



Research on turning directional stability of taxiing with changing speed for high-speed UAV
-
摘要:
高速起降无人机地面滑跑过程中受到轮胎力、气动力、舵面力等多个非线性因素的影响,容易发生转弯失控,在地面打转甚至冲出跑道等严重事故。目前利用分岔理论分析飞机地面滑跑非线性转弯系统稳定性时,都是基于匀速滑跑的平衡态系统,无法分析加减速对非线性非自治飞机地面滑跑系统稳定性的影响。对此,提出利用达朗贝尔原理将非线性动态系统转化为等效非线性平衡态系统进行分岔特性研究。在MATLAB/Simulink中建立无人机非线性地面变速滑跑动力学模型,并基于达朗贝尔原理在系统模型中引入惯性力,将系统转化为等效平衡态系统,进而利用数值延拓法对系统全局稳定性及分岔特性进行求解,分析了无人机变速滑跑过程中加速度对无人机转弯方向稳定性的影响,并对系统出现的鞍结分岔现象、Hopf分岔现象进行分析。通过对3种典型工况下无人机的运动状态和受力进行分析,揭示了无人机地面变速滑跑转弯时发生方向失稳的本质与机理。同时,在加速度单参数分岔分析的基础上,采用开折方法,将前轮转角作为附加参数引入无人机地面滑跑动力学模型,进行双参数分岔分析,讨论了双参数组合对无人机地面滑跑方向稳定性的影响规律,并就双参数分岔过程中新出现的BT分岔、GH分岔和ZH分岔现象进行了讨论。
-
关键词:
- 高速无人机 /
- 地面滑跑 /
- 分岔理论 /
- MATLAB/Simulink /
- 达朗贝尔原理
Abstract:High-speed UAV is prone to spin out of control, veer off the runway, and other major incidents because of the influence of numerous nonlinear elements such tire forces, aerodynamic forces, and rudder surface forces during the ground taxiing process. At present, the bifurcation is used to analyze the stability of aircraft ground taxiing nonlinear turning system, which is based on the equilibrium system of constant speed taxiing system. And it is impossible to analyze the influence of acceleration and deceleration on the stability of nonlinear non-autonomous aircraft ground taxiing systems by this theory. Thus, the D’Alembert principle is used to transform the nonlinear dynamic system into an equivalent nonlinear equilibrium system to study the bifurcation characteristics. To convert the system into an analogous equilibrium system, inertia force is incorporated into the system model based on the D’Alembert principle, and the nonlinear ground variable speed taxiing dynamics model of the UAV is built in MATLAB/Simulink. Then the global stability and bifurcation characteristics of the system are solved by the numerical continuation method, and the effect of acceleration on the stability of the turning direction is analyzed, and the saddle-node bifurcation and Hopf bifurcation in the system are analyzed. The motion states and forces of the UAV under three typical operating conditions are also analyzed, and the nature and mechanism of the directional instability of the UAV during the turning of ground variable speed sliding are revealed. Finally, based on the single-parameter bifurcation analysis of acceleration, the front wheel steering angle is introduced as an additional parameter into the UAV ground taxiing dynamic model by using the open folding method, and the dual-parameter bifurcation analysis is carried out to discuss the influence of two parameters on the stability of ground taxiing direction. And the phenomena of BT bifurcation, GH bifurcation, and ZH bifurcation on the stability of the ground taxiing direction of UAV is discussed.
-
Key words:
- high-speed UAV /
- ground taxiing /
- bifurcation theory /
- MATLAB/Simulink /
- D'Alembert's principle
-

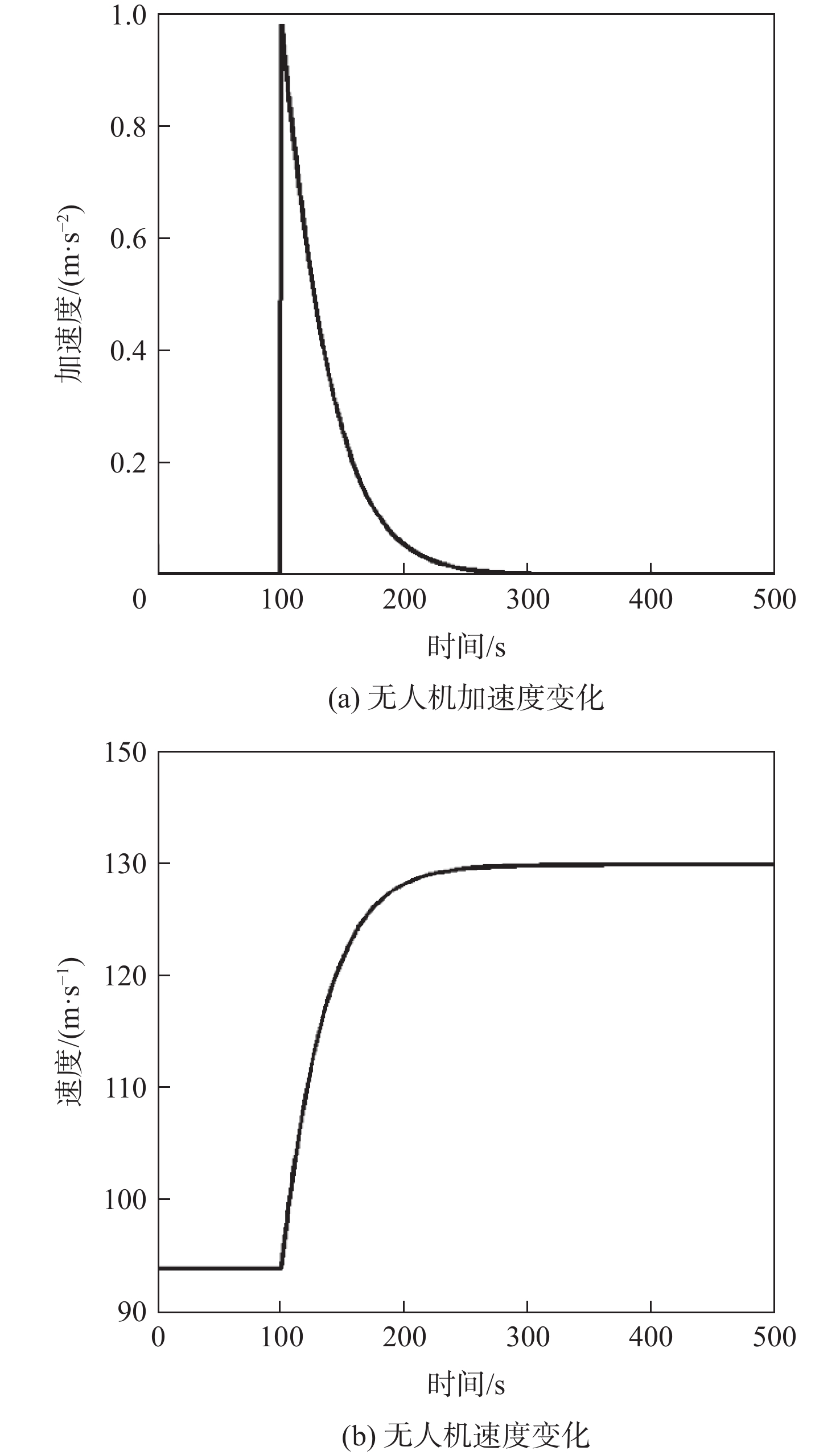
图 2 施加0.1g加速度后无人机直线滑跑运动状态变化
Figure 2. Changes in state of UAV linear taxiing motion state after 0.1g acceleration is applied

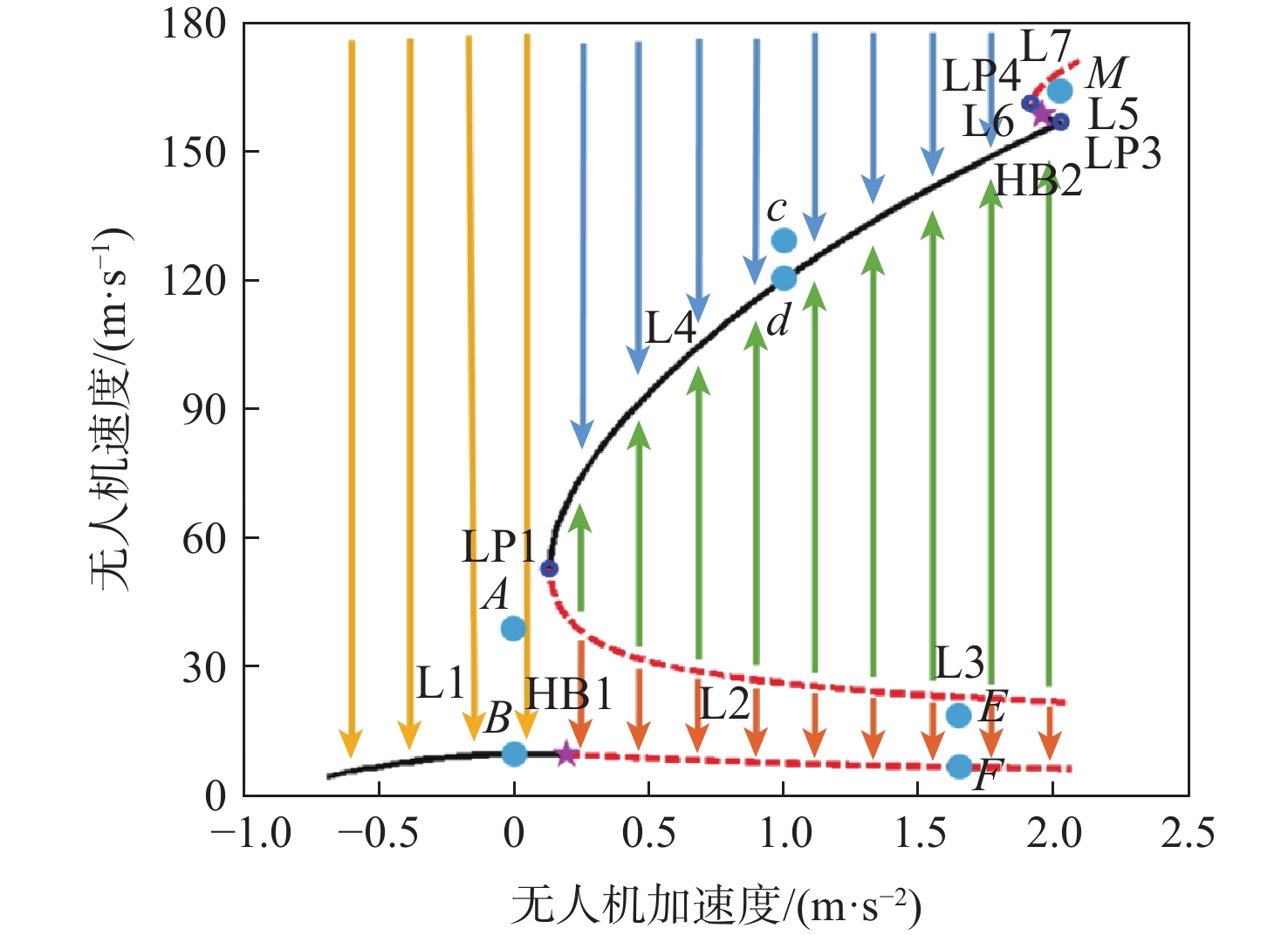
图 3 ${\theta _{\rm{l}}} = 0.7\;{{\rm{rad}}}$时的加速度单参数分岔曲线
Figure 3. Bifurcation curve of acceleration single-parameter when ${\theta _{\rm{l}}} = 0.7\;{{\rm{rad}}}$
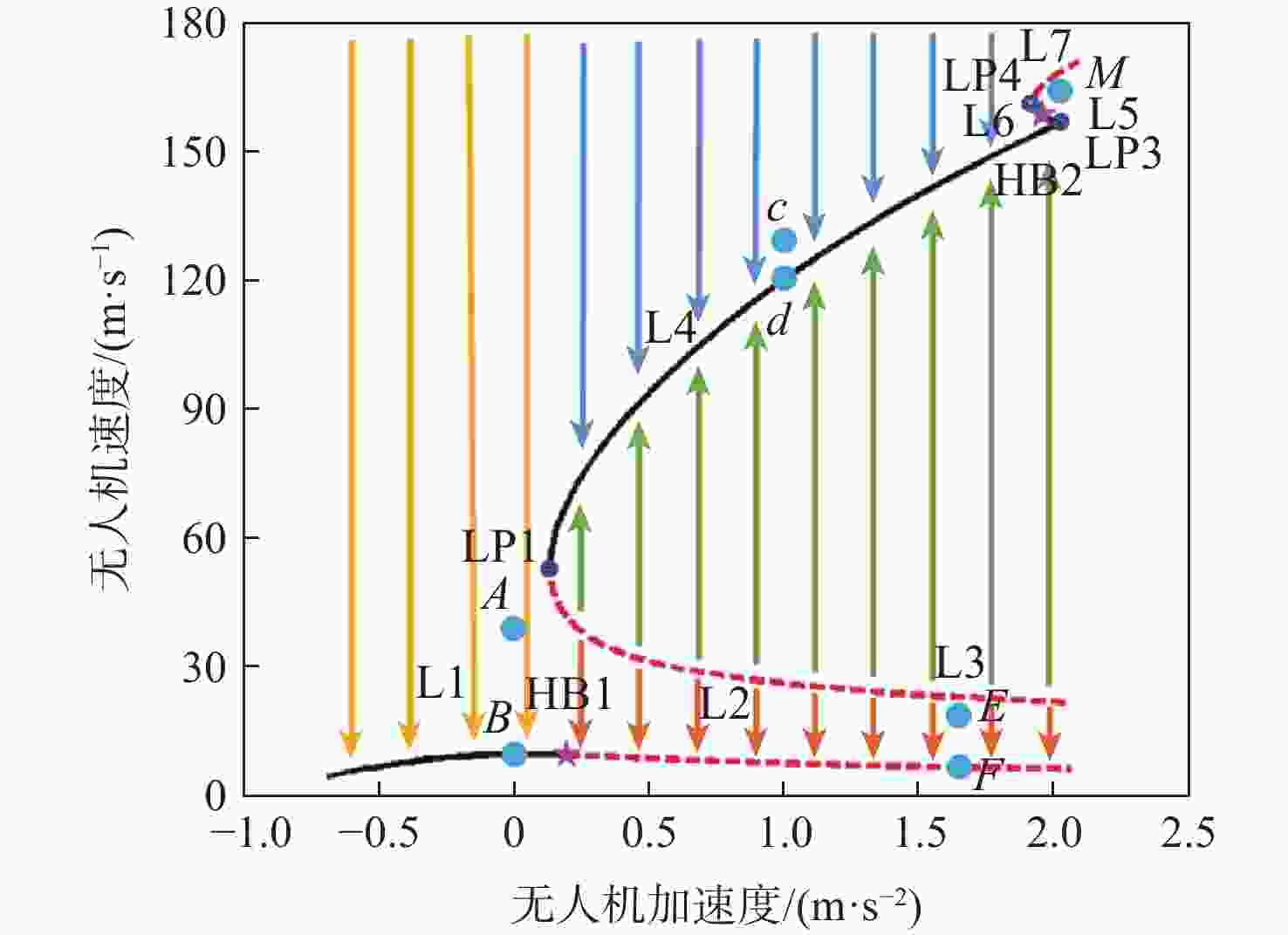
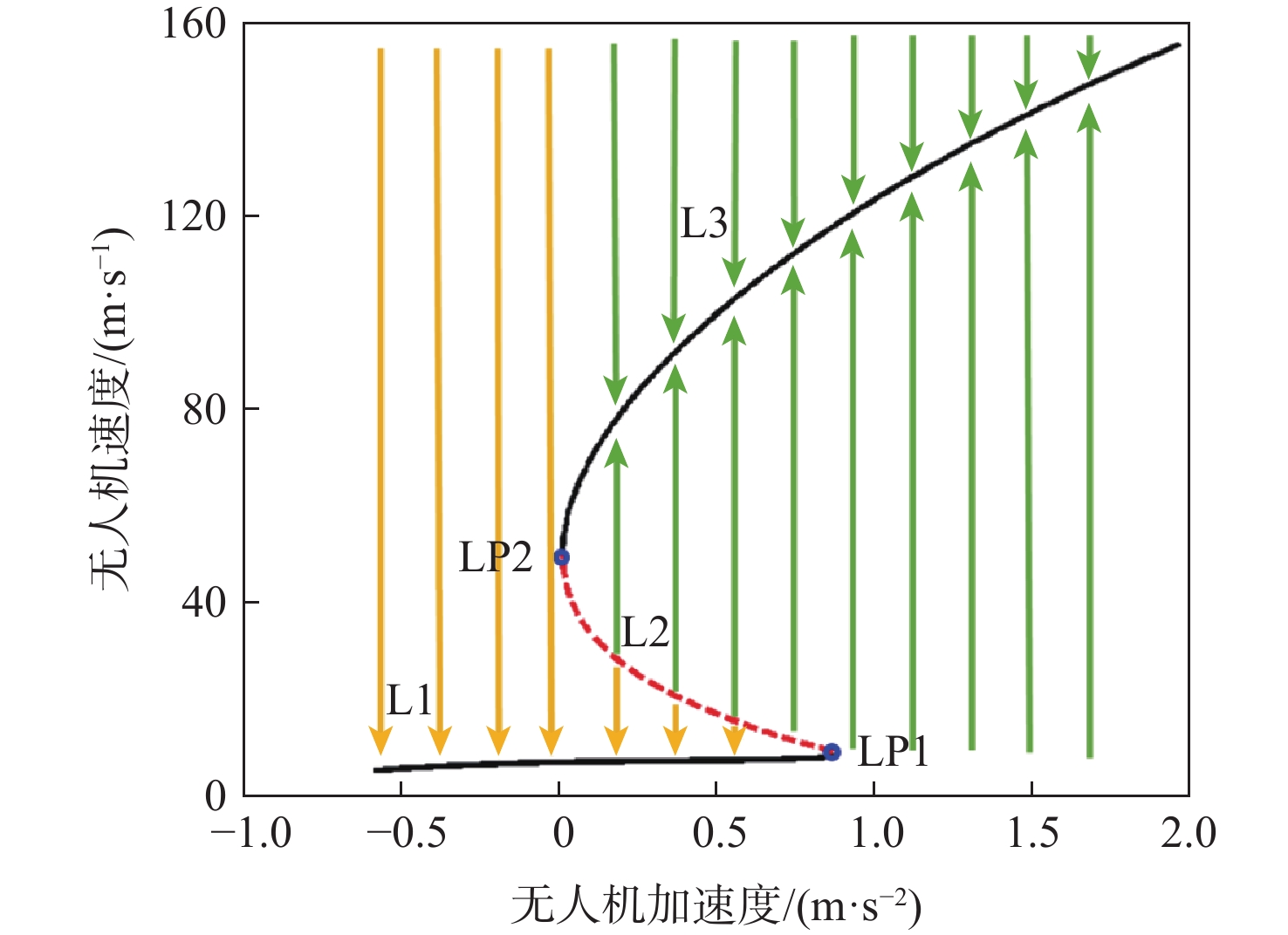
图 4 ${\theta _{\rm{l}}} = 0.5\;{{\rm{rad}}}$时的加速度单参数分岔曲线
Figure 4. Bifurcation curve of acceleration single-parameter when ${\theta _{\rm{l}}} = 0.5\;{{\rm{rad}}}$
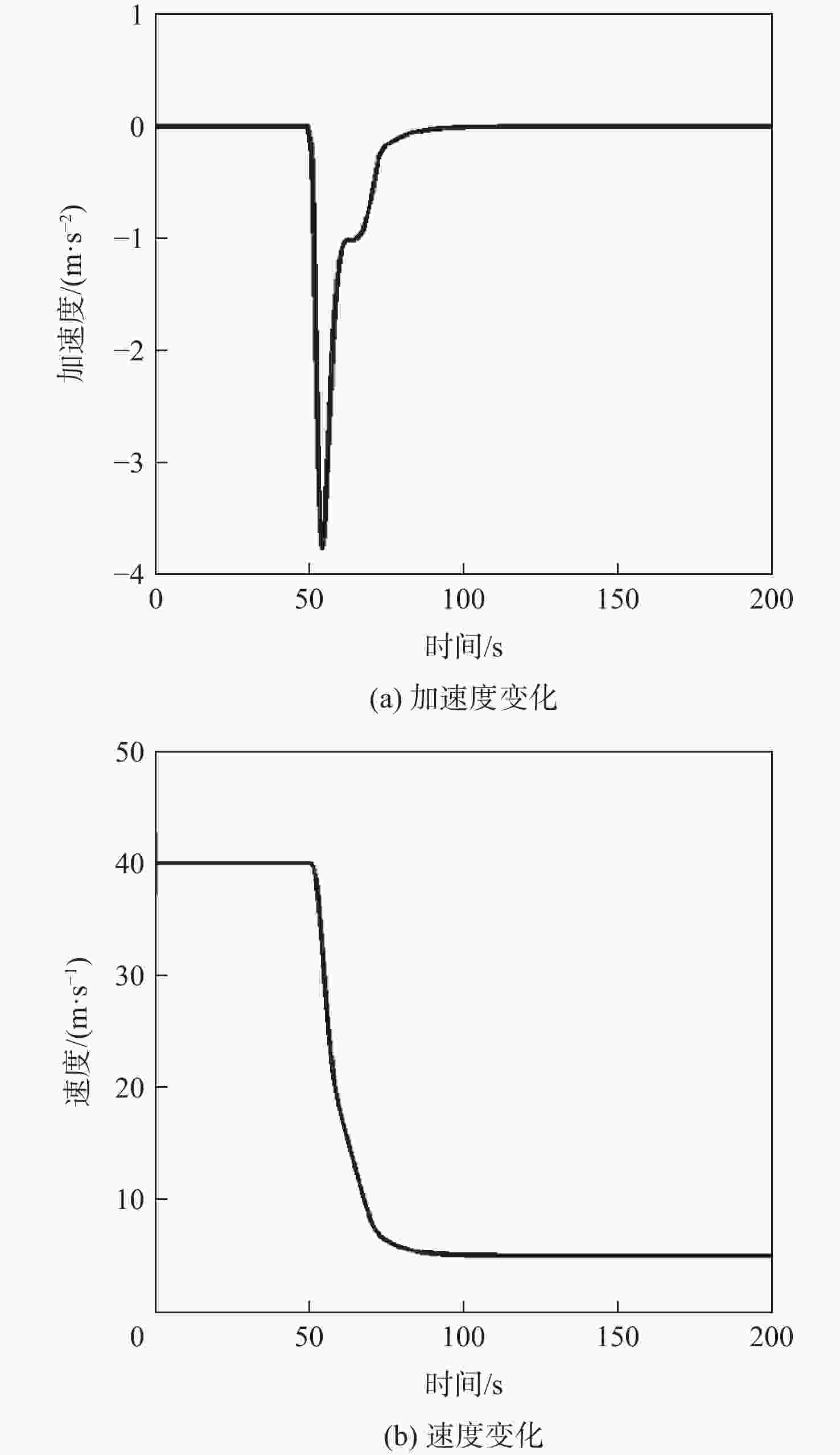
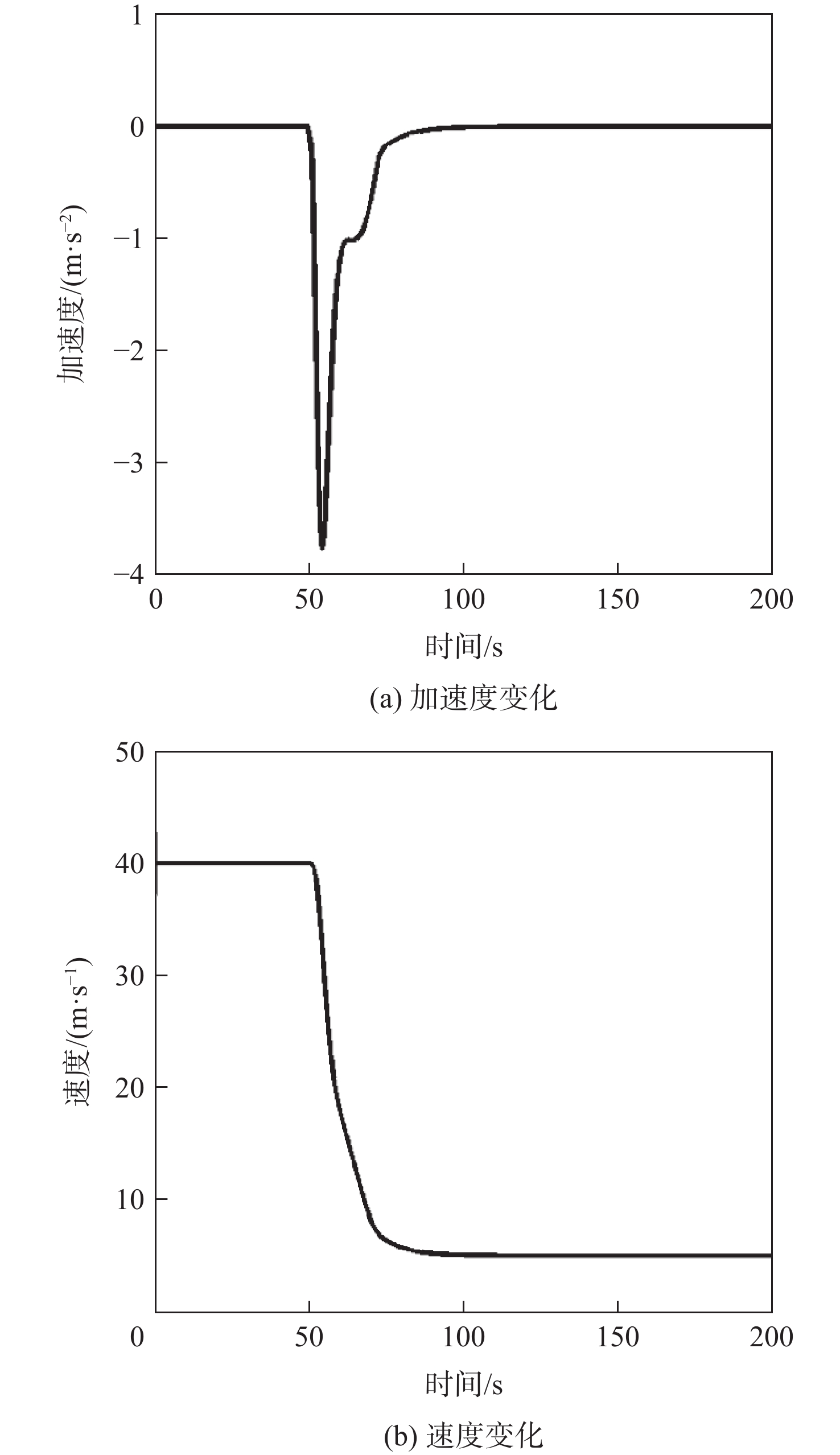
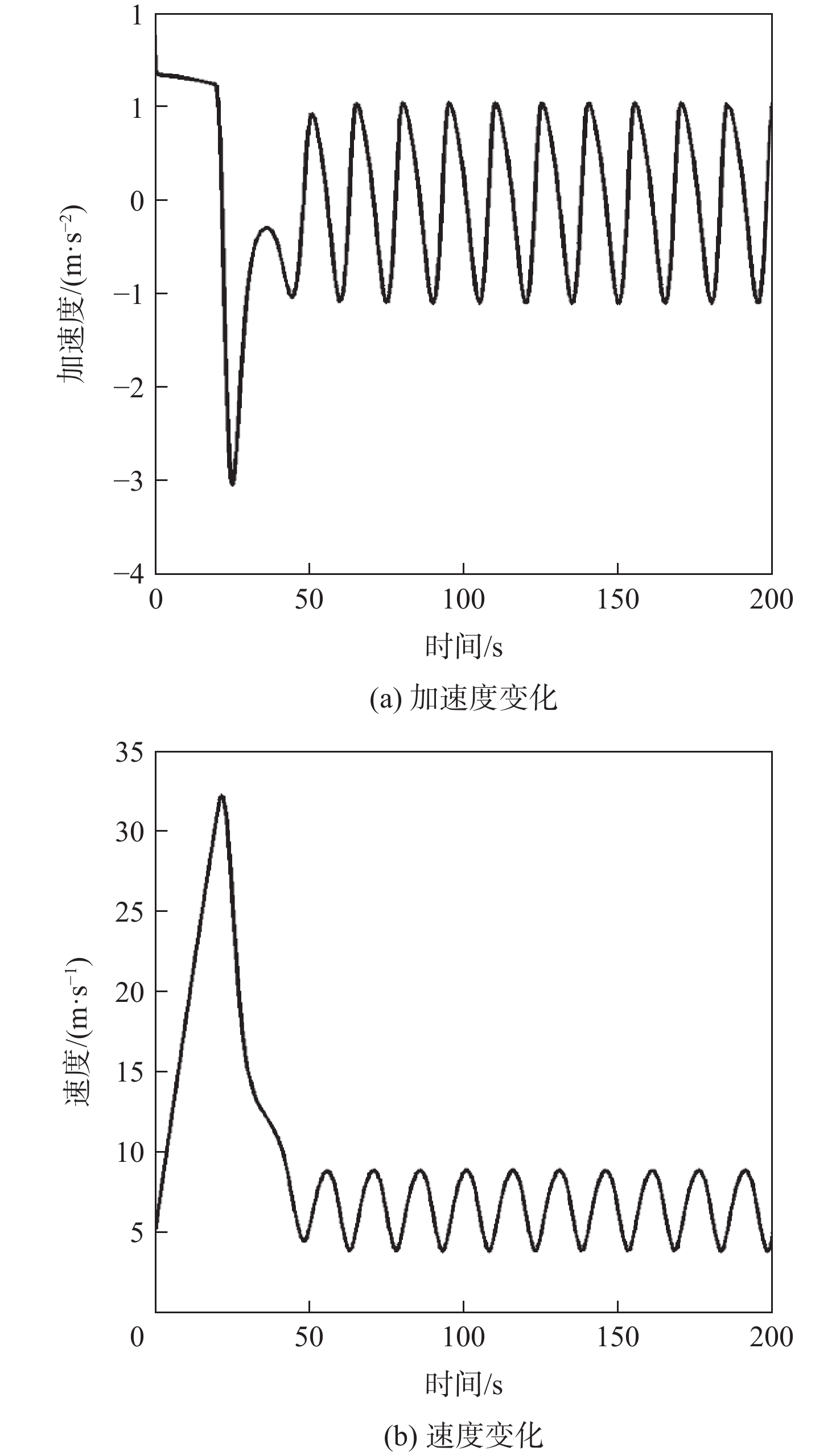
图 5 无人机小半径转弯时的加速度及速度变化曲线
Figure 5. Velocity and acceleration change curves of UAV in small radius turning

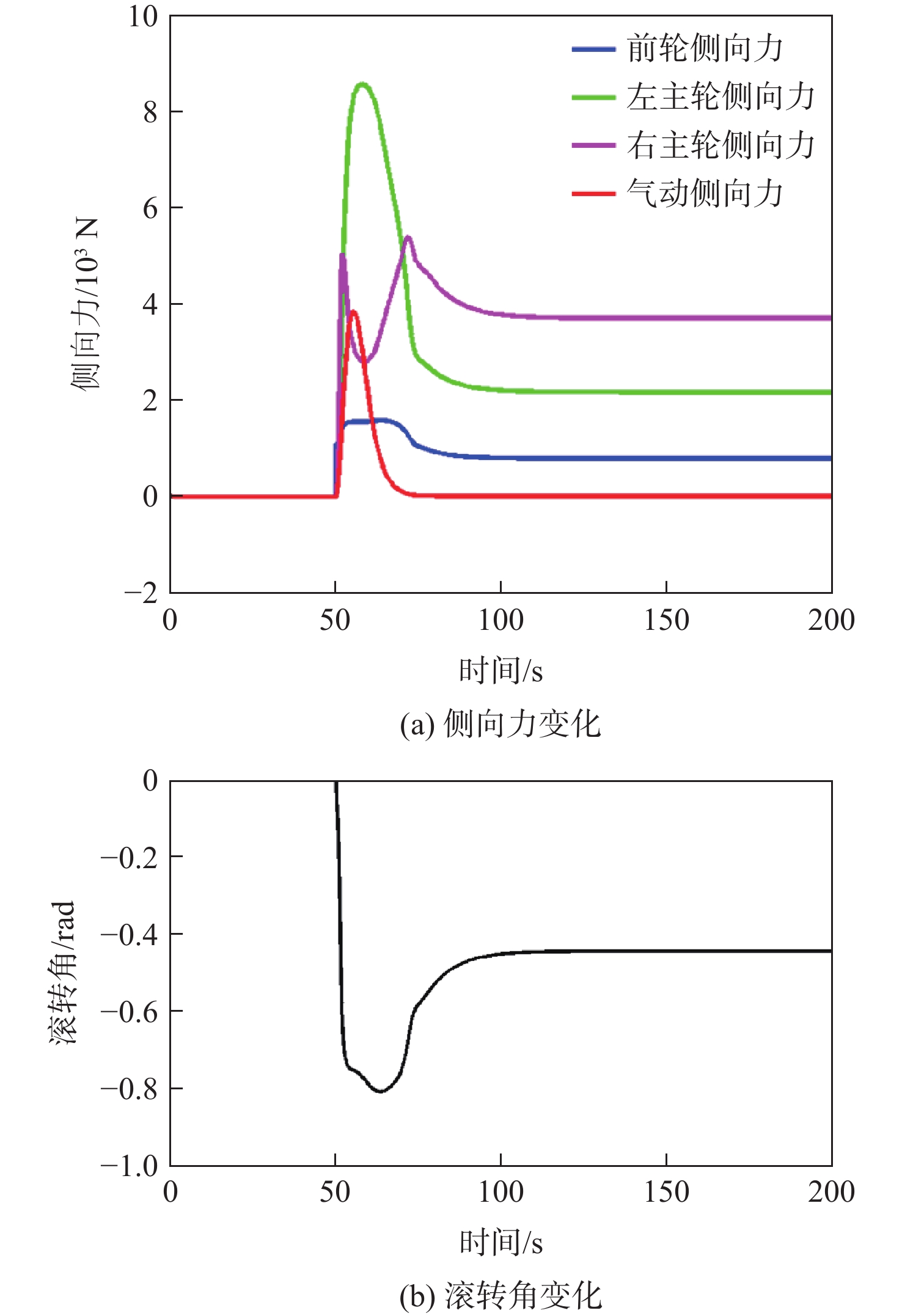
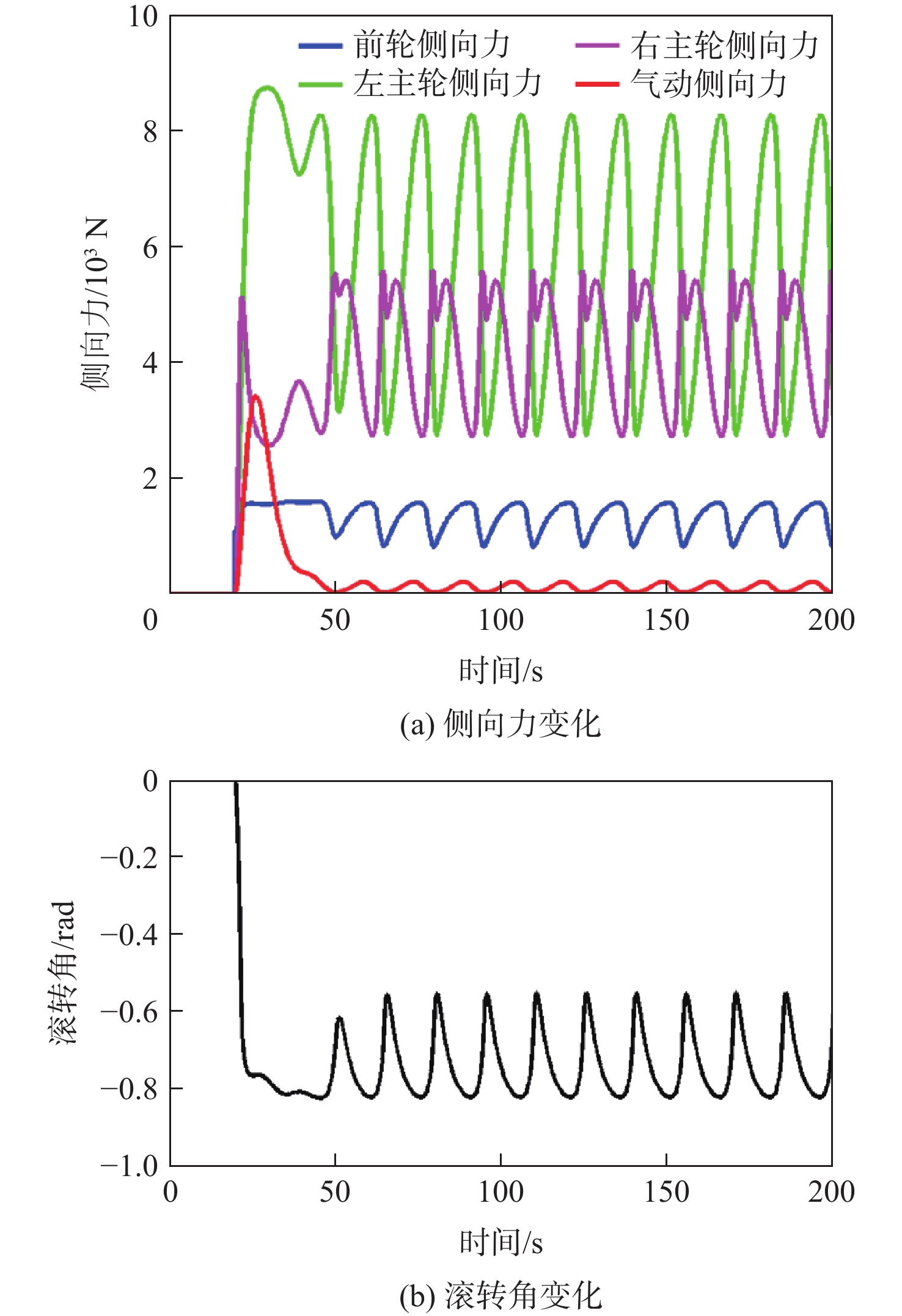
图 6 无人机小半径转弯时的侧向力及滚转角变化曲线
Figure 6. Lateral force and roll angle change curves of UAV in small radius turning

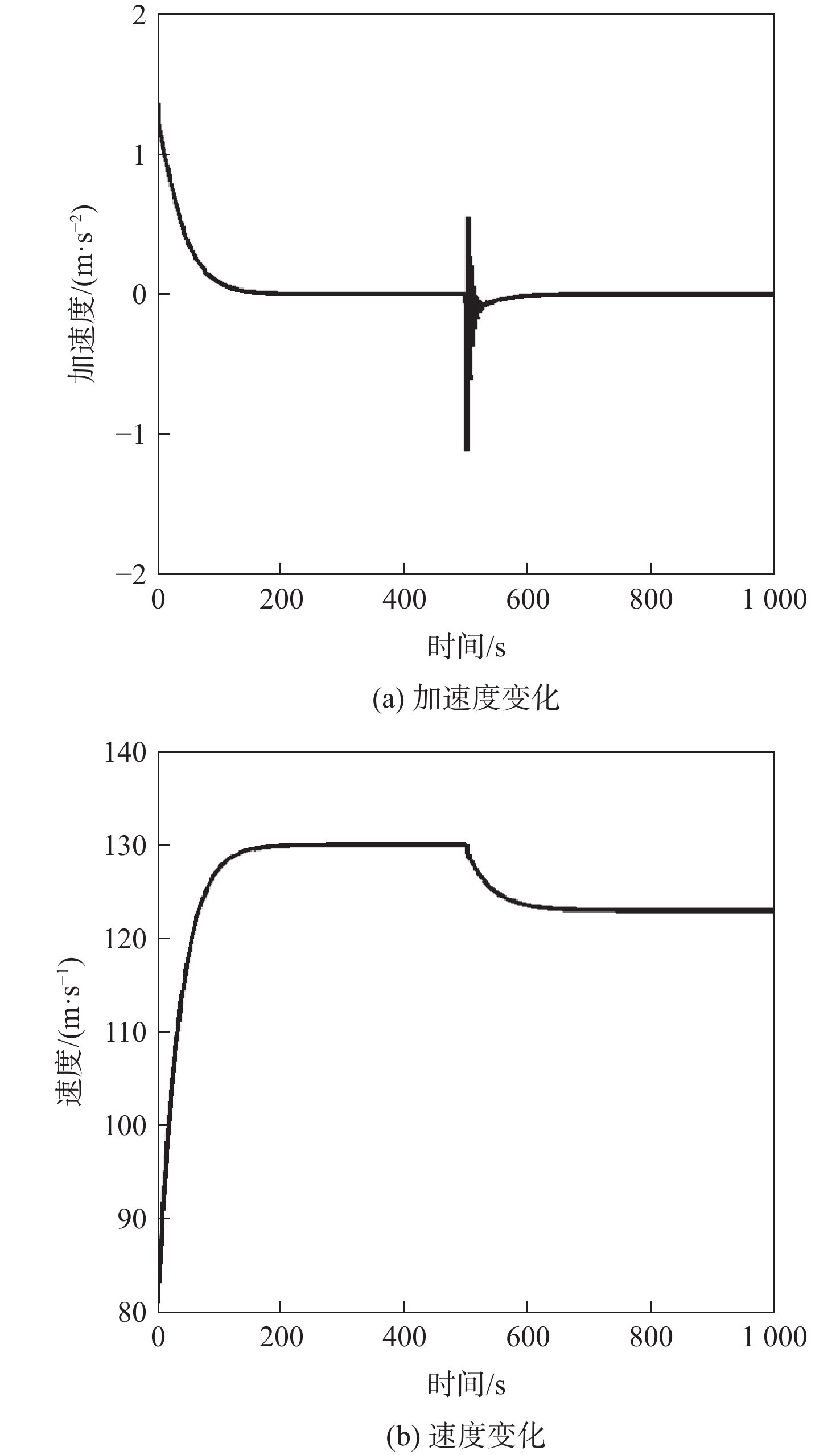
图 7 无人机大半径转弯时的速度及加速度变化曲线
Figure 7. Velocity and acceleration change curves of UAV in large radius turning
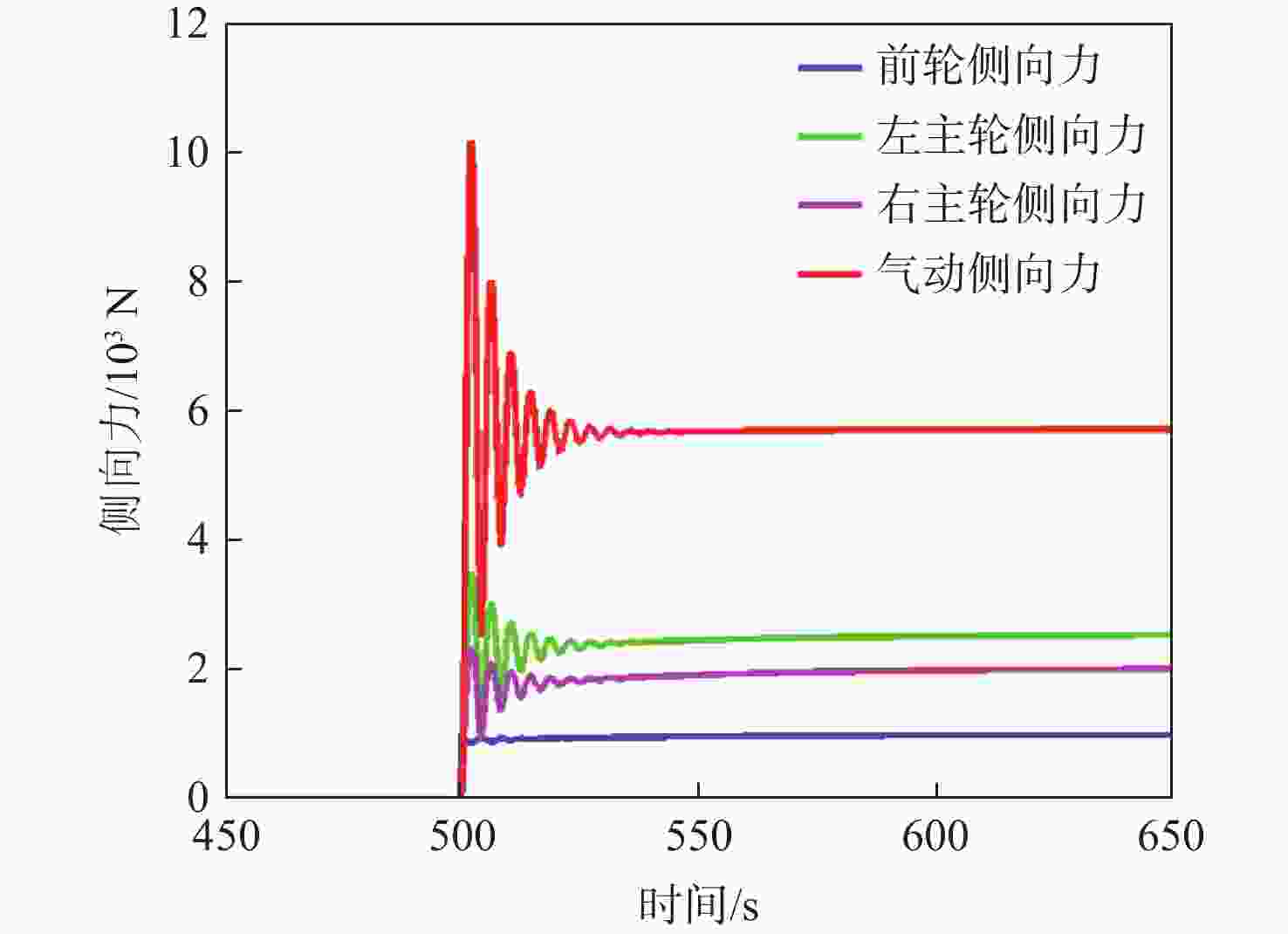
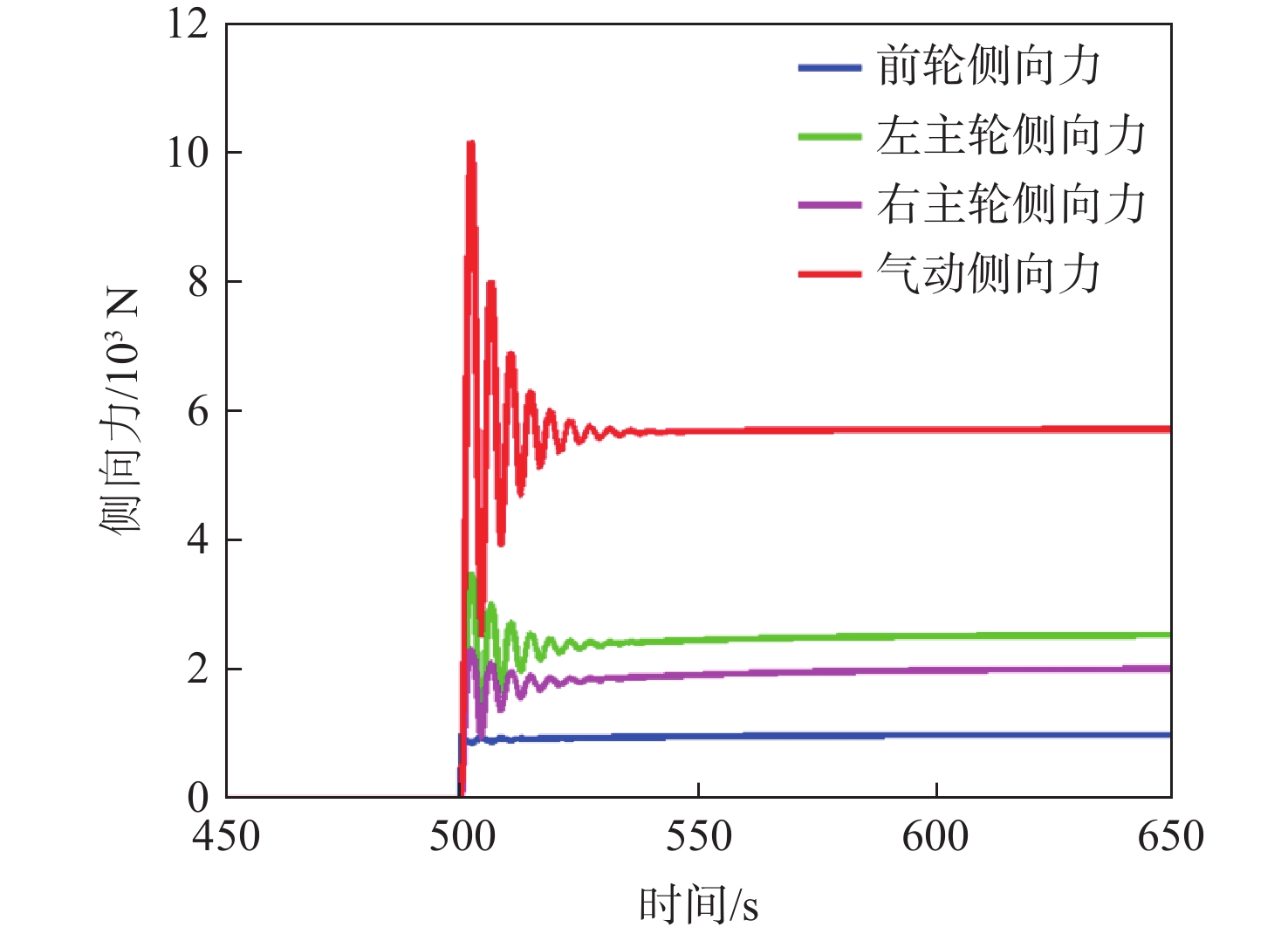
图 8 无人机大半径转弯时的侧向力变化曲线
Figure 8. Lateral force change curves of UAV in large radius turning
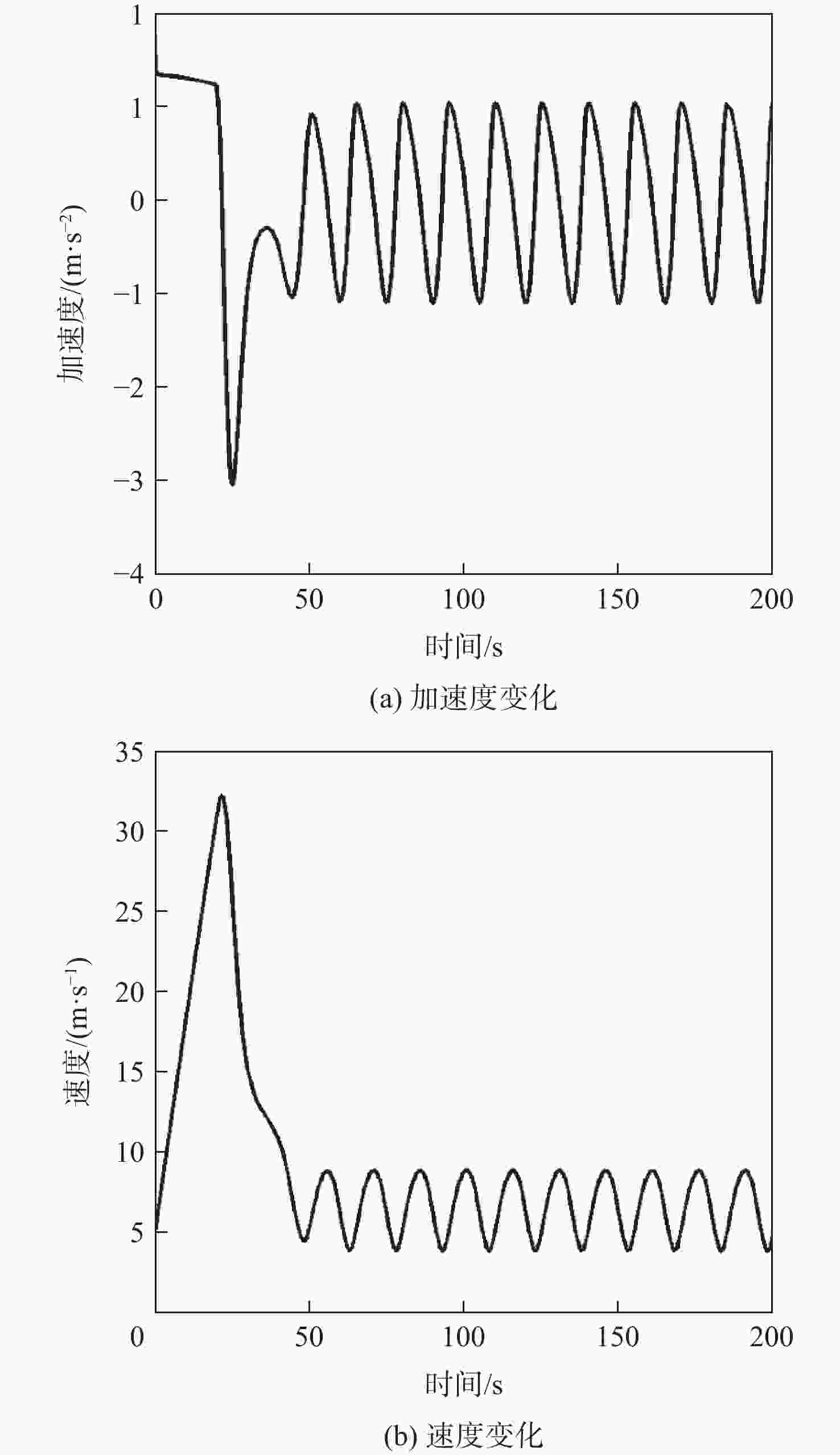
图 9 无人机不稳定周期性转弯时的速度及加速度变化曲线
Figure 9. Velocity and acceleration change curves of UAV in unstable periodic turning

图 10 无人机不稳定转弯时的侧向力和滚转角变化曲线
Figure 10. Lateral force and roll angle change curves on UAV in unstable periodic turning
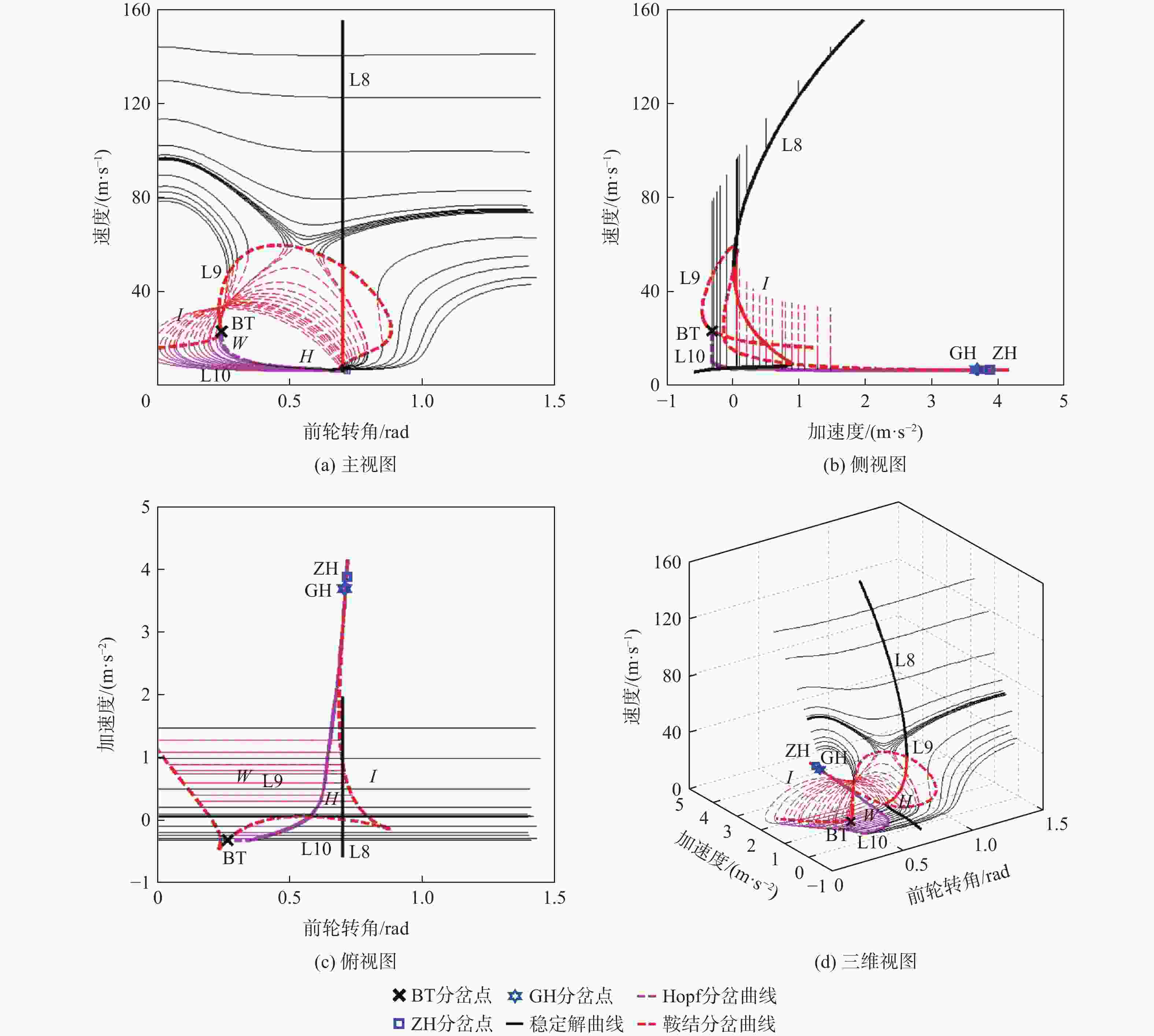
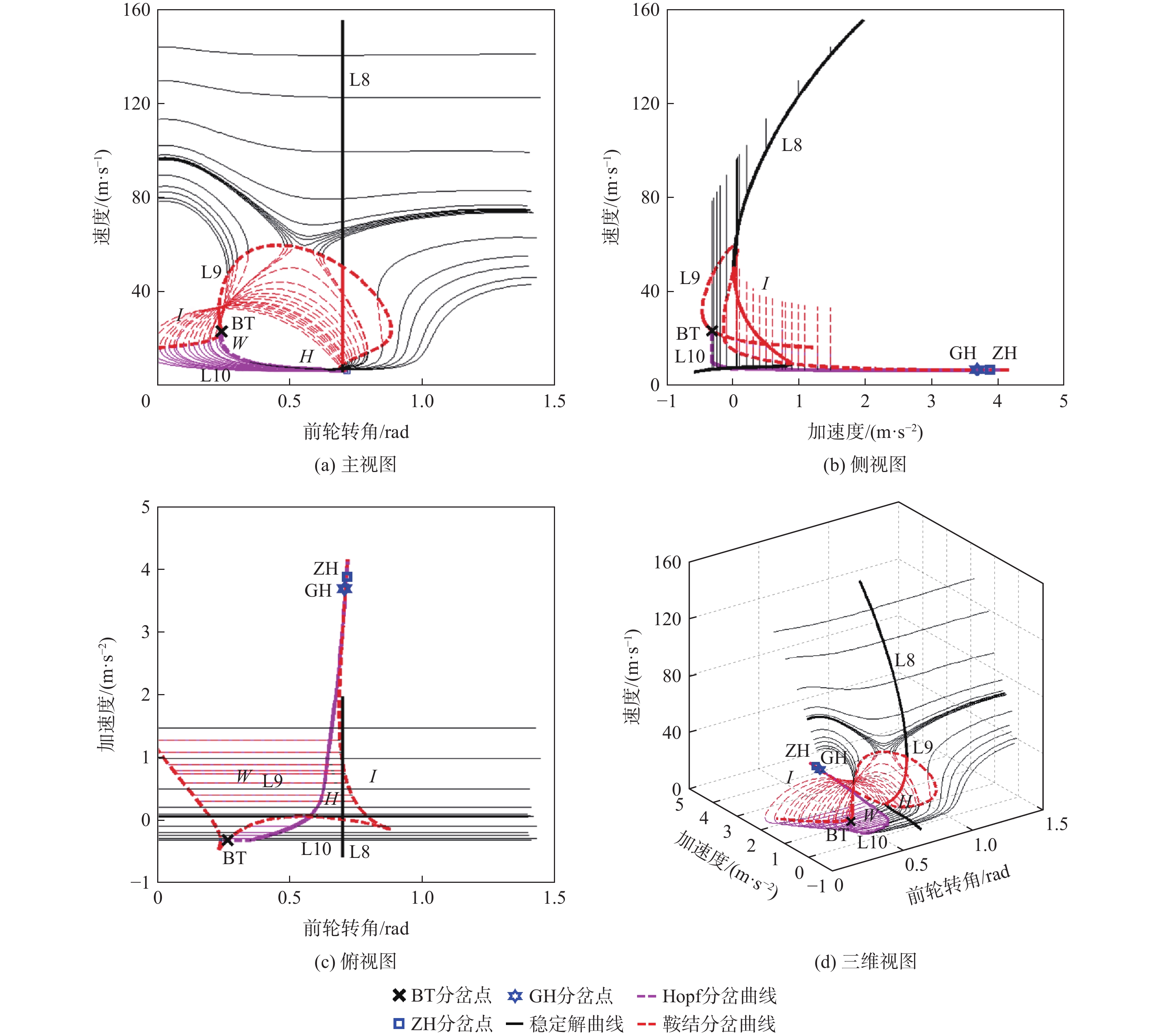
图 11 加速度—前轮转角双参数分岔曲线
Figure 11. Dual-parameter bifurcation curves under the effect of UAV acceleration and nose wheel steering angle
表 1 无人机转弯滑跑模型参数
Table 1. Parameter of UAV taxiing model
参数名称 数值 无人机机体质量 ${m/ \mathord{ {\vphantom {m { { {\rm{kg} } } } } } } { { {\rm{kg} } } } }$ 3700 无人机绕x轴的转动惯量 ${ { {I_x} } \mathord{/ {\vphantom { { {I_x} } { { {\rm{kg} } } \cdot { {\rm{m} }^2} } } } } { { ({\rm{kg} } } \cdot { {\rm{m} }^2} }) }$ 2400 无人机绕y轴的转动惯量 ${ { {I_y} } \mathord{/ {\vphantom { { {I_y} } { {kg} \cdot {m^2} } } } } { { ({\rm{kg} } } \cdot { {\rm{m} }^2} }) }$ 18710 无人机绕z轴的转动惯量 ${ { {I_z} } \mathord{/ {\vphantom { { {I_{\textit{z} } } } { {kg} \cdot {m^2} } } } } { {( {\rm{kg} } } \cdot { {\rm{m} }^2} }) }$ 18220 机翼展长 ${ { {l_{\rm{b} } } } \mathord{/ {\vphantom { { {l_{\rm{b} } } } {\rm{m} } } } } {\rm{m} } }$ 4.5 主轮距 ${ { {b_{\rm{w} } } } \mathord{/ {\vphantom { { {b_{\rm{w} } } } {\rm{m} } } } } {\rm{m} } }$ 1.75 方向舵面积 ${ { {S_{\rm{r} } } } \mathord{/ {\vphantom { { {S_r} } { {m^2} } } } } { { {\rm{m} }^2} } }$ 0.8 升降舵面积 ${ { {S_{\rm{t} } } } \mathord{/ {\vphantom { { {S_t} } { {m^2} } } } } { { {\rm{m} }^2} } }$ 0.65 气动中心到质心在${O_{\rm{b} } }{x_{\rm{b} } }$上投影距离${ { {x_{\rm{a}}} } \mathord{\left/ {\vphantom { { {x_a} } m} } \right. } {\rm{m} } }$ 0.2 气动中心到质心在${O_{\rm{b} } }{y_{\rm{b} } }$上投影距离${ { {{\textit{z}}_{\rm{a} } } } \mathord{\left/ {\vphantom { { {z_a} } m} } \right. } {\rm{m} } }$ 0.3 推力作用点到质心在${O_{\rm{b} } }{y_{\rm{b} } }$上投影距离${ { {{\textit{z}}_{\rm{T} } } } \mathord{\left/ {\vphantom { { {z_T} } m} } \right. } {\rm{m} } }$ 0.4 方向舵平均气动弦长${ { {l_{\rm{r}}} } \mathord{\left/ {\vphantom { { {l_r} } m} } \right. } {\rm{m}}}$ 1 前轮垂向刚度${ { {k_{\rm{n} } } } \mathord{/ {\vphantom { { {k_{\rm{n} } } } {({ {\rm{N} } } { {\cdot} }{ {\rm{m} }^{ {\text{ - } }1} })} } } \ } {({ {\rm{N} } } { {\cdot} }{ {\rm{m} }^{ { { - } }1} })} }$ 85000 前轮垂向阻尼${ { {c_{ {\textit{z} }{\rm{n} } } } } \mathord{/ {\vphantom { { {c_{zn} } } {({N} \cdot s \cdot {m^{ {\text{ - } }1} })} } } } {({ {\rm{N} } } \cdot {\rm{s} } \cdot { {\rm{m} }^{ { { - } }1} })} }$ 30000 主轮垂向刚度${ { {k_{\rm{m} } } }/{({ {\rm{N} } } { {\cdot} }{ {\rm{m} }^{ {{ - } }1} })} }$ 850000 主轮垂向阻尼${ { {c_{ {\textit{z} }{\rm{m} } } } } \mathord{/ {\vphantom { { {c_{ {\textit{z} }{\rm{m} } } } } {({N} \cdot s \cdot {m^{ {\text{ - } }1} })} } } } {({ {\rm{N} } } \cdot {\rm{s} } \cdot { {\rm{m} }^{ { { - } }1} })} }$ 75000 左侧发动机最大推力${ { { {F }_{ {\rm{TL} } } } } \mathord{\left/ {\vphantom { { {F_{TL} } } N} } \right. } {\rm{N} } }$ 2700 右侧发动机最大推力${ { { {F }_{ {\rm{TR} } } } } \mathord{\left/ {\vphantom { { {F_{TR} } } N} } \right. } {\rm{N} } }$ 2700  下载: 导出CSV
下载: 导出CSV
-
[1] 王勇, 王英勋. 无人机滑跑纠偏控制[J]. 航空学报, 2008, 29(S1): 142-149.WANG Y, WANG Y X. Lateral deviation correction control for UAV taxiing[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(S1): 142-149(in Chinese). [2] LI Y, JIAO Z X, SHANG Y X. Research on aircraft taxiing lateral control based on fuzzy controller[C]// Proceedings of 2011 International Conference on Fluid Power and Mechatronics. Piscataway: IEEE Press, 2011: 582-587. [3] DEL CARRE A, PALACIOS R. Simulation and optimization of takeoff maneuvers of very flexible aircraft[J]. Journal of Aircraft, 2020, 57(6): 1097-1110. doi: 10.2514/1.C035901 [4] XU F, REN X Q, ZHANG X P, et al. Decreasing effectiveness of chine tire on contaminated runway at high taxiing speed[J]. Journal of Aircraft, 2020, 57(2): 198-208. doi: 10.2514/1.C035293 [5] 苏光旭, 张登成, 张艳华, 等. 舵面偏转对飞机着陆滑跑性能影响研究[J]. 飞行力学, 2020, 38(4): 1-6. doi: 10.13645/j.cnki.f.d.20200312.003SU G X, ZHANG D C, ZHANG Y H, et al. Study of the influence of rudder deflection on aircraft landing and running performance[J]. Flight Dynamics, 2020, 38(4): 1-6(in Chinese). doi: 10.13645/j.cnki.f.d.20200312.003 [6] 范大旭, 李秀娟, 李春涛, 等. 大展弦比无人机地面滑跑动力学建模与分析[J]. 兵工自动化, 2018, 37(10): 70-76. doi: 10.7690/bgzdh.2018.10.015FAN D X, LI X J, LI C T, et al. Modeling and analysis of ground dynamics of high aspect ratio UAV[J]. Ordnance Industry Automation, 2018, 37(10): 70-76(in Chinese). doi: 10.7690/bgzdh.2018.10.015 [7] SONG L, YANG H, YAN X F, et al. A study of instability in a miniature flying-wing aircraft in high-speed taxi[J]. Chinese Journal of Aeronautics, 2015, 28(3): 749-756. doi: 10.1016/j.cja.2015.04.001 [8] DONG H, LI D C, XIANG J W, et al. Longitudinal short period flight quality analysis of flexible aircraft[C]//Proceedings of 2016 IEEE Chinese Guidance, Navigation and Control Conference. Piscataway: IEEE Press, 2016: 2903-2907. [9] KRAUSKOPF B, OSINGA H. Numerical continuation methods for dynamic systems[M]. Berlin: Springer, 2007: 18-22. [10] 许多生, 陆启韶. 飞机滚转时惯性耦合运动的分岔分析[J]. 航空学报, 2001, 22(2): 144-147. doi: 10.3321/j.issn:1000-6893.2001.02.003XU D S, LU Q S. Bifurcation analysis of inertia cross coupling in aircraft rolling[J]. Acta Aeronautica et Astronautica Sinica, 2001, 22(2): 144-147(in Chinese). doi: 10.3321/j.issn:1000-6893.2001.02.003 [11] YIN Y, NEILD S A, JIANG J Z, et al. Optimization of a main landing gear locking mechanism using bifurcation analysis[J]. Journal of Aircraft, 2017, 54(6): 2126-2139. doi: 10.2514/1.C034228 [12] 陈大伟, 顾宏斌, 刘晖. 起落架摆振主动控制分岔研究[J]. 振动与冲击, 2010, 29(7): 38-42. doi: 10.3969/j.issn.1000-3835.2010.07.009CHEN D W, GU H B, LIU H. Active control for landing gear shimmy with bifurcation theories[J]. Journal of Vibration and Shock, 2010, 29(7): 38-42(in Chinese). doi: 10.3969/j.issn.1000-3835.2010.07.009 [13] YIN Q Z, WEI X H, NIE H, et al. Parameter effects on high-speed UAV ground directional stability using bifurcation analysis[J]. Chinese Journal of Aeronautics, 2021, 34(11): 1-14. doi: 10.1016/j.cja.2020.10.030 [14] COETZEE E, KRAUSKOPF B, LOWENBERG M. Continuation analysis of aircraft ground loads during high-speed turns[J]. Journal of Aircraft, 2013, 50(1): 217-231. doi: 10.2514/1.C031883 [15] JIAO Z X, ZHANG H, SHANG Y X, et al. A power-by-wire aircraft brake system based on high-speed on-off valves[J]. Aerospace Science and Technology, 2020, 106: 106177. doi: 10.1016/j.ast.2020.106177 [16] RANKIN J, COETZEE E, KRAUSKOPF B, et al. Bifurcation and stability analysis of aircraft turning on the ground[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(2): 500-511. doi: 10.2514/1.37763 [17] HORIUCHI S, OKADA K, NOHTOMI S. Analysis of accelerating and braking stability using constrained bifurcation and continuation methods[J]. Vehicle System Dynamics, 2008, 46(S1): 585-597. doi: 10.1080/00423110802007779 [18] LIEBSCHER S. Bifurcation without parameters[M]. Berlin: Springer, 2015. [19] DE CARVALHO BRAGA D, MELLO L F, ROCŞOREANU C, et al. Control of planar bautin bifurcation[J]. Nonlinear Dynamics, 2010, 62(4): 989-1000. doi: 10.1007/s11071-010-9779-2 [20] LIEBSCHER S. Zero-hopf bifurcation[M]. Berlin: Springer, 2014: 103-108. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 758
- HTML全文浏览量: 47
- PDF下载量: 12
- 被引次数: 0
