



Deployment dynamics and multi-parameter performances analysis of spatial rectangular tether-net
-
摘要:
空间绳网系统是一种针对空间碎片的柔性捕获系统,针对带有太阳翼的空间目标,提出一种用于捕获目标主体的长方形绳网。为分析其展开效果,建立有限元模型,通过对比地面试验结果来验证有限元模型的可靠性。建立长方形绳网的评价指标,并通过各项评价指标对比不同牵拉模式、牵引绳分布圆直径及牵引体发射角度下的绳网展开特性。结果表明:仿真结果与试验结果吻合,有限元模型可靠;在八点牵拉、十点牵拉和十二点牵拉3种模式下,十点牵拉所能达到的展开效果最好;牵引绳分布圆直径增大,所能达到的最大展开面积和保形距离减小,展开距离增大;牵引体的发射角度增大,长方形绳网的最大展开面积和保形距离增大,展开距离减小。
Abstract:A spatial tether-net system is a flexible capture system for space debris. A rectangular tether-net is proposed to capture a spatial target with solar wings. The dynamic model of rectangular tether-net during the deployment process is established to analyze the deployment characteristic. The accuracy of the simulation model is verified by comparing it with the on-ground experimental results. The dimensions of the towing tether distribution circle, the launching angle of the towing block, and the deployment properties of the tether-net under various towing modes were compared by each evaluation index, which was established for the rectangular tether-net. The results show that the results of the simulation are consistent with the experimental, so the simulation model is reliable. At eight-point towing mode, ten-point towing mode and twelve-point towing mode, the ten-point towing mode can achieve the best deployment effect. When the diameter of the towing tether distribution circle is larger, the maximum deployment area and shape preserving distance of the tether-net decreases, but the deployment distance of the tether-net increases. The maximum deployment area of the rectangular tether-net and the shape-preserving distance gradually grow with an increase in the towing block's launch angle, while the deployment distance gradually decreases.
-
Key words:
- space debris /
- flexible capture /
- rectangular tether-net /
- solar wing /
- multi-parameter analysis
-
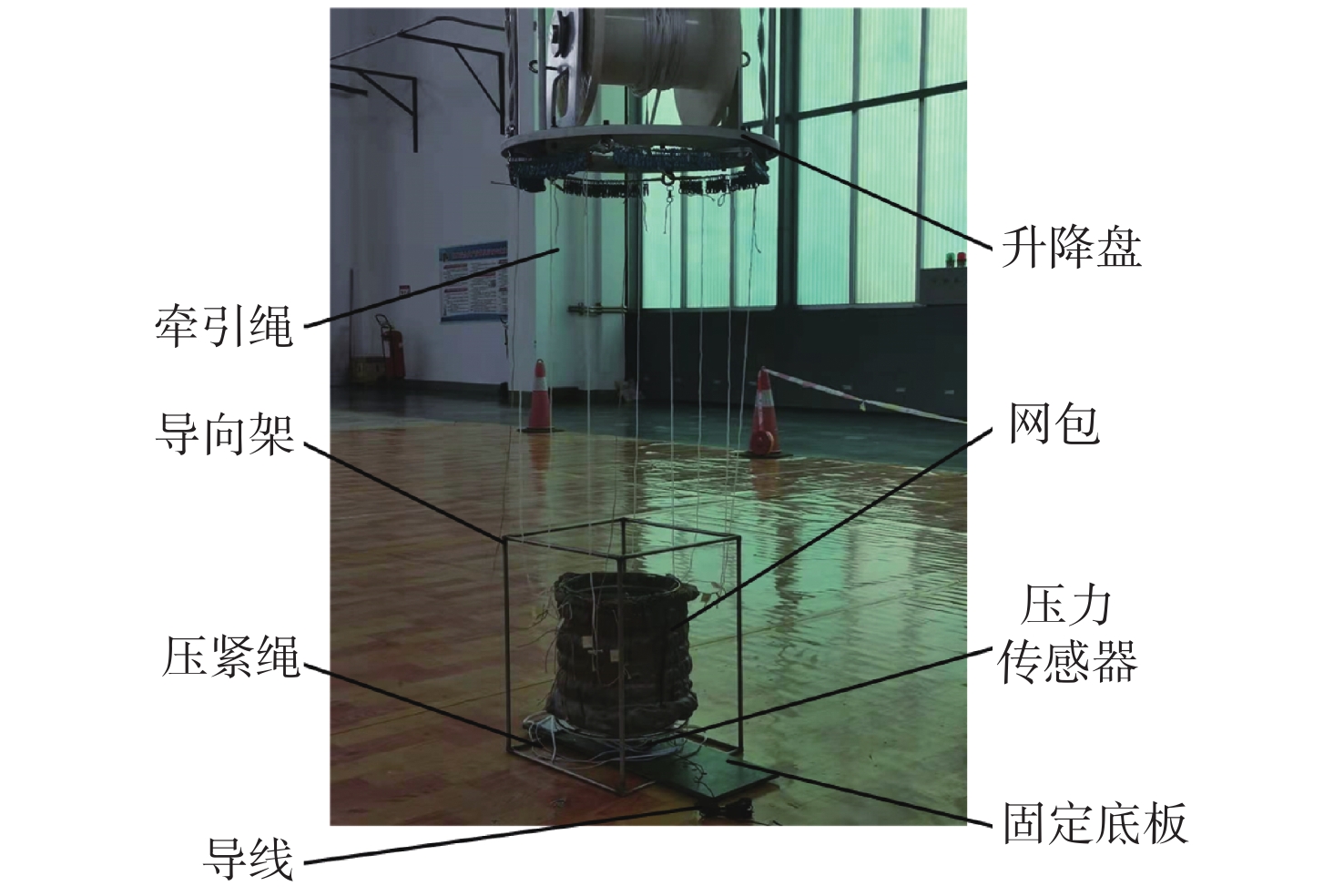
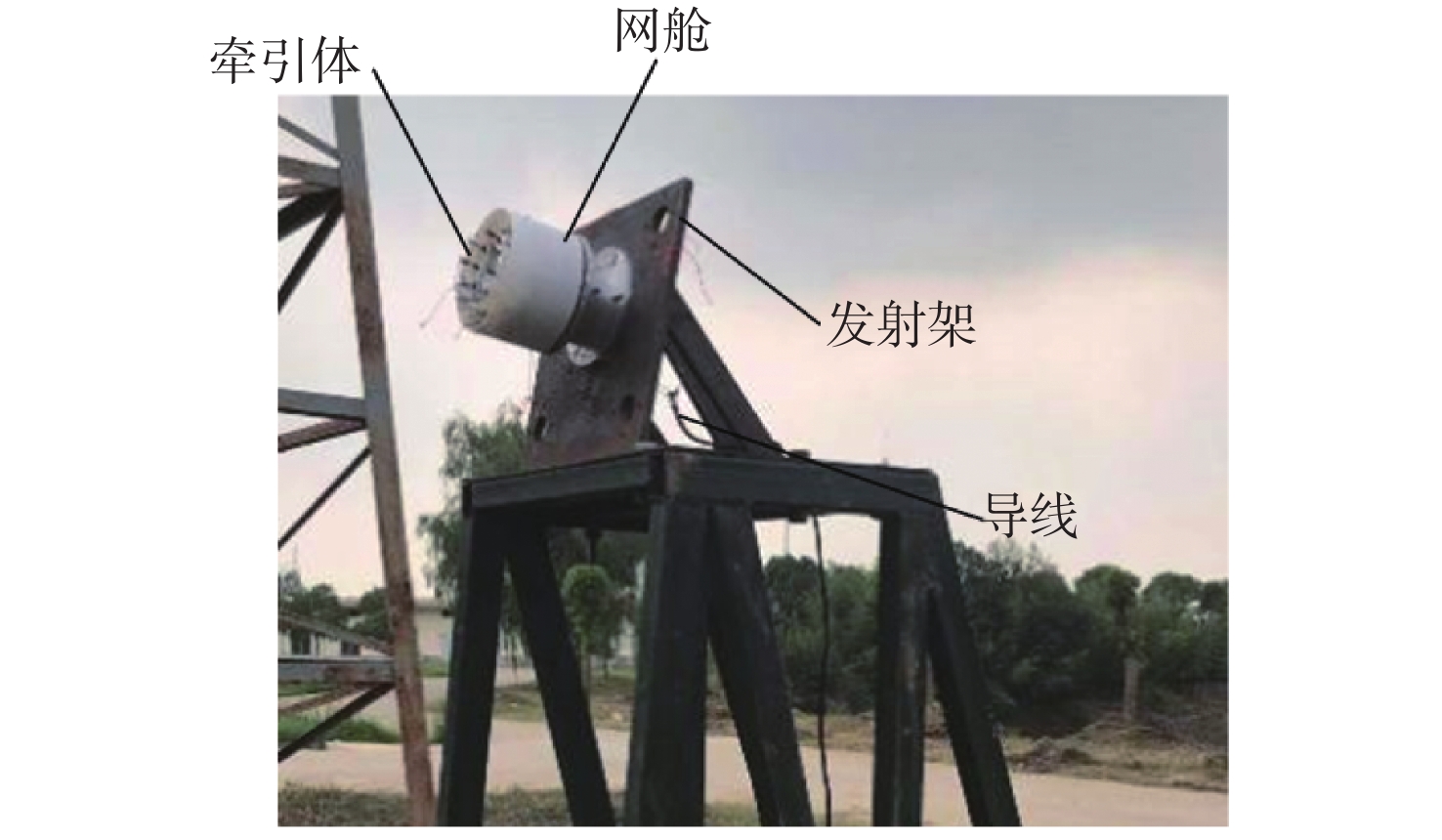
图 5 绳网抽出阻力试验示意图
Figure 5. Schematic diagram of tether-net withdrawal resistance experiment

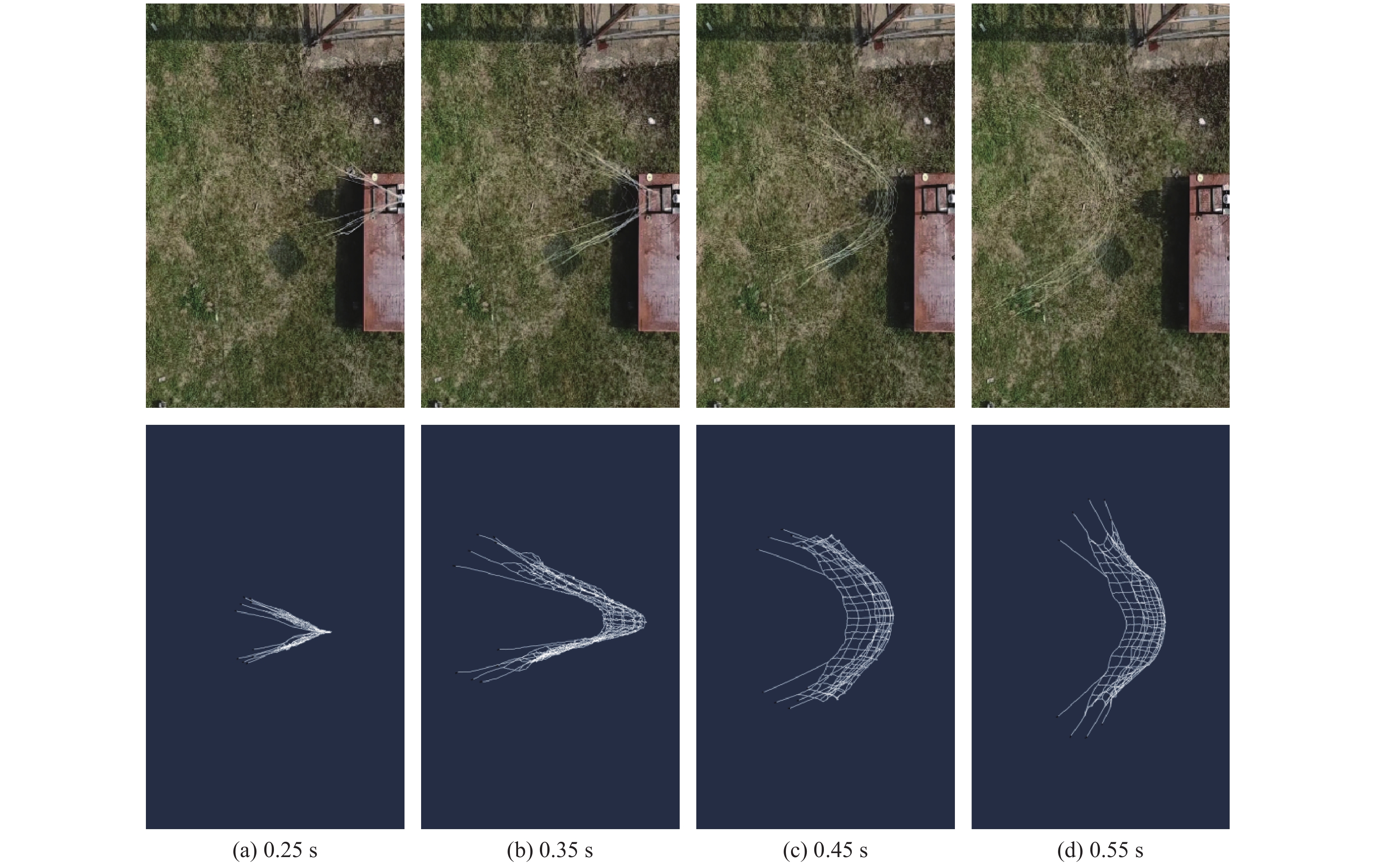
图 9 仿真与试验绳网位形对比
Figure 9. Comparison of tether-net configuration between simulation and experiment
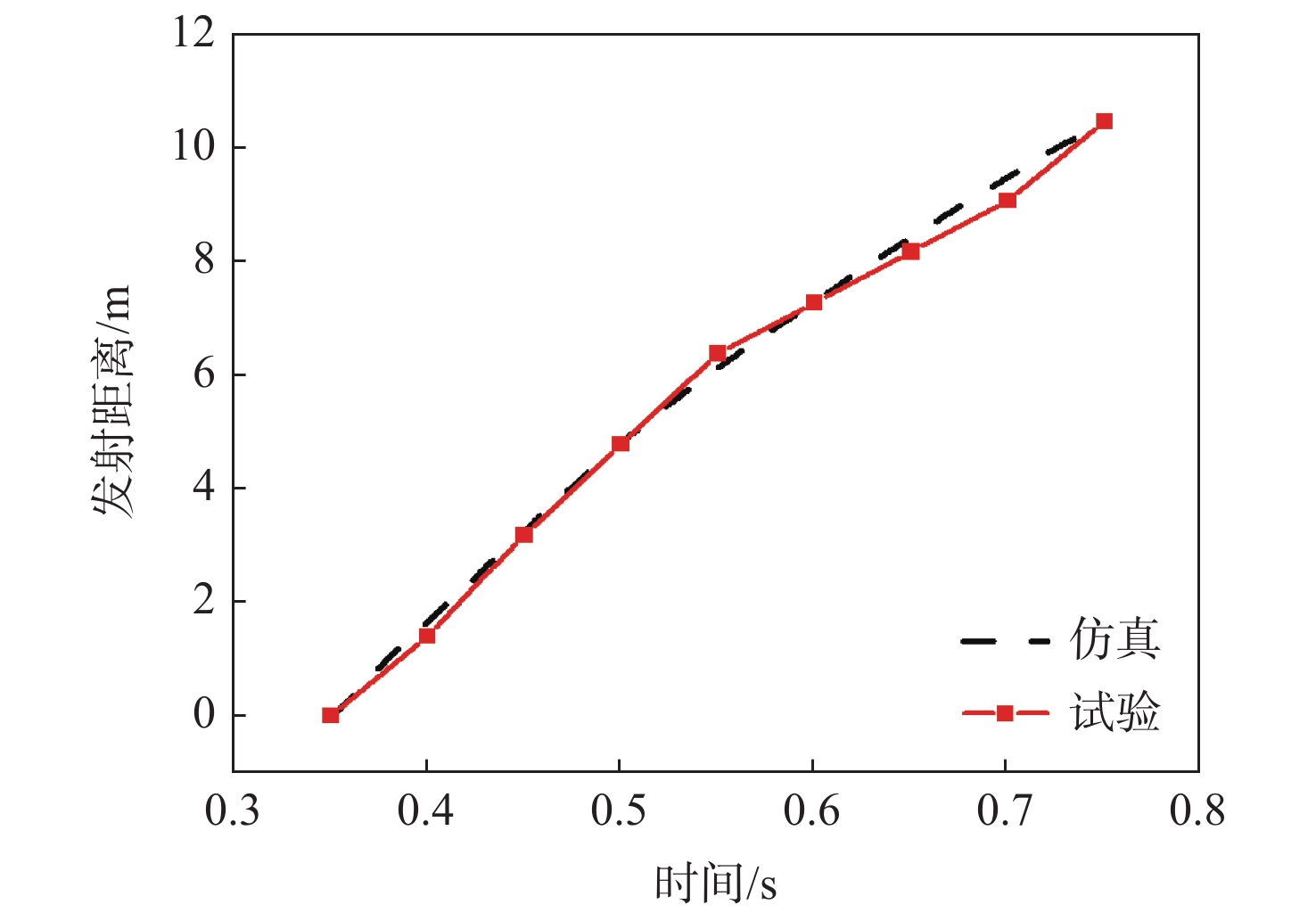
图 10 仿真与试验发射距离对比
Figure 10. Comparison of launching distance between simulation and experiment
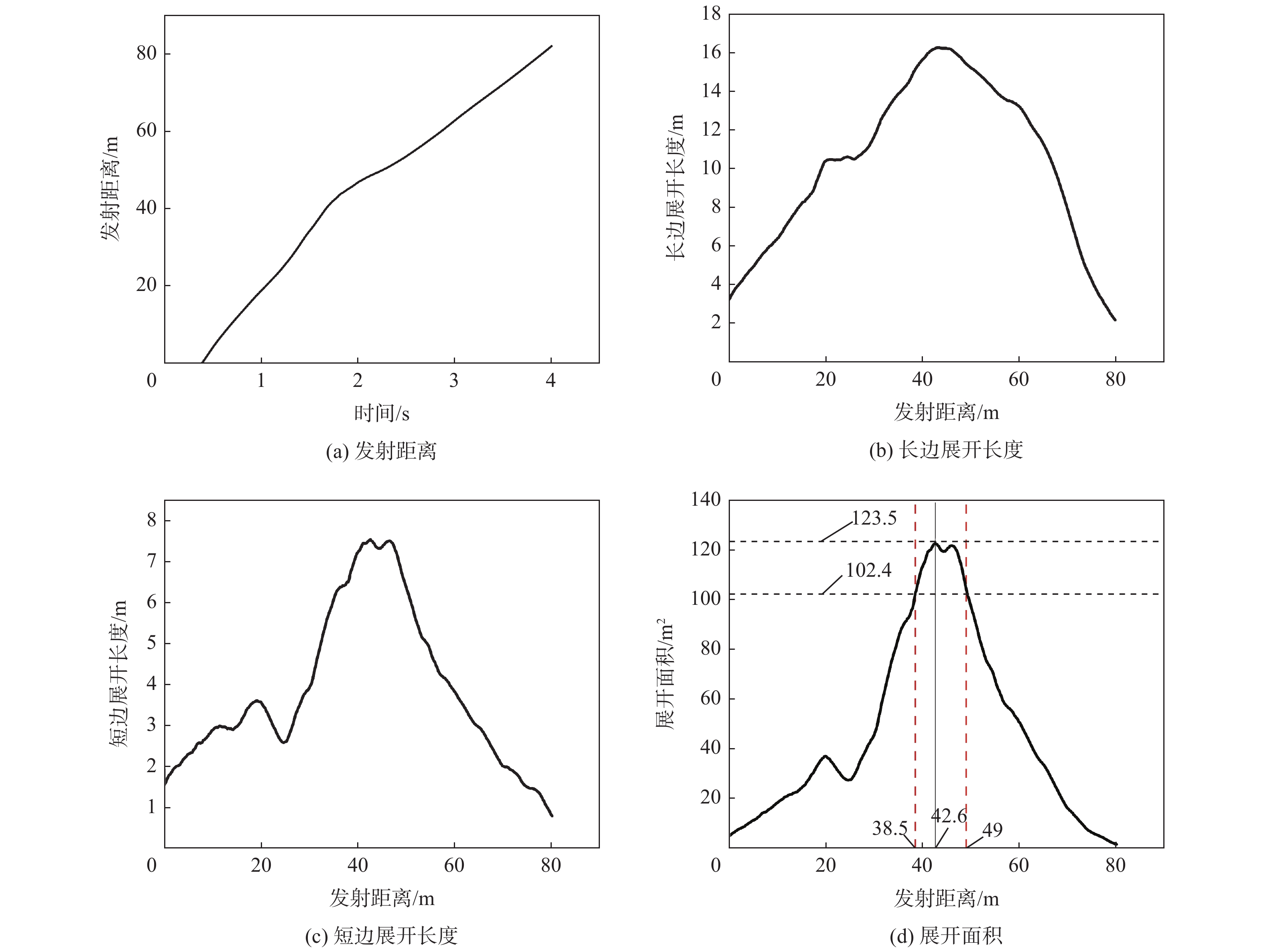
图 11 初始条件下绳网展开性能
Figure 11. Deployable performance of tether-net under initial conditions
图 13 不同牵拉模式下绳网展开性能
Figure 13. Deployment performance of tether-net under different towing modes
图 14 不同牵引绳分布圆直径下绳网展开性能
Figure 14. Deployment performance of tether-net under different diameter of towing tether distribution circle
图 15 不同发射角度下绳网展开性能
Figure 15. Deployment performance of tether-net under different launch angle
表 1 动力学模型初始参数
Table 1. Initial parameters of dynamics model
参数 数值 绳网边长/m 16×8 网目大小/(m×m) 0.8×0.8 主网绳直径/mm 0.5 边绳直径/mm 2 牵引绳直径/mm 2 牵引体质量/kg 0.17 发射速度/(m·s−1) 30 发射角度/(°) 16 牵引绳分布圆直径/m 21.2  下载: 导出CSV
下载: 导出CSV
-
[1] European Space Agency. Space debris[EB/OL]. (2022-04-04)[2022-05-04]. https://www.esa.int/Safety_Security/Space_Debris/Space_debris_by_the_numbers. [2] KESSLER D J, COUR-PALAIS B G. Collision frequency of artificial satellites: The creation of a debris belt[J]. Journal of Geophysical Research, 1978, 83(A6): 2637-2646. doi: 10.1029/JA083iA06p02637 [3] MARK C P, KAMATH S. Review of active space debris removal methods[J]. Space Policy, 2019, 47: 194-206. doi: 10.1016/j.spacepol.2018.12.005 [4] ELLERY A. Tutorial review on space manipulators for space debris mitigation[J]. Robotics, 2019, 8(2): 34. doi: 10.3390/robotics8020034 [5] BISCHOF B. ROGER-Robotic geostationary orbit restorer[C]//Proceedings of the 54th International Astronautical Congress. Paris: International Astronautical Federation, 2012, 3: 2518. [6] WAYMAN A, RATCLIFFE A, BARRACLOUGH S, et al. Design and testing of a full scale harpoon capture system[C]//Proceedings of the 7th European Conference on Space Debris. Darmstadt: ESA Space Debris Office, 2017, 7: 411-422. [7] 孙永军, 王钤, 刘伊威, 等. 空间非合作目标捕获方法综述[J]. 国防科技大学学报, 2020, 42(3): 74-90.SUN Y J, WANG Q, LIU Y W, et al. A review of spatial non-cooperative target acquisition methods[J]. Journal of National University of Defense Technology, 2020, 42(3): 74-90(in Chinese). [8] HOU Y S, LIU C, HU H Y, et al. Dynamic computation of a tether-net system capturing a space target via discrete elastic rods and an energy-conserving integrator[J]. Acta Astronautica, 2021, 186: 118-134. doi: 10.1016/j.actaastro.2021.05.029 [9] MANKALA K K, AGRAWAL S K. Dynamic modeling and simulation of impact in tether net/gripper systems[J]. Multibody System Dynamics, 2004, 11(3): 235-250. doi: 10.1023/B:MUBO.0000029393.25494.64 [10] GOLEBIOWSKI W, MICHALCZYK R, DYREK M, et al. Validated simulator for space debris removal with nets and other flexible tethers applications[J]. Acta Astronautica, 2016, 129: 229-240. doi: 10.1016/j.actaastro.2016.08.037 [11] GAO Q Y, ZHANG Q B, PENG W Y, et al. Dynamics modelling and ground test of space nets[C]//Proceedings of the International Conference on Mechanical & Aerospace Engineering. Piscataway: IEEE Press, 2016: 587-591. [12] SHAN M H, GUO J, GILL E. Deployment dynamics of tethered-net for space debris removal[J]. Acta Astronautica, 2017, 132: 293-302. doi: 10.1016/j.actaastro.2017.01.001 [13] SI J Y, PANG Z J, DU Z H, et al. Dynamics modeling and simulation of self-collision of tether-net for space debris removal[J]. Advances in Space Research, 2019, 64(9): 1675-1687. doi: 10.1016/j.asr.2019.08.006 [14] 李京阳, 于洋, 宝音贺西, 等. 空间飞网两种动力学模型的比较研究[J]. 力学学报, 2011, 43(3): 542-550.LI J Y, YU Y, BAOYIN H X, et al. Comparative study on two dynamic models of space flying net[J]. Chinese Journal of Theoretical and Applied Mechanics, 2011, 43(3): 542-550(in Chinese). [15] BOTTA E M, SHARF I, MISRA A K, et al. On the simulation of tether nets for space debris capture with vortex dynamics[J]. Acta Astronautica, 2016, 123: 91-102. doi: 10.1016/j.actaastro.2016.02.012 [16] 刘海涛, 张青斌, 杨乐平, 等. 空间绳网系统展开动力学特性分析[J]. 国防科技大学学报, 2015, 37(3): 68-77.LIU H T, ZHANG Q B, YANG L P, et al. Analysis of deployment dynamics of space tether-net system[J]. Journal of National University of Defense Technology, 2015, 37(3): 68-77(in Chinese). [17] SHARF I, THOMSEN B, BOTTA E M, et al. Experiments and simulation of a net closing mechanism for tether-net capture of space debris[J]. Acta Astronautica, 2017, 139: 332-343. doi: 10.1016/j.actaastro.2017.07.026 [18] 于洋. 空间绳索系统的动力学建模方法[C]//北京力学会第十六届学术年会. 北京: 北京力学会, 2010: 171-173.YU Y. Dynamic modeling method for space tethered systems[C]// Proceedings of the 16th Annual conference of Beijing Dynamic Society. Beijing: Beijing Dynamic Society, 2010: 171-173(in Chinese). [19] 刘海涛. 空间绳网展开及复合体离轨动力学与控制[D]. 长沙: 国防科学技术大学, 2014: 11-12.LIU H T. Dynamics and control of space tether-net deploys and complex deorbit[D]. Changsha: National University of Defense Technology, 2014: 11-12(in Chinese). [20] 庄茁, 由小川, 廖剑晖, 等. 基于Abaqus的有限元分析和应用[M]. 北京: 清华大学出版社, 2009: 192-193.ZHUANG Z, YOU X C, LIAO J H, et al. Finite element analysis and application based on Abaqus[M]. Beijing: Tsinghua University Press, 2009: 192-193(in Chinese). [21] YUE S, TITURUS B, NIE H, et al. Liquid spring damper for vertical landing reusable launch vehicle under impact conditions[J]. Mechanical Systems and Signal Processing, 2019, 121: 579-599. doi: 10.1016/j.ymssp.2018.11.034 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 198
- HTML全文浏览量: 103
- PDF下载量: 13
- 被引次数: 0
