



Integrated control method for quadrotors’ aggressive trajectory tracking under multiple constraints
-
摘要:
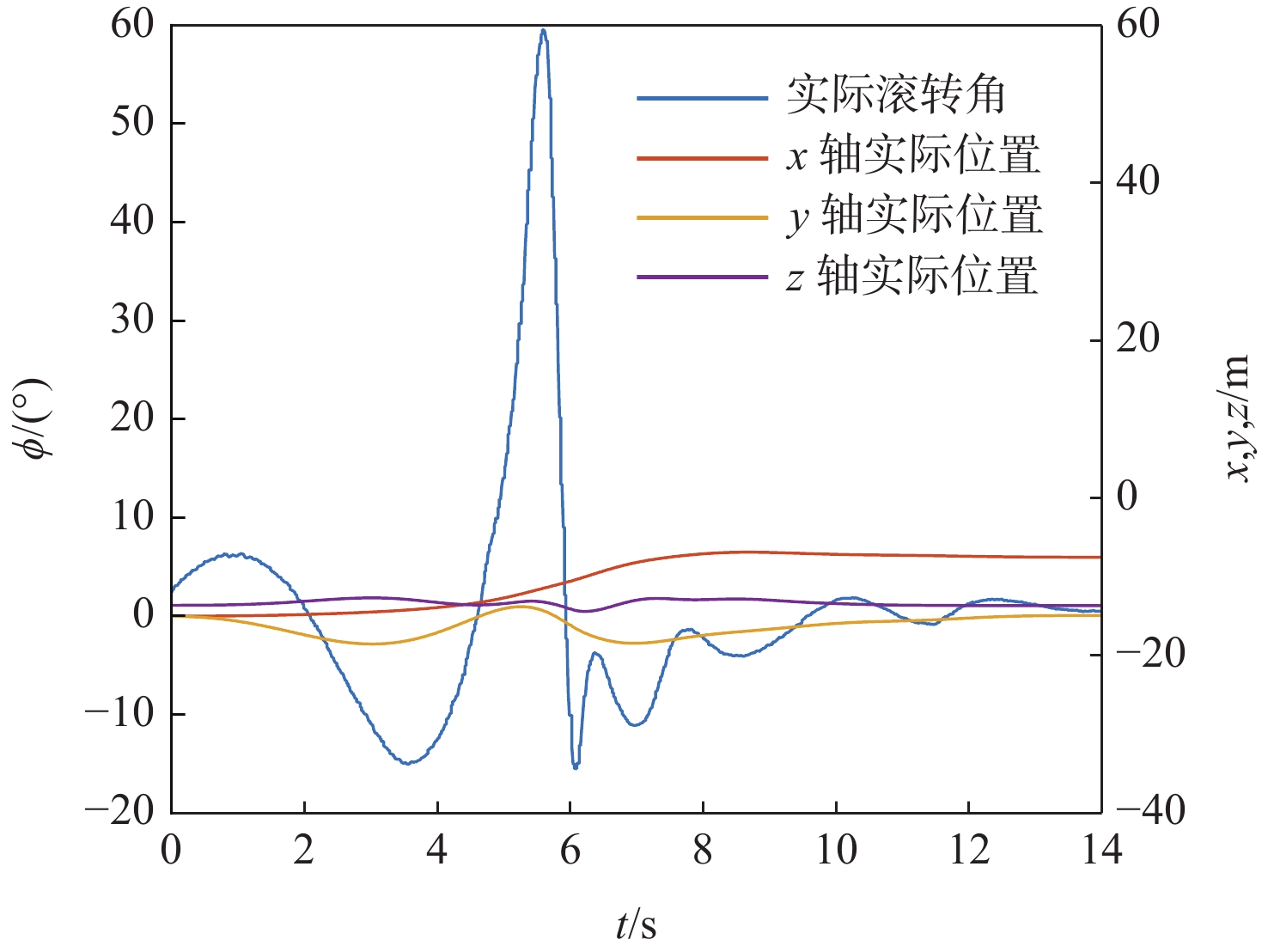
四旋翼无人机高动态飞行需求的增加使其成为一个越来越热门的研究主题。针对四旋翼执行废墟裂缝和树林缝隙穿越任务时的大机动轨迹状态跟踪控制问题,提出基于模型预测控制的一体化控制方法,包含多约束条件下的高机动轨迹规划和多参考状态量的一体化跟踪控制,并通过飞行试验验证了所提方法相比前馈PID控制方法在跟踪规划的高机动轨迹时的优越性能。在飞行试验中,四旋翼成功穿越了60°滚转角的窄框,其实际滚转角达到60°大角度的同时,
z 轴误差仅为0.065 m。Abstract:The increasing demand for high-dynamic flight of quadrotors has made it an increasingly popular research topic. In order to solve the state tracking control problem of aggressive trajectories when quadrotors undertake activities such as navigating the cracks in the ruins and the gaps in the forest, this work develops an integrated control strategy based on model predictive control. This technique incorporates integrated tracking control of numerous reference states as well as aggressive trajectory planning under multiple limitations. Flight tests have verified the superior performance of the proposed control method in this paper compared with the feed-forward PID control method in tracking the planned aggressive trajectories. In-flight tests, quadrotors successfully crossed the narrow gap of 60° roll angle, and their actual roll angle reached a large angle of 60°, while the z-axis error is only 0.065 m.
-
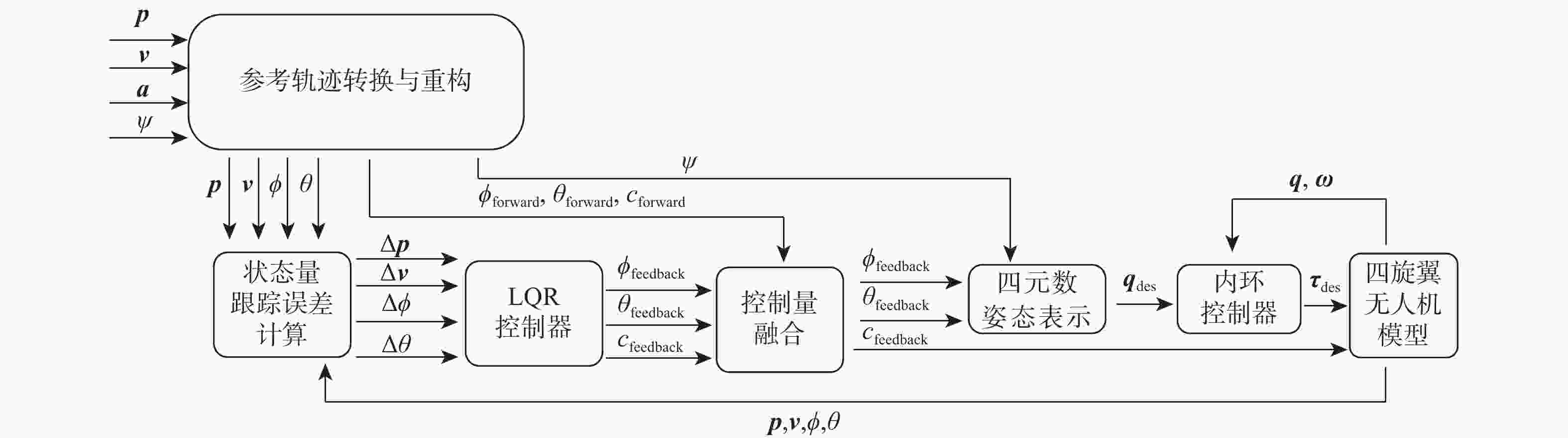
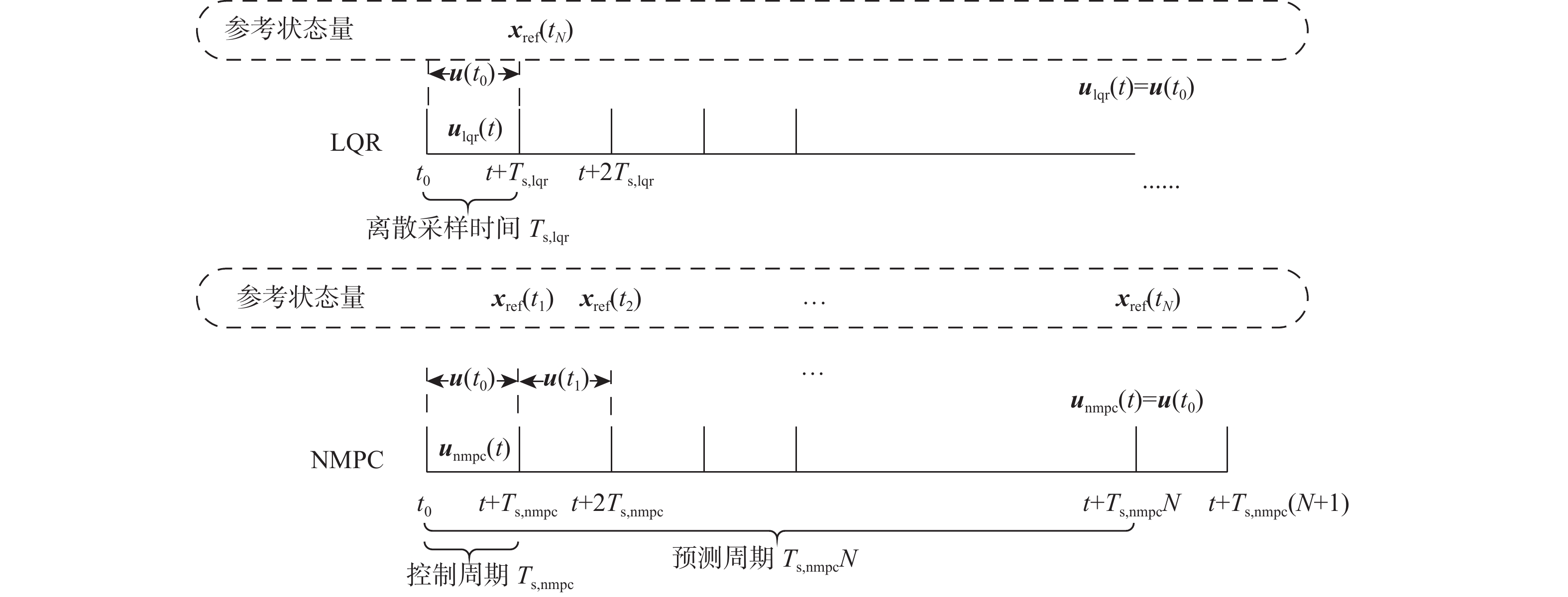
图 4 基于线性二次调节的反馈控制状态跟踪
Figure 4. Feedback control state tracking based on linear quadratic regulation
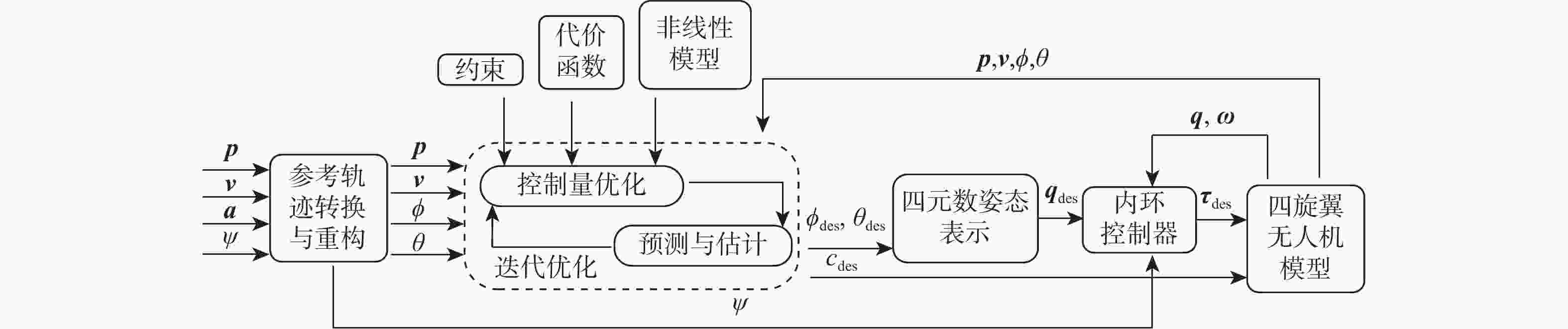
图 5 基于非线性模型预测控制的前馈控制状态跟踪
Figure 5. Feed-forward control state tracking based on nonlinear model predictive control

图 9 穿越60°滚转角窄框时各坐标轴的位置量及各阶导数曲线
Figure 9. Three-axis positions and derivative curves when crossing 60° roll narrow gap
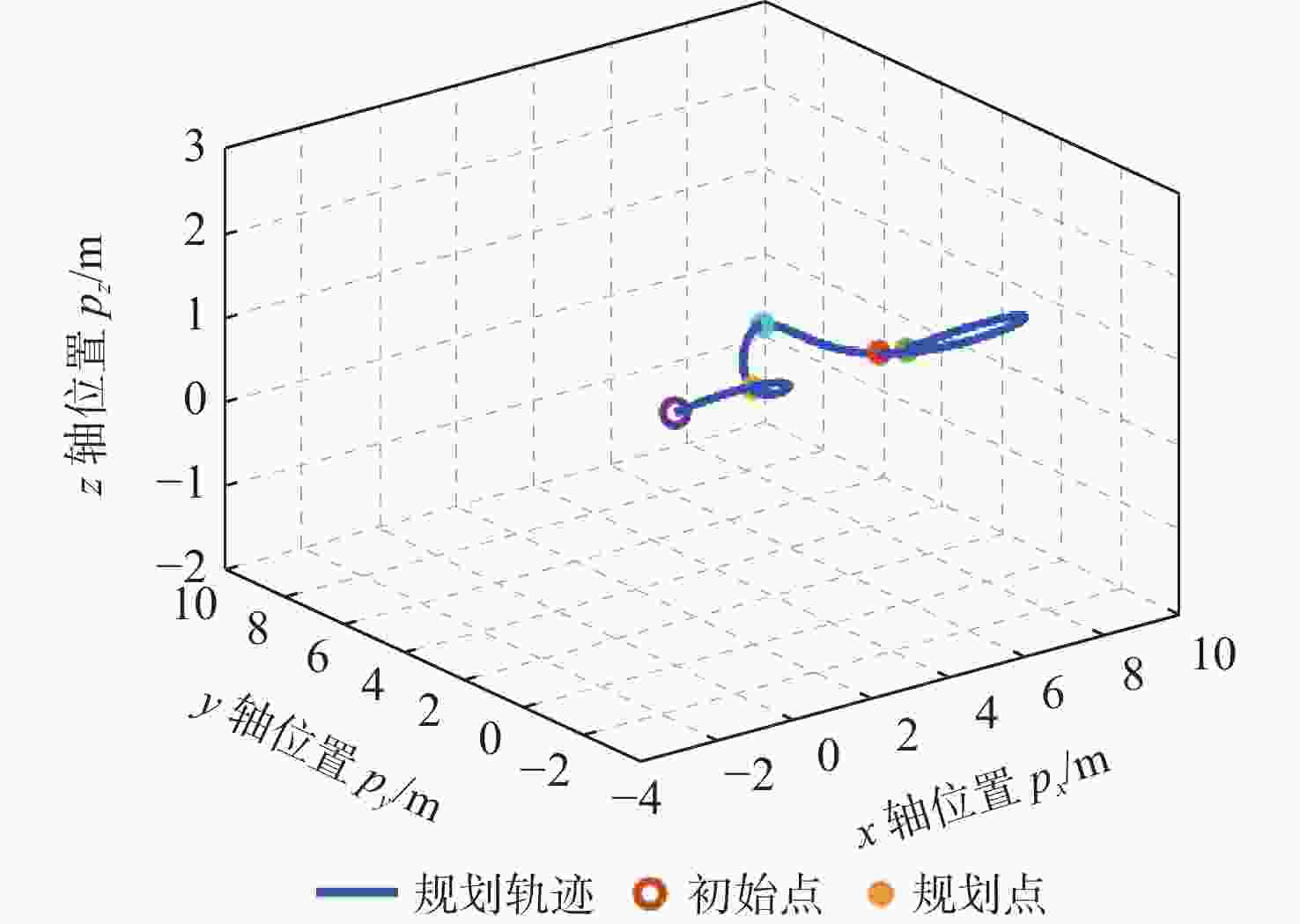
图 10 穿越60°滚转角窄框的轨迹及关键点
Figure 10. Trajectory and key points when crossing 60° roll narrow gap

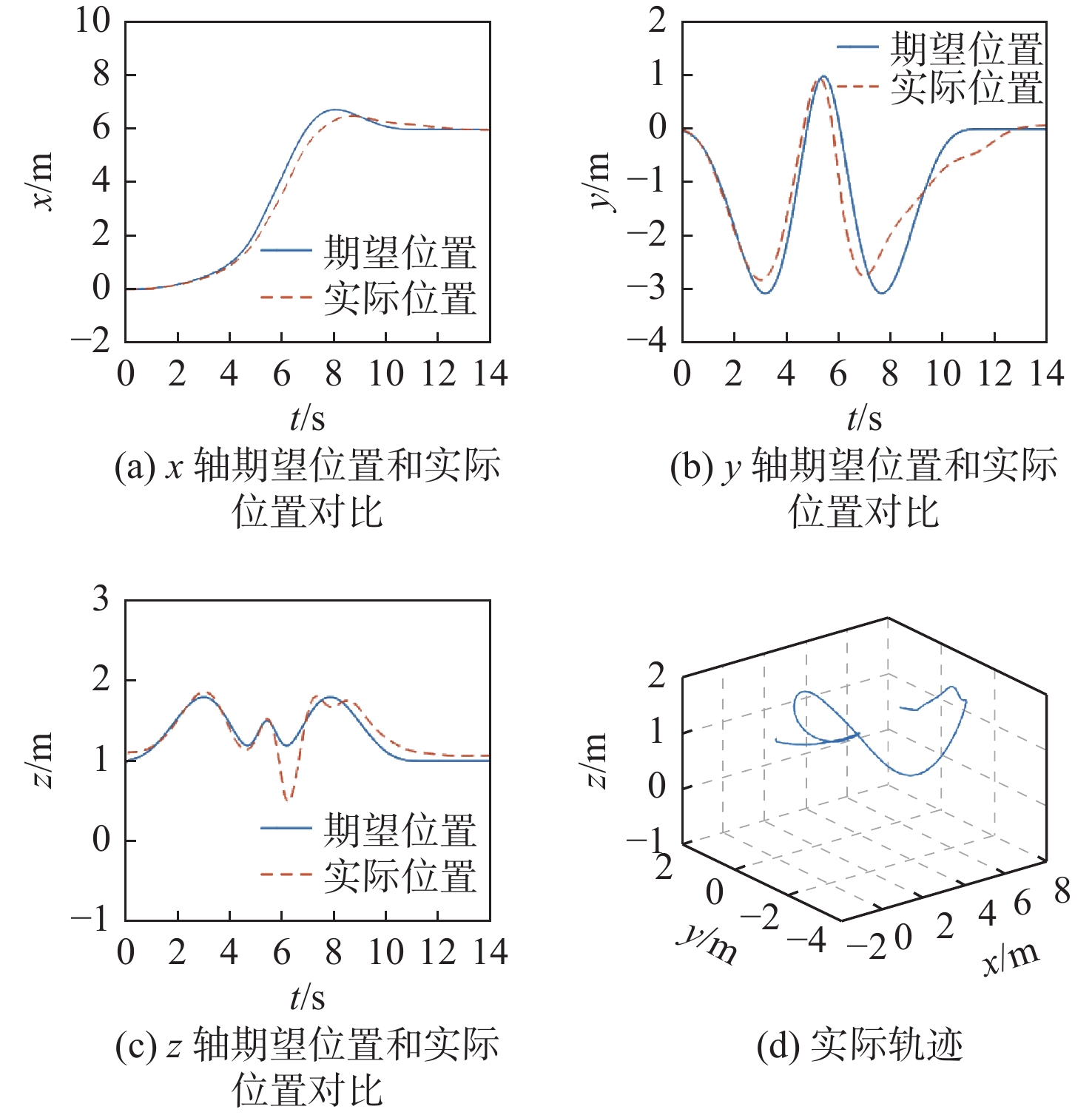
图 11 穿越60°滚转角窄框时各轴的期望位置和实际位置曲线
Figure 11. Three-axis expected and actual positions when crossing 60° roll narrow gap
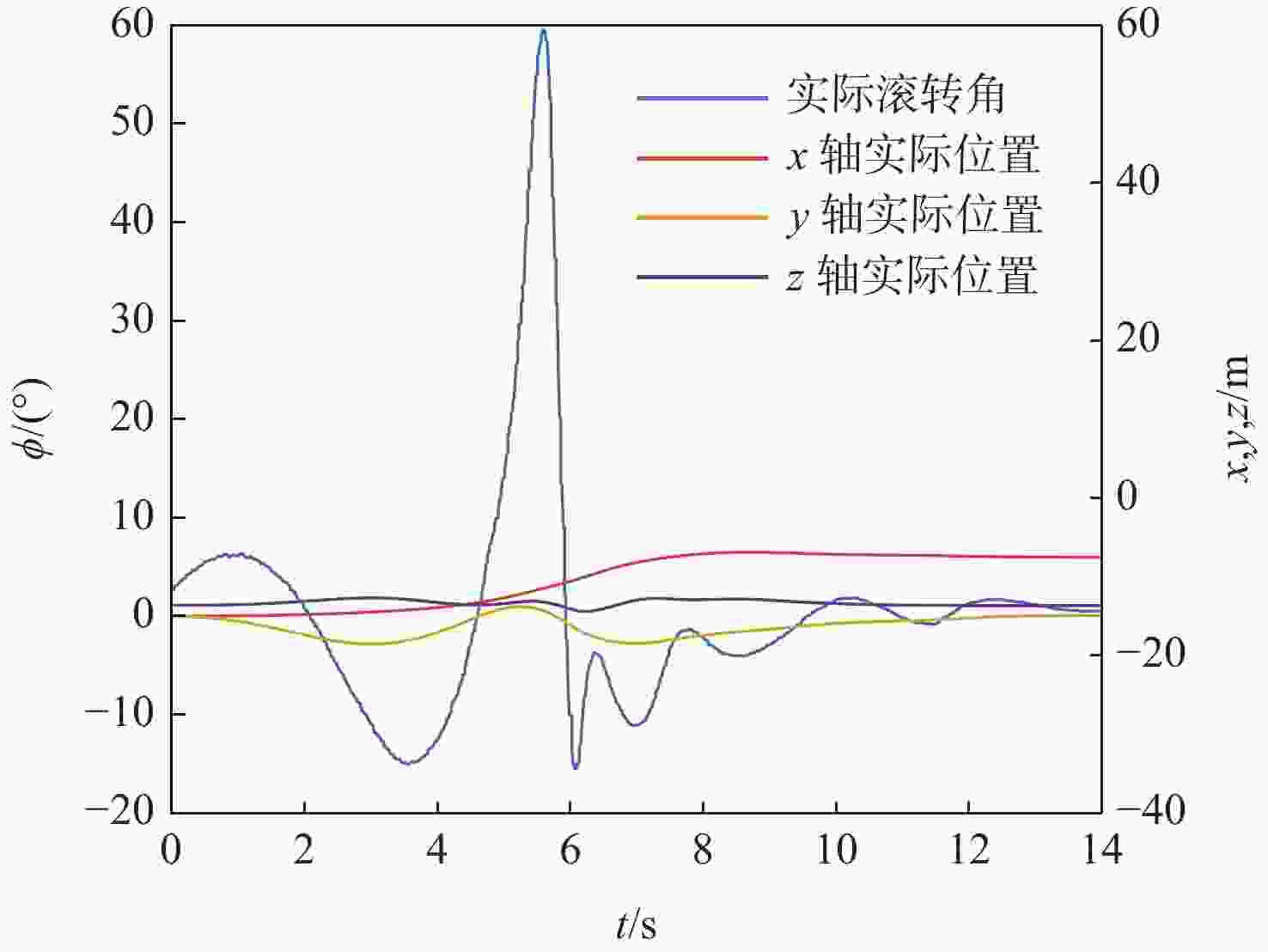
图 12 穿越60°滚转角窄框时各坐标轴实际位置和实际滚转角
Figure 12. Three-axis actual positions and actual roll angle when crossing 60° roll narrow gap

图 13 四旋翼穿越60 °滚转角窄框的连续过程
Figure 13. Continuous process of a quadrotor crossing 60 ° roll narrow gap
表 1 四旋翼无人机参数
Table 1. Quadcopter UAV parameters
型号 轴距/mm 电机型号 桨叶型号 总质量/kg F330 330 TMOTOR F80 Pro 5055三叶桨 1.2  下载: 导出CSV
下载: 导出CSV
表 2 60°滚转角穿框轨迹规划的约束设置
Table 2. Constraint settings of frame trajectory planning when crossing a 60° roll angle gap
初始点
位置量/m终止点
位置量/m穿越
滚转角/(°)穿越点
速度/(m·s−1)穿越点
位置量/m穿越点
加速度量/(m·s−2)穿越前缓冲点
z轴位置/m穿越后缓冲点
z轴位置/m轨迹段数 轨迹段
时间分配/s(0,0,1) 330 60 (2.5,0,0) (3,1,1.5) (0,−8.3138,−5) 1.2 1.2 4 4.3,0.7,0.7,4.3
下载: 导出CSV
表 3 本文方法主要参数
Table 3. Main parameters of proposed method
位置量
权值向量速度量
权值向量俯仰角
权值系数滚转角
权值系数期望俯仰角
权值系数期望滚转角
权值系数前馈控制项
权值系数反馈控制项
权值系数控制频率/Hz [300,500,300] [30,50,20] 50 300 20 100 0.4 0.65 100
下载: 导出CSV
表 4 不同滚转角穿框轨迹下前馈PID控制方法和本文方法的实际穿越点对比
Table 4. Comparison of actual crossing points between feed-forward PID control method and proposed method under trajectories with different roll angles
方法 期望滚
转角/(°)实际
角度/(°)x轴
误差/my轴
误差/mz轴
误差/m前馈PID
控制方法30 28.32 0.767 0.038 0.210 40 33.68 0.647 0.107 0.231 60 53.63 0.726 0.499 0.373 本文
方法30 31.31 0.229 0.015 0.007 40 40.46 0.223 0.125 0.076 60 59.55 0.115 0.373 0.065
下载: 导出CSV
-
[1] FAESSLER M, FONTANA F, FORSTER C, et al. Autonomous, vision-based flight and live dense 3D mapping with a quadrotor micro aerial vehicle[J]. Journal of Field Robotics, 2016, 33(4): 431-450. doi: 10.1002/rob.21581 [2] CASTELLANO G, CASTIELLO C, MENCAR C, et al. Crowd detection in aerial images using spatial graphs and fully-convolutional neural networks[J]. IEEE Access, 2020, 8: 64534-64544. doi: 10.1109/ACCESS.2020.2984768 [3] CUSTERS B. The future of drone use[M]. Hague: TMC Asser Press, 2016: 3-20. [4] MARTINEZ C, SAMPEDRO C, CHAUHAN A, et al. Towards autonomous detection and tracking of electric towers for aerial power line inspection[C]// 2014 International Conference on Unmanned Aircraft Systems. Piscataway: IEEE Press, 2014: 284-295. [5] PASCHALL S, ROSE J. Fast, lightweight autonomy through an unknown cluttered environment[C]// 2017 IEEE Aerospace Conference. Piscataway: IEEE Press, 2017: 1-8. [6] FALANGA D, MUEGGLER E, FAESSLER M, et al. Aggressive quadrotor flight through narrow gaps with onboard sensing and computing using active vision[C]// 2017 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2017: 5774-5781. [7] ZHOU B Y, GAO F, WANG L Q, et al. Robust and efficient quadrotor trajectory generation for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3529-3536. doi: 10.1109/LRA.2019.2927938 [8] ZHOU B Y, PAN J, GAO F, et al. RAPTOR: Robust and perception-aware trajectory replanning for quadrotor fast flight[J]. IEEE Transactions on Robotics, 2021, 37(6): 1992-2009. doi: 10.1109/TRO.2021.3071527 [9] GAO F, WU W, GAO W L, et al. Flying on point clouds: online trajectory generation and autonomous navigation for quadrotors in cluttered environments[J]. Journal of Field Robotics, 2019, 36(4): 710-733. doi: 10.1002/rob.21842 [10] QUAN L, HAN L X, ZHOU B Y, et al. Survey of UAV motion planning[J]. IET Cyber-Systems and Robotics, 2020, 2(1): 14-21. doi: 10.1049/iet-csr.2020.0004 [11] FAESSLER M, FALANGA D, SCARAMUZZA D. Thrust mixing, saturation, and body-rate control for accurate aggressive quadrotor flight[J]. IEEE Robotics and Automation Letters, 2017, 2(2): 476-482. doi: 10.1109/LRA.2016.2640362 [12] FOEHN P, SCARAMUZZA D. Onboard state dependent LQR for agile quadrotors[C]// 2018 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2018: 6566-6572. [13] FAESSLER M, FRANCHI A, SCARAMUZZA D. Differential flatness of quadrotor dynamics subject to rotor drag for accurate tracking of high-speed trajectories[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 620-626. doi: 10.1109/LRA.2017.2776353 [14] FALANGA D, FOEHN P, LU P, et al. PAMPC: Perception-aware model predictive control for quadrotors[C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2019: 1-8. [15] SUN S, ROMERO A, FOEHN P, et al. A comparative study of nonlinear MPC and differential-flatness-based control for quadrotor agile flight[J]. IEEE Transactions on Robotics, 2022, 38(6): 3357-3373. doi: 10.1109/TRO.2022.3177279 [16] HANOVER D, FOEHN P, SUN S H, et al. Performance, precision, and payloads: Adaptive nonlinear MPC for quadrotors[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 690-697. doi: 10.1109/LRA.2021.3131690 [17] KOSTADINOV D, SCARAMUZZA D. Online weight-adaptive nonlinear model predictive control[C]// 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2021: 1180-1185. [18] MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]// 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2011: 2520-2525. -

 下载:
下载:









 点击查看大图
点击查看大图

计量
- 文章访问数: 244
- HTML全文浏览量: 30
- PDF下载量: 42
- 被引次数: 0
