



Distributed cooperative guidance strategy based on virtual negotiation and rolling horizon optimization
-
摘要:
针对目标机动条件下的多无人机协同制导问题,提出基于虚拟协商机制与滚动时域优化的分布式协同制导策略。为同时改善时间协调与导引控制效果,在滚动时域优化框架下设计局部协调变量与目标函数,构建有限时域内的多约束协同制导优化模型;为增强制导系统对机动目标的鲁棒性,设计基于非线性自回归神经网络的干扰观测器;针对无人机之间的控制输入耦合,提出虚拟协商机制,提出虚拟协商机制,实现同步决策、排除内部“分歧”,并利用Nesterov动量的均方根传播算法设计制导指令生成策略;分别进行数字仿真与半实物仿真实验。结果表明:所提策略可在线预测与优化,应对各类干扰,提升协同制导效果,并会在实际任务中得到进一步的应用与检验。
Abstract:The multi-UAV cooperative guidance under target maneuvering is studied, and a distributed cooperative guidance strategy based on virtual negotiation mechanism and rolling horizon optimization is proposed. To improve the effect of time coordination and guidance control at the same time, the local coordination variables and objective function are designed under the rolling horizon optimization framework. The multi-constraint cooperative guidance optimization model is then constructed in the finite time domain. To enhance the robustness of the guidance system to maneuvering targets, a disturbance observer based on nonlinear autoregressive neural network is designed. To address the control input coupling between UAVs, a virtual negotiation mechanism is proposed, realizing synchronous decision-making and eliminating internal “differences”. The guidance command generation strategy is also designed by using the root mean square propagation algorithm of Nesterov momentum. The experiments of digital simulation and hardware in the loop simulation are carried out. The results show that the proposed guidance strategy can deal with various system interferences and improve the effectiveness of the cooperative guidance through online prediction and optimization, thus expected to be further applied and tested in practical projects.
-

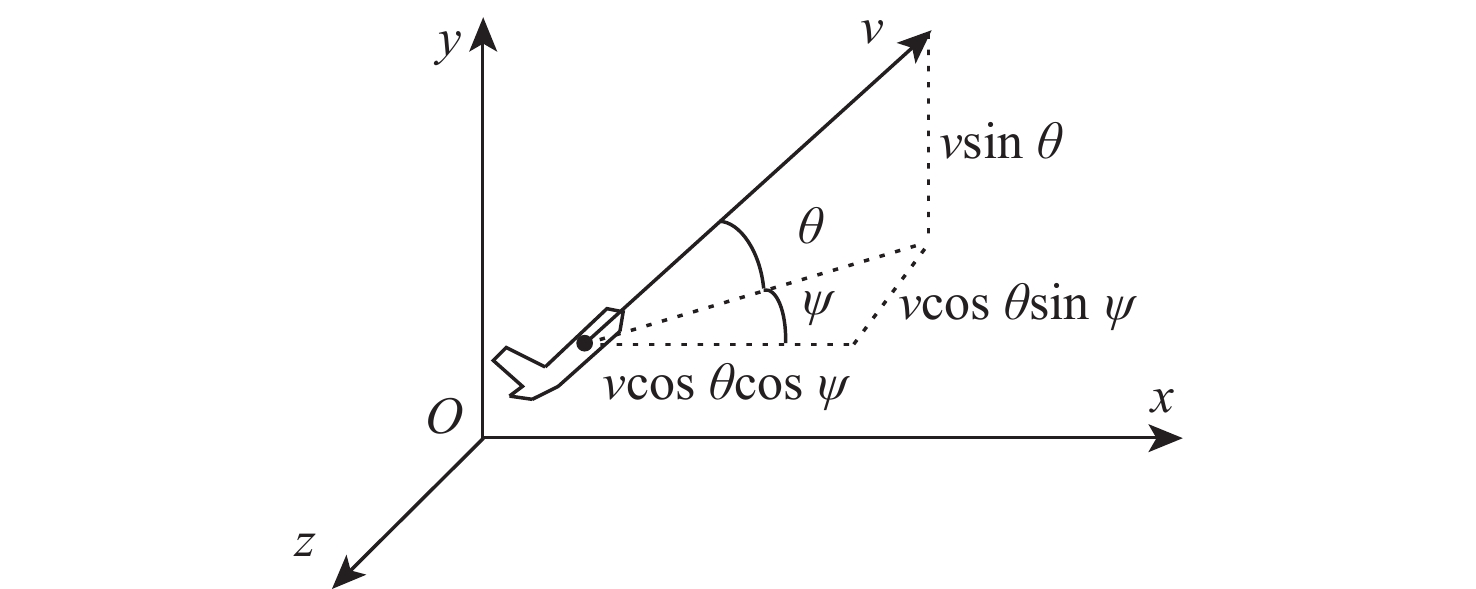
图 1 无人机i和目标的三维运动示意图
Figure 1. Three-dimensional motion diagram of ${\text{UA}}{{\text{V}}i}$ and target
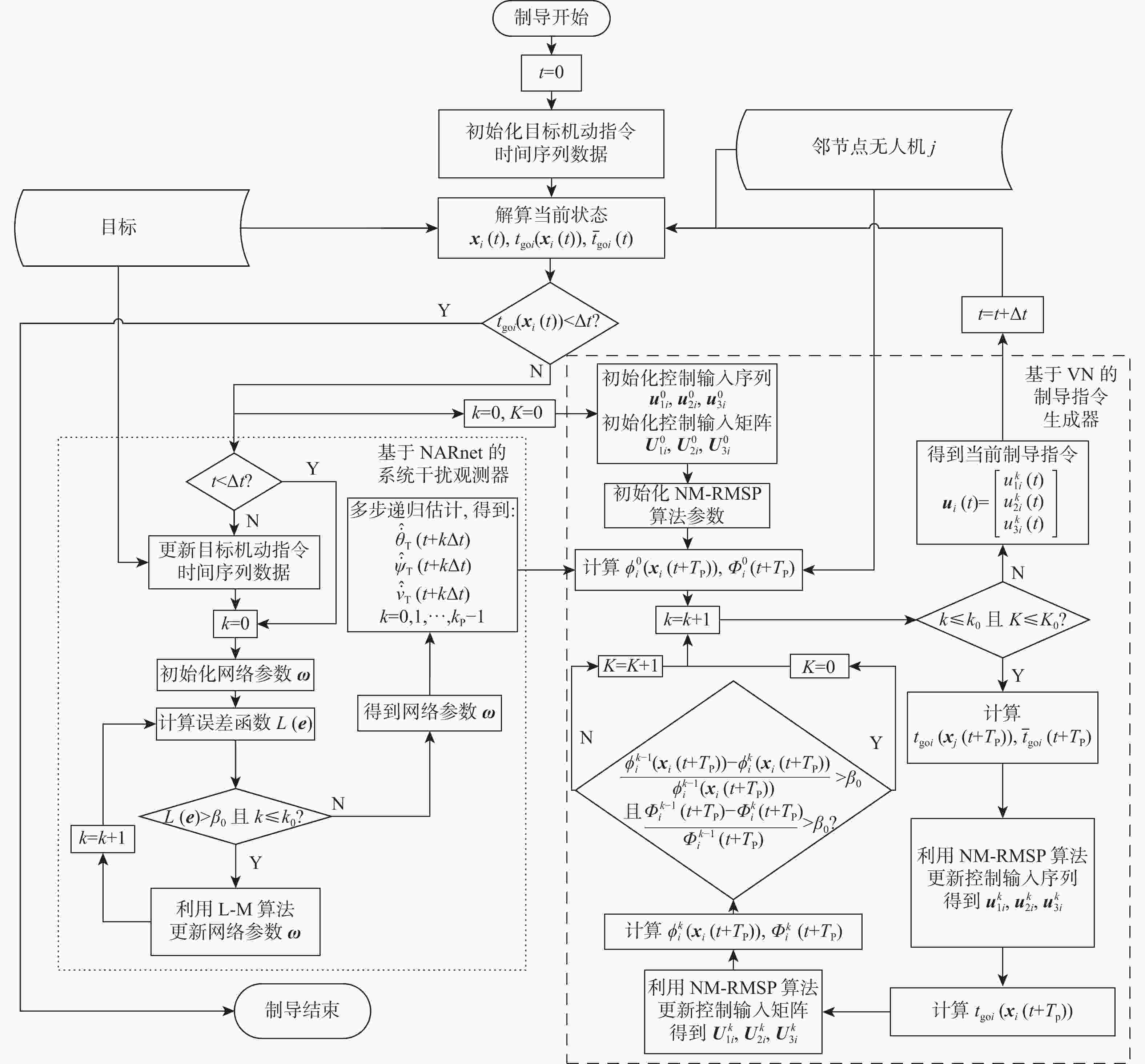
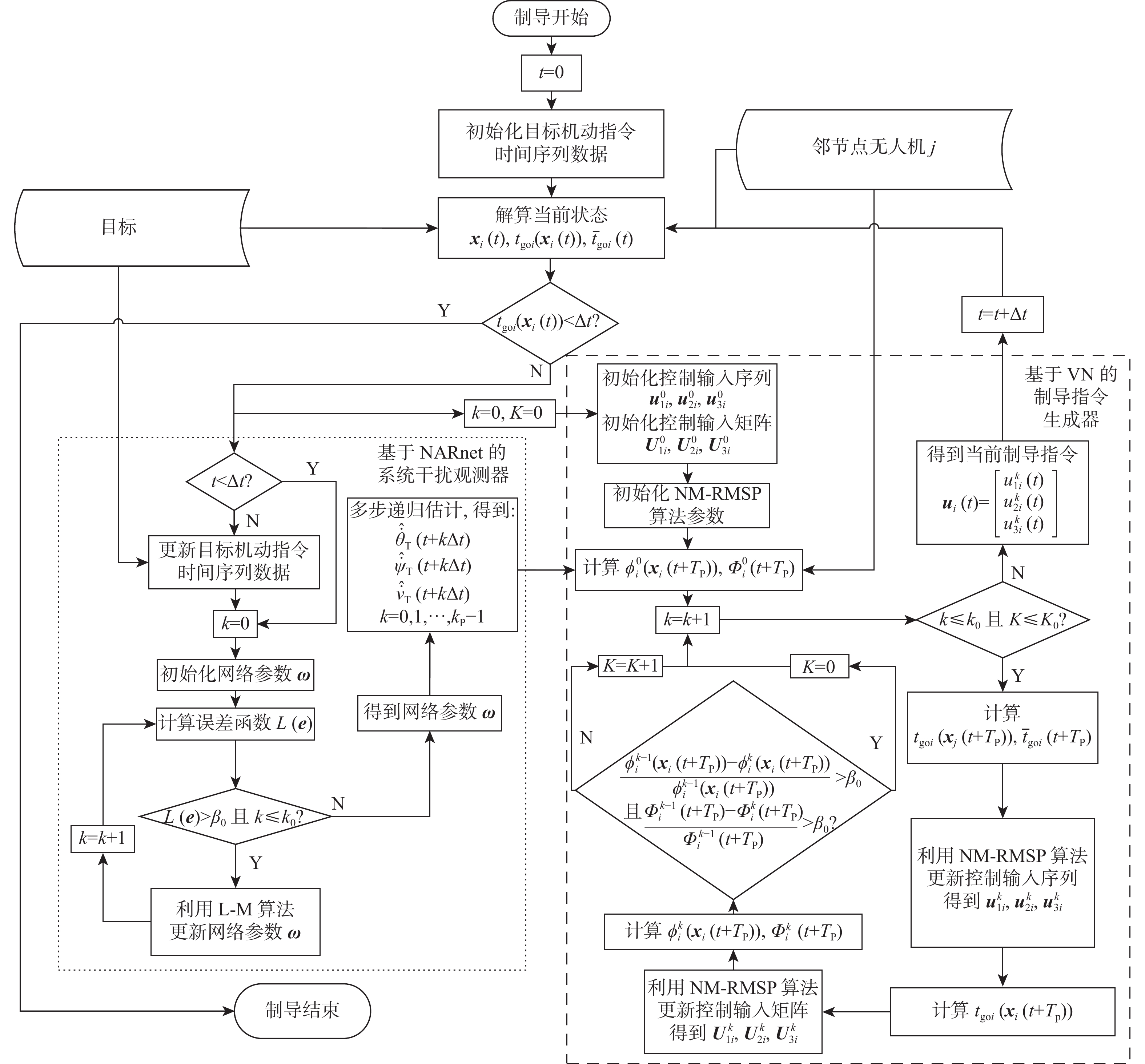
图 2 基于RHC与VN的分布式协同制导流程
Figure 2. Flow of distributed cooperative guidance based on RHC and VN

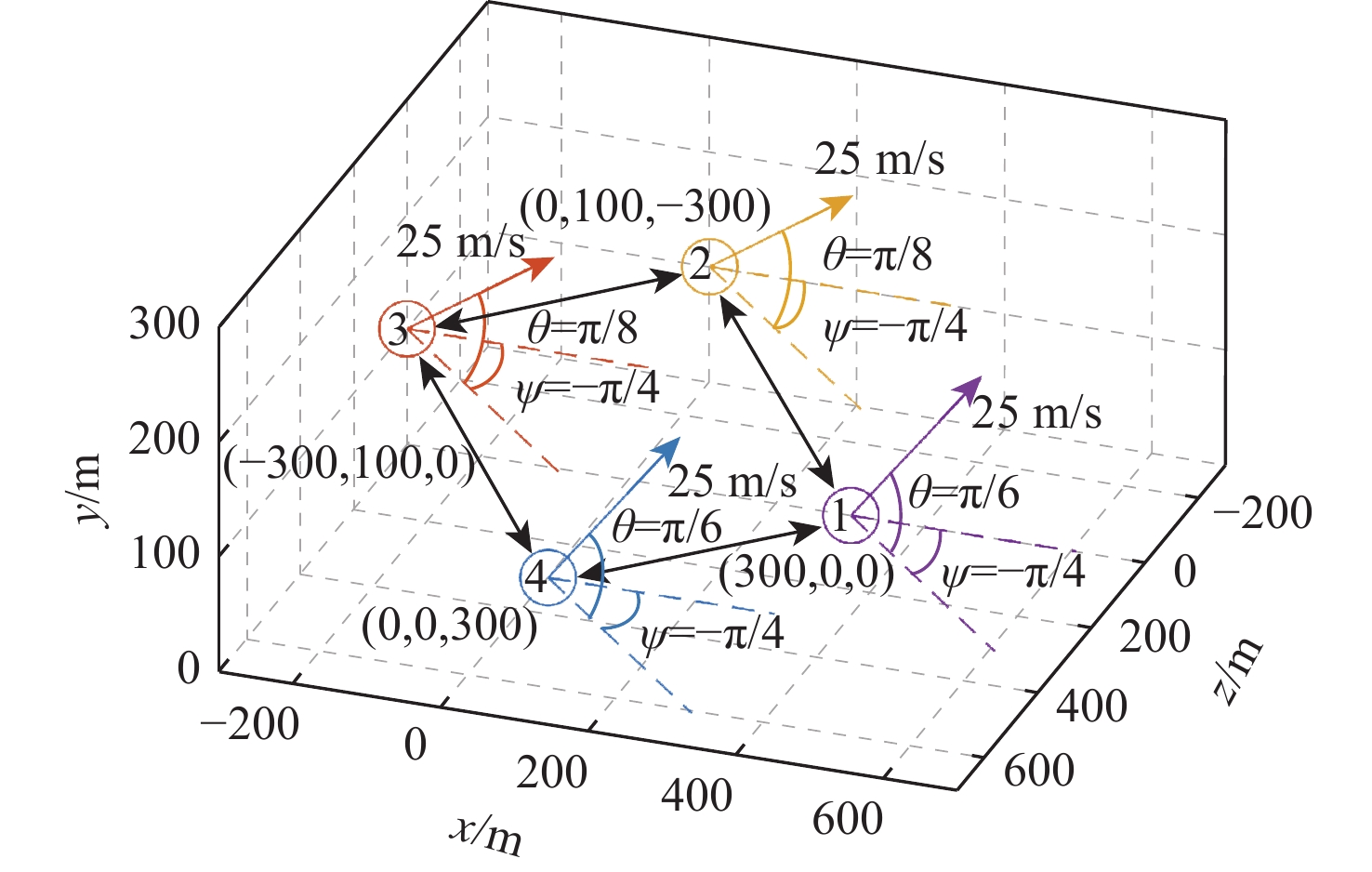
图 3 各无人机通信拓扑结构及初始状态示意图
Figure 3. Schematic diagram of communication topology and initial state of each UAV
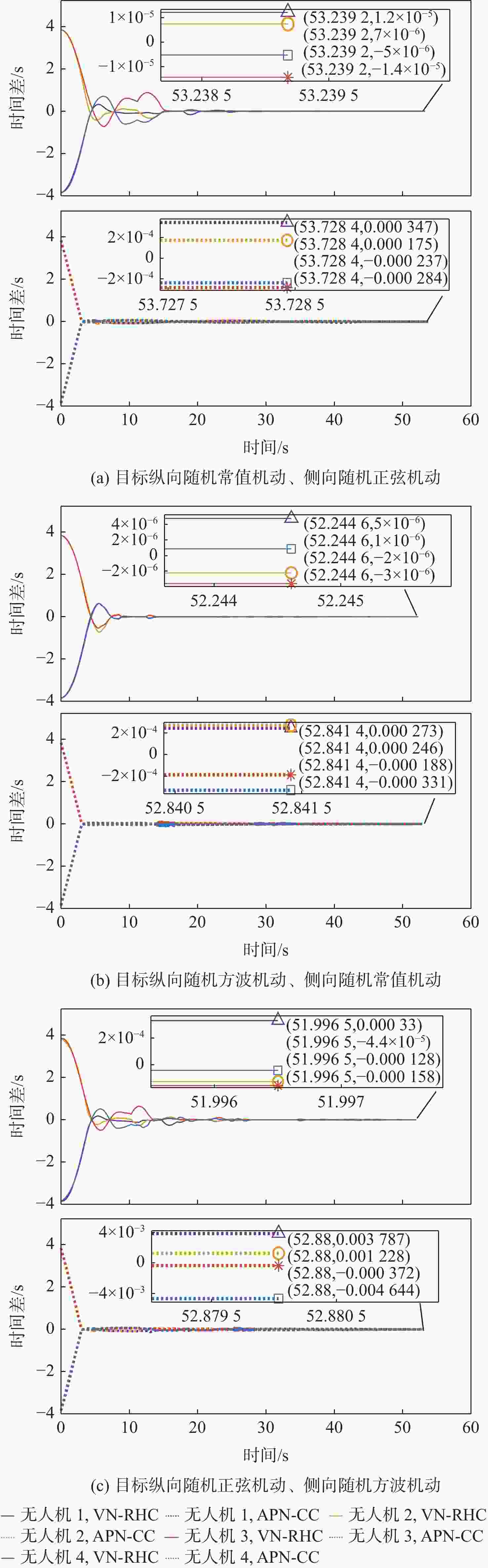
图 6 剩余攻击时间与平均剩余攻击时间之差变化情况
Figure 6. Variation of difference between time to go and average time to go
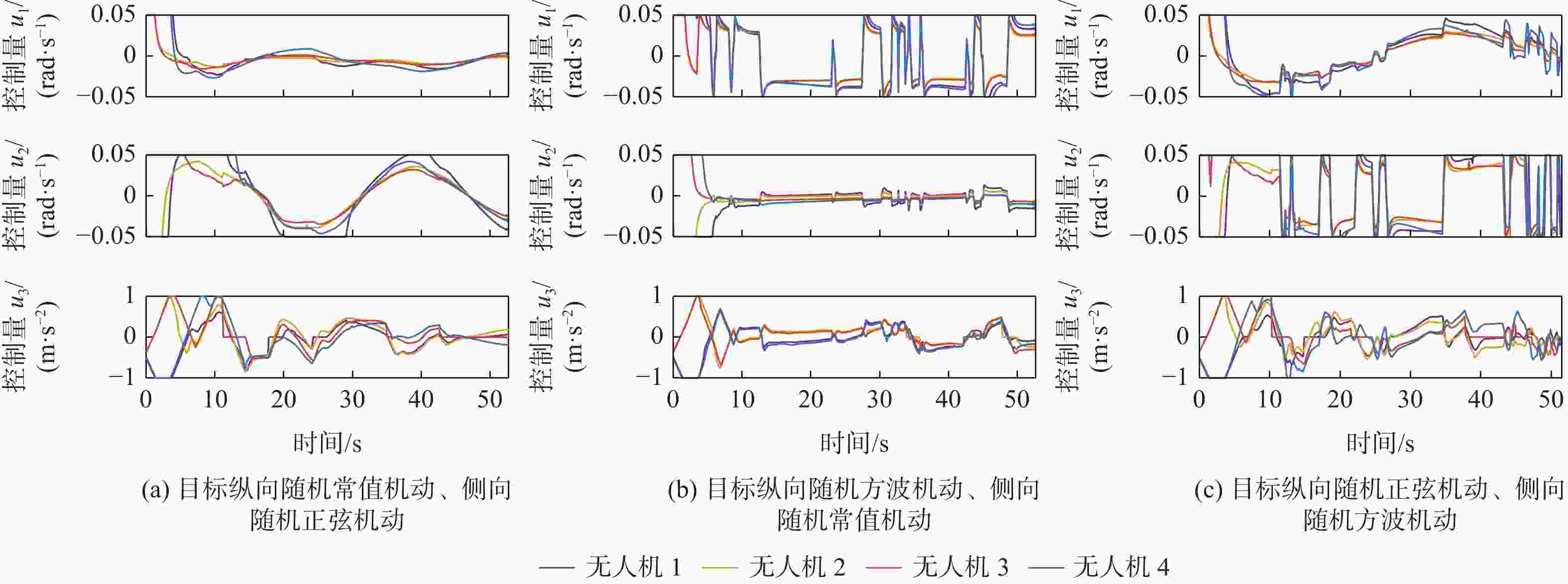
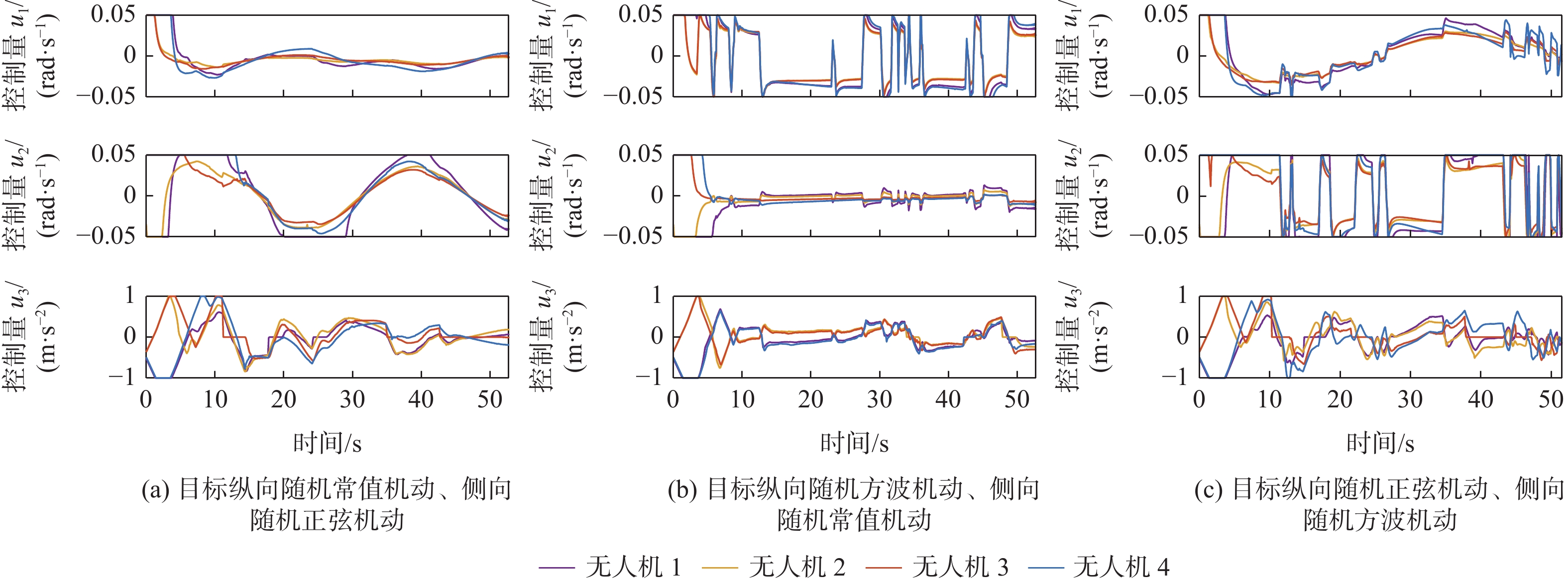
图 7 VN-RHC协同制导策略下无人机制导指令变化情况
Figure 7. Variation of UAV guidance command under VN-RHC cooperative guidance strategy
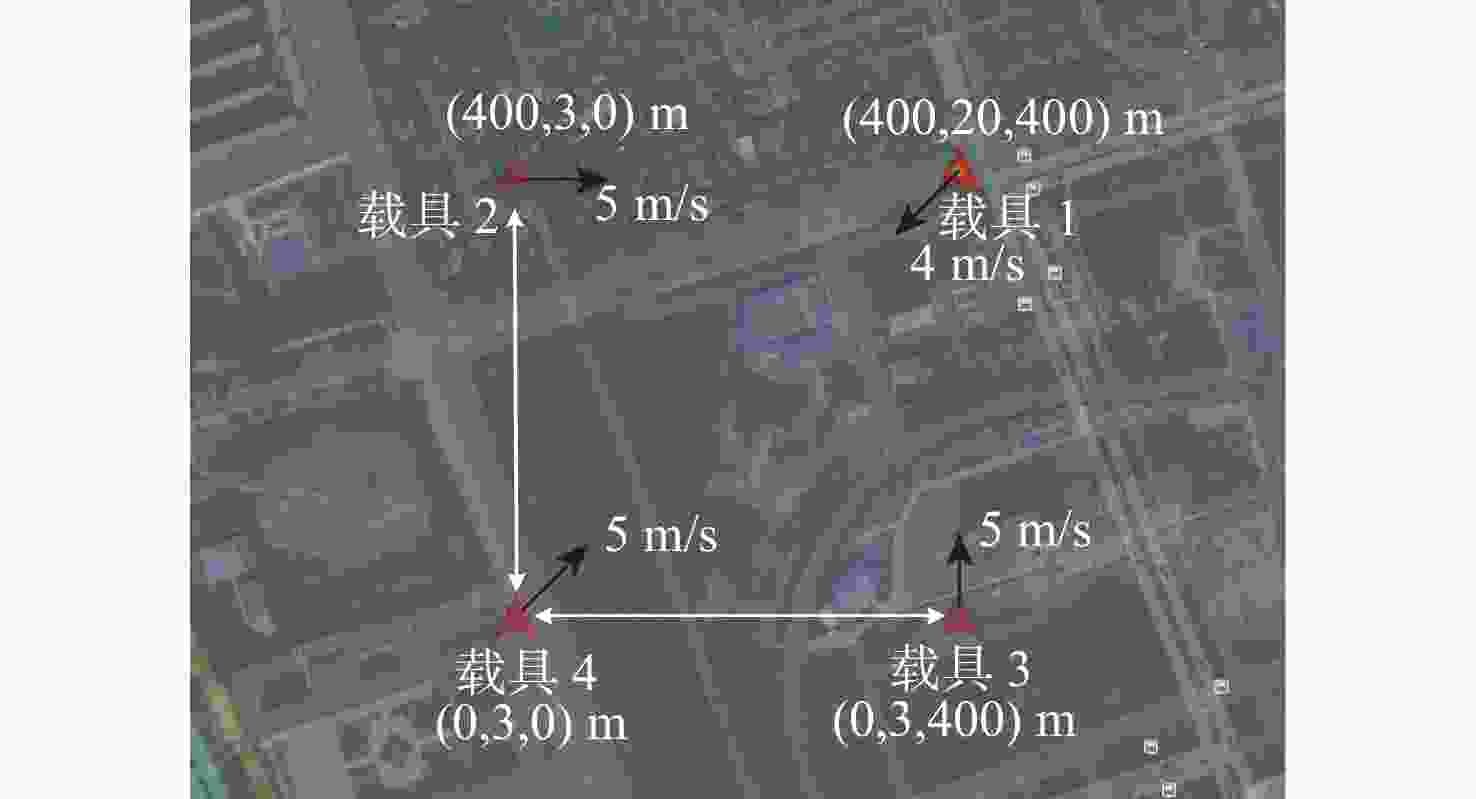
图 13 无人机-目标初始状态及无人机通信拓扑结构
Figure 13. Initial state of UAVs and target and communication topology of UAVs

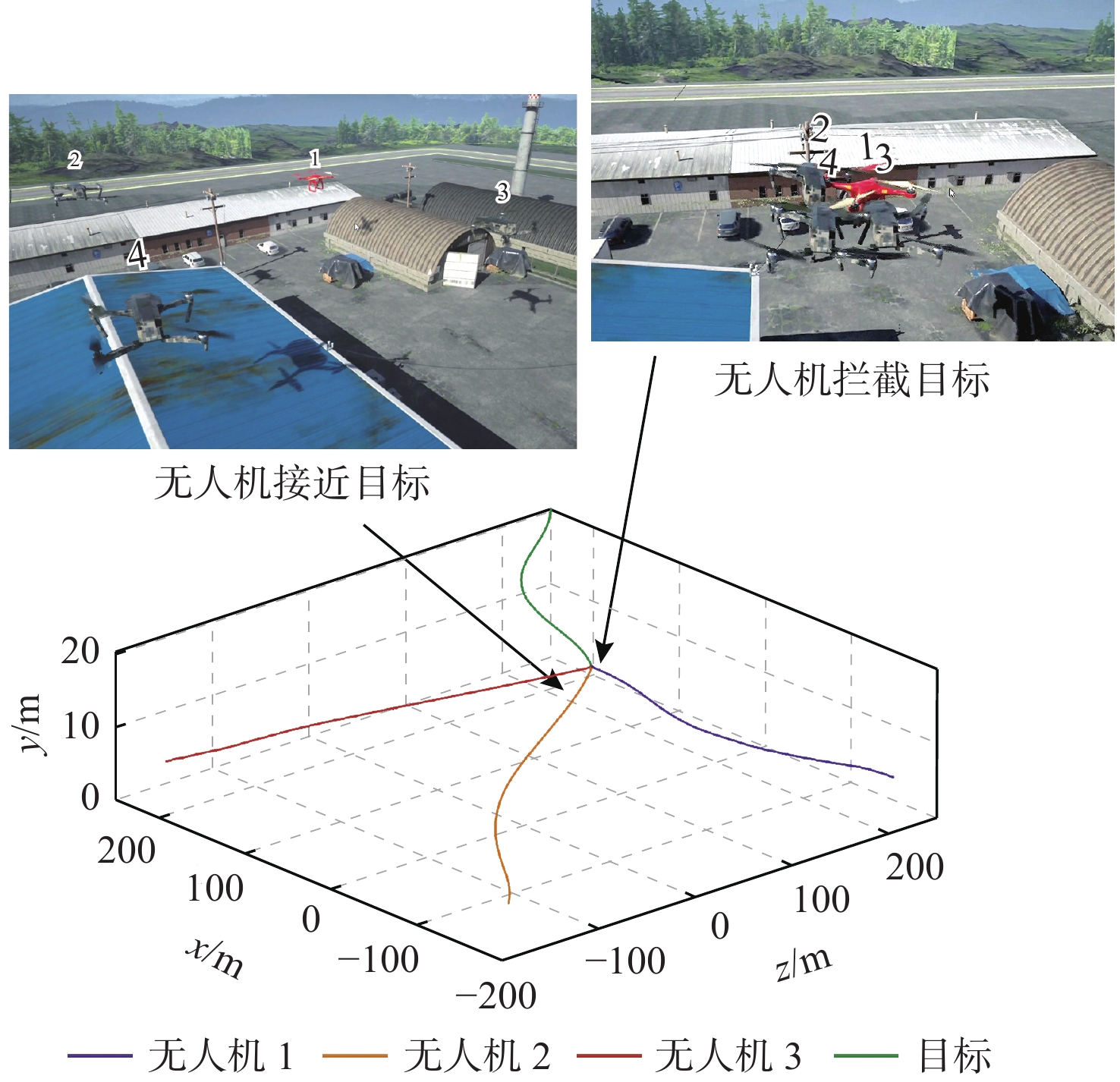
图 14 半实物仿真实验无人机、目标三维运动轨迹
Figure 14. Three-dimensional motion trajectory of UAVs and target in hardware in loop simulation
表 1 目标初始状态
Table 1. Target initial state
x/m y/m z/m 航迹倾斜角/rad 航迹偏转角/rad 空速/(m·s−1) 1500 800 1500 0 3π/4 20  下载: 导出CSV
下载: 导出CSV
表 2 无人机及目标性能参数
Table 2. Performance parameters of UAVs and target
无人机/
目标最大航迹
倾斜角速度/
(rad·s−1)最大航迹
偏转角速度/
(rad·s−1)最大加速度/
(m·s−2)最大空速/
(m·s−1)最小空速/
(m·s−1)无人机1 0.05 0.05 1 30 20 无人机2 0.05 0.05 1 30 20 无人机3 0.05 0.05 1 30 20 无人机4 0.05 0.05 1 30 20 目标 0.05 0.05
下载: 导出CSV
表 3 2种协同制导策略的制导效果
Table 3. Guidance performance of two cooperative guidance strategies
制导策略 总脱靶量/m 总攻击时间误差/s 纵向随机常值机动、
侧向随机正弦机动纵向随机方波机动、
侧向随机常值机动纵向随机正弦机动、
侧向随机方波机动纵向随机常值机动、
侧向随机正弦机动纵向随机方波机动、
侧向随机常值机动纵向随机正弦机动、
侧向随机方波机动VN-RHC 0.0063 0.0024 0.1439 3.936×10−5 1.127×10−5 6.593×10−4 APN-CC 0.0513 0.0447 0.9027 0.001 0.001 0.01
下载: 导出CSV
表 4 不同算法参数下的仿真结果
Table 4. Simulation results under different algorithm parameters
仿真
次序NARnet最大单步
训练次数无人机最大单步
协商次数平均
脱靶量/m平均攻击
时间误差/s平均单步
训练次数平均单步
协商次数无人机平均
单步决策用时/s计算总时长/s 1 100 100 0.0143 6.193×10−5 19 28 0.0178 112 2 100 50 0.0133 6.386×10−5 19 21 0.0151 95.0469 3 100 20 0.0220 2.432×10−4 19 13 0.0125 79.2656 4 50 100 0.0151 7.838×10−5 18 28 0.0181 114.0781 5 50 50 0.0127 5.917×10−5 18 20 0.0149 93.8594 6 50 20 0.0193 1.750×10−4 18 13 0.0121 76.4375
下载: 导出CSV
-
[1] 陈清阳, 辛宏博, 王玉杰, 等. 一种多机协同打击的快速航迹规划方法[J]. 北京航空航天大学学报, 2022, 48(7): 1145-1153. doi: 10.13700/j.bh.1001-5965.2021.0022CHEN Q Y, XIN H B, WANG Y J, et al. A rapid path planning method for multiple UAVs to cooperative strike[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1145-1153(in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0022 [2] 王晓光, 章卫国, 刘洋. 伴飞诱饵干扰下的自杀式无人机攻击策略[J]. 航空学报, 2015, 36(9): 3137-3146.WANG X G, ZHANG W G, LIU Y. Suicide drones’ attack strategy on the condition of escort free-flight decoys influence[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(9): 3137-3146(in Chinese). [3] 吴捷, 胡盛华, 乔莎莎, 等. “忠诚僚机”式有人/无人机协同作战概念与任务管理技术研究[J]. 航空电子技术, 2021, 52(2): 27-31.WU J, HU S H, QIAO S S, et al. Research on combat concept and mission management technique of “loyal wingman” manned/unmanned aerial vehicle collaborative[J]. Avionics Technology, 2021, 52(2): 27-31(in Chinese). [4] 田磊, 赵启伦, 董希旺, 等. 拒止环境下基于“忠诚僚机”的护航策略[J]. 北京航空航天大学学报, 2021, 47(5): 1058-1067. doi: 10.13700/j.bh.1001-5965.2020.0090TIAN L, ZHAO Q L, DONG X W, et al. Escort strategy based on loyal wingman in denial environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(5): 1058-1067(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0090 [5] ZHAO J, ZHOU R. Unified approach to cooperative guidance laws against stationary and maneuvering targets[J]. Nonlinear Dynamics, 2015, 81(4): 1635-1647. doi: 10.1007/s11071-015-2096-z [6] 彭琛, 刘星, 吴森堂, 等. 多弹分布式协同末制导时间一致性研究[J]. 控制与决策, 2010, 25(10): 1557-1561.PENG C, LIU X, WU S T, et al. Consensus problems in distributed cooperative terminal guidance time of multi-missiles[J]. Control and Decision, 2010, 25(10): 1557-1561(in Chinese). [7] 杨剑影, 周佳玲, 魏小倩. 多导弹攻击高机动目标的分布式协同制导关键技术[J]. 航空兵器, 2017, 24(3): 3-12. doi: 10.19297/j.cnki.41-1228/tj.2017.03.001YANG J Y, ZHOU J L, WEI X Q. Key technologies of distributed cooperative guidance and control method for multiple missiles attacking the maneuvering target[J]. Aero Weaponry, 2017, 24(3): 3-12(in Chinese). doi: 10.19297/j.cnki.41-1228/tj.2017.03.001 [8] 赵世钰, 周锐. 基于协调变量的多导弹协同制导[J]. 航空学报, 2008, 29(6): 1605-1611. doi: 10.3321/j.issn:1000-6893.2008.06.031ZHAO S Y, ZHOU R. Multi-missile cooperative guidance using coordination variables[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(6): 1605-1611(in Chinese). doi: 10.3321/j.issn:1000-6893.2008.06.031 [9] 张帅, 宋天莉, 焦巍, 等. 带有拦截时间约束的协同制导方法[J]. 北京航空航天大学学报, 2023, 49(8): 1956-1963. doi: 10.13700/j.bh.1001-5965.2021.0569ZHANG S, SONG T L, JIAO W, et al. Cooperative guidance method with interception time constraint[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(8): 1956-1963(in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0569 [10] 田野, 蔡远利, 邓逸凡. 一种带时间协同和角度约束的多导弹三维协同制导律[J]. 控制理论与应用, 2022, 39(5): 788-798.TIAN Y, CAI Y L, DENG Y F. A 3D cooperative guidance law for multiple missiles with line-of-sight angle constraint[J]. Control Theory & Applications, 2022, 39(5): 788-798(in Chinese). [11] CHO D, KIM H J, TAHK M J. Nonsingular sliding mode guidance for impact time control[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(1): 61-68. doi: 10.2514/1.G001167 [12] ZHANG Y A, WANG X L, WU H L. Impact time control guidance law with field of view constraint[J]. Aerospace Science and Technology, 2014, 39: 361-369. doi: 10.1016/j.ast.2014.10.002 [13] 邹丽, 丁全心, 周锐. 异构多导弹网络化分布式协同制导方法[J]. 北京航空航天大学学报, 2010, 36(12): 1432-1435.ZOU L, DING Q X, ZHOU R. Distributed cooperative guidance for multiple heterogeneous networked missiles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(12): 1432-1435(in Chinese). [14] ZHAO S Y, ZHOU R. Cooperative guidance for multimissile salvo attack[J]. Chinese Journal of Aeronautics, 2008, 21(6): 533-539. doi: 10.1016/S1000-9361(08)60171-5 [15] 邹丽, 周锐, 赵世钰, 等. 多导弹编队齐射攻击分散化协同制导方法[J]. 航空学报, 2011, 32(2): 281-290.ZOU L, ZHOU R, ZHAO S Y, et al. Decentralized cooperative guidance for multiple missile groups in salvo attack[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(2): 281-290(in Chinese). [16] 王晓芳, 刘冬责, 郑艺裕, 等. 一种基于模型预测控制技术的多导弹协同作战制导方法: CN105202972A[P]. 2017-01-18.WANG X F, LIU D Z, ZHENG Y Y, et al. Multi-missile cooperative engagement guidance method based on model predictive control technique: CN105202972A[P]. 2017-01-18(in Chinese). [17] 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018: 168-171.DUAN H B, QIU H X. Unmanned aerial vehicle swarm autonomous control based on swarm intelligence[M]. Beijing: Science Press, 2018: 168-171(in Chinese). [18] CASADO E J M, SCARLATTI D, ESTEBAN-CAMPILLO D, et al. Network of unmanned vehicles: US20140074339[P]. 2014-03-13. [19] JOHNSON L, CHOI H L, HOW J P. The hybrid information and plan consensus algorithm with imperfect situational awareness[C]//Proceedings of the Springer Tracts in Advanced Robotics. Berlin: Springer, 2016: 221-233. [20] 杨海民, 潘志松, 白玮. 时间序列预测方法综述[J]. 计算机科学, 2019, 46(1): 21-28. doi: 10.11896/j.issn.1002-137X.2019.01.004YANG H M, PAN Z S, BAI W. Review of time series prediction methods[J]. Computer Science, 2019, 46(1): 21-28(in Chinese). doi: 10.11896/j.issn.1002-137X.2019.01.004 [21] 孙雪娇, 周锐, 吴江, 等. 攻击机动目标的多导弹分布式协同制导律[J]. 北京航空航天大学学报, 2013, 39(10): 1403-1407. doi: 10.13700/j.bh.1001-5965.2013.10.023SUN X J, ZHOU R, WU J, et al. Distributed cooperative guidance law for multiple missiles attacking maneuver target[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(10): 1403-1407(in Chinese). doi: 10.13700/j.bh.1001-5965.2013.10.023 -

 下载:
下载:









 点击查看大图
点击查看大图
计量
- 文章访问数: 169
- HTML全文浏览量: 45
- PDF下载量: 19
- 被引次数: 0
