



Coordinated target defense for multi-UAVs based on exponentially averaged momentum pigeon-inspired optimization
-
摘要:
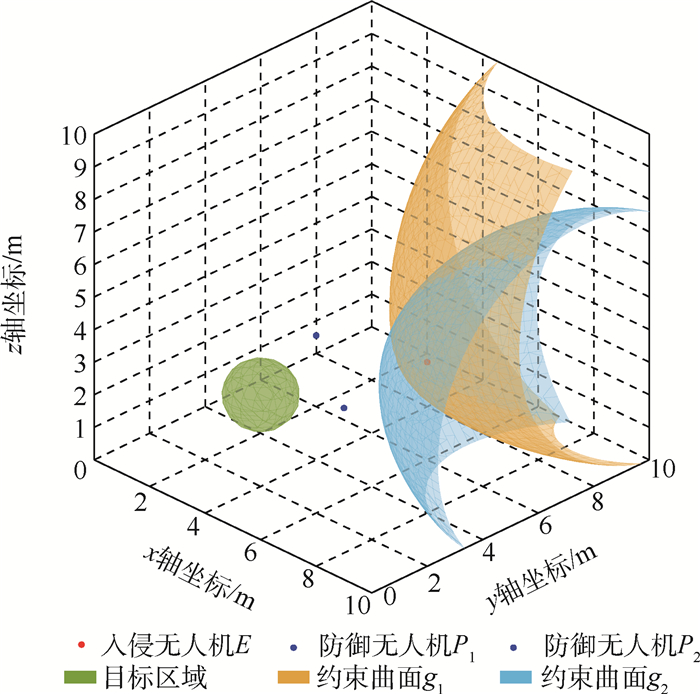
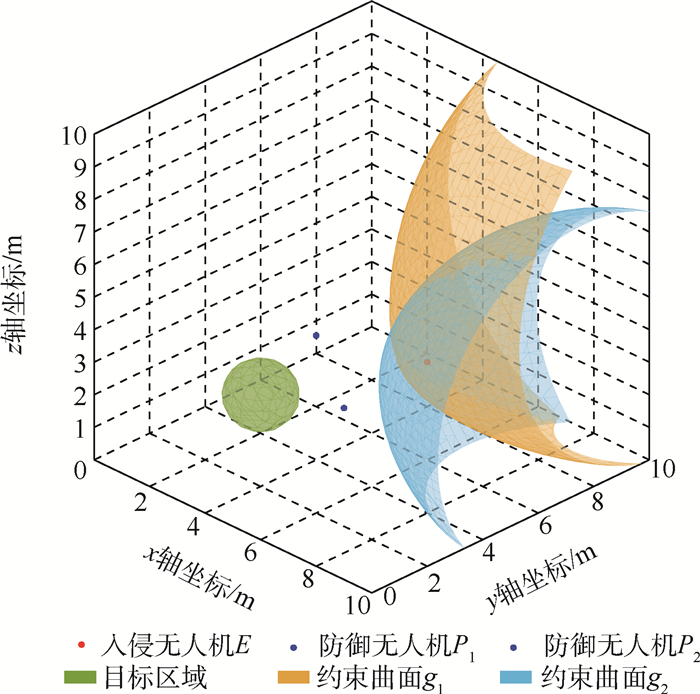
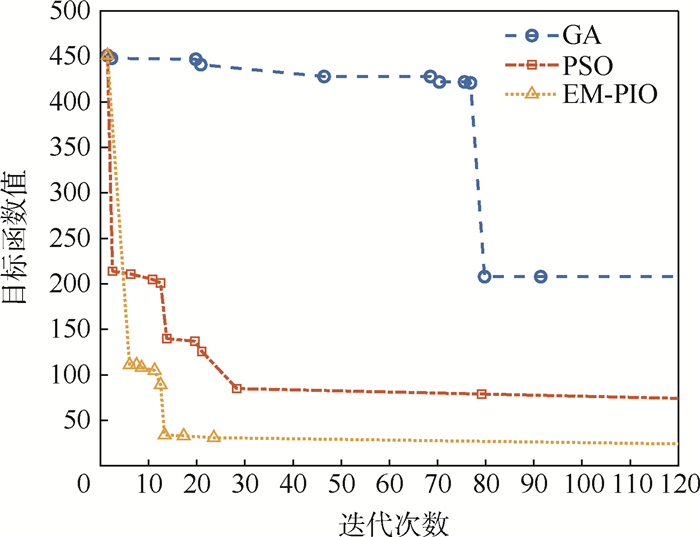
针对多无人机(UAV)协同目标防御问题,提出了一种基于指数平均动量鸽群优化(EM-PIO)算法。针对三维空间中的多无人机协同目标防御系统进行建模,得到了无人机支配区域的曲面约束方程,并获得了双方无人机的最优控制输入量。采用多级罚函数法构造了优化算法的目标函数,并通过所提出的EM-PIO算法来求解最优目标点。将所提EM-PIO算法与遗传算法(GA)和粒子群优化(PSO)算法进行仿真对比实验,验证了所提EM-PIO算法更加有效解决多无人机协同目标防御问题。
-
关键词:
- 无人机(UAV)对抗 /
- 鸽群优化(PIO) /
- 目标防御 /
- 微分博弈 /
- 鞍点策略
Abstract:This paper proposes a multi-unmanned aerial vehicle (UAV) cooperative target defense method based on exponentially averaged momentum pigeon-inspired optimization (EM-PIO). Firstly, the multi-UAV cooperative target protection system in three-dimensional space is modeled. The surface constraint equation of the UAV-dominated area and the optimal control input of UAVs are obtained. Secondly, in order to address the constrained optimization problem, the multi-level penalty function method is used to generate the objective function of the optimization algorithm. In addition, an EM-PIO algorithm is proposed to solve the optimal point. Comparative experiments with the genetic algorithm (GA) and particle swarm optimization (PSO) are conducted. The simulation results show that the EM-PIO method can solve the multi-UAV cooperative target defense problem more effectively.
-

图 1 EM-PIO算法解决多无人机协同防御问题实现流程
Figure 1. Procedure of coordinated target defense with multi-UAVs cooperative using EM-PIO algorithm

图 3 EM-PIO、PSO和GA算法进化曲线对比
Figure 3. Comparison of evolution curves of EM-PIO, PSO and GA algorithms
表 1 EM-PIO、PSO和GA算法参数
Table 1. Parameters of EM-PIO, PSO and GA algorithms
算法 参数 数值 描述 EM-PIO N 20 鸽群中鸽子数目 Nc1 100 地图和指南针算子迭代次数 Nc2 120 地标算子迭代次数 α 0.5 动量因子 PSO N 20 种群粒子数目 Nc 120 迭代次数 ω 0.5 惯性权重 c1 0.6 社会学习因子 c2 0.4 个体学习因子 GA N 20 种群个体数目 Nc 120 迭代次数 Pc 0.8 交叉概率 Pm 0.05 变异概率  下载: 导出CSV
下载: 导出CSV
-
[1] 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018: 1-10.DUAN H B, QIU H X. Unmanned aerial vehicle swarm autonomous control based on swarm intelligence[M]. Beijing: Science Press, 2018: 1-10(in Chineses). [2] 段海滨, 何杭轩, 赵彦杰, 等. 2021年无人机热点回眸[J]. 科技导报, 2022, 40(1): 215-227. https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB202201013.htmDUAN H B, HE H X, ZHAO Y J, et al. Review of technological hotspots of unmanned aerial vehicle in 2021[J]. Science & Technology Review, 2022, 40(1): 215-227(in Chineses). https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB202201013.htm [3] ZHU K, HAN B, ZHANG T. Multi-UAV distributed collaborative coverage for target search using heuristic strategy[J]. Guidance, Navigation and Control, 2021, 1(1): 2150002. doi: 10.1142/S2737480721500023 [4] HUO M Z, DUAN H B, FAN Y M. Pigeon-inspired circular formation control for multi-UAV system with limited target information[J]. Guidance, Navigation and Control, 2021, 1(1): 2150004. doi: 10.1142/S2737480721500047 [5] VON MOLL A, GARCIA E, CASBEER D, et al. Multiple-pursuer, single-evader border defense differential game[J]. Journal of Aerospace Information Systems, 2020, 17(8): 407-416. doi: 10.2514/1.I010740 [6] GARCIA E, CASBEER D W, VON MOLL A, et al. Multiple pursuer multiple evader differential games[J]. IEEE Transactions on Automatic Control, 2020, 66(5): 2345-2350. [7] SHISHIKA D, KUMAR V. Perimeter-defense game on arbitrary convex shapes[EB/OL]. (2021-05-01)[2022-04-28]. https://arxiv.org/abs/1909.03989. [8] SINHA A, KUMAR S R, MUKHERJEE D. Three-agent time-constrained cooperative pursuit-evasion[J]. Journal of Intelligent & Robotic Systems, 2022, 104(2): 1-27. [9] WANG J, LI G, LIANG L, et al. Pursuit-evasion games of multiple cooperative pursuers and an evader: A biological-inspired perspective[J]. Communications in Nonlinear Science and Numerical Simulation, 2022, 110: 106386. doi: 10.1016/j.cnsns.2022.106386 [10] GANJEFAR S, TOFIGHI M. Dynamic economic dispatch solution using an improved genetic algorithm with non-stationary penalty functions[J]. European Transactions on Electrical Power, 2011, 21(3): 1480-1492. doi: 10.1002/etep.520 [11] KONNOV I V. Application of penalty methods to non-stationary variational inequalities[J]. Nonlinear Analysis: Theory, Methods & Applications, 2013, 92: 177-182. [12] KATOCH S, CHAUHAN S S, KUMAR V. A review on genetic algorithm: Past, present, and future[J]. Multimedia Tools and Applications, 2021, 80(5): 8091-8126. doi: 10.1007/s11042-020-10139-6 [13] PARSOPOULOS K E, VRAHATIS M N. Particle swarm optimization method for constrained optimization problems[J]. Intelligent Technologies-Theory and Application: New Trends in Intelligent Technologies, 2002, 76(1): 214-220. [14] DUAN H B, QIAO P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7(1): 24-37. doi: 10.1108/IJICC-02-2014-0005 [15] JIVANI U N, VAIDYA O B, BHATTACHARYA A, et al. A swarm variant for the schrodinger solver[C]//Proceedings of 2021 International Joint Conference on Neural Networks (IJCNN). Piscataway: IEEE Press, 2021: 1-8. -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 321
- HTML全文浏览量: 123
- PDF下载量: 59
- 被引次数: 0
