



-
摘要:
为解决区域搜索和目标跟踪2种任务协同时对传感器资源的竞争问题,提出了一种多传感器调度方法。针对双任务协同背景,将传感器调度转换为多目标优化问题,以搜索性能和跟踪性能为优化目标建立了目标函数;建立了区域搜索模型,考虑目标的新生、消亡和转移,将未被发现目标的更新过程建立为非齐次泊松过程,提出以漏警损失量化区域搜索性能;建立了目标跟踪模型,引入后验克拉美罗下界(PCRLB)量化未来时刻的跟踪性能;针对最优调度方案求解,在传统多目标差分进化算法的基础上,引入混沌映射理论和双种群协同方法,提出了混沌映射-多目标协同差分进化算法(CM-MOCDEA)以提高寻优能力。仿真实验验证了所提优化算法能够兼顾收敛性和多样性,具有较强的全局搜索能力;所提方法能够有效分配传感器资源完成区域搜索和目标跟踪任务,从而获得较高的作战收益。
Abstract:A multi-sensor scheduling method is proposed to address the competition of sensor resources during simultaneous execution of area search tasks and target tracking tasks. Firstly, for the dual-task cooperation, sensor scheduling is transformed into a multi-objective optimization problem, and the search performance and tracking performance are taken as the optimization objectives. Secondly, the area search model is established, in which the process of updated undetected targets is built as a non-homogeneous Poisson process, considering the rebirth, extinction, and transfer of targets. The missed alarm loss is proposed to quantify the search performance. Then, the target tracking model is established, and the posterior Carmér-Rao lower bound (PCRLB) is introduced to quantify the tracking performance in the future. Finally, to search the best scheduling scheme, a chaotic map multi-objective cooperative differential evolution algorithm (CM-MOCDEA) is proposed, utilizing the chaotic mapping theory and dual population cooperative method based on the traditional multi-objective differential evolution algorithm. Simulation results show that the proposed algorithm can consider both convergence and diversity, and has a strong global search ability. The proposed scheduling method can also effectively allocate sensor resources to complete area search and target tracking tasks, thus achieving higher operational gains.
-
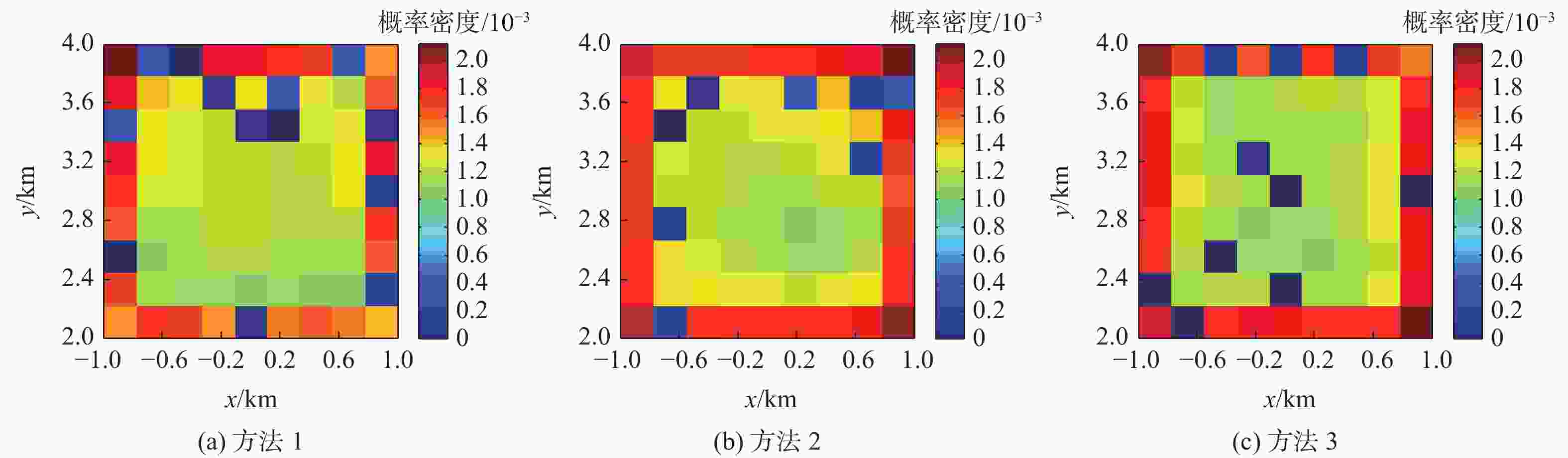
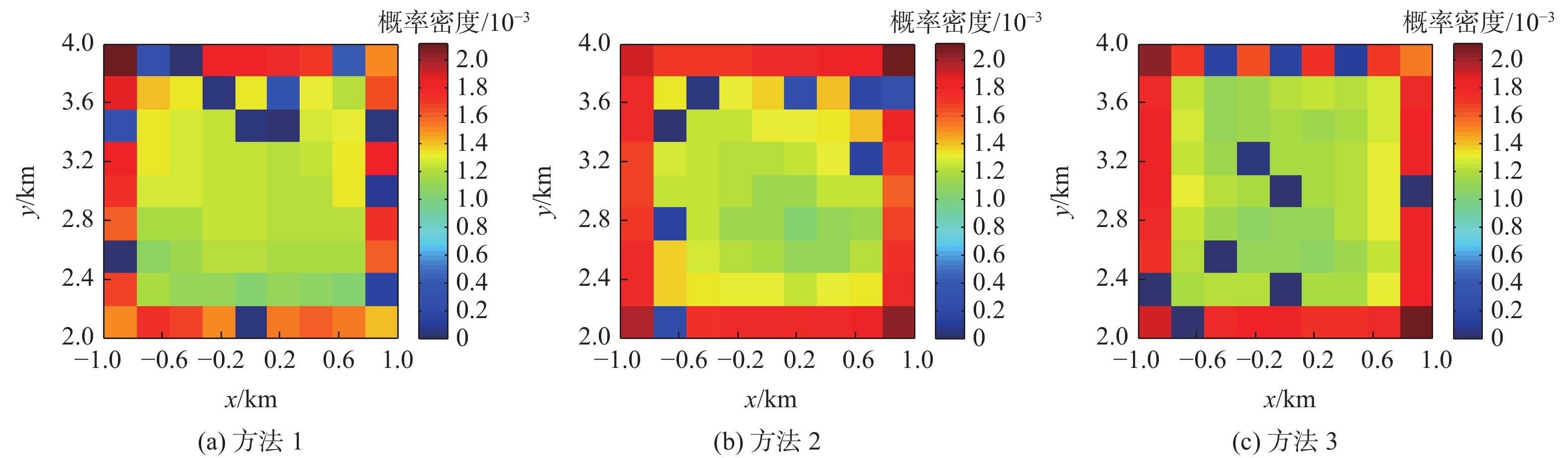
图 9 第30 s时监视区域未被发现目标的密度
Figure 9. Density of undetected targets in monitoring area at 30 s
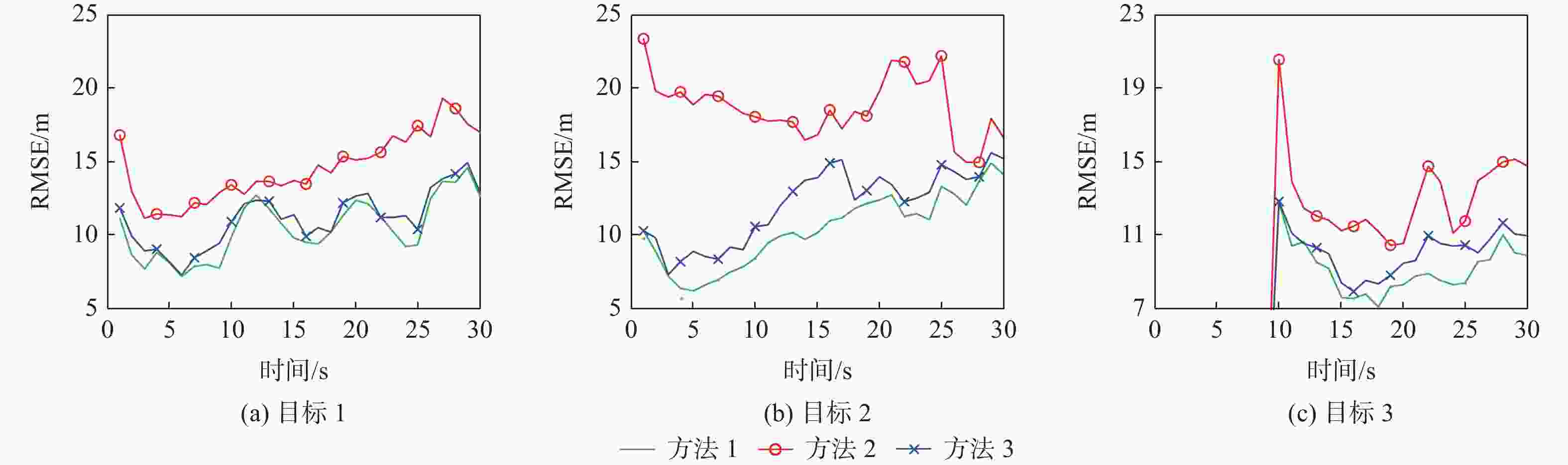
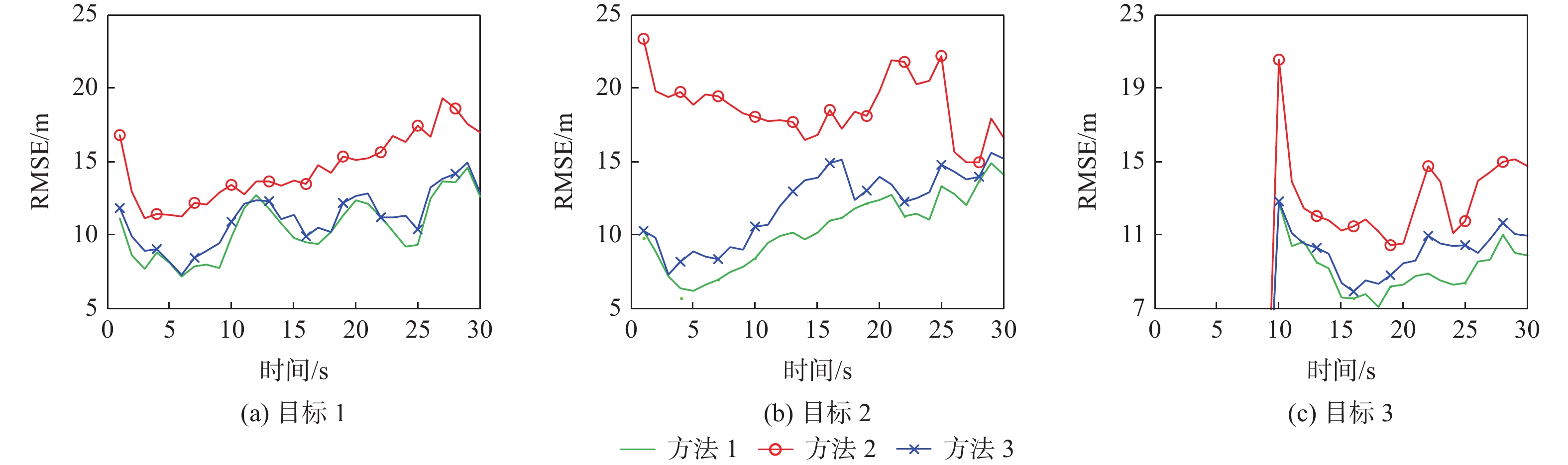
图 10 不同调度方法下对各目标的RMSE
Figure 10. RMSE of each target with different scheduling methods
表 1 测试函数的相关参数
Table 1. Relevant parameters of test function
函数
名称函数形式 变量
个数取值
范围ZDT1 $ \begin{gathered} {f_1}\left( {\boldsymbol{x}} \right) = {x_1},{f_2}\left( {\boldsymbol{x}} \right) = g\left( {\boldsymbol{x}} \right)\left[ {1 - \sqrt {{{{x_1}} \mathord{\left/ {\vphantom {{{x_1}} {g\left( {\boldsymbol{x}} \right)}}} \right. } {g\left( {\boldsymbol{x}} \right)}}} } \right] \\ g\left( {\boldsymbol{x}} \right) = 1 + {{9\left( {\sum\limits_{i = 2}^h {{x_i}} } \right)} \mathord{\left/ {\vphantom {{9\left( {\sum\limits_{i = 2}^h {{x_i}} } \right)} {\left( {h - 1} \right)}}} \right. } {\left( {h - 1} \right)}} \\ \end{gathered} $ 30 $\left[ {0,1} \right]$ ZDT2 $ \begin{gathered} {f_1}\left( {\boldsymbol{x}} \right) = {x_1},{f_2}\left( {\boldsymbol{x}} \right) = g\left( {\boldsymbol{x}} \right)\left\{ {1 - {{\left[ {\sqrt {{{{x_1}} \mathord{\left/ {\vphantom {{{x_1}} {g\left( {\boldsymbol{x}} \right)}}} \right. } {g\left( {\boldsymbol{x}} \right)}}} } \right]}^2}} \right\} \\ g\left( {\boldsymbol{x}} \right) = 1 + {{9\left( {\sum\limits_{i = 2}^h {{x_i}} } \right)} \mathord{\left/ {\vphantom {{9\left( {\sum\limits_{i = 2}^h {{x_i}} } \right)} {\left( {h - 1} \right)}}} \right. } {\left( {h - 1} \right)}} \\ \end{gathered} $ 30 $\left[ {0,1} \right]$ ZDT6 $ \begin{gathered} {f_1}\left( {\boldsymbol{x}} \right) = 1 - \exp \left( { - 4{x_1}} \right){\sin ^6}\left( {6 \text{π} {x_1}} \right), \\ {f_2}\left( {\boldsymbol{x}} \right) = g\left( {\boldsymbol{x}} \right)\left\{ {1 - {{\left[ {{{{f_1}\left( {\boldsymbol{x}} \right)} \mathord{\left/ {\vphantom {{{f_1}\left( {\boldsymbol{x}} \right)} {g\left( {\boldsymbol{x}} \right)}}} \right. } {g\left( {\boldsymbol{x}} \right)}}} \right]}^2}} \right\} \\ g\left( {\boldsymbol{x}} \right) = 1 + 9{\left[ {{{\left( {\sum\limits_{i = 2}^h {{x_i}^2} } \right)} \mathord{\left/ {\vphantom {{\left( {\sum\limits_{i = 2}^h {{x_i}^2} } \right)} {\left( {h - 1} \right)}}} \right. } {\left( {h - 1} \right)}}} \right]^{0.25}} \\ \end{gathered} $ 10 $\left[ {0,1} \right]$  下载: 导出CSV
下载: 导出CSV
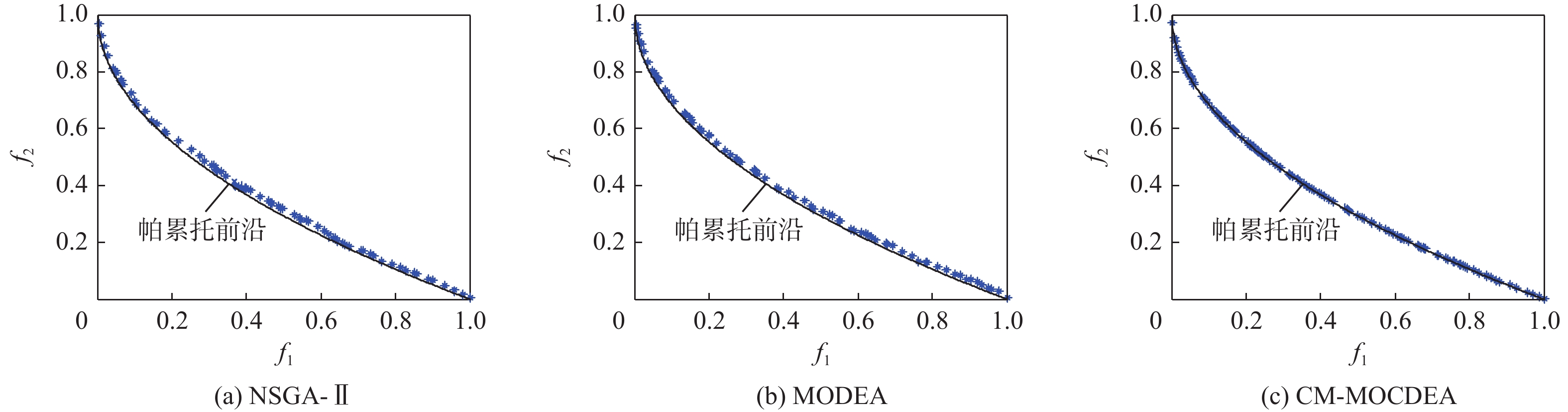
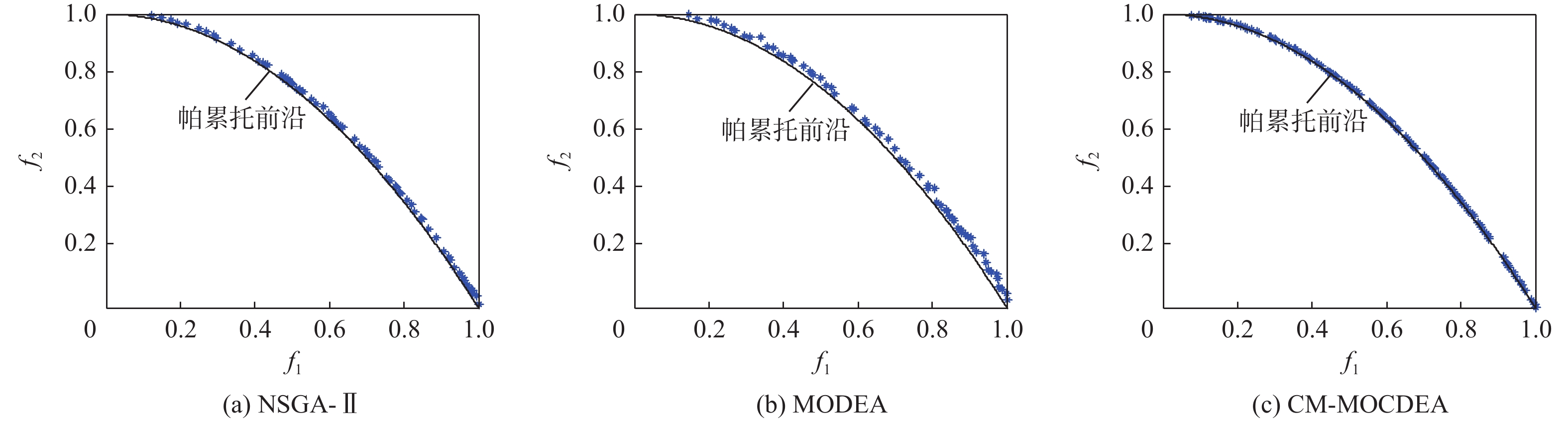
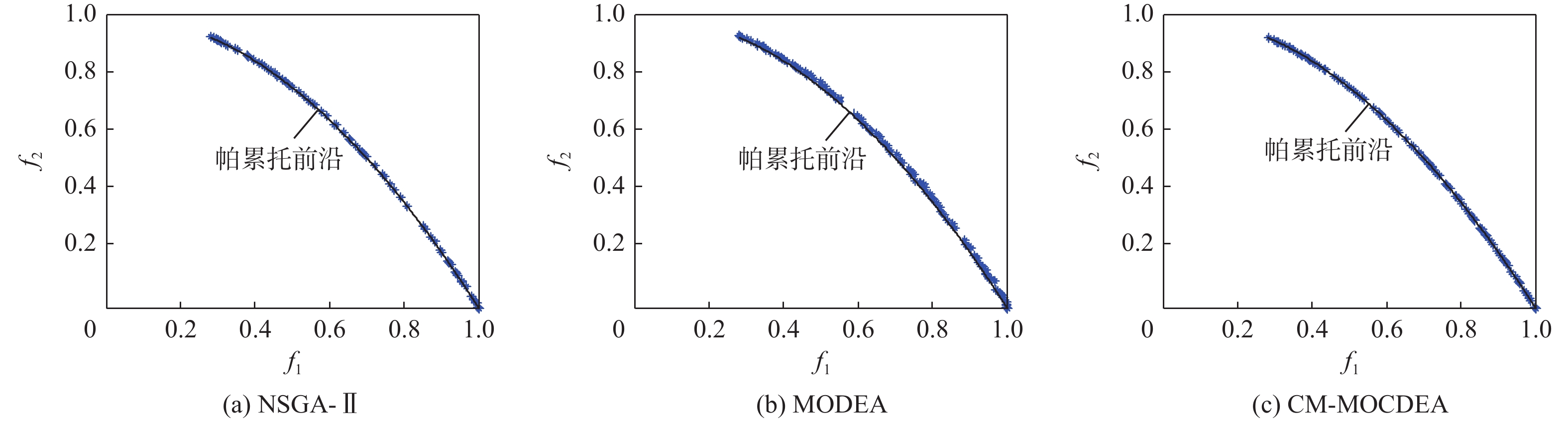
表 2 不同算法在不同测试函数下的性能指标值
Table 2. Performance index values of different algorithms with different test functions
算法 GD IGD SP 运行时间/s ZDT1 ZDT2 ZDT6 ZDT1 ZDT2 ZDT6 ZDT1 ZDT2 ZDT6 ZDT1 ZDT2 ZDT6 NSGA-Ⅱ 0.00612 0.00698 0.00801 0.01297 0.01310 0.01527 0.00834 0.00822 0.01065 0.62919 0.13297 0.55161 MODEA 0.00741 0.00901 0.00884 0.01470 0.01545 0.01708 0.01021 0.01391 0.01365 0.64541 0.14346 0.58394 CM-MOCDEA 0.00498 0.00413 0.00612 0.00841 0.01033 0.01152 0.00545 0.00603 0.00923 0.67934 0.16238 0.67920
下载: 导出CSV
-
[1] 闫涛, 韩崇昭, 张光华. 空中目标传感器管理方法综述[J]. 航空学报, 2018, 39(10): 26-36.YAN T, HAN C Z, ZHANG G H. An overview of sensor management approaches for aerial target[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(10): 26-36(in Chinese). [2] BOSTROM-ROST P, AXEHILL D, HENDEBY G. Sensor management for search and track using the poisson multi-bernoulli mixture filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(5): 2771-2783. doi: 10.1109/TAES.2021.3061802 [3] RAVAGO N, JONES B A. Risk-aware sensor scheduling and tracking of large constellations[J]. Advances in Space Research, 2021, 68(6): 2530-2550. doi: 10.1016/j.asr.2021.04.042 [4] WANG Y, HUSSEIN I I, ERWIN R S. Risk-based sensor management for integrated detection and estimation[J]. Journal of Guidance Control & Dynamics, 2012, 34(6): 3633-3638. [5] 庞策, 单甘霖, 段修生. 多传感器协同识别跟踪多目标管理方法[J]. 北京航空航天大学学报, 2019, 45(8): 1674-1680.PANG C, SHAN G L, DUAN X S. Management method for multiple sensors’ recognizing and tracking multiple targets cooperatively[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(8): 1674-1680(in Chinese). [6] ZHANG Z N, SHAN G L. UTS-based foresight optimization of sensor scheduling for low interception risk tracking[J]. International Journal of Adaptive Control & Signal Processing, 2014, 28(10): 921-931. [7] 田晨, 裴扬, 侯鹏, 等. 基于决策不确定性的多目标跟踪传感器管理[J]. 航空学报, 2020, 41(10): 267-280. doi: 10.7527/S1000-6893.2020.23781TIAN C, PEI Y, HOU P, et al. Decision uncertainty based sensor management for multi-target tracking[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(10): 267-280(in Chinese). doi: 10.7527/S1000-6893.2020.23781 [8] KRISHNAMURTHY V. Emission management for low probability intercept sensors in network centric warfare[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(1): 133-151. doi: 10.1109/TAES.2005.1413752 [9] 张昀普, 单甘霖. 面向空中目标威胁评估的多传感器管理方法[J]. 航空学报, 2019, 40(11): 245-258. doi: 10.7527/S1000-6893.2019.23218ZHANG Y P, SHAN G L. Multi-sensor management approach for aerial target threat assessment[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(11): 245-258(in Chinese). doi: 10.7527/S1000-6893.2019.23218 [10] PANG C, SHAN G L. Risk-based sensor scheduling for target detection[J]. Computers & Electrical Engineering, 2019, 77(1): 179-190. [11] KE S, CHEN H, YAO L. Probabilistic coverage based sensor scheduling for target tracking sensor networks[J]. Information Sciences, 2015, 292(1): 95-110. [12] PANG C, XU G G, SHAN G L, et al. A new energy efficient management approach for wireless sensor networks in target tracking[J]. Defence Technology, 2021, 17(3): 932-947. doi: 10.1016/j.dt.2020.05.022 [13] PANG C, SHAN G L, DUAN X S, et al. A multi-mode sensor management approach in the missions of target detecting and tracking[J]. Electronics, 2019, 8(1): 71-89. doi: 10.3390/electronics8010071 [14] WU W H, SUN H, CAI Y, et al. MM-GLMB filter-based sensor control for tracking multiple maneuvering targets hidden in the doppler blind zone[J]. IEEE Transactions on Signal Processing, 2020, 68(1): 4555-4567. [15] PAK W, CHOI J G, BAHK S. Duty cycle allocation to maximize network lifetime of wireless sensor networks with delay constraints[J]. Wireless Communications and Mobile Computing, 2014, 14(6): 613-628. doi: 10.1002/wcm.2215 [16] 单甘霖, 庞策, 段修生. 面向作战任务的最小风险传感器调度方法[J]. 国防科技大学学报, 2020, 42(2): 186-193.SHAN G L, PANG C, DUAN X S. Sensor scheduling method based on minimum risk facing the combat task[J]. Journal of National University of Defense Technology, 2020, 42(2): 186-193(in Chinese). [17] 徐公国, 单甘霖, 段修生, 等. 基于马尔科夫决策过程的多传感器协同检测与跟踪调度方法[J]. 电子与信息学报, 2019, 41(9): 2201-2208.XU G G, SHAN G L, DUAN X S, et al. Scheduling method based on Markov decision process for multi-sensor cooperative detection and tracking[J]. Journal of Electronics and Information Technology, 2019, 41(9): 2201-2208(in Chinese). [18] 万开方, 高晓光, 李波, 等. 基于部分可观察马尔可夫决策过程的多被动传感器组网协同反隐身探测任务规划[J]. 兵工学报, 2015, 36(4): 731-743.WAN K F, GAO X G, LI B, et al. Mission planning of passive networked sensors for cooperative anti-stealth detection based POMDP[J]. Acta Armamentarii, 2015, 36(4): 731-743(in Chinese). [19] XU G G, SHAN G L, DUAN X S. Sensor scheduling for ground maneuvering target tracking in presence of detection blind zone[J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 692-702. doi: 10.23919/JSEE.2020.000044 [20] 孙哲人, 黄玉划, 陈志远. 面向多目标优化的多样性代理辅助进化算法[J]. 软件学报, 2021, 32(12): 3814-3828.SUN Z R, HUANG Y H, CHEN Z Y. Diversity based surrogate-assisted evolutionary algorithm for expensive multi-objective optimization problem[J]. Journal of Software, 2021, 32(12): 3814-3828(in Chinese). [21] MO Y, AMBROSINO R, SINOPOLI B. Sensor selection strategies for state estimation in energy constrained wireless sensor networks[J]. Automatica, 2011, 47(7): 1330-1338. doi: 10.1016/j.automatica.2011.02.001 [22] ZHOU G J, GUO Z K, LI K Y, et al. Motion modeling and state estimation in range-Doppler plane[J]. Aerospace Science and Technology, 2021, 115(1): 1-13. [23] BAO T, ZHANG Z, SABAHI M F. An improved radar and infrared sensor tracking fusion algorithm based on IMM-UKF[C]//2019 IEEE 16th International Conference on Networking, Sensing and Control. Piscataway: IEEE Press, 2019: 420-434. [24] LI S, LV J, TIAN S. Posterior Cramer-Rao lower bound for wireless sensor localization networks[J]. Electronics Letters, 2018, 54(22): 1296-1298. doi: 10.1049/el.2018.6456 [25] YANG Y K, XIONG P W, WANG Q, et al. Analysis of byzantine attacks for target tracking in wireless sensor networks[J]. Sensors, 19(15): 3436-3451. [26] WANG R, XIONG J, ISHIBUCHI H, et al. On the effect of reference point in MOEA/D for multi-objective optimization[J]. Applied Soft Computing, 2017, 58(1): 25-34. [27] KUIJPERS B. Deciding the point-to-fixed-point problem for skew tent maps on an interval[J]. Journal of Computer and System Sciences, 2021, 115(1): 113-120. [28] 黄刚, 李军华. 基于AC-DSDE进化算法多UAVs协同目标分配[J]. 自动化学报, 2021, 47(1): 173-184.HUANG G, LI J H. Multi-uav cooperative target allocation based on AC-DSDE evolutionary algorithm[J]. Acta Automatica Sinica, 2021, 47(1): 173-184(in Chinese). [29] DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm: NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. doi: 10.1109/4235.996017 [30] 栗三一, 王延峰, 乔俊飞, 等. 一种基于区域局部搜索的NSGA Ⅱ算法[J]. 自动化学报, 2020, 46(12): 2617-2627.LI S Y, WANG Y F, QIAO J F, et al. A regional local search strategy for NSGA Ⅱ algorithm[J]. Acta Automatica Sinica, 2020, 46(12): 2617-2627(in Chinese). [31] 曾家宋. 多目标优化问题的差分进化算法研究[D]. 厦门: 厦门大学, 2017: 28-30.ZENG J S. Research of differential evolutionary algorithm to solve multi-objective optimization problems[D]. Xiamen: Xiamen University, 2017: 28-30(in Chinese). [32] 刘宝, 董明刚, 敬超. 改进的排序变异多目标差分进化算法[J]. 计算机应用, 2018, 38(8): 2157-2163.LIU B, DONG M G, JING C. Multi-objective differential evolution algorithm with improved ranking-based mutation[J]. Journal of Computer Applications, 2018, 38(8): 2157-2163(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 179
- HTML全文浏览量: 29
- PDF下载量: 32
- 被引次数: 0
