



Nonlinear variable damping integral sliding mode control for electro-hydrostatic actuator
-
摘要:
对于电动静液作动器(EHA),传统滑模控制器存在加速度信息难以获取,参数不易整定和控制信号抖振等问题,从而造成控制器很难应用于实际。针对以上问题,利用奇异摄动理论对EHA数学模型进行合理的降阶,从而使控制器设计避免了使用加速度信息。在此基础上,利用降阶模型设计了一种新型非线性变阻尼积分滑模控制器(NSMC),该控制器可根据位置控制误差实现系统阻尼比由欠阻尼到过阻尼的自适应调节,能有效提高位置阶跃调节性能。设计了一种基于滤波器的不确定项估计器对EHA中存在的参数不确定性和外部扰动进行实时估计并补偿。滑模面积分项的引入和不确定项估计器的使用,一方面使控制器中无需使用切换函数,实现了EHA的无抖振滑模控制,另一方面使系统整个动态过程完全表现为滑动模态,从而可根据EHA控制指标直接整定滑模面参数,大大简化了参数整定过程。同时利用Lyapunov 稳定性理论对整个闭环系统和滑模面的稳定性进行了详细分析。分别与PI控制器、传统滑模控制器(SMC)和传统变阻尼滑模控制器(DVSMC)进行了详细的仿真分析比较,仿真结果表明NSMC能有效提高EHA位置跟踪性能和增强对参数不确定性和外部扰动的鲁棒性。
Abstract:For electro-hydrostatic actuator (EHA), the traditional sliding mode controller has many defects, such as control signal chattering, difficulty in acceleration information acquirement and controller parameters tuning, which make the controller difficult to be applied in practice. To solve the above problems, the reduced order mathematical model of EHA is obtained reasonably by using singular perturbation theory, which result in avoiding the use of acceleration information. On this basis, a novel nonlinear variable damping integral sliding mode controller (NSMC) is synthesized by employing the reduced order model. NSMC can adaptively adjust the system damping ratio from underdamping to overdamping according to the position control error, and can effectively improve the position step performance. Besides, filter-based uncertainty estimator is designed to estimate and compensate the parameter uncertainties and external disturbances of EHA in real time. Due to the introduction of sliding mode surface integral term and uncertainty estimator, switching function is unnecessary, on the one hand, the free-chattering sliding control can be achieved. On the other hand, the whole dynamic process is determined directly by the dynamic of sliding mode surface, so that sliding mode surface parameters can be tuned directly according to EHA’s control performance index, which greatly simplifies the parameters tuning process. Meanwhile, the stability of the whole closed-loop system and sliding mode surface is proved via Lyapunov stability theory. Finally, by comparing respectively with PI, conventional sliding mode (SMC) and damping variable sliding mode controller (DVSMC), the simulation results indicated that NSMC can effectively improve EHA position tracking performance and enhance the robustness of parameter uncertainty and external disturbance.
-

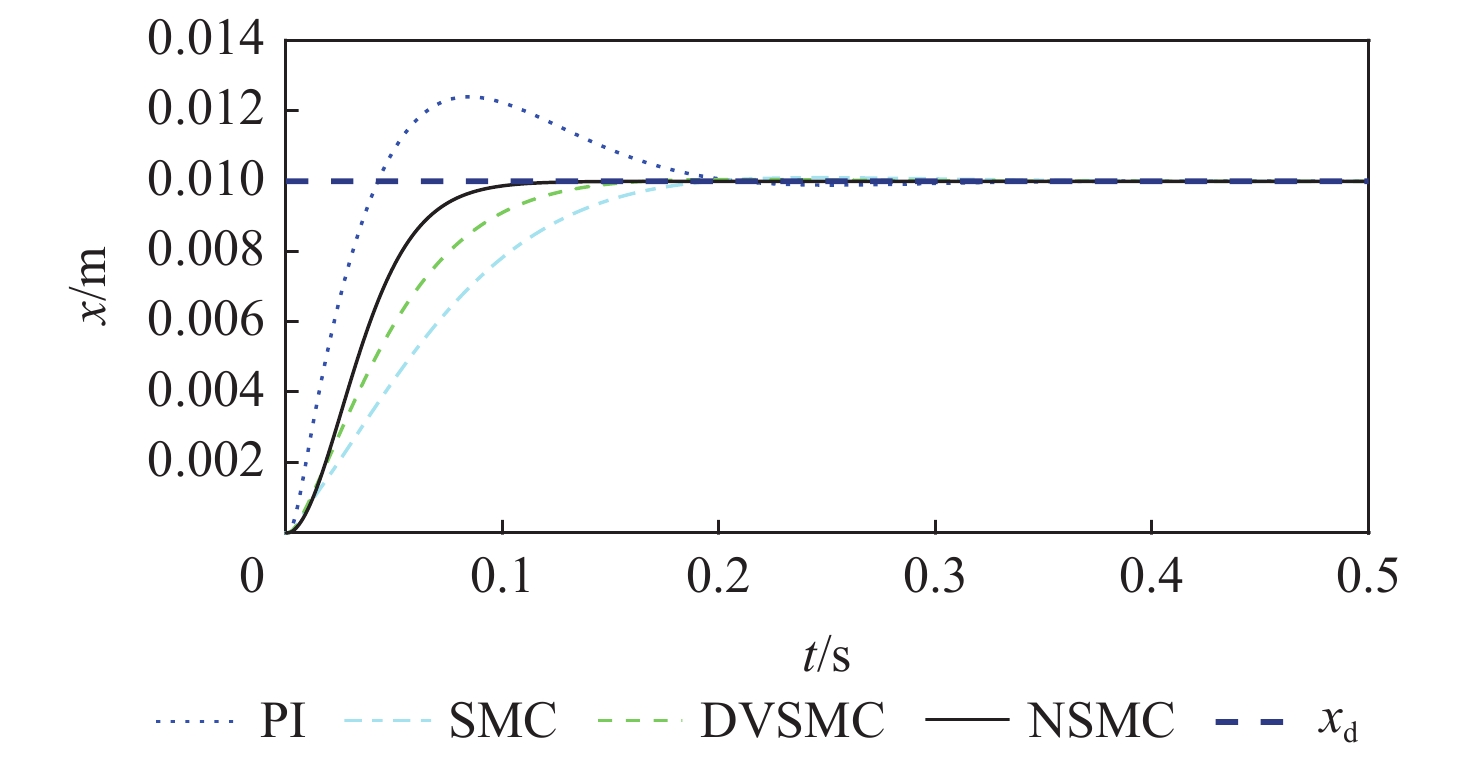
图 3 $ {x_{\rm{d}}} = 0.01\;{\rm{m}} $时位置阶跃响应对比曲线
Figure 3. Position step response comparison curves with $ {x_{\rm{d}}} = 0.01\;{\rm{m}} $
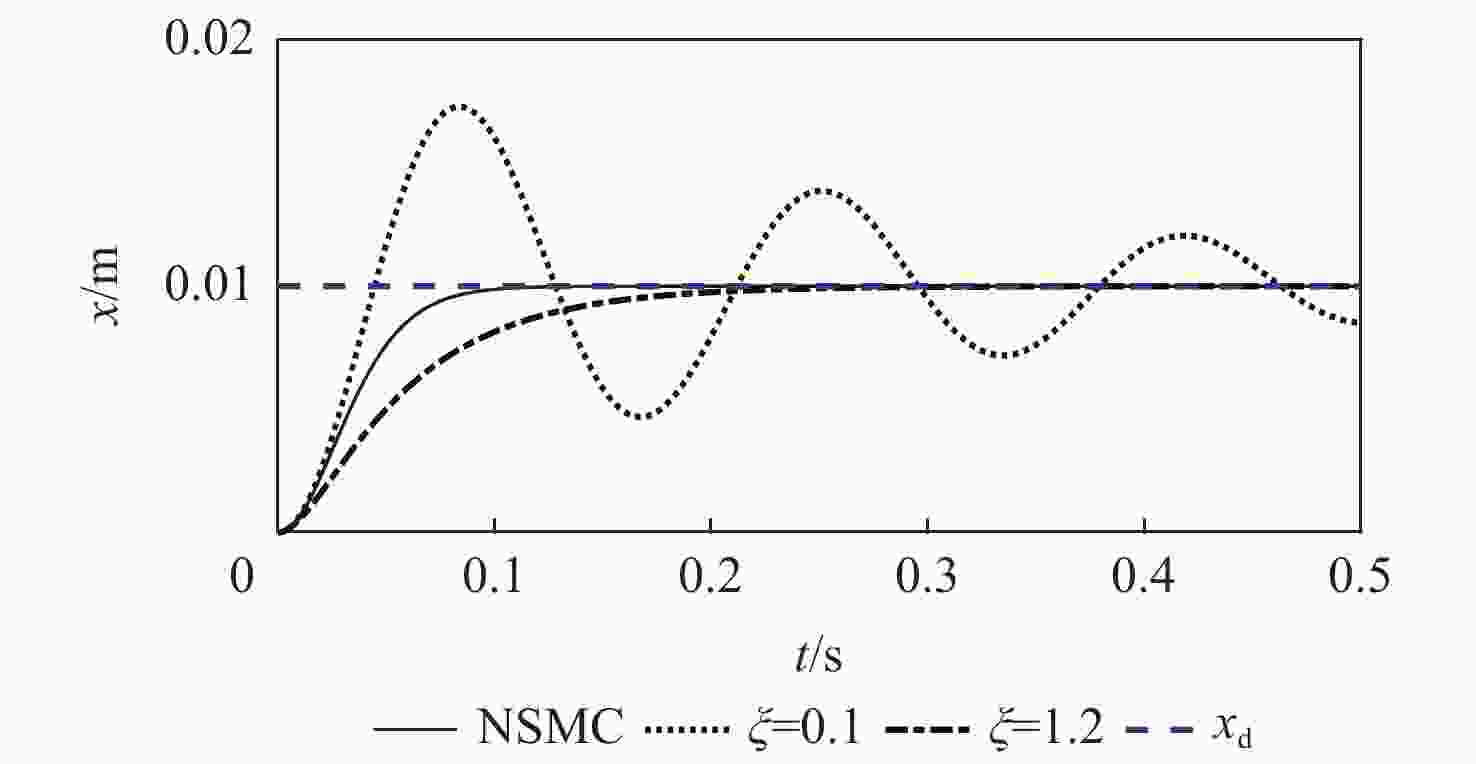
图 4 $ {x_{\rm{d}}} = 0.01\;{\rm{m}} $时NSMC变阻尼与定阻尼位置阶跃响应对比曲线
Figure 4. Position step response comparison curves under NSMC variable damping and constant damping with $ {x_{\rm{d}}} = 0.01\;{\rm{m}} $

图 5 $ {x_{\mathrm{d}}} = 0.1\;{\mathrm{m}} $,1000 N阶跃外负载力时位置阶跃性能对比曲线
Figure 5. Position step performance comparison curves under 1000 N step external load force with $ {x_{\mathrm{d}}} = 0.1\;{\mathrm{m}} $
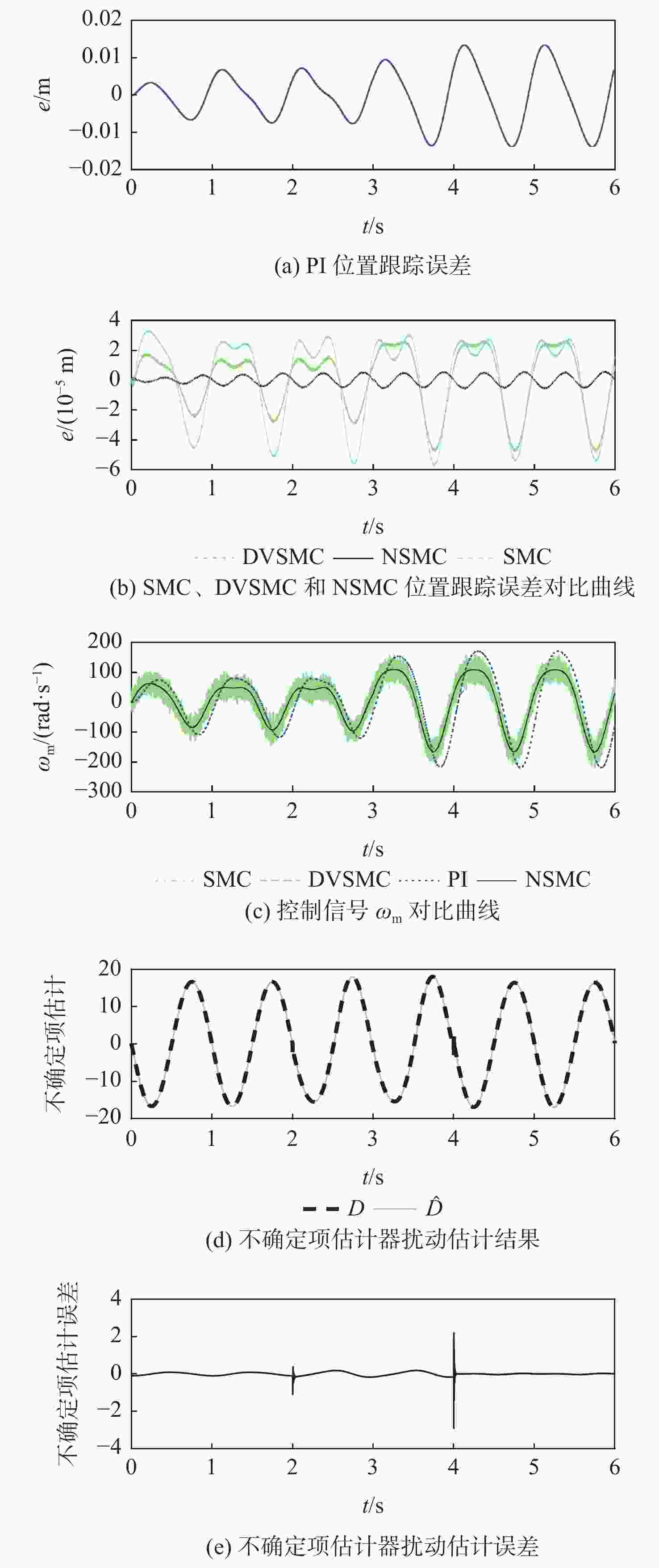
图 6 $ {x_{\rm{d}}} $为时变信号,存在复杂时变扰动时位置跟踪性能对比曲线
Figure 6. Position step performance comparison curves under complex time-varying disturbance when $ {x_{\rm{d}}} $ is time-varying sinusoidal signal
表 1 仿真参数
Table 1. Simulation parameters
参 数 数 值 液压缸活塞直径/$ \mathrm{m} $ 0.066 活塞杆直径/$ \mathrm{m} $ 0.045 活塞行程/$ \mathrm{m} $ 0.2 液压缸和IEHP总泄漏系数/$ {({10}^{-11}\mathrm{m}}^{3} $·s−1·Pa−1) 2.1 油液弹性模量/(108 N·m−2) 6.86 液压缸初始总体积$ /({10}^{-4}\;{\mathrm{m}}^{3}) $ 3 液压缸和负载总黏性摩擦系数/(N·m−1·s) 1100 活塞、活塞杆和负载质量/$({10}^{-6}\;\mathrm{k}\mathrm{g})$ 60 IEHP排量/(m−3·rad−1) 1.59 IEHP总粘性摩擦系数/(N·m·rad−1·s) 0.002 IEHP定子电阻$ /\mathrm{\Omega } $ 0.2 IEHP d、q轴等效电感/H 0.00187 IEHP 极对数 2 IEHP 永磁体磁链$ / $Wb 0.25 IEHP 转动惯量/kg·m2 0.0012 IEHP最高转速/(rad$ \cdot $s−1) 314  下载: 导出CSV
下载: 导出CSV
-
[1] 付永领, 韩旭, 杨荣荣, 等. 电动静液作动器设计方法综述[J]. 北京航空航天大学学报, 2017, 43(10): 1939-1952. doi: 10.13700/j.bh.1001-5965.2017.0195FU Y L, HAN X, YANG R R, et al. Review on design method of electro-hydrostatic actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 1939-1952 (in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0195 [2] MARÉ J C, FU J. Review on signal-by-wire and power-by-wire actuation for more electric aircraft[J]. Chinese Journal of Aeronautics, 2017, 30(3): 857-870. doi: 10.1016/j.cja.2017.03.013 [3] ALLE N, HIREMATH S S, MAKARAM S, et al. Review on electro hydrostatic actuator for flight control[J]. International Journal of Fluid Power, 2016, 17(2): 125-145. doi: 10.1080/14399776.2016.1169743 [4] 张英臣, 祁晓野. 基于PID和滑模控制的电动静液作动器的研究[J]. 机床与液压, 2017, 45(21): 122-126.ZHANG Y C, QI X Y. Study of electro-hydraulic actuator based on PID and sliding mode control[J]. Machine Tool & Hydraulics, 2017, 45(21): 122-126 (in Chinese). [5] EL SAYED M A, HABIBI S. Inner-loop control for electro-hydraulic actuation systems[J]. Journal of Dynamic Systems, Measurement, and Control, 2012, 134(1): 014501. doi: 10.1115/1.4001338 [6] AHN K K, NAM D N C, JIN M L. Adaptive backstepping control of an electrohydraulic actuator[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(3): 987-995. doi: 10.1109/TMECH.2013.2265312 [7] SUN W C, GAO H J, YAO B. Adaptive robust vibration control of full-car active suspensions with electrohydraulic actuators[J]. IEEE Transactions on Control Systems Technology, 2013, 21(6): 2417-2422. doi: 10.1109/TCST.2012.2237174 [8] GE Y W, YANG X W, DENG W X, et al. RISE-based composite adaptive control of electro-hydrostatic actuator with asymptotic stability[J]. Machines, 2021, 9(9): 181. doi: 10.3390/machines9090181 [9] WANG M K, WANG Y, FU Y L, et al. Experimental investigation of an electro-hydrostatic actuator based on the novel active compensation method[J]. IEEE Access, 2020, 8: 170635-170649. doi: 10.1109/ACCESS.2020.3021104 [10] ZHANG H, LIU X T, WANG J M, et al. Robust H∞ sliding mode control with pole placement for a fluid power electrohydraulic actuator (EHA) system[J]. The International Journal of Advanced Manufacturing Technology, 2014, 73(5-8): 1095-1104. doi: 10.1007/s00170-014-5910-8 [11] 郭新平, 汪成文, 刘华, 等. 基于扩张状态观测器的泵控电液伺服系统滑模控制[J]. 北京航空航天大学学报, 2020, 46(6): 1159-1168. doi: 10.13700/j.bh.1001-5965.2019.0418GUO X P, WANG C W, LIU H, et al. Extended-state-observer based sliding mode control for pump-controlled electro-hydraulic servo system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1159-1168 (in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0418 [12] 李小虎, 王孙安, 张育林, 等. 基于反馈变结构控制电动静液作动器的研究[J]. 机床与液压, 2008, 36(12): 71-74.LI X H, WANG S A, ZHANG Y L, et al. Study on sliding mode control based on feedback for electro-hydrostatic actuator[J]. Machine Tool & Hydraulics, 2008, 36(12): 71-74 (in Chinese). [13] LIN Y, SHI Y, BURTON R. Modeling and robust discrete-time sliding-mode control design for a fluid power electrohydraulic actuator (EHA) system[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 1-10. doi: 10.1109/TMECH.2011.2160959 [14] WANG S, BURTON R, HABIBI S. Sliding mode controller and filter applied to an electrohydraulic actuator system[J]. Journal of Dynamic Systems, Measurement, and Control, 2011, 133(2): 024504. doi: 10.1115/1.4003206 [15] WANG S, HABIBI S, BURTON R, et al. Sliding mode control for a model of an electrohydraulic actuator system with discontinuous nonlinear friction[C]//2006 American Control Conference. Piscataway: IEEE Press, 2006, 1-2: 780. [16] ALEMU A E, FU Y L. Sliding mode control of electro-hydrostatic actuator based on extended state observer[C]//2017 29th Chinese Control and Decision Conference (CCDC). Piscataway: IEEE Press, 2017: 758-763. [17] LEE L M, PARK P H , KIM K J S. Design and experimental evaluation of a robust position controller for an electro- hydrostatic actuator using adaptive anti-windup sliding mode scheme[J]. The Scientific World Journal, 2013, 2013: 590708. [18] 张振, 李海军, 诸德放. EHA反馈线性化最优滑模面双模糊滑模控制[J]. 北京航空航天大学学报, 2016, 42(7): 1398-1405. doi: 10.13700/j.bh.1001-5965.2015.0454ZHANG Z, LI H J, ZHU D F. Double fuzzy sliding mode control for EHA based on feedback linearization optimal sliding surface[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7): 1398-1405 (in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0454 [19] YANG R R, FU Y L, ZHANG L, et al. A novel sliding mode control framework for electrohydrostatic position actuation system[J]. Mathematical Problems in Engineering, 2018, 2018: 7159891. [20] 杨荣荣. 基于新型电液泵的电静液作动系统控制策略研究[D]. 北京: 北京航空航天大学, 2019: 76-77.YANG R R. Research on control strategy for electro-hydrostatic actuation system based on a novel integrated electrohydraulic pump[D]. Beijing: Beijing University of Aeronautics and Astronautics, 2019: 76-77 (in Chinese). [21] 王明康, 付永领, 赵江澳, 等. 电动静液作动器的新型变阻尼级联滑模控制[J]. 北京航空航天大学学报, 2021, 47(8): 1612-1618. doi: 10.13700/j.bh.1001-5965.2020.0252WANG M K, FU Y L, ZHAO J A, et al. Novel damping-variable sliding mode cascade control for electro-hydrostatic actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1612-1618 (in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0252 [22] WANG M K, WANG Y, YANG R R, et al. A sliding mode control strategy for an ElectroHydrostatic actuator with damping variable sliding surface[J]. Actuators, 2020, 10(1): 3. doi: 10.3390/act10010003 [23] 付永领, 李祝锋, 薛晶, 等. 一种带转速反馈的永磁轴向柱塞式电液泵: CN203423578U[P]. 2015-08-26.FU Y L, LI Z F, XUE J, et al. Permanent magnet radial plunger type electro-hydraulic pump with rotating speed feedback: CN203423578U[P]. 2015-08-26 (in Chinese). [24] PONOMAREV P, POLIKARPOVA M, HEINIKAINEN O, et al. Design of integrated electro-hydraulic power unit for hybrid mobile working machines[C]//Proceedings of the 14th European Conference on Power Electronics and Applications (EPE2011). Piscataway: IEEE Press, 2011: 1-10. [25] KHALIL H K. Nonlinear systems[M]. 3rded. Upper Saddle River, NJ: Prentice Hall, 2002: 423-430. -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 140
- HTML全文浏览量: 30
- PDF下载量: 8
- 被引次数: 0
