



Tightly-coupled GNSS/INS spoofing detection algorithm for LS-SVM and robust estimation
-
摘要:
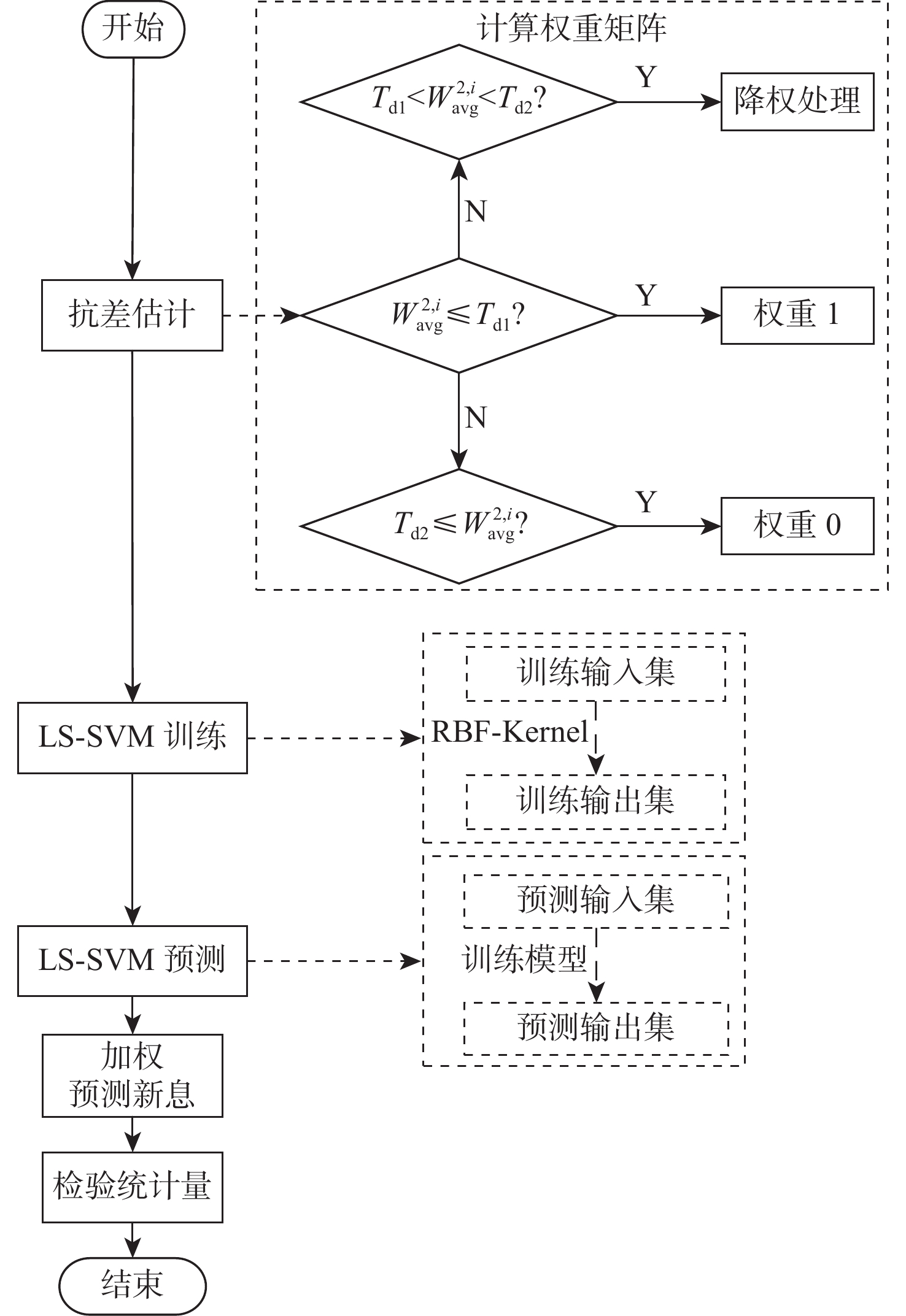
针对传统欺骗检测算法对斜率较小的斜坡式欺骗检测时间过长、虚警率和漏检率偏高等问题,提出一种最小二乘支持向量机(LS-SVM)和抗差估计的全球卫星导航系统(GNSS)和惯性导航系统(INS)紧组合欺骗检测算法。所提算法通过抗差自适应调整增益矩阵,有效削弱欺骗对新息的影响,将抗差优化的训练数据集经LS-SVM回归得到的预测新息来代替滤波器中的欺骗新息,从而进一步提高对斜率较小的斜坡式欺骗检测处理能力。仿真结果表明:在检测欺骗值为0.1 m/s的斜坡式欺骗时,所提算法与传统算法相比,检测时间缩短26.65%,虚警率降低40.63%,定位精度提高72.72%。所提算法具有检测快、虚警率低的优势,适用于GNSS/INS紧组合导航用户的斜坡式欺骗检测。
-
关键词:
- 最小二乘支持向量机 /
- 抗差估计 /
- GNSS/INS紧组合 /
- 欺骗检测 /
- 斜坡式
Abstract:The traditional spoofing detection algorithm suffers from a prolonged time of detecting ramp spoofing with small slopes, a high false alarm rate, and a high missed detection rate. Therefore, this study proposes a spoofing detection algorithm with tightly-coupled global navigation satellite system (GNSS) and inertial navigation system (INS) based on least squares-support vector machine (LS-SVM) and robust estimation. The algorithm effectively mitigates the influence of spoofing on innovation by adaptively adjusting the gain matrix with robustness. It then replaces the spoofing innovation in the filter with the forecasted innovation obtained by LS-SVM regression of the training data set optimized with robustness, thus further improving the detection and processing ability of ramp spoofing with small slopes. Simulation results show that when detecting 0.1 m/s ramp spoofing, the proposed algorithm can shorten the detection time by 26.65%, reduce the false alarm rate by 40.63% and improve the positioning accuracy by 72.72%, compared with the traditional algorithm. The proposed algorithm has the advantages of fast detection and low false alarm rate, suitable for ramp spoofing detection of tightly integrated GNSS/INS navigation users.
-
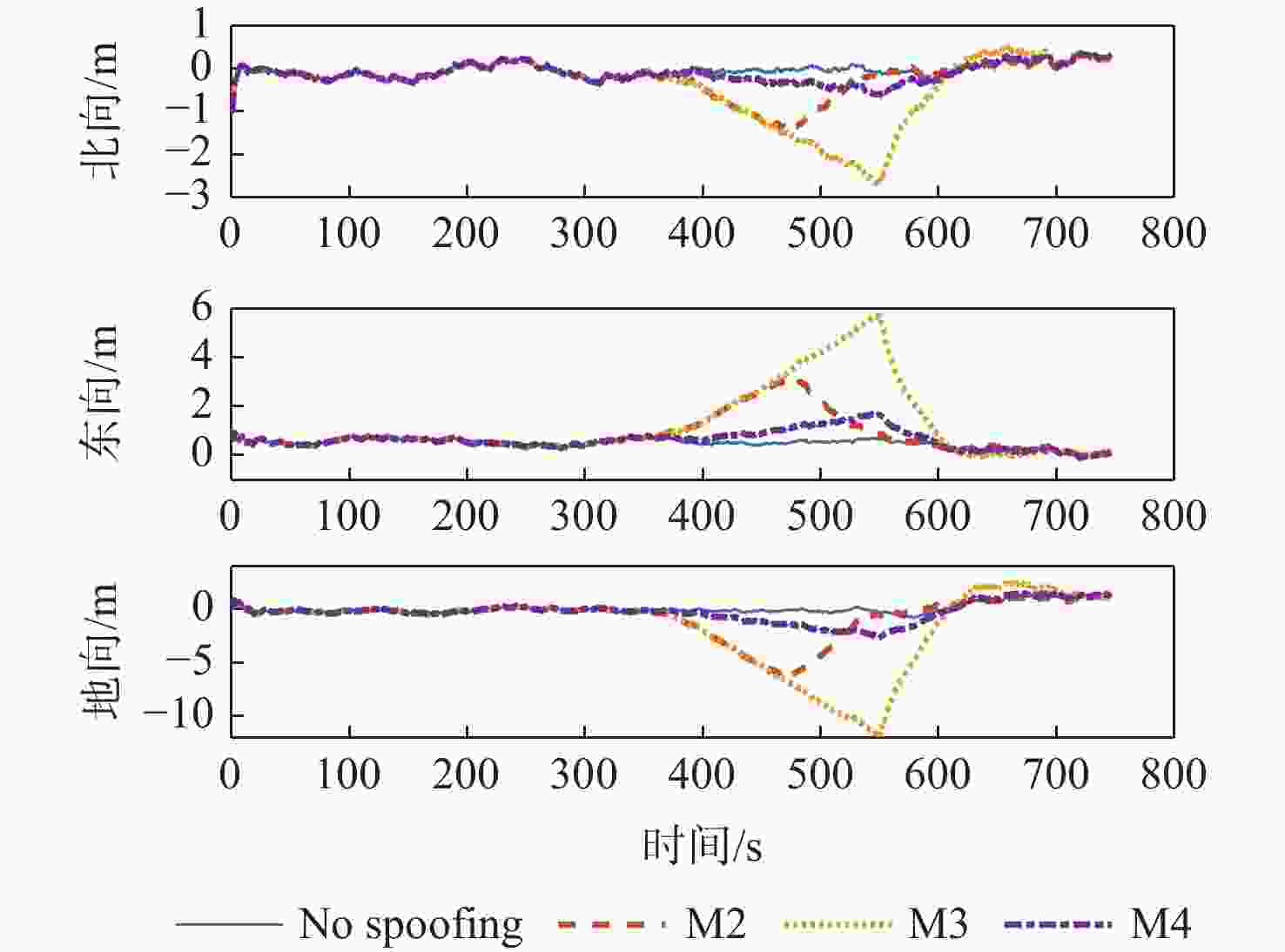
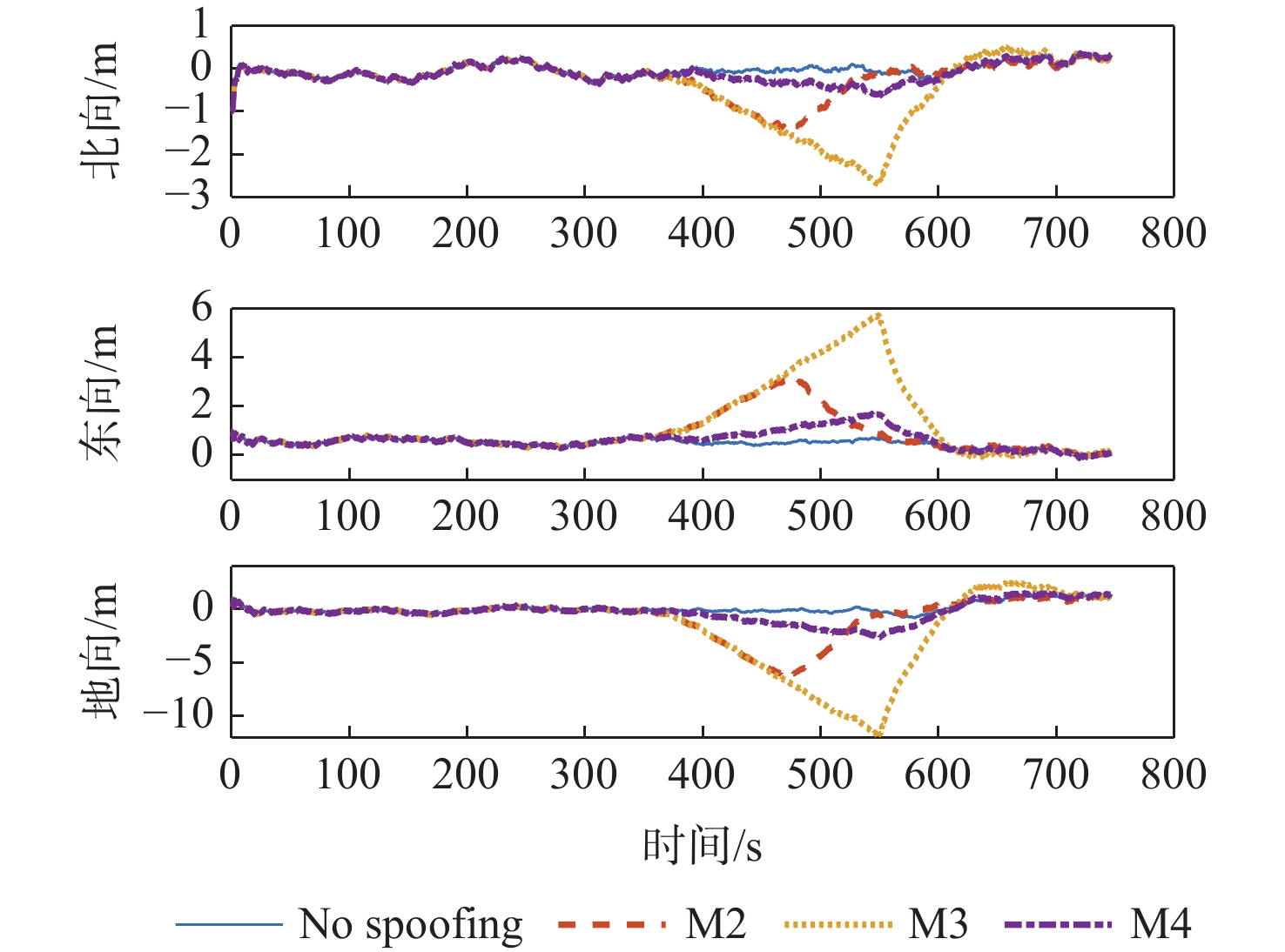
图 7 M2,M3和M4对通道6的位置误差仿真对比
Figure 7. Simulation comparison of position errors of M2, M3 and M4 on C6
表 1 欺骗场景设置
Table 1. Spoofing scenario settings
实验序号 欺骗值/(m·s−1) 通道 持续时间/s 1 0.5,0.4,0.3,0.2,0.1 1 350~550 2 0.1 1 350~550 3 0.1 1,6 350~550  下载: 导出CSV
下载: 导出CSV
表 2 IMU仿真参数设置
Table 2. IMU simulation parameter settings
加速度计随机
噪声/$ \left({{{\rm{mg}}} \cdot {\sqrt {{\rm{Hz}}} }\;}^{-1}\right) $加速度计
零偏/mg陀螺仪随机
噪声/($\sqrt[{\text{°}} ]{{\rm{h}}}$)陀螺仪
零偏/((°)·h−1)20 (30,−45,26) 0.002 (−0.0009,0.0013,
−0.0008)
下载: 导出CSV
表 3 实验2蒙特卡罗仿真结果
Table 3. Monte Carlo simulation results of exp.2
% 算法 C1*漏检率 虚警率 C2 C3 C4 C5 C6 C7 C8 M1 0 8 82 100 50 0 31 0 M2 0 1 3 21 0 0 0 0
下载: 导出CSV
表 4 实验3蒙特卡罗仿真结果
Table 4. Monte Carlo simulation results of exp.3
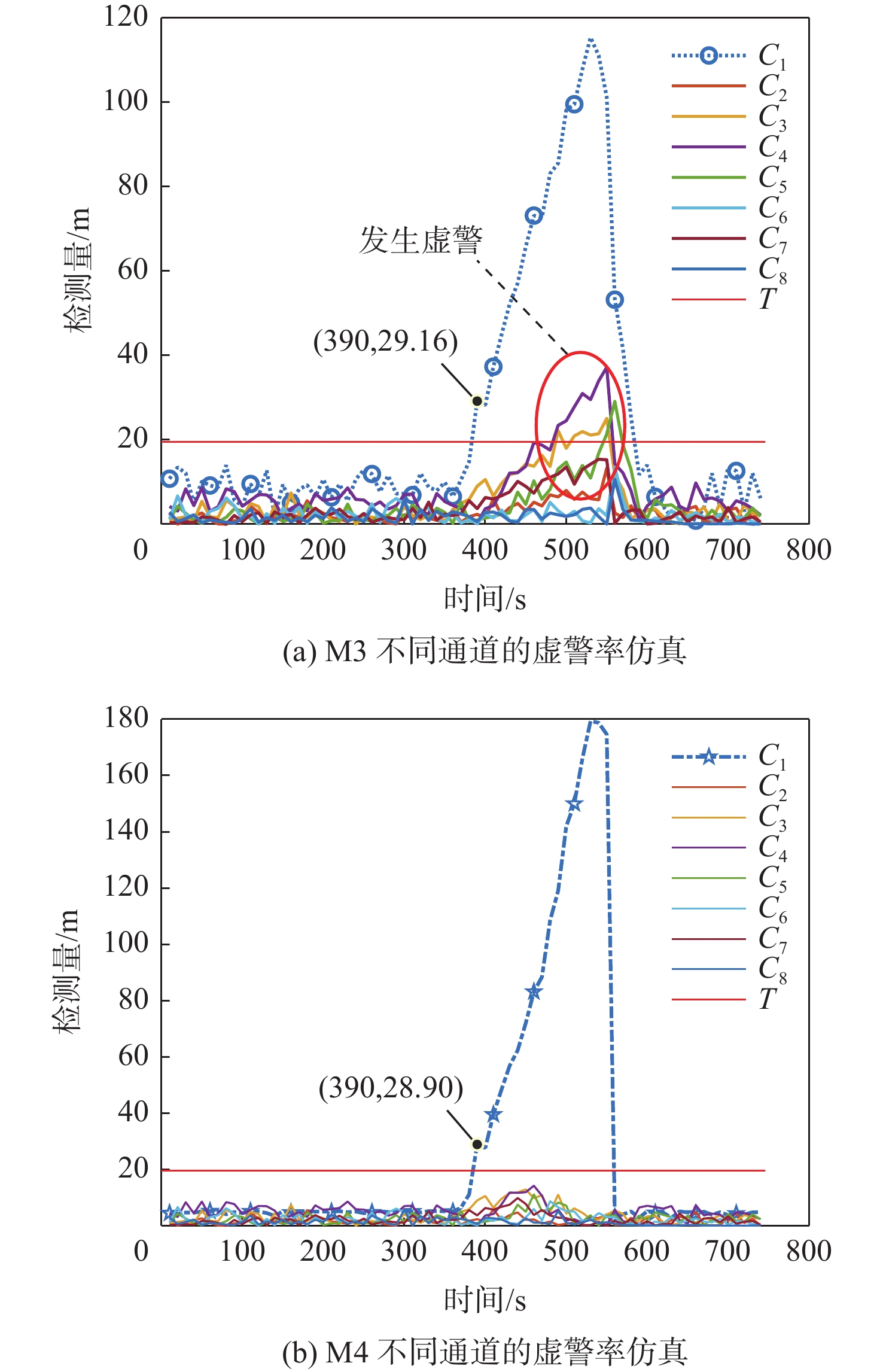
% 算法 漏检率 虚警率 C1* C6* C2 C3 C4 C5 C7 C8 M2 0 0 2 3 13 0 0 3 M3 0 0 7 69 100 43 29 0 M4 0 0 0 2 2 0 0 0
下载: 导出CSV
表 5 通道6的位置误差和均方根对比
Table 5. Position error and RMSE comparison of C6
算法 误差 北向/m 东向/m 地向/m No spoofing 最大值 0.99 0.95 1.46 均值 0.04 0.48 0.07 均方根 0.16 0.52 0.51 M2 最大值 1.39 3.08 6.11 均值 0.21 0.83 0.69 均方根 0.44 1.1 1.92 M3 最大值 2.70 5.71 11.98 均值 0.42 1.23 1.59 均方根 0.86 1.90 3.84 M4 最大值 0.99 1.70 2.63 均值 0.11 0.63 0.26 均方根 0.25 0.73 0.99
下载: 导出CSV
-
[1] 边少锋, 胡彦逢, 纪兵. GNSS欺骗防护技术国内外研究现状及展望[J]. 中国科学:信息科学, 2017, 47(3): 275-287. doi: 10.1360/N112016-00073BIAN S F, HU Y F, JI B. Research status and prospect of GNSS anti-spoofing technology[J]. Scientia Sinica (Informationis), 2017, 47(3): 275-287(in Chinese). doi: 10.1360/N112016-00073 [2] LIU Y, LI S H, FU Q W, et al. Analysis of Kalman filter innovation-based GNSS spoofing detection method for INS/GNSS integrated navigation system[J]. IEEE Sensors Journal, 2019, 19(13): 5167-5178. doi: 10.1109/JSEN.2019.2902178 [3] 张超, 吕志伟, 张伦东, 等. 基于新息速率抗差估计的INS/GNSS组合导航系统欺骗检测算法[J]. 中国惯性技术学报, 2021, 29(3): 328-333. doi: 10.13695/j.cnki.12-1222/o3.2021.03.008ZHANG C, LYU Z W, ZHANG L D, et al. A spoofing detection algorithm for INS/GNSS integrated navigation system based on innovation rate and robust estimation[J]. Journal of Chinese Inertial Technology, 2021, 29(3): 328-333(in Chinese). doi: 10.13695/j.cnki.12-1222/o3.2021.03.008 [4] ZHANG L Y, ZHAO H B, SUN C, et al. Enhanced GNSS spoofing detector via multiple-epoch inertial navigation sensor prediction in a tightly-coupled system[J]. IEEE Sensors Journal, 2022, 22(9): 8633-8647. [5] BRUMBACK B, SRINATH M. A Chi-square test for fault-detection in Kalman filters[J]. IEEE Transactions on Automatic Control, 1987, 32(6): 552-554. doi: 10.1109/TAC.1987.1104658 [6] LIU H Y, ZHENG G, WANG H N, et al. Research on integrity monitoring for integrated GNSS/SINS system[C]//The 2010 IEEE International Conference on Information and Automation. Piscataway: IEEE Press, 2010: 1990-1995. [7] LI X, FANG K, LI X, et al. Fault identification method of GNSS/INS integrated navigation system based on the fusion of chi-square test and multiple solution separation algorithm[C]//China Satellite Navigation Conference Proceedings. Berlin: Springer, 2021: 558-569. [8] LIU Y, LI S H, FU Q W, et al. Impact assessment of GNSS spoofing attacks on INS/GNSS integrated navigation system[J]. Sensors, 2018, 18(5): 1433. [9] ZHONG L N, LIU J Y, LI R B, et al. Approach for detecting soft faults in GPS/INS integrated navigation based on LS-SVM and AIME[J]. Journal of Navigation, 2017, 70(3): 561-579. doi: 10.1017/S037346331600076X [10] 柯晔, 吕志伟, 周玟龙, 等. GNSS/INS紧组合的新息优化抗差估计欺骗检测算法[J]. 中国惯性技术学报, 2022, 30(2): 272-280. doi: 10.13695/j.cnki.12-1222/o3.2022.02.020KE Y, LYU Z W, ZHOU W L, et al. Innovation optimal robust estimation spoofing detection algorithm of tightly coupled GNSS/INS integration[J]. Journal of Chinese Inertial Technology, 2022, 30(2): 272-280(in Chinese). doi: 10.13695/j.cnki.12-1222/o3.2022.02.020 [11] KE Y, LYU Z W, ZHANG C, et al. Tightly coupled GNSS/INS integration spoofing detection algorithm based on innovation rate optimization and robust estimation[J]. IEEE Access, 2022, 23(7): 72444-72457. [12] 戴海发, 卞鸿巍, 马恒, 等. 基于一类SVM的综合导航系统信息故障检测方法[J]. 中国惯性技术学报, 2017, 25(4): 555-560. doi: 10.13695/j.cnki.12-1222/o3.2017.04.023DAI H F, BIAN H W, MA H, et al. Information fault detection for integrated navigation systems using one-class support vector machine[J]. Journal of Chinese Inertial Technology, 2017, 25(4): 555-560(in Chinese). doi: 10.13695/j.cnki.12-1222/o3.2017.04.023 [13] 刘海颖, 冯成涛, 王惠南. 一种惯性辅助卫星导航系统及其完好性检测方法[J]. 宇航学报, 2011, 32(4): 775-780.LIU H Y, FENG C T, WANG H N. Method of inertial aided satellite navigation and its integrity monitoring[J]. Journal of Astronautics, 2011, 32(4): 775-780(in Chinese). [14] 钟丽娜, 刘建业, 李荣冰, 等. 基于LSSVM的惯性/卫星紧组合导航系统缓变故障检测方法[J]. 中国惯性技术学报, 2012, 20(6): 754-758. doi: 10.3969/j.issn.1005-6734.2012.06.027ZHONG L N, LIU J Y, LI R B, et al. Approach for detection of slowly growing errors in INS/GNSS tightly-coupled system based on LS-SVM[J]. Journal of Chinese Inertial Technology, 2012, 20(6): 754-758(in Chinese). doi: 10.3969/j.issn.1005-6734.2012.06.027 [15] 张闯, 赵修斌, 庞春雷, 等. LS-SVM辅助的小幅值及缓变故障检测与容错方法[J]. 中国惯性技术学报, 2019, 27(3): 415-420.ZHANG C, ZHAO X B, PANG C L, et al. LS-SVM assisted fault detection and tolerance method for small-amplitude fault and gradual fault[J]. Journal of Chinese Inertial Technology, 2019, 27(3): 415-420(in Chinese). [16] WANG S Z, ZHAN X Q, ZHAI Y W, et al. Fault detection and exclusion for tightly coupled GNSS/INS system considering fault in state prediction[J]. Sensors, 2020, 20(3): 590-611. [17] YANG Y X, HE H B, XU G C. Adaptively robust filtering for kinematic geodetic positioning[J]. Journal of Geodesy, 2001, 75(2): 109-116. [18] ZHANG C A, ZHAO X B, PANG C L, et al. Improved fault detection method based on robust estimation and sliding window test for INS/GNSS integration[J]. Journal of Navigation, 2020, 73(4): 776-796. doi: 10.1017/S0373463319000778 [19] MEHRKANOON S, SUYKENS J A K. LS-SVM approximate solution to linear time varying descriptor systems[J]. Automatica, 2012, 48(10): 2502-2511. doi: 10.1016/j.automatica.2012.06.095 [20] YING Z, KEONG K C. Fast leave-one-out evaluation and improvement on inference for LS-SVMs[C]//Proceedings of the 17th International Conference on Pattern Recognition. Piscataway: IEEE Press, 2004: 494-497. [21] SUN R, ZHANG W Y, ZHENG J Z, et al. GNSS/INS integration with integrity monitoring for UAV No-fly zone management[J]. Remote Sensing, 2020, 12(3): 524. doi: 10.3390/rs12030524 [22] GROVES P D. Principles of GNSS, inertial, and multisensor integrated navigation systems[J]. IEEE Aerospace and Electronic Systems Magazine, 2015, 30(2): 26-27. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 544
- HTML全文浏览量: 156
- PDF下载量: 18
- 被引次数: 0
