



Combination weighting based cloud model evaluation of autonomous capability of ground-attack UAV
-
摘要:
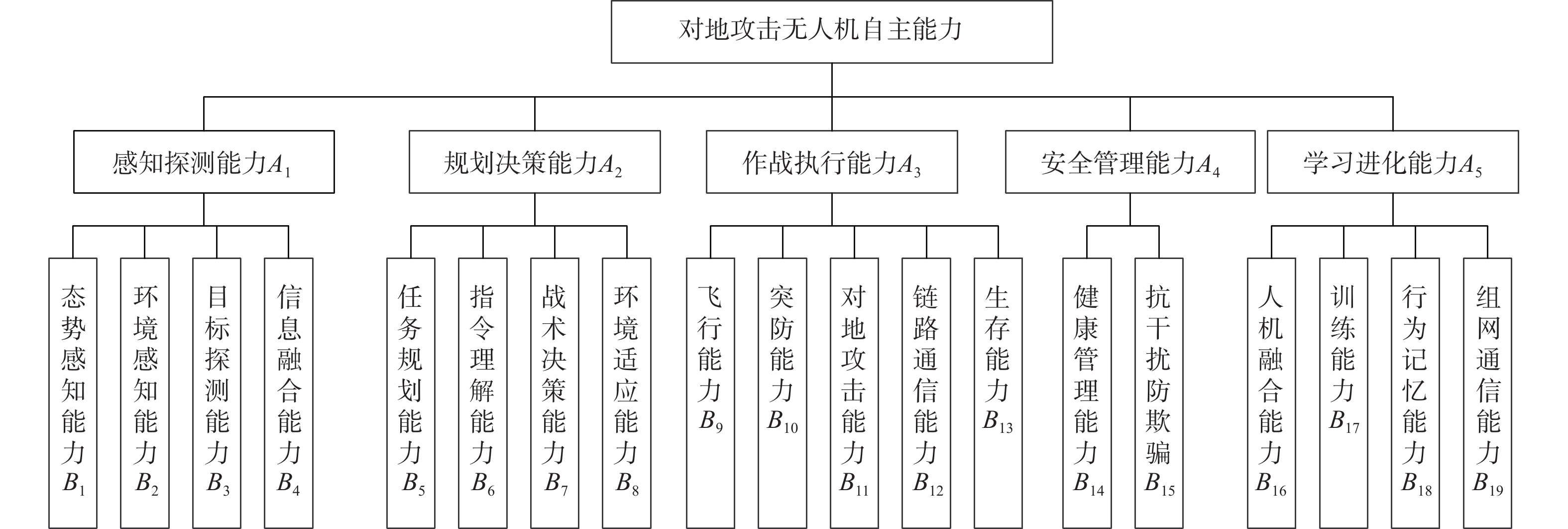
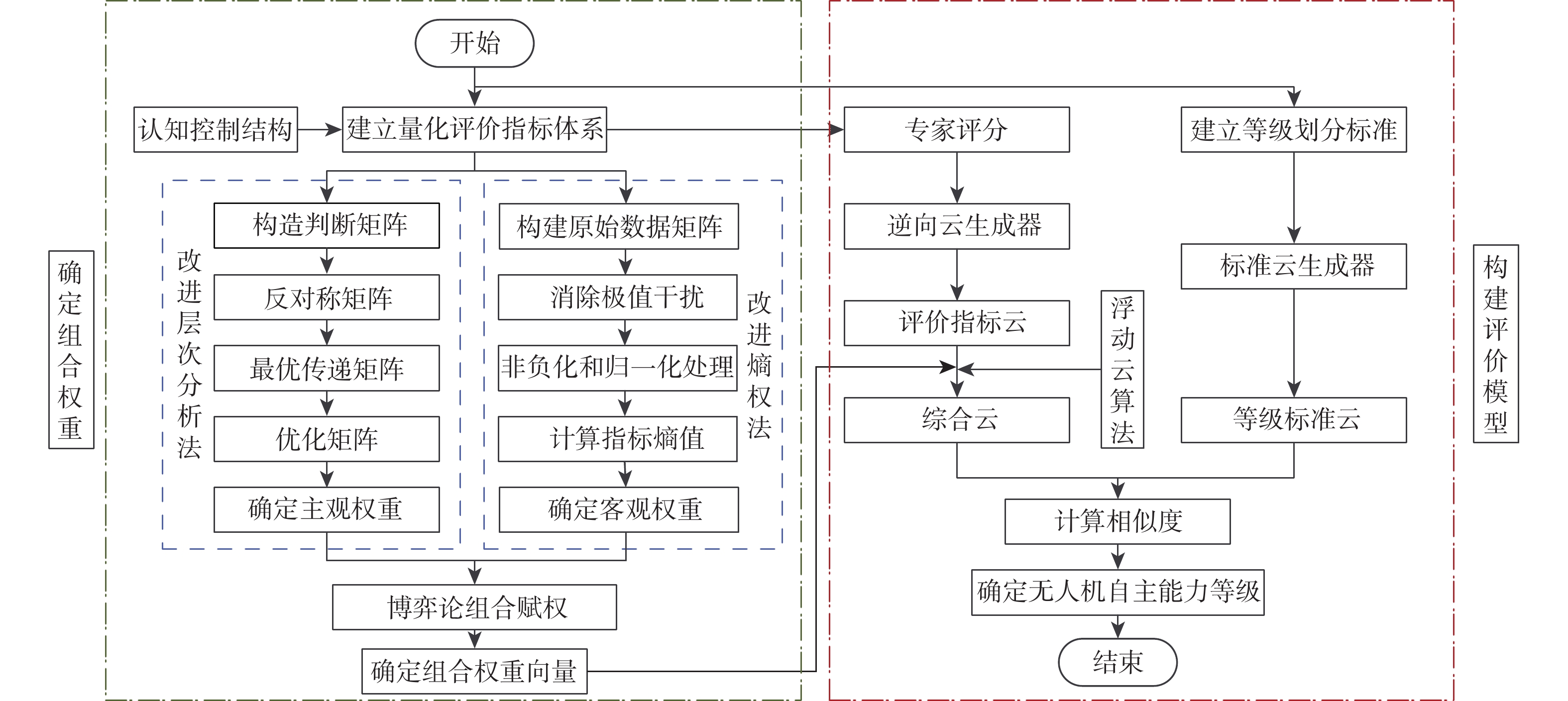
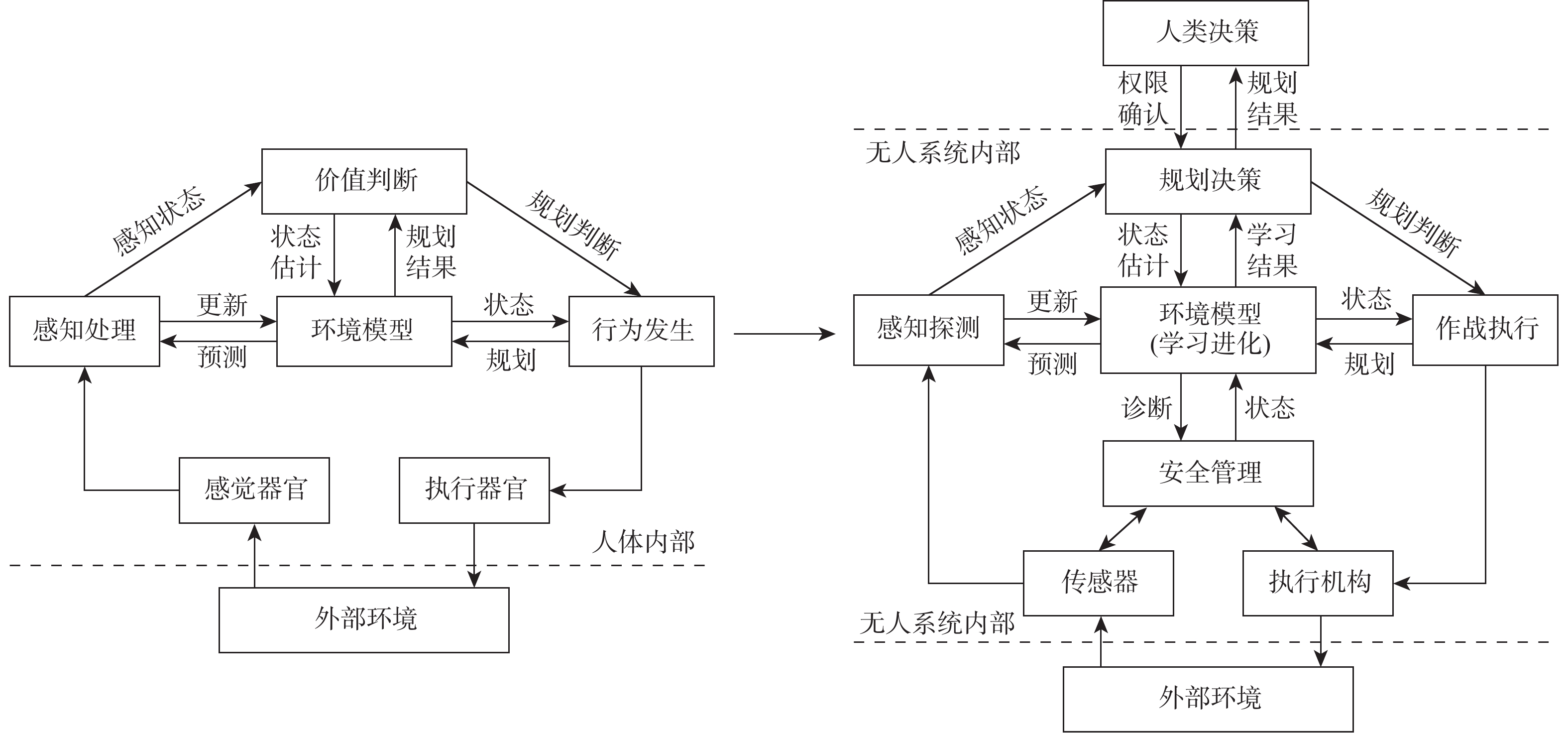
针对对地攻击无人机自主能力量化评价的不确定性问题,提出基于组合赋权的云模型评价方法。基于认知控制结构,从感知探测、规划决策、作战执行、安全管理和学习进化5个方面构建自主能力评价指标体系。运用基于博弈论的组合赋权方法,结合改进层次分析法和改进熵权法确定组合权重,克服了单一赋权方法确定指标权重的片面性。考虑自主能力评价过程的模糊性和随机性,提出一种对地攻击无人机自主能力云模型评价方法,采用浮动云算法实现评价指标云的有效综合。对3种对地攻击无人机进行仿真验证,结果表明:所提方法综合考虑评价对象的主客观因素,消除了单一赋权方法的局限性,权重分配科学合理。自主能力云模型量化评价能够有效区分不同类型对地攻击无人机自主能力等级的差异性,评价结果准确可信。
Abstract:To address the uncertainty in quantitative evaluation of autonomous capability of ground-attack UAVs, an evaluation method with the cloud model is proposed based on combined weightings. Based on the cognitive control structure, the evaluation index system of autonomous capability is constructed from five aspects: perceptual detection, planning and decision-making, combat execution, security management, and learning evolution. The one sidedness of determining the index weight by a single weighting method is overcome, using the combination weighting method based on game theory, and combined with the improved analytic hierarchy process and the improved entropy weight method to determine the combination weight. Considering the fuzziness and randomness of the autonomous capability evaluation process, an evaluation method based on cloud model is proposed for the autonomous capability of ground-attack UAVs, and the floating cloud algorithm is used to realize the effective synthesis of the evaluation index cloud. The simulation results of three ground-attack UAVs show that the proposed method considers both subjective and objective factors of the evaluation object, eliminates the limitations of a single weighting method, and achieves scientific and reasonable weight distribution. The quantitative evaluation of autonomous capability of the cloud model can effectively distinguish autonomous capability levels of different types of ground-attack UAVs, with accurate and reliable evaluation results.
-
Key words:
- autonomous caoability /
- ground-attack UAV /
- combination weighting /
- game theory /
- cloud model
-
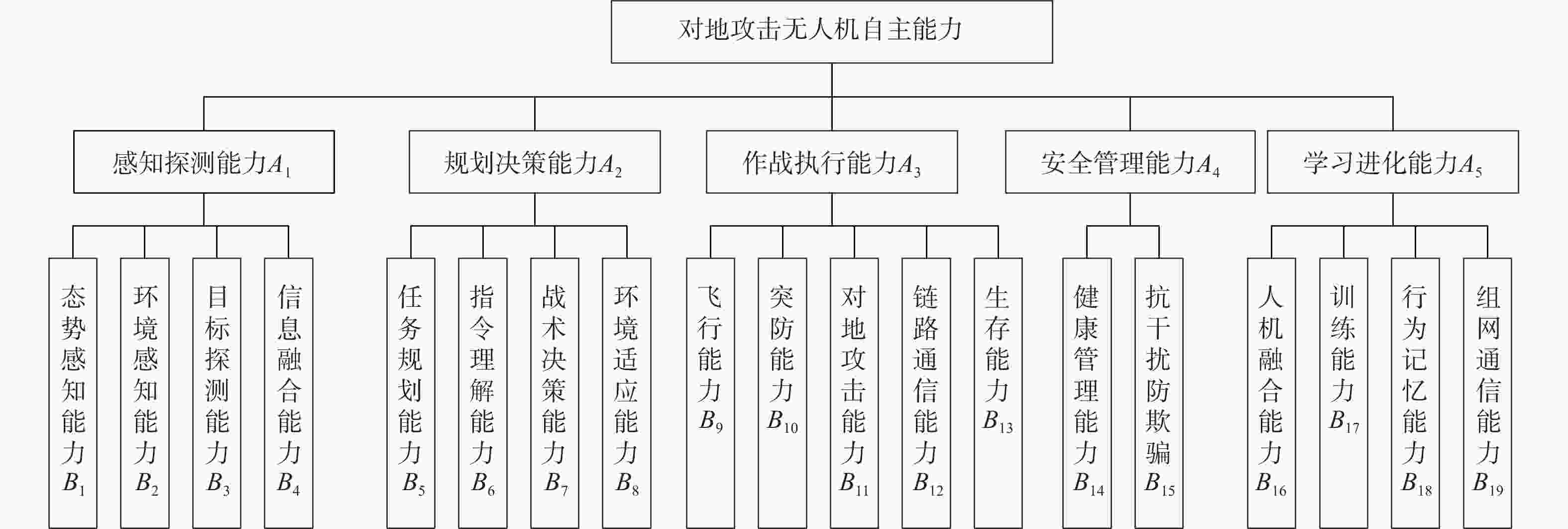
图 2 对地攻击无人机自主能力评价指标体系
Figure 2. Evaluation index system of autonomous capability of ground-attack UAV

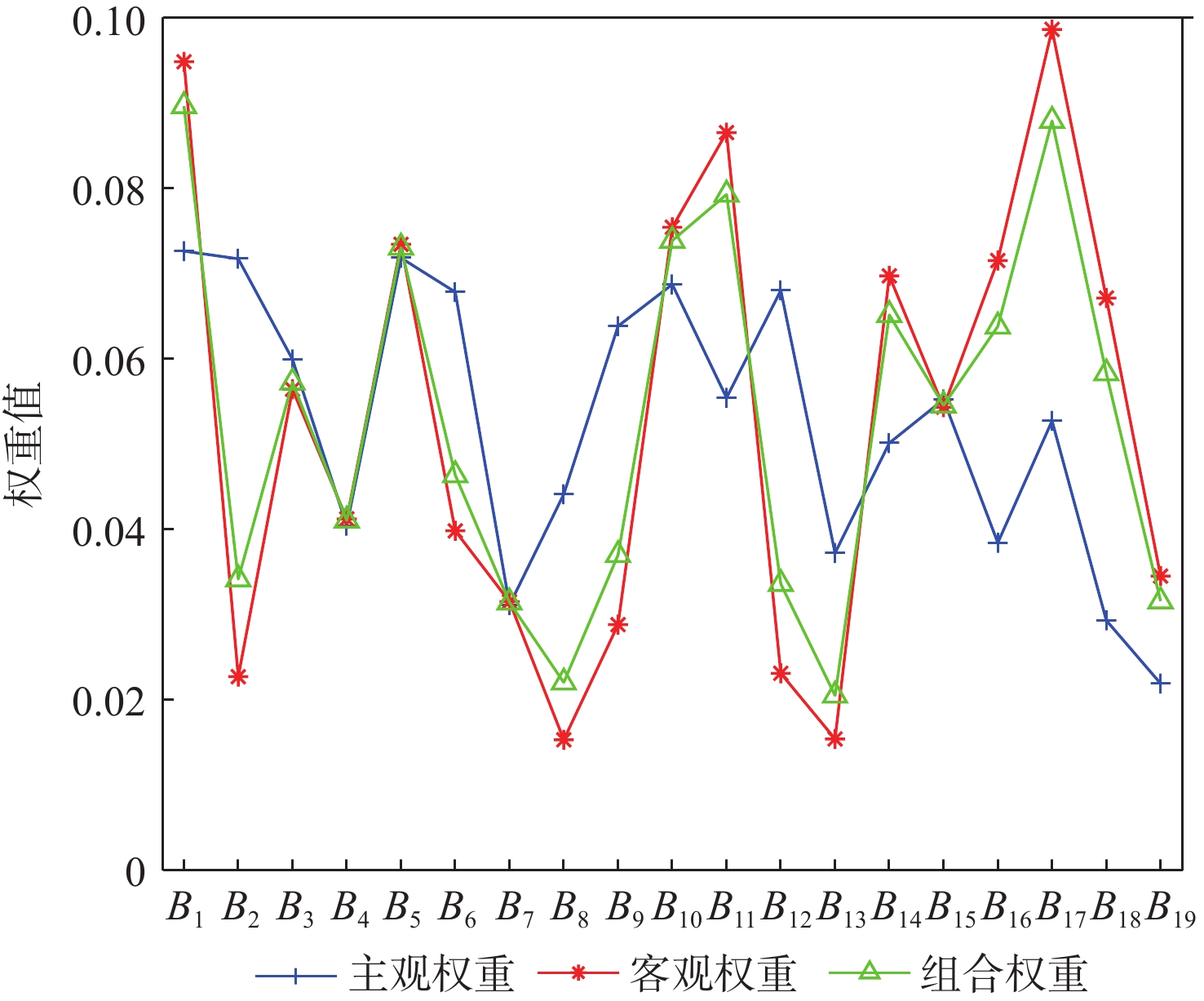
图 4 自主能力评价指标权重分布
Figure 4. Weight distribution of evaluation index of autonomous capability
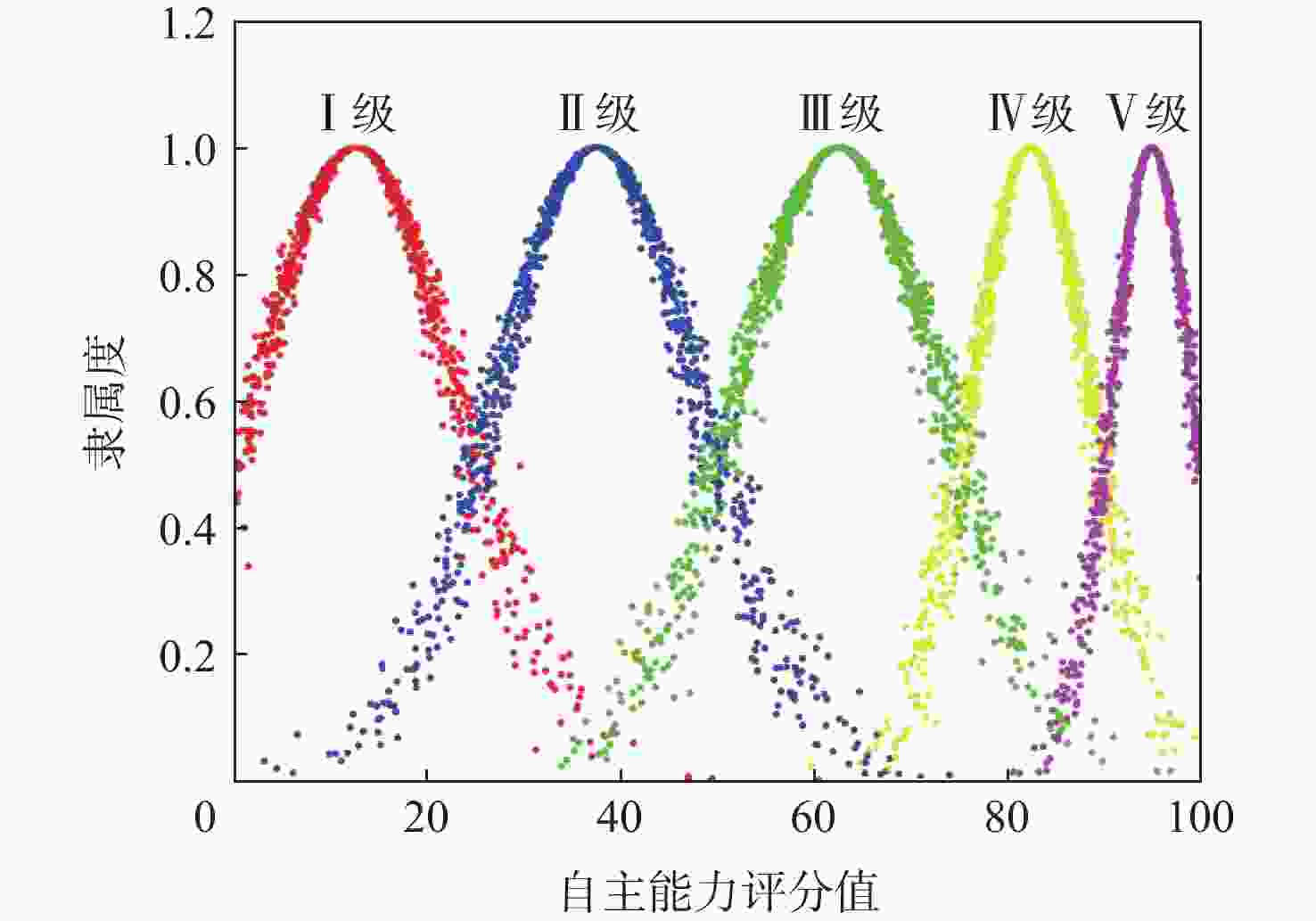
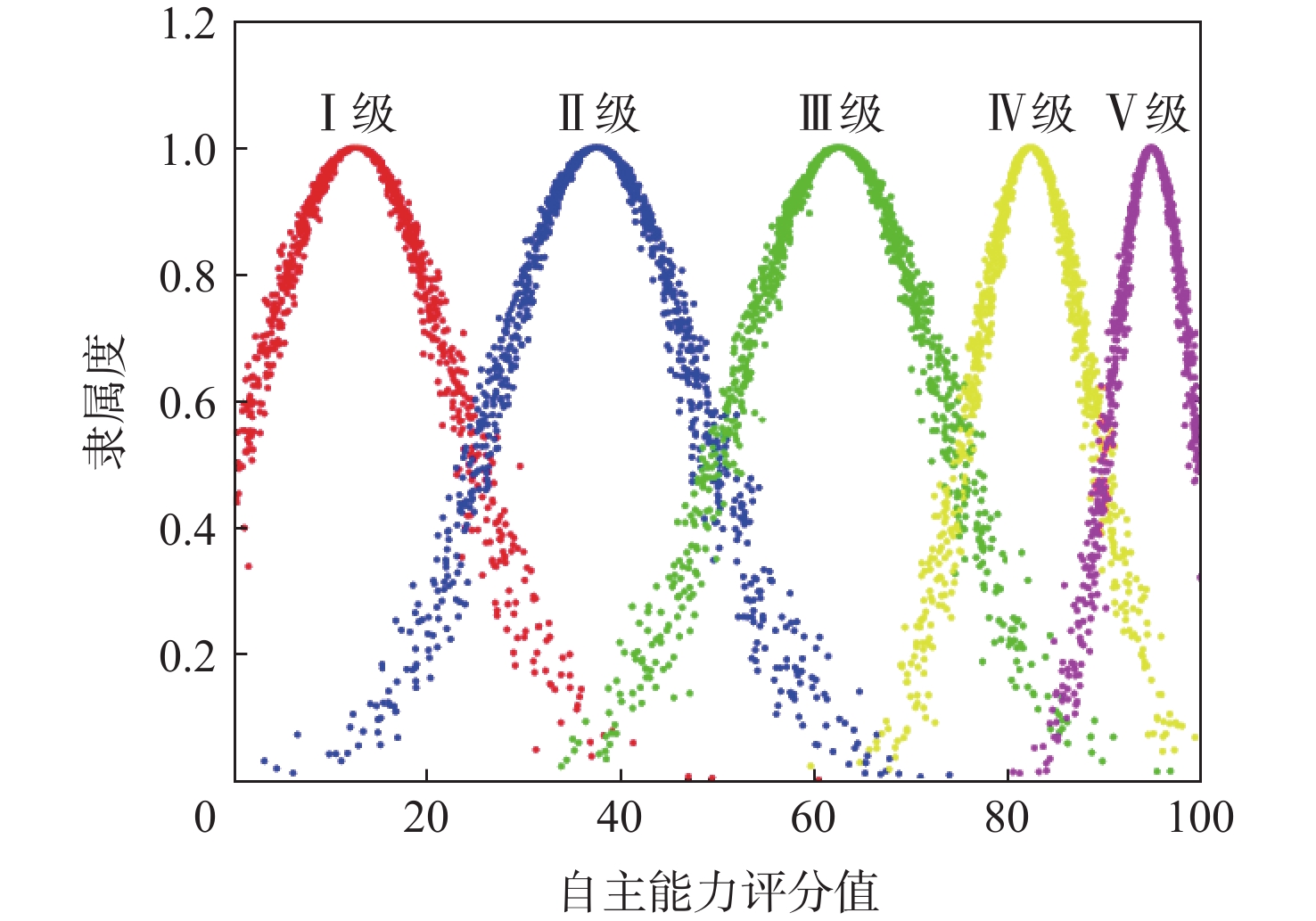
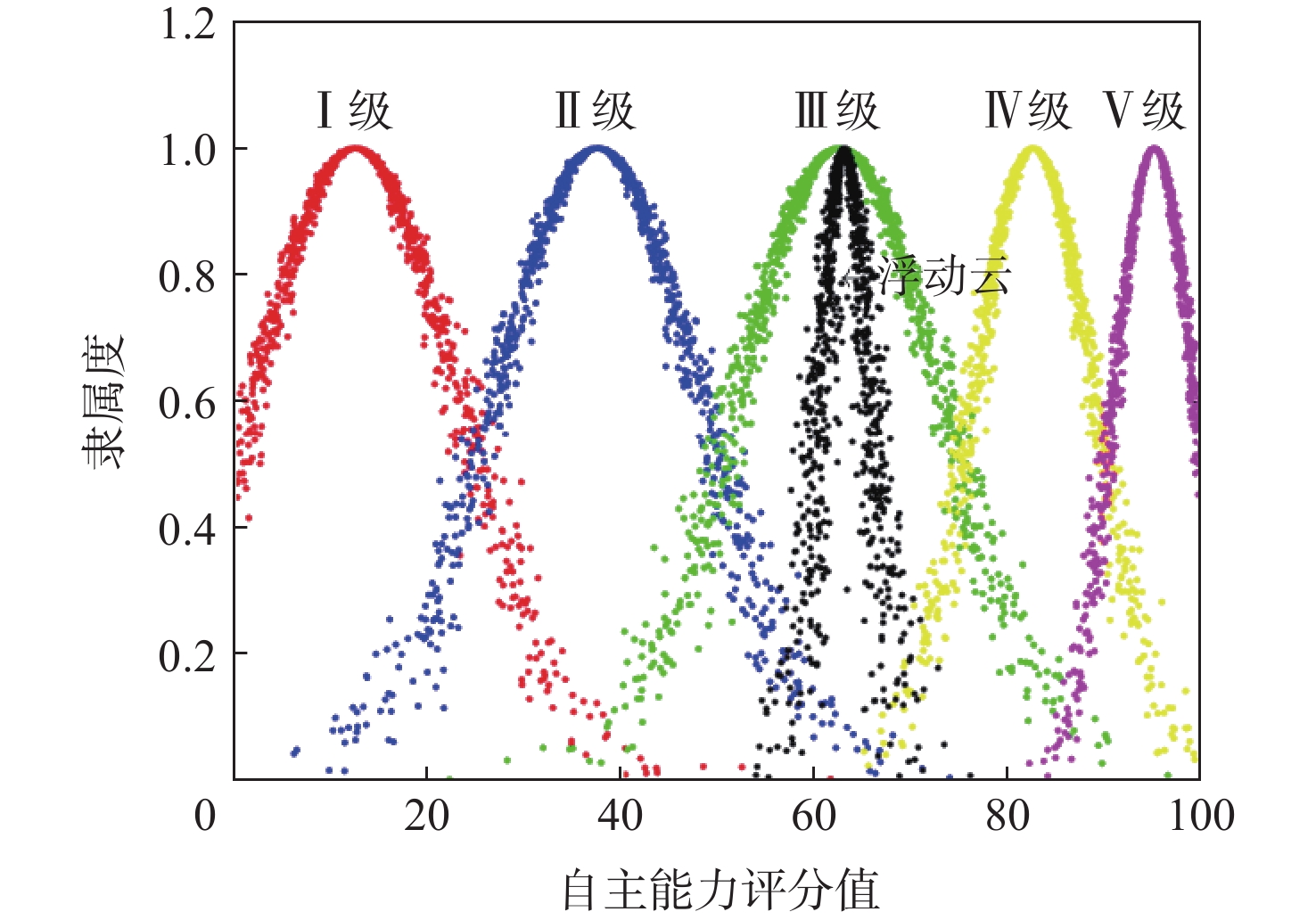
图 5 自主能力评价等级标准云图
Figure 5. Cloud chart of evaluation level standard of autonomous capability

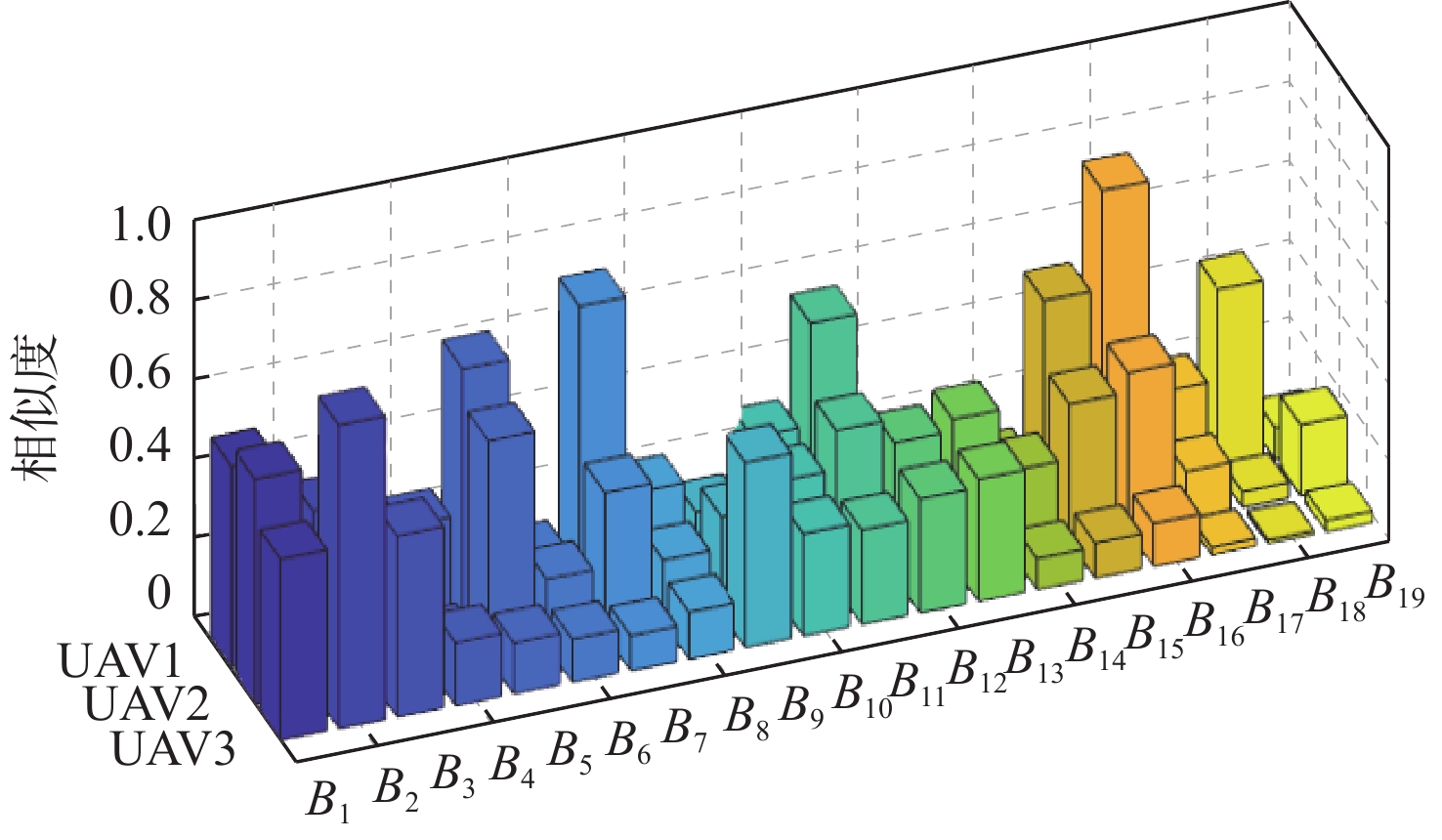
图 8 指标与综合评价结果相似度分布
Figure 8. Similarity distribution of between indicators and comprehensive evaluation results

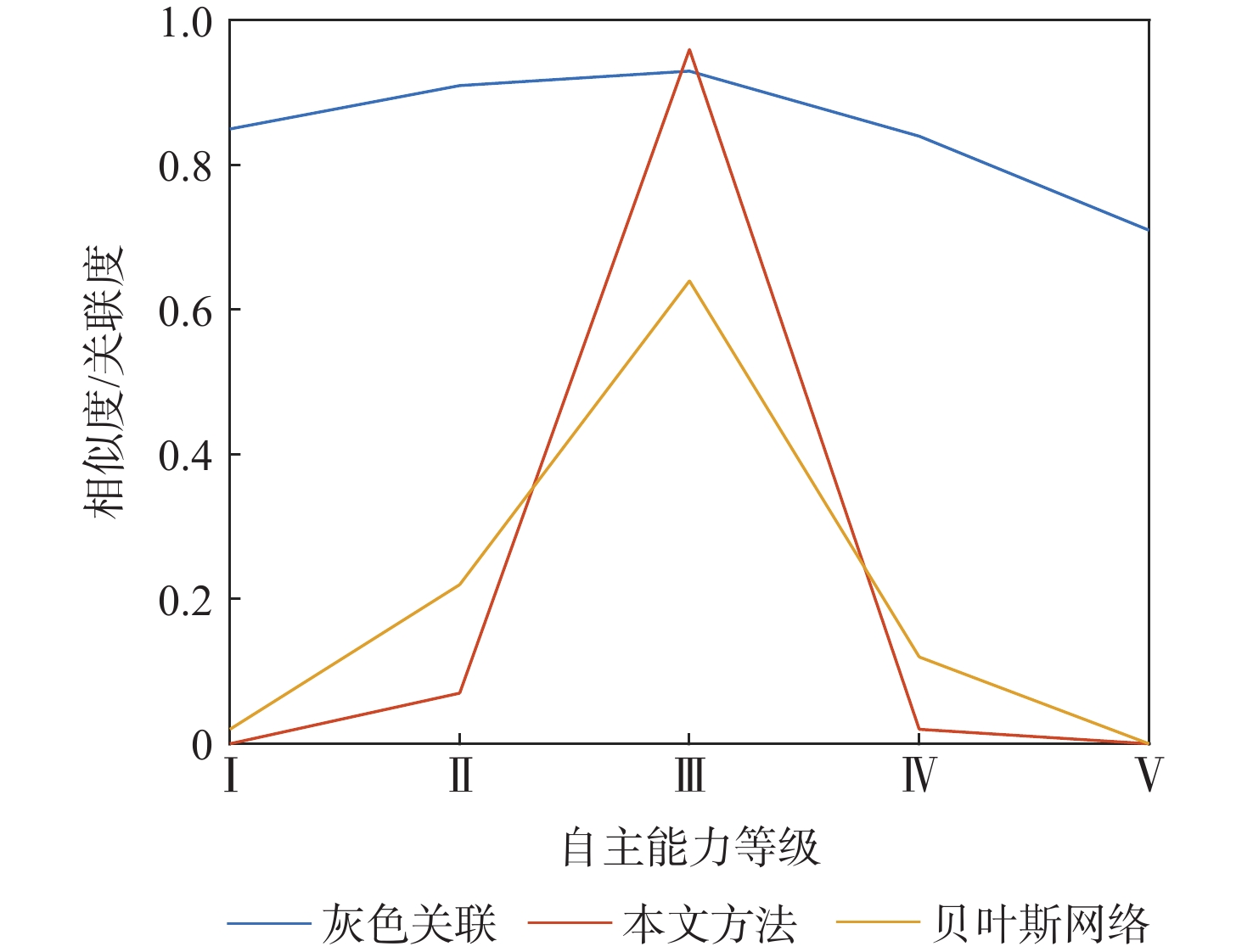
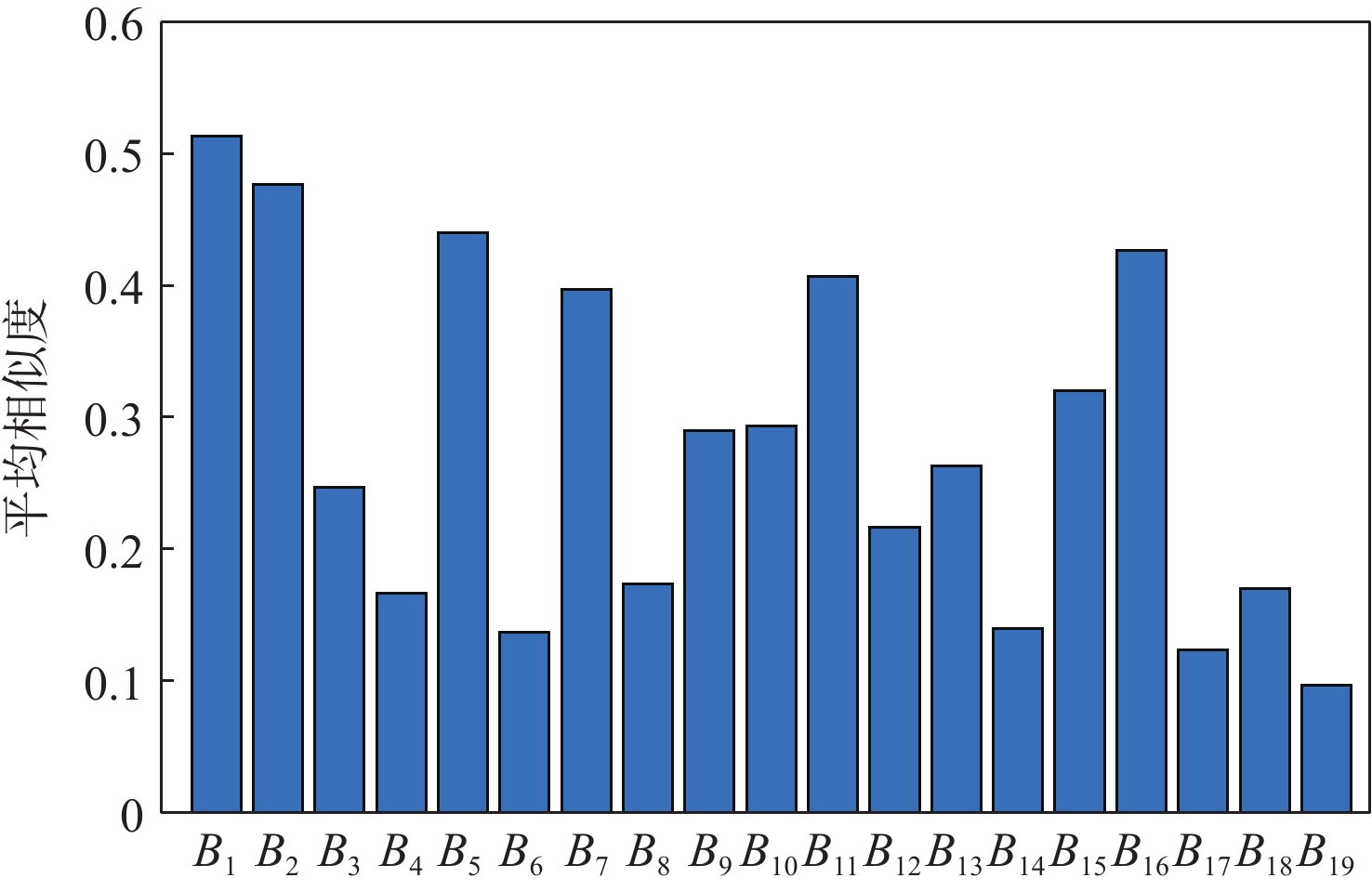
图 9 指标与综合评价结果平均相似度分布
Figure 9. Average similarity distribution between indicators and comprehensive evaluation results
表 1 自主能力等级划分标准
Table 1. Classification standard of autonomous capability
等级及
分值区间等级描述 感知探测能力 规划决策能力 作战执行能力 安全管理能力 学习进化能力 Ⅰ
[0,25]单机简单计划
任务探测地面特定
目标执行预编程的
规划任务单机对地攻击 状态报告 计算、存储、数据处理 Ⅱ
(25,50]单机复杂计划
任务外部态势及
自身态势感知面向飞行状态的
适应性规划单机攻击并
毁伤评估实时故障诊断与
隔离程序自动化 Ⅲ
(50,75]单机实时规划
任务复杂环境感知 航路重规划 及时规避部分威胁 简单故障修复 计算智能、智能算法 Ⅳ
(75,90]多机任务协同 多机信息共享 长机分配战术决策 多机协助攻击 故障预测及容错控制 简单思维智慧 Ⅴ
(90,100]全自主集群 分布式/集群态势
感知与信息共享分布式/集群战略决策 集群协同攻击 群组诊断、冲突消解 认知/记忆智能、自主学习  下载: 导出CSV
下载: 导出CSV
表 2 无人机基本性能参数
Table 2. Basic performance parameters of UAV
UAV 长/m 翼展/m 高/m 翼面积/m2 最大起飞重量/kg 升限/m 最高速度/(km·h−1) 巡航速度/(km·h−1) UAV1 11.7 24 3.8 29.5 5670 12192 460 398 UAV2 8 17 2.1 17.8 1633 8800 280 110 UAV3 8.22 14.8 2.1 11.5 1020 7620 217 165 UAV 雷达分辨率/m 目标定位精度/m 导弹外挂数量/枚 起降距离/m 续航时间/h 有效载荷/kg 发动机功率/kW 最大航程/km UAV1 0.1 0.10 8 600 40 1360 661.5 10186 UAV2 0.2 0.20 4 640 30 360 99.2 4800 UAV3 0.3 0.25 2 667 24 200 84.5 3704
下载: 导出CSV
表 3 归一化指标量化值
Table 3. Normalized index quantization value
UAV ${B_1}$ ${B_2}$ ${B_3}$ ${B_4}$ ${B_5}$ ${B_6}$ ${B_7}$ ${B_8}$ ${B_9}$ ${B_{10}}$ UAV1 0.84 0.87 0.75 0.66 0.81 0.73 0.71 0.73 0.67 0.82 UAV2 0.56 0.75 0.61 0.62 0.54 0.62 0.57 0.61 0.62 0.57 UAV3 0.40 0.62 0.43 0.42 0.43 0.46 0.46 0.55 0.47 0.43 UAV ${B_{11}}$ ${B_{12}}$ ${B_{13}}$ ${B_{14}}$ ${B_{15}}$ ${B_{16}}$ ${B_{17}}$ ${B_{18}}$ ${B_{19}}$ UAV1 0.76 0.74 0.81 0.82 0.79 0.80 0.88 0.80 0.80 UAV2 0.53 0.65 0.71 0.62 0.59 0.58 0.54 0.56 0.68 UAV3 0.38 0.52 0.60 0.44 0.46 0.41 0.44 0.45 0.50
下载: 导出CSV
表 4 指标权重及UAV1云模型特征参数
Table 4. Index weight, and characteristic parameters of UAV1 cloud model
指标 主观权重 客观权重 组合权重 UAV1指标云 $ {B_1} $ 0.0726 0.0948 0.0896 (62.6,2.44,0.14) $ {B_2} $ 0.0717 0.0227 0.0341 (68.4,3.38,0.96) $ {B_3} $ 0.0599 0.0564 0.0572 (55.6,2.71,1.18) $ {B_4} $ 0.0404 0.0412 0.0410 (60.0,3.38,0.79) $ {B_5} $ 0.0718 0.0734 0.0730 (62.4,6.74,2.98) $ {B_6} $ 0.0678 0.0398 0.0463 (67.8,2.76,1.68) $ {B_7} $ 0.0311 0.0315 0.0314 (63.0,2.13,1.02) $ {B_8} $ 0.0441 0.0153 0.0220 (59.6,1.74,0.85) $ {B_9} $ 0.0638 0.0288 0.0370 (66.2,4.61,2.53) $ {B_{10}} $ 0.0687 0.0754 0.0738 (60.2,3.01,0.53) $ {B_{11}} $ 0.0554 0.0865 0.0792 (64.8,1.88,1.37) $ {B_{12}} $ 0.0680 0.0231 0.0336 (72.4,1.57,0.91) $ {B_{13}} $ 0.0372 0.0154 0.0205 (56.8,5.73,1.65) $ {B_{14}} $ 0.0501 0.0697 0.0651 (59.2,2.36,0.54) $ {B_{15}} $ 0.0552 0.0543 0.0545 (57.4,1.42,0.66) $ {B_{16}} $ 0.0384 0.0715 0.0638 (63.0,1.57,0.08) $ {B_{17}} $ 0.0527 0.0986 0.0879 (66.4,1.67,0.49) $ {B_{18}} $ 0.0293 0.0671 0.0583 (64.8,2.37,0.86) $ {B_{19}} $ 0.0219 0.0345 0.0316 (69.6,1.93,1.15)
下载: 导出CSV
表 5 自主能力等级标准云模型
Table 5. Cloud model of autonomous capability level standard
等级 分值区间 云模型特征参数 Ⅰ [0,25] (12.5,10.617,1.06) Ⅱ (25,50] (37.5,10.617,1.06) Ⅲ (50,75] (62.5,10.617,1.06) Ⅳ (75,90] (82.5,6.370,0.64) Ⅴ (90,100] (95,4.247,0.42)
下载: 导出CSV
表 6 UAV1专家评分
Table 6. UAV1 expert scoring
专家 ${B_1}$ ${B_2}$ ${B_3}$ ${B_4}$ ${B_5}$ ${B_6}$ ${B_7}$ ${B_8}$ ${B_9}$ ${B_{10}}$ ${B_{11}}$ ${B_{12}}$ ${B_{13}}$ ${B_{14}}$ ${B_{15}}$ ${B_{16}}$ ${B_{17}}$ ${B_{18}}$ ${B_{19}}$ 1 62 72 57 66 60 64 65 56 66 54 71 73 47 55 59 64 67 65 73 2 64 65 60 59 73 68 63 59 54 58 65 72 52 61 56 63 68 63 68 3 59 72 51 55 54 69 60 61 71 69 65 72 61 63 59 60 70 68 67 4 67 68 56 57 64 68 64 60 75 60 66 75 62 60 57 66 74 62 71 5 64 70 56 58 60 71 62 57 62 59 64 70 63 58 58 64 64 64 69 6 58 71 54 64 56 63 60 59 62 54 62 72 55 57 57 63 63 63 70 7 60 66 61 62 58 68 70 63 65 62 64 76 56 60 58 63 66 65 70 8 60 65 55 63 58 65 64 61 68 63 64 74 42 62 57 61 67 66 70 9 64 71 56 61 55 68 62 61 65 60 65 71 62 56 56 64 69 69 69 10 63 63 54 55 70 72 63 60 64 59 63 72 62 61 57 65 70 68 67 11 64 70 53 58 69 70 60 59 69 59 68 72 54 56 55 62 62 62 67 12 64 70 57 63 65 70 65 59 65 63 65 70 62 59 60 64 64 64 69 13 62 67 58 59 66 65 62 58 65 62 65 73 59 60 56 62 65 63 72 14 75 72 54 59 58 65 62 61 67 61 62 75 58 59 59 61 67 67 69 15 63 65 52 61 70 71 63 60 75 60 63 69 57 61 57 63 61 63 73
下载: 导出CSV
表 7 相似度及等级评定结果
Table 7. Similarity and grade evaluation results
UAV 自相似度 评定结果 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ 本文
方法灰色
关联贝叶斯
网络UAV1 0 0.07 0.96 0.02 0 Ⅲ Ⅲ Ⅲ UAV2 0.21 0.82 0.02 0 0 Ⅱ Ⅱ Ⅱ UAV3 0.76 0.23 0.01 0 0 Ⅰ Ⅰ Ⅰ
下载: 导出CSV
-
[1] 卢新来, 杜子亮, 许赟. 航空人工智能概念与应用发展综述[J]. 航空学报, 2021, 42(4): 251-264.LU X L, DU Z L, XU Y. Review on basic concept and applications for artificial intelligence in aviation[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 251-264(in Chinese). [2] LANDRETH L J M. Autonomous horizons: The way forward[R]. Washington D.C.: Office of the Air Force Chief Scientist, 2019. [3] 董文洪, 马培蓓, 纪军. 攻击型无人机作战过程研究[J]. 战术导弹技术, 2018(1): 9-15.DONG W H, MA P B, JI J. Research on combat processing of UCAV[J]. Tactical Missile Technology, 2018(1): 9-15(in Chinese). [4] 杜梓冰, 陈银娣. 无人机自主作战能力试验评价技术综述[J]. 航空兵器, 2021, 28(6): 58-65. doi: 10.12132/ISSN.1673-5048.2021.0083DU Z B, CHEN Y D. Review on testing and evaluation of UAV’s autonomous operational ability[J]. Aero Weaponry, 2021, 28(6): 58-65(in Chinese). doi: 10.12132/ISSN.1673-5048.2021.0083 [5] 尹文强. 基于改进层次分析法的无人机自主能力评价方法[J]. 飞行力学, 2021, 39(5): 82-87.YIN W Q. Research on UAV autonomy capability evaluation method based on improved analytic hierarchy process[J]. Flight Dynamics, 2021, 39(5): 82-87(in Chinese). [6] 丰雨轩, 刘树光, 解武杰, 等. 基于改进Hopfield神经网络的对地攻击型无人机自主能力评价[J]. 北京航空航天大学学报, 2021, 47(4): 835-843.FENG Y X, LIU S G, XIE W J, et al. Autonomous capability evaluation of ground-attack UAV based on improved Hopfield neural network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(4): 835-843(in Chinese). [7] 丰雨轩, 刘树光, 解武杰. 基于灰色关联分析的对地攻击型无人机自主能力评价[J]. 电光与控制, 2021, 28(6): 16-19.FENG Y X, LIU S G, XIE W J. Autonomous capability evaluation of ground-attacking UAVs based on gray relational analysis[J]. Electronics Optics & Control, 2021, 28(6): 16-19(in Chinese). [8] HAN Y M, FANG D, ZHANG H Y, et al. Evaluation of attack capability of UAV intelligent swarm based on AHP fuzzy evaluation[J]. Journal of Physics:Conference Series, 2020, 1651(1): 012012. doi: 10.1088/1742-6596/1651/1/012012 [9] 陈宏建. 基于贝叶斯网络的无人机编队作战效能评估方法研究[D]. 南京: 南京邮电大学, 2020.CHEN H J. Research on combat effectiveness evaluation method of UAV formation based on Bayesian network[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2020(in Chinese). [10] ELTABEY M M, MAWGOUD A A, ABU-TALLEB A. The autonomy evolution in unmanned aerial vehicle: Theory, challenges and techniques[C]// Proceedings of the International conference on Advances Intelligent Systems and Informatics. Berlin: Springer, 2020: 527-536. [11] 王越超, 刘金国. 无人系统的自主性评价方法[J]. 科学通报, 2012, 57(15): 1290-1299. doi: 10.1360/csb2012-57-15-1290WANG Y C, LIU J G. Evaluation methods for the autonomy of unmanned systems[J]. Chinese Science Bulletin, 2012, 57(15): 1290-1299(in Chinese). doi: 10.1360/csb2012-57-15-1290 [12] MORENO-JIMÉNEZ J M, AGUARÓN J, ESCOBAR M T, et al. Group decision support using the analytic hierarchy process[M]// KILGOUR D M, EDEN C. Handbook of group decision and negotiation. Berlin: Springer, 2021: 947-975. [13] NG J. Delphi method: A qualitative approach for quantitative results[J]. Value in Health, 2018, 21: S54. [14] 刘树光, 茹乐, 王柯. 无人机自主性评价方法新进展[J]. 飞航导弹, 2019(2): 43-49.LIU S G, RU L, WANG K. New progress in evaluation methods of UAV autonomy[J]. Aerodynamic Missile Journal, 2019(2): 43-49(in Chinese). [15] CLOUGH B T. Metrics, schmetrics! How the heck do you determine a UAV’s autonomy anyway?[C]//Proceedings of the Performance Metrics for Intelligent Systems Workshop. Amsterdam: E1sevier, 2002: 313-319. [16] 陈宗基, 魏金钟, 王英勋, 等. 无人机自主控制等级及其系统结构研究[J]. 航空学报, 2011, 32(6): 1075-1083.CHEN Z J, WEI J Z, WANG Y X, et al. UAV autonomous control levels and system structure[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(6): 1075-1083(in Chinese). [17] 邹立岩, 张明智, 荣明. 智能无人机集群概念及主要发展趋势分析[J]. 战术导弹技术, 2019(5): 1-11.ZOU L Y, ZHANG M Z, RONG M. Analysis of intelligent unmanned aircraft systems swarm concept and main development trend[J]. Tactical Missile Technology, 2019(5): 1-11(in Chinese). [18] 王红旗, 牟泽龙, 郭亚子. 基于层次分析与模糊综合评价的无人机精确保障效能评估[J]. 舰船电子工程, 2021, 41(5): 109-112. doi: 10.3969/j.issn.1672-9730.2021.05.025WANG H Q, MOU Z L, GUO Y Z. Effectiveness evaluation of UAV precise support based on AHP and fuzzy comprehensive evaluation[J]. Ship Electronic Engineering, 2021, 41(5): 109-112(in Chinese). doi: 10.3969/j.issn.1672-9730.2021.05.025 [19] 董晓旭, 何安瑞, 孙文权, 等. 应用熵权-TOPSIS法的加热炉炉温在线设定模型[J]. 哈尔滨工业大学学报, 2017, 49(7): 119-124. doi: 10.11918/j.issn.0367-6234.201602050DONG X X, HE A R, SUN W Q, et al. On-line temperature setup model of reheating furnace based on entropy weight-TOPSIS method[J]. Journal of Harbin Institute of Technology, 2017, 49(7): 119-124(in Chinese). doi: 10.11918/j.issn.0367-6234.201602050 [20] QIAO C, WANG Y, LI C H, et al. Application of extension theory based on improved entropy weight method to rock slope analysis in cold regions[J]. Geotechnical and Geological Engineering, 2021, 39(6): 4315-4327. doi: 10.1007/s10706-021-01760-9 [21] MARDEN J R, SHAMMA J S. Game theory and control[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2018, 1: 105-134. doi: 10.1146/annurev-control-060117-105102 [22] WU Z Y, CHEN G D, YAO J J. A driving safety evaluation algorithm based on TOPSIS model of game theory combination[C]//Proceedings of the 7th Asia International Symposinum on Mechatronics. Berlin : Springer, 2019: 756-768. [23] LAI C G, CHEN X H, CHEN X Y, et al. A fuzzy comprehensive evaluation model for flood risk based on the combination weight of game theory[J]. Natural Hazards, 2015, 77(2): 1243-1259. doi: 10.1007/s11069-015-1645-6 [24] WANG K Q, LIU H C, LIU L P, et al. Green supplier evaluation and selection using cloud model theory and the QUALIFLEX method[J]. Sustainability, 2017, 9(5): 688. doi: 10.3390/su9050688 [25] WU H W, ZHEN J, ZHANG J. Urban rail transit operation safety evaluation based on an improved CRITIC method and cloud model[J]. Journal of Rail Transport Planning & Management, 2020, 16: 100206. [26] 权家乐, 钱杭. 基于指数模型的无人机侦察能力评估[J]. 科技创新与应用, 2020(9): 65-66.QUAN J L, QIAN H. Evaluation of UAV reconnaissance capability based on exponential model[J]. Technology Innovation and Application, 2020(9): 65-66(in Chinese). [27] 阴小晖. 有人机/无人机协同作战效能评估研究[D]. 南昌: 南昌航空大学, 2013.YIN X H. Research on the effectiveness evaluation for cooperative combat of manned vehicle /unmanned aerial vehicle[D]. Nanchang: Nanchang Hangkong University, 2013(in Chinese). [28] 董彦非, 胡涛. 战斗机综合作战效能评估建模方法[J]. 火力与指挥控制, 2012, 37(2): 9-11. doi: 10.3969/j.issn.1002-0640.2012.02.003DONG Y F, HU T. Synthesized combat effectiveness assessment modeling method for fighter plane[J]. Fire Control & Command Control, 2012, 37(2): 9-11(in Chinese). doi: 10.3969/j.issn.1002-0640.2012.02.003 [29] 潘长鹏, 韩玉龙, 庄益夫. 舰载无人机编队协同对海突击作战效能评估指标体系研究[J]. 战术导弹技术, 2019(2): 25-32.PAN C P, HAN Y L, ZHUANG Y F. Research on the operational effectiveness evaluation indices system of ship-based UAV formation cooperative air-to-sea attack[J]. Tactical Missile Technology, 2019(2): 25-32(in Chinese). [30] 赵海涛, 高士顺, 王海军, 等. 无人机自主通信和组网能力评估方法[J]. 通信学报, 2020, 41(8): 87-98.ZHAO H T, GAO S S, WANG H J, et al. Evaluation method for autonomous communication and networking capability of UAV[J]. Journal on Communications, 2020, 41(8): 87-98(in Chinese). [31] 屈高敏. 对地攻击型无人机作战效能评估与软件开发[D]. 南昌: 南昌航空大学, 2015.QU G M. The research of UCAV effectiveness assessment and software development[D]. Nanchang: Nanchang Hangkong University, 2015(in Chinese). [32] 闫云斌, 田庆民, 王永川, 等. 无人机数据链系统抗干扰性能评估指标及其测试方法[J]. 计算机测量与控制, 2015, 23(12): 3925-3928.YAN Y B, TIAN Q M, WANG Y C, et al. Evaluation indicator and test method of anti-jamming evaluation indicator for unmanned vehicle data link[J]. Computer Measurement & Control, 2015, 23(12): 3925-3928(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 650
- HTML全文浏览量: 44
- PDF下载量: 18
- 被引次数: 0
