



-
摘要:
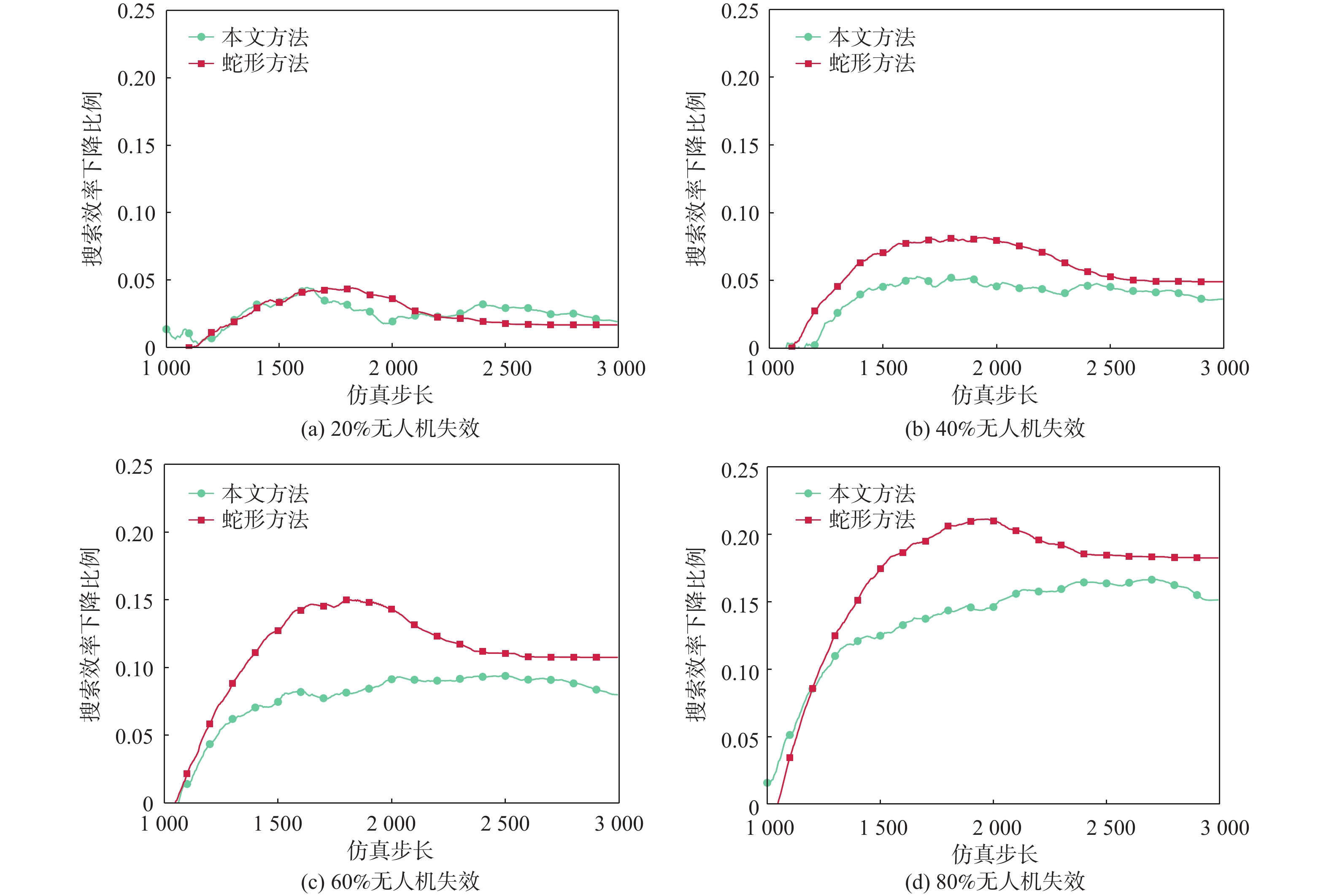
随着无人系统与智能技术的发展,作为无人系统的典型应用之一的无人机集群,在民用与军事领域的应用前景越来越广阔,当集群规模较大时,传统的组网通信方式会受到带宽、干扰等限制,极大影响无人机集群的协同作战效能。基于此,提出一种弱信息交互条件下的无人机集群决策模型(WIIUSM),不依赖无人机之间的双向数据交互,仅依靠单向视觉感知的方式实现期望的集群行为。建立了弱信息交互的无人机集群模型,采用改进后的遗传算法(IGA)作为优化方法对决策模型进行优化。以区域搜索任务为例进行仿真测试,将所提方法与基于顶层规划的蛇形方法进行对比,证明了所提方法在搜索效率层面的有效性;测试了不同比例无人机失效条件下搜索效率的下降程度,与蛇形方法进行对比,证明所提方法具有一定的鲁棒性。
Abstract:The development of unmanned systems and intelligent technology has presented a broad application prospect of UAV swarms, one of the typical applications of unmanned systems in both civilian and military fields. When the swarm size is large, however, the traditional networking communication method will be limited by bandwidth and interference, which greatly affects the cooperative combat effectiveness of UAV swarms. This paper proposes a weak information interaction UAV swarm model (WIIUSM), not relying on two-way data interaction between UAVs but achieving the desired swarm behavior by using only one-way visual perception. Firstly, this paper establishes a weak information-interaction UAV swarm model. Next, an improved genetic algorithm (IGA) is used as an optimization method for the decision model, and several simulation tests are conducted with the area search task. A comparison with the snake search method based on top-level planning reveals the effectiveness of search efficiency of the proposed method. The degradation of search effectiveness under the conditions of different proportions of UAV failure is also tested, showing the robustness of our methods compared with the snake method.
-
Key words:
- UAV swarm /
- weak information interaction /
- swarm decision /
- genetic algorithm /
- area search
-

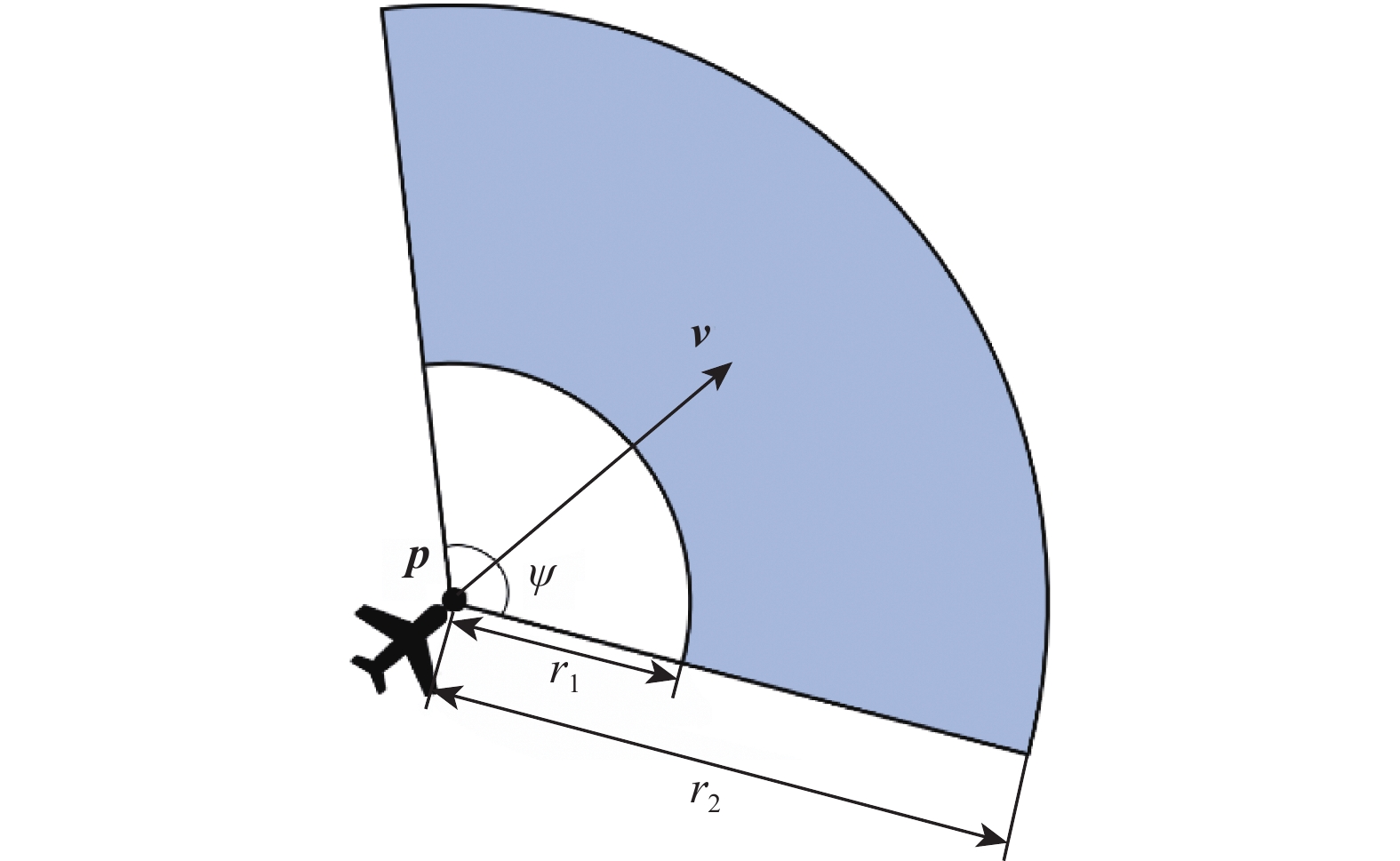
图 2 无人机二维空间感知范围示意图
Figure 2. Schematic of two-dimensional space perception range of UAV

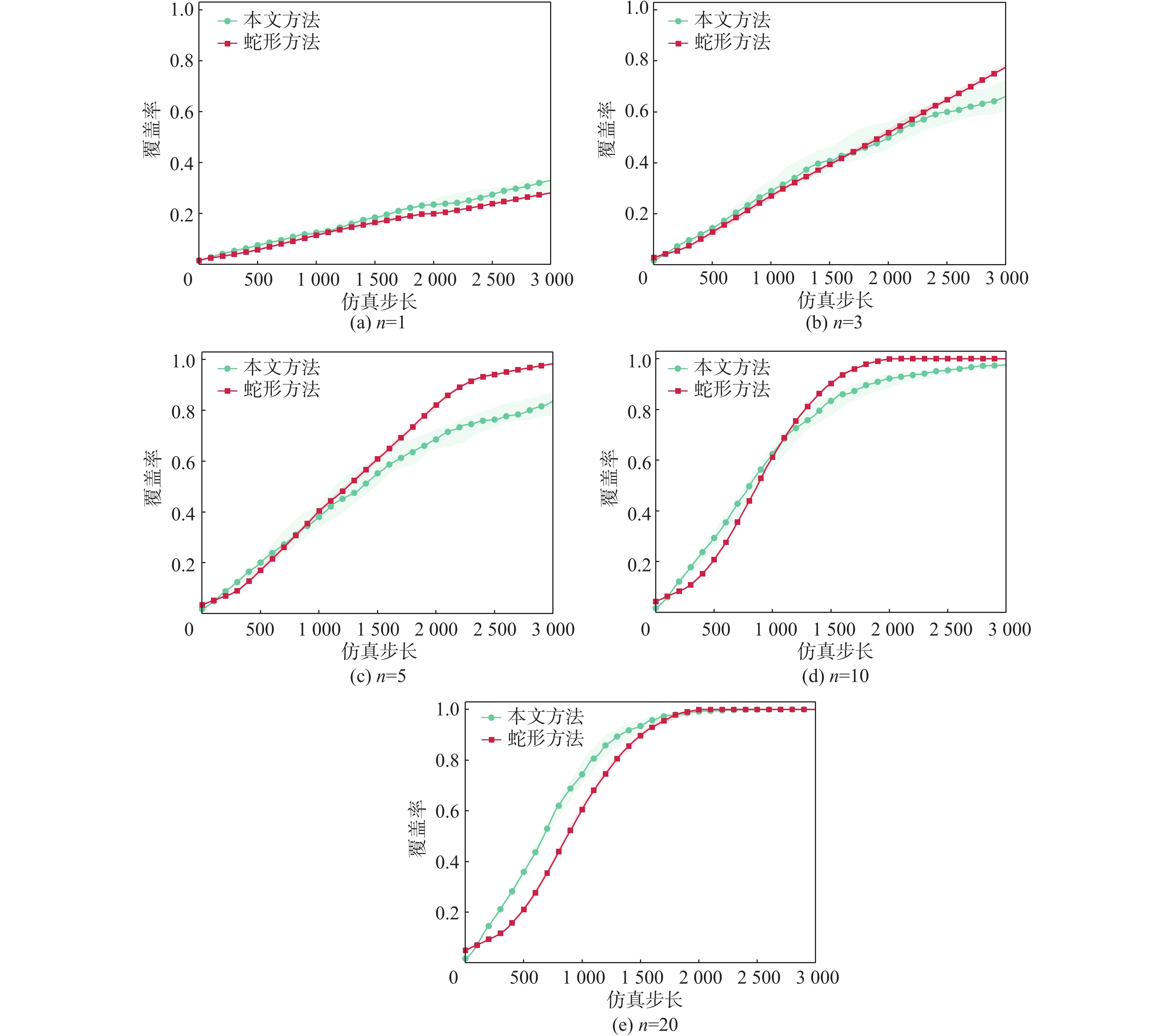
图 6 不同无人机数量下2种方法的搜索覆盖率变化
Figure 6. Change in search coverage of two methods with different numbers of UAVs

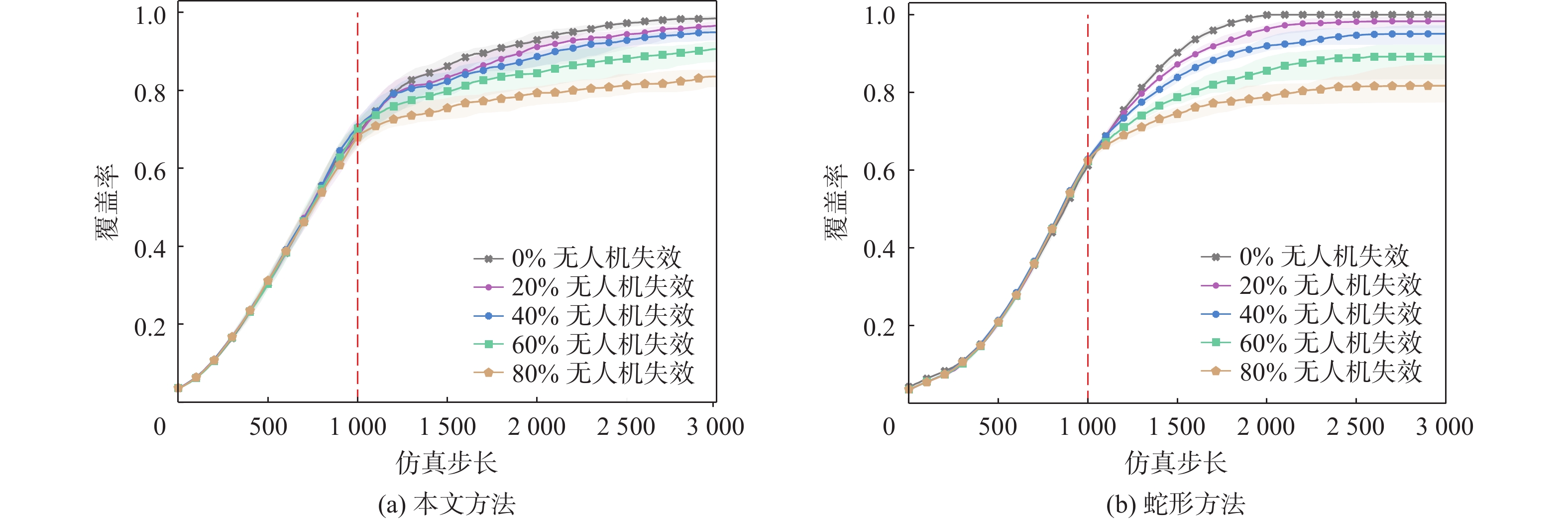
图 9 2种方法在不同比例无人机失效比例下的区域搜索覆盖率变化
Figure 9. Changes in search coverage for two methods with different failure ratios

图 10 2种方法在不同失效比例下的区域搜索效率下降情况对比
Figure 10. Comparison of search efficiency degradation of two methods with different failure ratios
表 1 搜索任务IGA优化参数设置
Table 1. IGA optimization parameter settings of search task
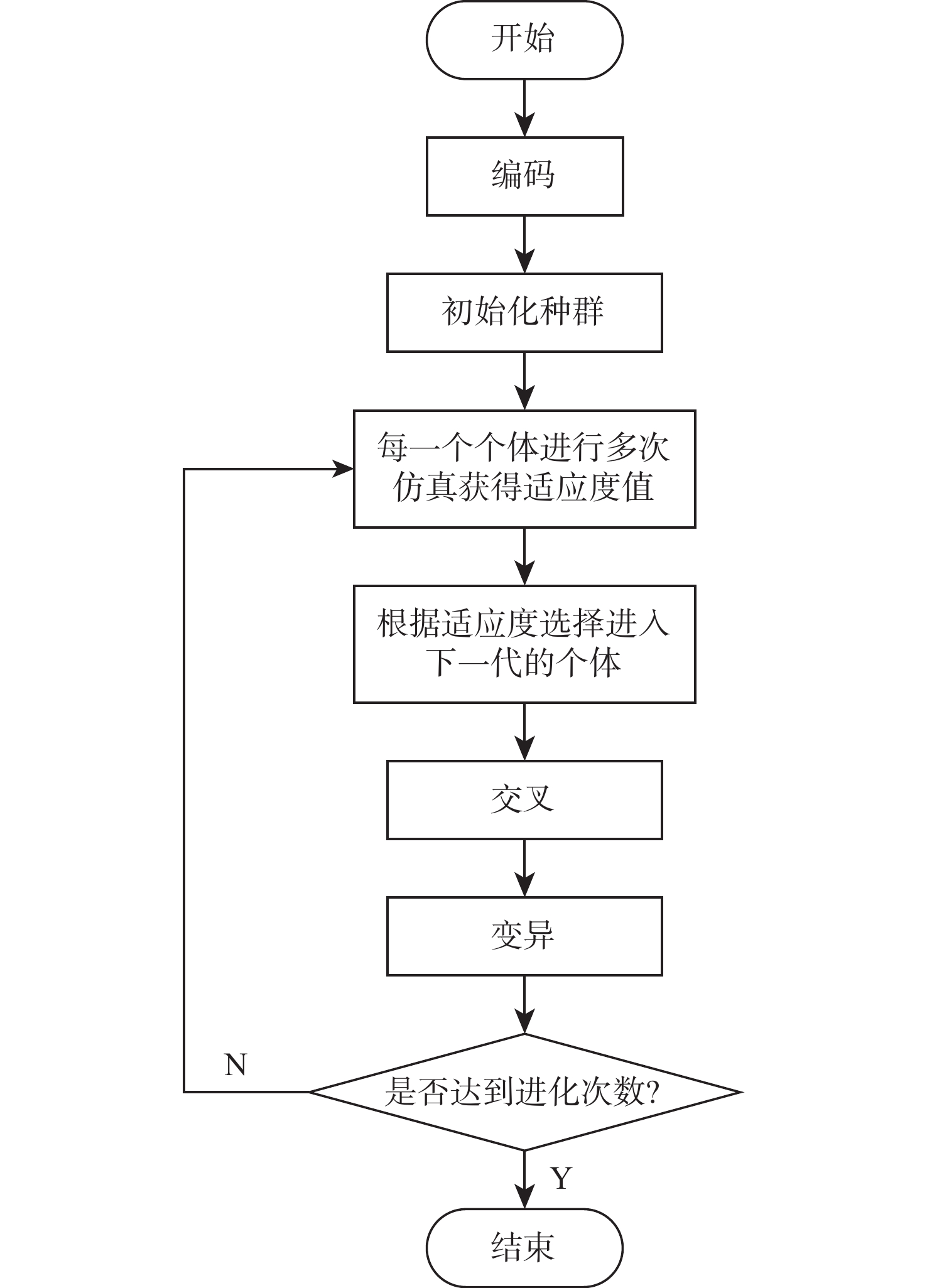
参数 数值 种群规模$p_{\rm{pop}}$ 10 迭代次数 20 最优保持比例 0.5 适应度计算次数$n_{\rm{num}}$ 5 行为原型数量 1 交叉概率 0.1 变异概率$m_{\rm{r}}$ 0.4,0.9 变异比率$ r $ 0.05,0.15,0.25  下载: 导出CSV
下载: 导出CSV
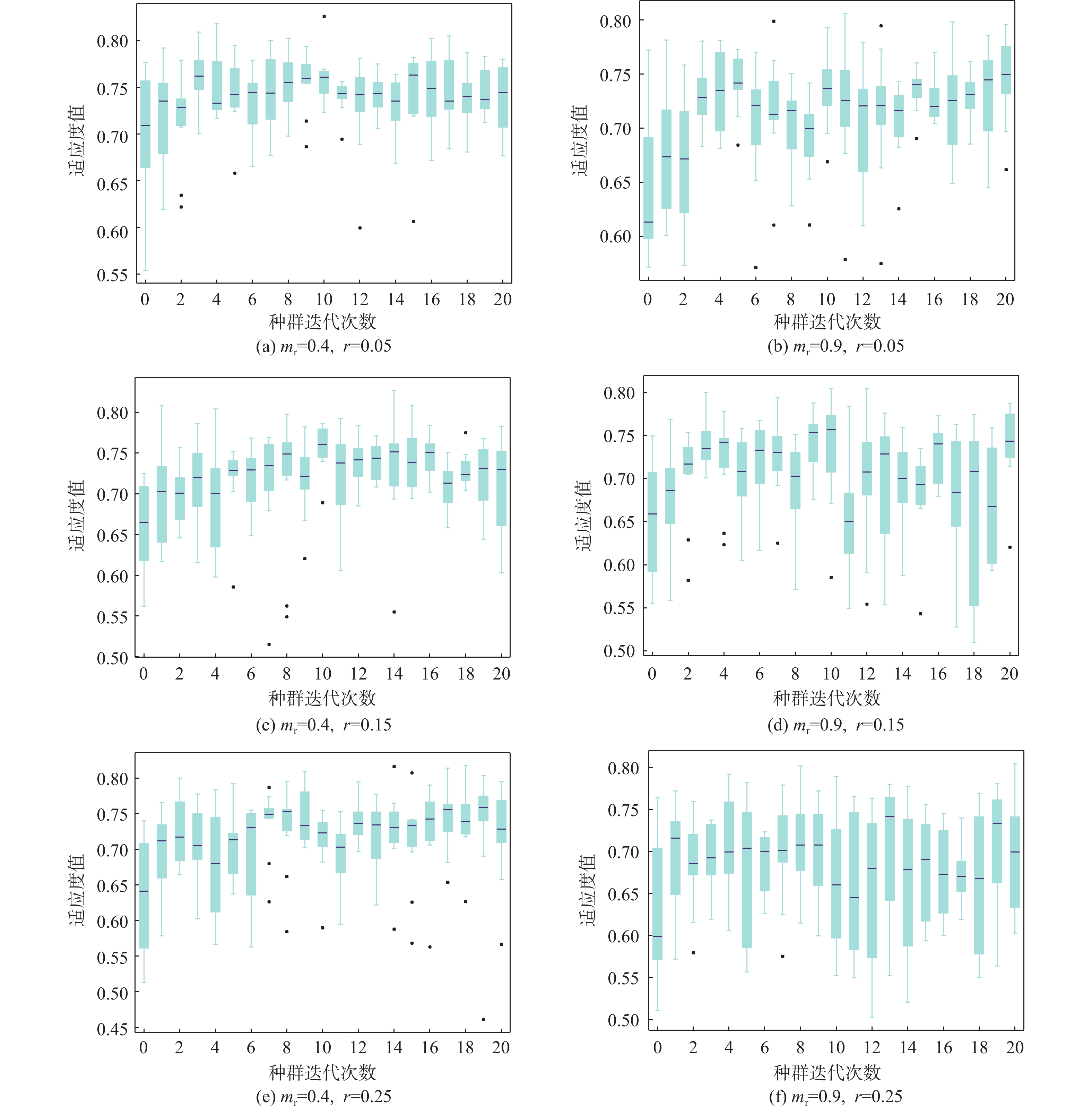
表 2 不同变异参数下种群适应度变化
Table 2. Changes in population fitness with different variation parameters
r 初代平均适应数值 末代平均适应数值 增长率/% mr=0.4 mr=0.9 mr=0.4 mr=0.9 mr=0.4 mr=0.9 0.05 0.696 0.649 0.738 0.746 5.93 14.9 0.15 0.656 0.653 0.708 0.738 7.97 13.1 0.25 0.636 0.629 0.721 0.693 13.3 10.3
下载: 导出CSV
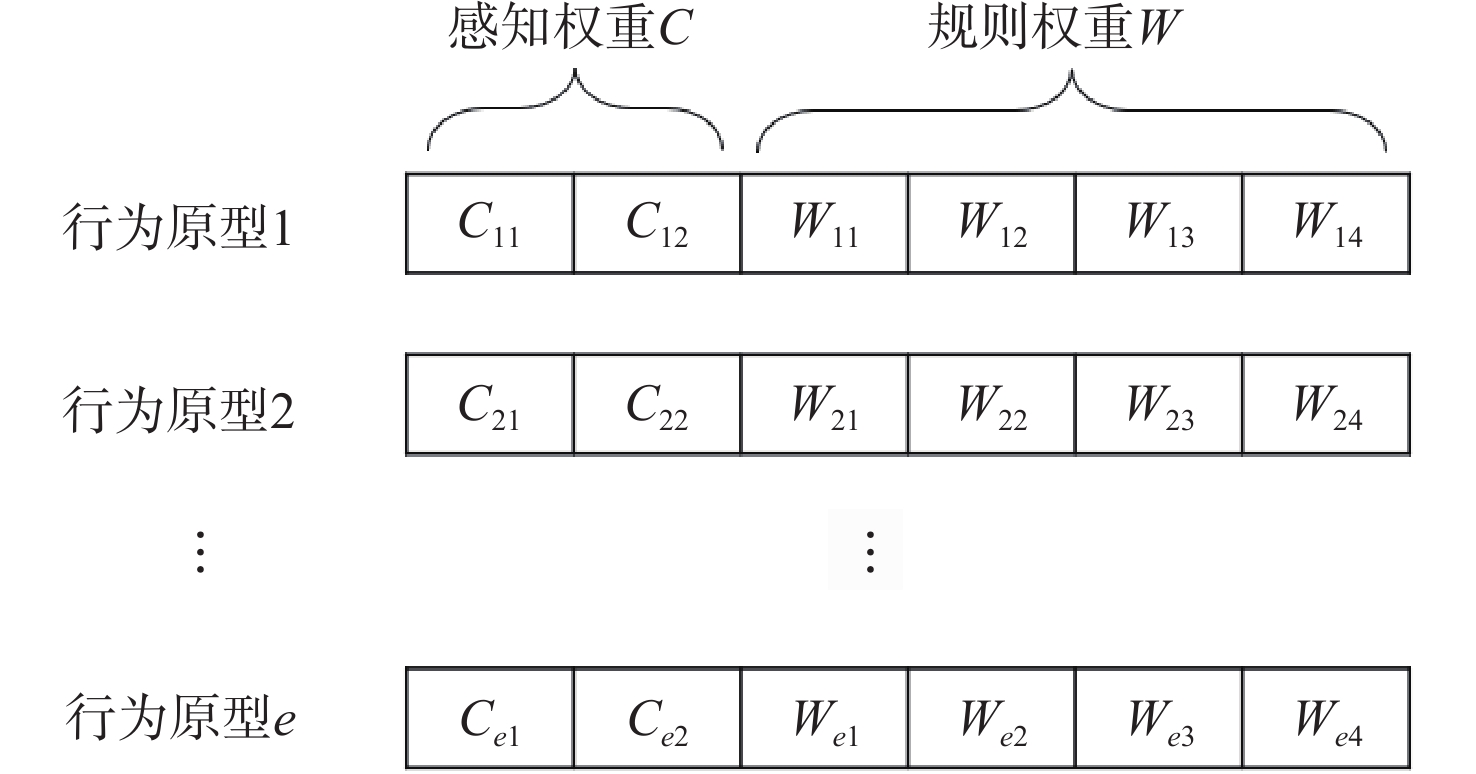
表 3 搜索任务最优个体的决策模型参数
Table 3. Decision model parameters for optimal individual of search task
$ {C}_{1} $ $ {C}_{2} $ $ {W}_{1} $ $ {W}_{2} $ $ {W}_{3} $ $ {W}_{4} $ 0.07 0.07 0.87 0.22 0.78 0.56
下载: 导出CSV
表 4 区域搜索任务场景设置
Table 4. Scenario setting of regional search task
参数 数值 无人机数量$ n $ 1,3,5,10,20 感知视场角$ \psi $/(°) 120 感知视场半径$ {r}_{1},{r}_{2} $/km 0.1,0.5 区域范围$ {E}_{x}\times {E}_{y} $/(km×km) 4×4 无人机初始位置${\boldsymbol{p}}$/km $ x,y\in \left[-1.8,-1.4\right] $ 无人机初始速度${\boldsymbol{v}}$/(k·m−1) $ {v}_{x},{v}_{y}\in \left[\mathrm{0,0.01}\right] $ 仿真步长$ {t}_{\max} $ 3000
下载: 导出CSV
-
[1] MICHAEL F. Unmanned combat air vehicles: Opportunities for the guided weapons industry?[R]. Londn: Royal United Services Institute for Defence and Security Studies, 2008. [2] 牛轶峰, 沈林成, 戴斌, 等. 无人作战系统发展[J]. 国防科技, 2009, 30(5): 1-11. doi: 10.3969/j.issn.1671-4547.2009.05.001NIU Y F, SHEN L C, DAI B, et al. A survey of unmanned combat system development[J]. National Defense Science & Technology, 2009, 30(5): 1-11(in Chinese). doi: 10.3969/j.issn.1671-4547.2009.05.001 [3] 杜梓冰, 张立丰, 陈敬志, 等. 有人/无人机协同作战演示验证试飞关键技术[J]. 航空兵器, 2019, 26(4): 75-81. doi: 10.12132/ISSN.1673-5048.2018.0089DU Z B, ZHANG L F, CHEN J Z, et al. Critical technologies of demonstration flight test of cooperative operation for manned/unmanned aerial vehicles[J]. Aero Weaponry, 2019, 26(4): 75-81(in Chinese). doi: 10.12132/ISSN.1673-5048.2018.0089 [4] BEN-ASHER Y, FELDMAN S, GURFIL P, et al. Distributed decision and control for cooperative UAVs using Ad-Hoc communication[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 511-516. doi: 10.1109/TCST.2007.906314 [5] KIM S W, SEO S W. Cooperative unmanned autonomous vehicle control for spatially secure group communications[J]. IEEE Journal on Selected Areas in Communications, 2012, 30(5): 870-882. doi: 10.1109/JSAC.2012.120604 [6] REZENDE C, BOUKERCHE A, ALMULLA M, et al. The selective use of redundancy for video streaming over vehicular Ad Hoc networks[J]. Computer Networks, 2015, 81: 43-62. doi: 10.1016/j.comnet.2014.12.010 [7] 姜胜园. 无线通信信道建模与物理层安全传输应用研究[D]. 杭州: 浙江工业大学, 2018.JIANG S Y. Research on wireless communication channel modeling and physical layer security transmission application[D]. Hangzhou: Zhejiang University of Technology, 2018(in Chinese). [8] 梁晓龙, 孙强, 尹忠海, 等. 大规模无人系统集群智能控制方法综述[J]. 计算机应用研究, 2015, 32(1): 11-16. doi: 10.3969/j.issn.1001-3695.2015.01.003LIANG X L, SUN Q, YIN Z H, et al. Review on large-scale unmanned system swarm intelligence control method[J]. Application Research of Computers, 2015, 32(1): 11-16(in Chinese). doi: 10.3969/j.issn.1001-3695.2015.01.003 [9] GAZI V, PASSINO K M. Stability analysis of swarms[J]. IEEE Transactions on Automatic Control, 2003, 48(4): 692-697. doi: 10.1109/TAC.2003.809765 [10] 曹丹丹. 无线紫外光协作无人机编队通信拓扑优化方法研究[D]. 西安: 西安理工大学, 2021.CAO D D. Research on wireless ultraviolet collaborative UAV formation communication topology optimization method[D]. Xi’an: Xi’an University of Technology, 2021(in Chinese). [11] 赵诗雪. 无线紫外光协作无人机最优持久编队算法研究[D]. 西安: 西安理工大学, 2020.ZHAO S X. Research on optimal persistent formation algotithm of wireless ultraviolet collaboration UAV[D]. Xi’an: Xi’an University of Technology, 2020(in Chinese). [12] HOLLAND J H. Adaptation in natural and artificial systems: An introductory analysis with applications to biology, control, and artificial intelligence[M]. Cambridge: MIT Press, 1992. [13] KHOEI T T, GHRIBI E, RANGANATHAN P, et al. A performance comparison of encryption/decryption algorithms for UAV swarm communications[J]. Academic Press, 2021, 1: 1-5. [14] XIAO W J, LI M, ALZAHRANI B, et al. A blockchain-based secure crowd monitoring system using UAV swarm[J]. IEEE Network, 2021, 35(1): 108-115. doi: 10.1109/MNET.011.2000210 [15] GHIGLINO P, LAPPAS V. Quaternion error based optimal attitude control applied to pinpoint landing: AIAA 2015-1998[R]. Reston: AIAA, 2015. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 806
- HTML全文浏览量: 44
- PDF下载量: 21
- 被引次数: 0
