−3 8.80×10−19
下载: 导出CSV
-
[1] BENNETT J C, SANG J, SMITH C, et al. An analysis of very short-arc orbit determination for low-Earth objects using sparse optical and laser tracking data[J]. Advances in Space Research, 2015, 55(2): 617-629. doi: 10.1016/j.asr.2014.10.020 [2] LI B, SANG J, CHEN J. Achievable orbit determination and prediction accuracy using short-arc space-based observations of space debris[J]. Advances in Space Research, 2018, 62(11): 3065-3077. doi: 10.1016/j.asr.2018.08.038 [3] GAIAS G, ARDAENS J S. Flight demonstration of autonomous noncooperative rendezvous in low Earth orbit[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(6): 1337-1354. doi: 10.2514/1.G003239 [4] GONG B, LI W, LI S, et al. Angles-only initial relative orbit determination algorithm for non-cooperative spacecraft proximity operations[J]. Astrodynamics, 2018, 2(3): 217-231. doi: 10.1007/s42064-018-0022-0 [5] MILANI A, GRONCHI G F, KNEZEVIC Z, et al. Orbit determination with very short arcs[J]. ICARUS, 2005, 179(2): 350-374. doi: 10.1016/j.icarus.2005.07.004 [6] VALLADO D A, CARTER S S. Accurate orbit determination from short-arc dense observational data[J]. Journal of the Astronautical Sciences, 1998, 46(2): 704-729. [7] 贾沛璋, 吴连大. 论初轨计算的最佳精度及二重解[J]. 天文学报, 1998, 39(4): 337-343. doi: 10.15940/j.cnki.0001-5245.1998.04.001JIA P Z, WU L D. The optimal accuracy and double solution of initial orbit calculation are discussed[J]. Acta Astronomica Sinica, 1998, 39(4): 337-343(in Chinese). doi: 10.15940/j.cnki.0001-5245.1998.04.001 [8] ANSALONE L, CURTI F. A genetic algorithm for Initial orbit determination from a too short arc optical observation[J]. Advances in Space Research, 2013, 52(3): 477-489. doi: 10.1016/j.asr.2013.04.004 [9] HINAGAWA H, YAMAOKA H, HANADA T. Orbit determination by genetic algorithm and application to GEO observation[J]. Advances in Space Research, 2014, 53(3): 532-542. doi: 10.1016/j.asr.2013.11.051 [10] LI X R, WANG X. Genetic algorithm for initial orbit determination with too short arc[J]. Acta Astronomica Sinica, 2016, 41(1): 76-91. [11] LI X R, WANG X. Genetic algorithm for initial orbit determination with too short arc (continued)[J]. Chinese Astronomy and Astrophysics, 2017, 41(2): 254-262. doi: 10.1016/j.chinastron.2017.04.007 [12] LI X R, WANG X, XIONG Y Q. A combination method using evolutionary algorithms in initial orbit determination for too short arc[J]. Advances in Space Research, 2019, 63(2): 999-1006. doi: 10.1016/j.asr.2018.08.036 [13] 王雪莹, 安玮, 李骏. 天基光学短弧观测约束域的粒子群优化定轨方法[J]. 国防科技大学学报, 2014, 36(6): 146-151. doi: 10.11887/j.cn.201406026WANG X Y, AN W, LI J. An orbit-determination method with particle swarm optimization using space-based optical short-arc observation in admissible region[J]. Journal of National University of Defense Technology, 2014, 36(6): 146-151(in Chinese). doi: 10.11887/j.cn.201406026 [14] 周海银, 潘晓刚, 李董辉. 基于天基空间目标监视系统的定轨技术研究[J]. 系统仿真学报, 2008, 20(13): 3538-3541. doi: 10.16182/j.cnki.joss.2008.13.065ZHOU H Y, PAN X G, LI D H. Research on orbit determination algorithm based on SBSS[J]. Journal of System Simulation, 2008, 20(13): 3538-3541(in Chinese). doi: 10.16182/j.cnki.joss.2008.13.065 [15] 杨志涛. 低地球轨道初轨确定误差分析[J]. 空间碎片研究, 2019, 19(2): 1-9.YANG Z T. Eroor analysis of initial orbit determination in low Earth orbit[J]. Space Debris Research, 2019, 19(2): 1-9(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 133
- HTML全文浏览量: 46
- PDF下载量: 25
- 被引次数: 0
