



Kinematic analysis and continuous gait planning of lunar-based equipment in walking state
-
摘要:
针对缓冲行走功能一体的月面探测器构型设计困难、步态分析复杂等问题,提出了一种基于相同支链构型的四足月基装备(LBE)设计分析方法与连续步态规划方案。设计复合功能着陆腿机构及整机多状态位姿;构建LBE在行走状态下的单腿运动学模型,对其进行正逆运动学求解,分析单腿与整机工作空间和运动性能;对LBE整机进行水平月面的连续步态规划,并设计单步足端轨迹,通过动力学仿真,验证LBE行走步态稳定性。仿真结果表明:LBE沿前进方向连续稳定运行,质心竖直方向浮动仅占整器高度的0.24%,俯仰角最大摆动幅度为0.34°,翻滚角最大摆动幅度为0.27°。
Abstract:A design and analysis approach and continuous gait planning scheme of quadruped lunar-based equipment (LBE) based on the same chain configuration are suggested in order to address the issues of challenging configuration design and complex gait analysis of lunar probes with buffer and walking functions. The multi-functional landing leg mechanism and the multi-state pose of the whole machine are designed. Then, the single-leg kinematics model of LBE is constructed. Its forward and inverse kinematics are solved. The workspace and motion performance of the single leg and the whole machine in a walking state are analyzed. Moreover, the continuous gait planning for the LBE on the horizontal lunar surface is carried out, and the one-step trajectory of the foot pad is designed. The motion stability of the landing leg mechanism and the walking gait stability of the LBE are confirmed through the virtual prototype model simulation. The simulation results show that the LBE operates continuously and stably along the forward direction, the vertical floating of the centroid accounts for only 0.24% of the height of the whole device, and the maximum swing amplitude of pitch angle and roll angle are 0.34° and 0.27°.
-
Key words:
- lunar-based equipment /
- configuration design /
- kinematic analysis /
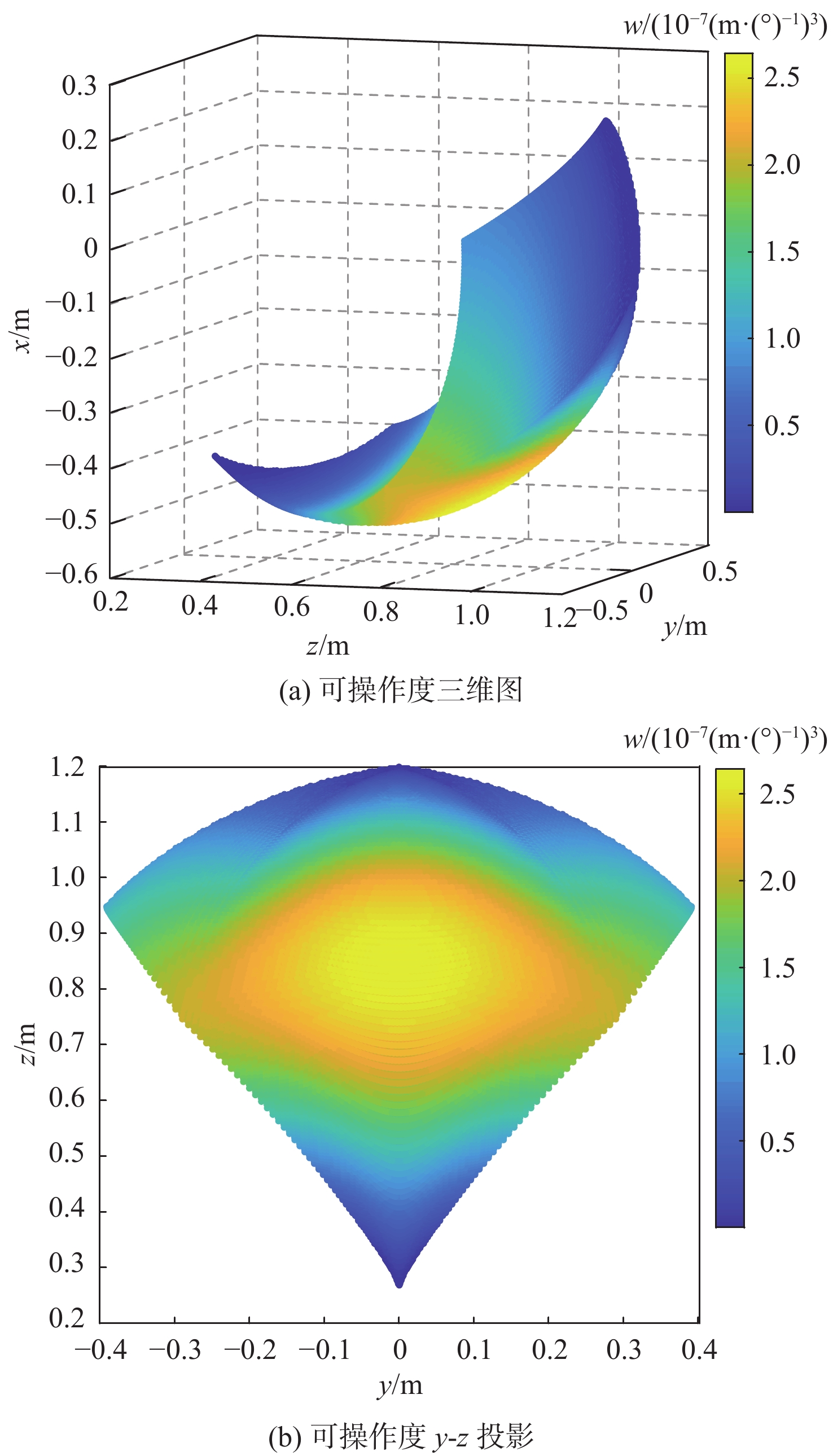
- manipulability /
- gait planning
-

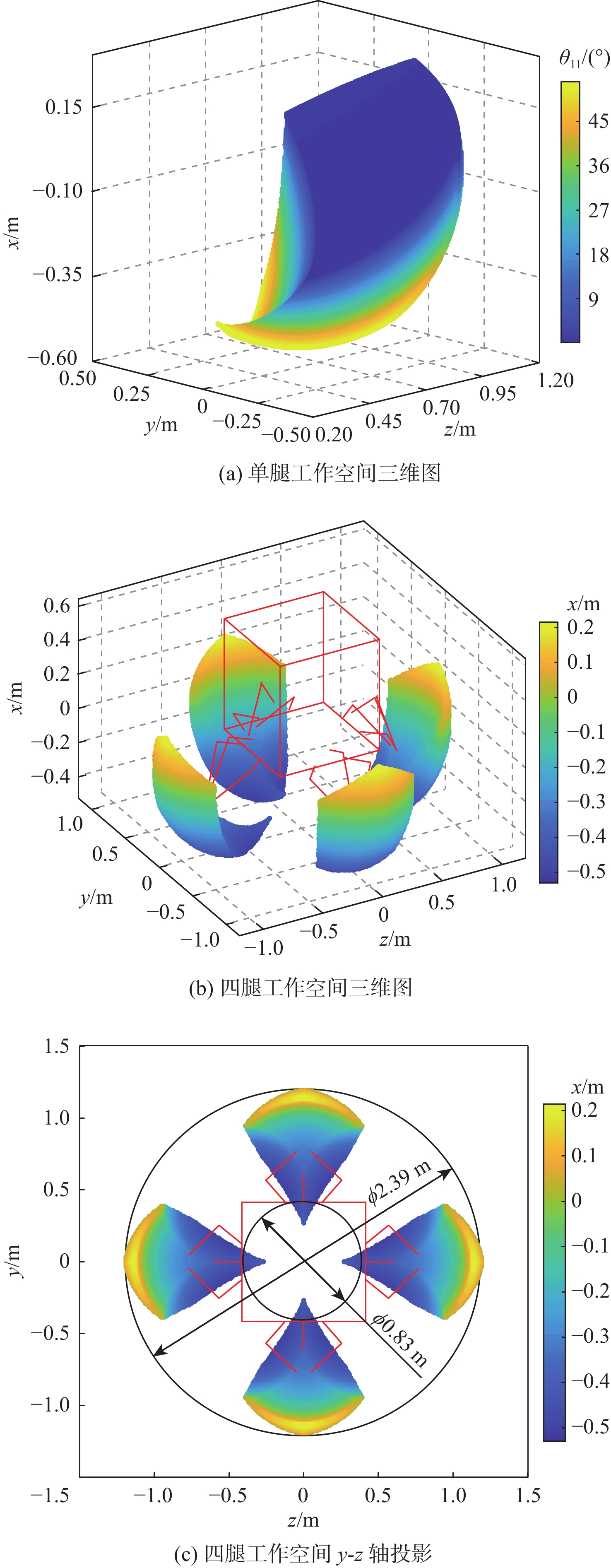
图 8 单腿四向足端相对主体运动范围
Figure 8. Four direction motion range of foot pad relative to main body
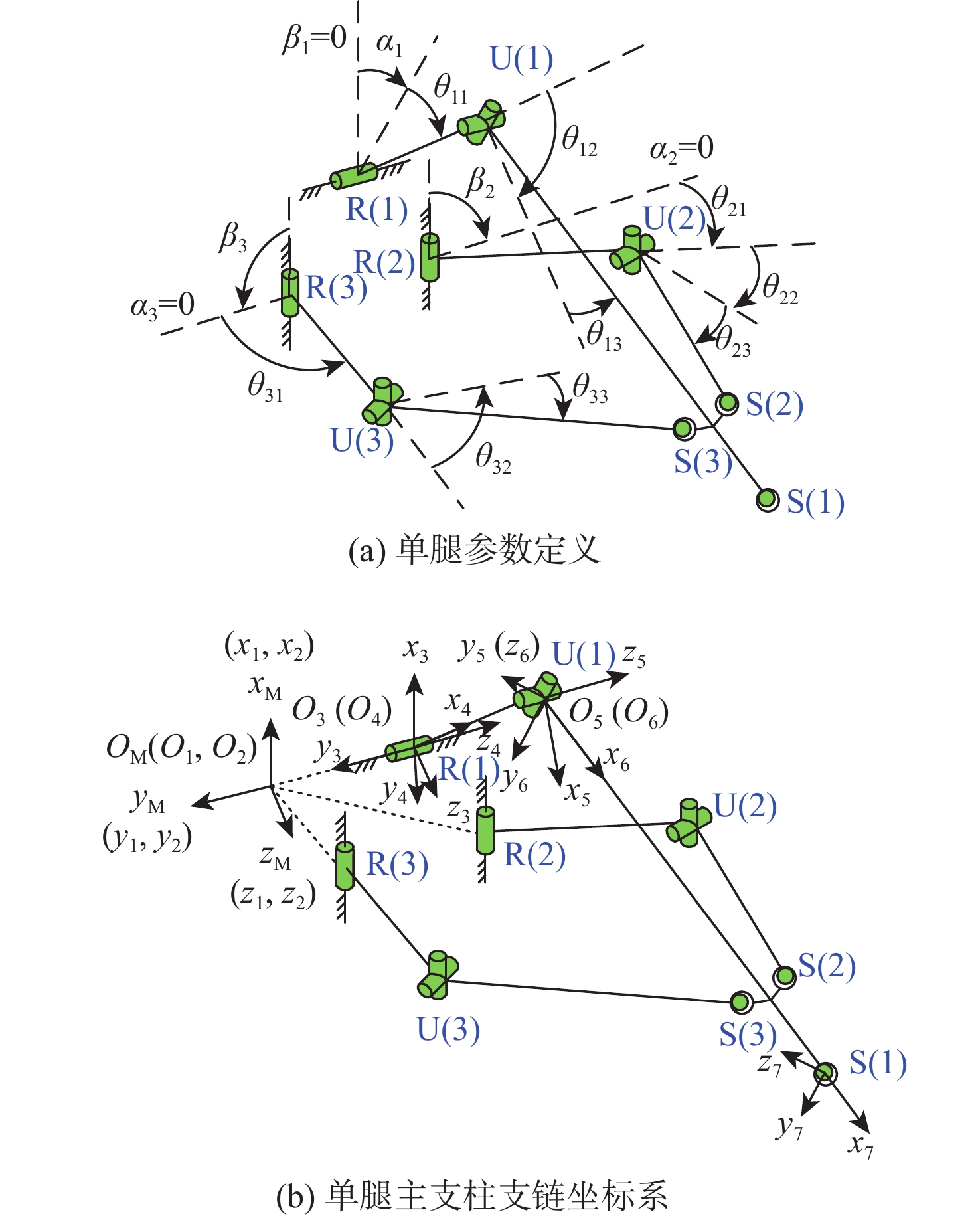
表 1 LBE单腿单支链改进DH参数
Table 1. Improved DH parameter of single chain of single leg for LBE
连杆k 转角${\phi _{k - 1}}$ 偏置${a_{k - 1}}$ 转角${\varphi _k}$ 偏置${d_k}$ 1 0 0 $ {\beta _i} $ 0 2 0 ${r_i}$ 0 ${h_i}$ 3 $ \text{π} /2 $ 0 $ {\alpha _{{i}}} + {\theta _{i1}} $ 0 4 0 $ {l_{i1}} $ $ {\theta _{i2}} $ 0 5 $ {-}\text{π} /2 $ 0 $ {\theta _{i3}} $ 0 6 0 $ {l_{i2}} $ 0 0  下载: 导出CSV
下载: 导出CSV
表 2 支链构型参数
Table 2. Configuration parameters of branched chain
支链 $ \alpha $/(°) $ \beta $/(°) $r$/m $h$/m $ {l_1} $/m $ {l_2} $/m 主支链 36.87 0 0.07 0.415 0.2 0.6 左支链 0 −90 0.125 0.415 0.2 0.35 右支链 0 90 0.125 0.415 0.2 0.35
下载: 导出CSV
-
[1] 孙俊凯, 孙泽洲, 辛鹏飞, 等. 深空着陆探测足式机器人发展综述[J]. 中国机械工程, 2021, 32(15): 1765-1775.SUN J K, SUN Z Z, XIN P F, et al. Review on development of legged robots for deep space landing exploration[J]. China Mechanical Engineering, 2021, 32(15): 1765-1775(in Chinese). [2] 张志贤, 梁鲁, 果琳丽, 等. 轮腿式可移动载人月面着陆器概念设想[J]. 载人航天, 2016, 22(2): 202-209.ZHANG Z X, LIANG L, GUO L L, et al. Conceptual design of manned lunar lander with wheel-legged mobile system[J]. Manned Spaceflight, 2016, 22(2): 202-209(in Chinese). [3] 路达, 刘金国, 高海波. 星球表面着陆巡视一体化探测机器人研究进展[J]. 航空学报, 2021, 42(1): 100-116.LU D, LIU J G, GAO H B. Integrated exploration robots for planetary surface landing and patrolling: A review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 100-116(in Chinese). [4] BIRCKENSTAEDT B, HOPKINS J, KUTTER B, et al. Lunar lander configurations incorporating accessibility, mobility, and centaur cryogenic propulsion experience: AIAA 2006-7284[R]. Reston: AIAA, 2006. [5] HOWE A S. A modular habitation system for human planetary and space exploration[C]//Proceedings of the 45th International Conference Environmental Systems. Emmaus: ICES, 2015. [6] 梁鲁, 张志贤, 果琳丽, 等. 可移动式月球着陆器在载人月球探测活动中的任务分析[J]. 载人航天, 2015, 21(5): 472-478.LIANG L, ZHAGN Z X, GUO L L, et al. Task analysis of mobile lunar lander in crewed lunar exploration missions[J]. Manned Spaceflight, 2015, 21(5): 472-478(in Chinese). [7] HUNG A, HOWE A S. A kit-of-parts approach to pressure vessels for planetary surface construction: AIAA 2003-6281[R]. Reston: AIAA, 2003. [8] LIN R F, GUO W Z. Novel design of a family of legged mobile lander[C]//Proceedings of the Intelligent Robotics and Applications. Berlin: Springer, 2017: 261-272. [9] LIN R F, GUO W Z, Chen X B, et al. Type synthesis of legged mobile landers with one passive limb using the singularity property[J]. Robotica, 2018, 36(12): 1-21. [10] LIN R F, GUO W Z. Novel design of a family of legged mobile landers based on decoupled landing and walking functions[J]. Journal of Mechanical Science and Technology, 2020, 34(9): 3815-3822. doi: 10.1007/s12206-020-0832-x [11] HAN Y C, GUO W Z, PENG Z K, et al. Dimensional synthesis of the reconfigurable legged mobile lander with multi-mode and complex mechanism topology[J]. Mechanism and Machine Theory, 2020, 155: 104097. [12] HAN Y C, GUO W Z. A computable framework to efficiently design both current and robotic legged landers for extraterrestrial exploration mission[J]. Journal of Mechanical Design, 2022, 144(1): 014501. [13] HAN Y C, GUO W Z, ZHAO D H, et al. Multi-mode unified modeling and operation capability synergistic evaluation for the reconfigurable legged mobile lander[J]. Mechanism and Machine Theory, 2022, 171: 104714. doi: 10.1016/j.mechmachtheory.2021.104714 [14] 刘志, 周杰, 靳宗向, 等. 一种可行走的月球软着陆机构: CN104943875B[P]. 2016-11-23.LIU Z, ZHOU J, JIN Z X, et al. A walking lunar soft landing mechanism: CN104943875B[P]. 2016-11-23(in Chinese). [15] 杨建中, 高峰, 李新立, 等. 一种具有着陆缓冲功能的行走机器人: CN105127975B[P]. 2017-04-19.YANG J Z, GAO F, LI X L, et al. A kind of walking and buffering robot with landing function: CN105127975B[P]. 2017-04-19 (in Chinese). [16] 佟振鸣. 移动式着陆探测机器人构型设计与行走规划研究[D]. 上海: 上海交通大学, 2016: 15-49.TONG Z M. On configuration design and gait planning of mobile exploration lander[D]. Shanghai: Shanghai Jiaotong University, 2016: 15-49(in Chinese). [17] 高峰, 尹科, 孙乔, 等. 探月足式飞跃机器人设计与控制[J]. 飞控与探测, 2020, 3(4): 1-7.GAO F, YIN K, SUN Q, et al. Design and control of legged leaping robot in lunar exploration[J]. Flight Control & Detection, 2020, 3(4): 1-7(in Chinese). [18] 蔡旭. 轮腿式可重复着陆巡视机器人的机构设计与运动规划[D]. 上海: 上海交通大学, 2020: 23-33.CAI X. Mechanism design and motion planning of a wheel-legged repetitive landing inspection robot[D]. Shanghai: Shanghai Jiaotong University, 2020: 23-33(in Chinese). [19] 贾山, 周向华, 陈金宝, 等. 缓冲/行走一体化着陆器运动学研究与步态规划[J]. 宇航学报, 2021, 42(4): 467-476.JIA S, ZHOU X H, CHEN J B, et al. Kinematics research and gait planning of buffering/walking integrated lander[J]. Journal of Astronautics, 2021, 42(4): 467-476(in Chinese). [20] 周壮壮. 行走式着陆探测器复位机构故障状态下行走能力研究[D]. 哈尔滨: 哈尔滨工业大学, 2020: 13-20.ZHOU Z Z. Research on walking ability under the failure of reset mechanism of walking landing probe[D]. Harbin: Harbin Institute of Technology, 2020: 13-20(in Chinese). [21] JOSHI S A, TSAI L W. Jacobian analysis of limited-DOF parallel manipulators[J]. Journal of Mechanical Design, 2002, 124(2): 254-258. doi: 10.1115/1.1469549 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 105
- HTML全文浏览量: 47
- PDF下载量: 22
- 被引次数: 0
