



Dual-loop control of mass-actuated quadrotor UAV considering dynamic characteristics of moving mass
-
摘要:
针对滑块动态特性引入的附加干扰力矩造成系统姿态抖动强烈的问题,开展变质心四旋翼无人机滑块参数设计与姿态/伺服双回路控制研究。通过建立双滑块变质心四旋翼无人机八自由度运动模型,明确了滑块的引入对系统的影响,给出了与滑块动态特性相关的各项附加干扰力矩;分析并设计了滑块的安装位置、质量以及行程等参数,降低滑块对系统的耦合与干扰;最后以滑块驱动力作为控制量,设计了姿态/伺服双回路动态滑模控制器,同时利用非线性扰动观测器对复合扰动进行估计和补偿,并进行了仿真试验。仿真结果表明,在考虑滑块动态特性的情况下,所设计的控制器能够实现对变质心四旋翼无人机的姿态控制,并具有良好的抗干扰性能与鲁棒性。
Abstract:The study focuses on the severe attitude jitter brought on by the extra disturbance torque generated by the dynamic properties of the moving mass. It investigates the moving mass parameter design and attitude/servo dual-loop control of the mass-actuated quadrotor UAV. Firstly, the influence of the moving mass introduction on the system is clarified and various additional disturbance torque introduced by dynamic characteristics of the moving mass is given by establishing an eight-degree-of-freedom motion model of mass-actuated quadrotor UAV. Next, in order to lessen the coupling and disturbance of the moving mass to the system, characteristics including the installation position, mass, and various maximum displacements of the moving mass are examined and constructed.Finally, an attitude/servo dual-loop dynamic sliding mode controller is designed with the mass driving force as the control input, and the nonlinear disturbance observer is used to estimate and compensate for the composite disturbance. The results of the simulation demonstrate that the controller has high anti-interference performance and robustness when taking into account the dynamic features of the moving mass. It can also achieve attitude control of the mass-actuated quadrotor UAV.
-
Key words:
- moving mass control /
- quadrotor UAV /
- dynamic characteristics /
- dynamic sliding mode /
- dual-loop
-
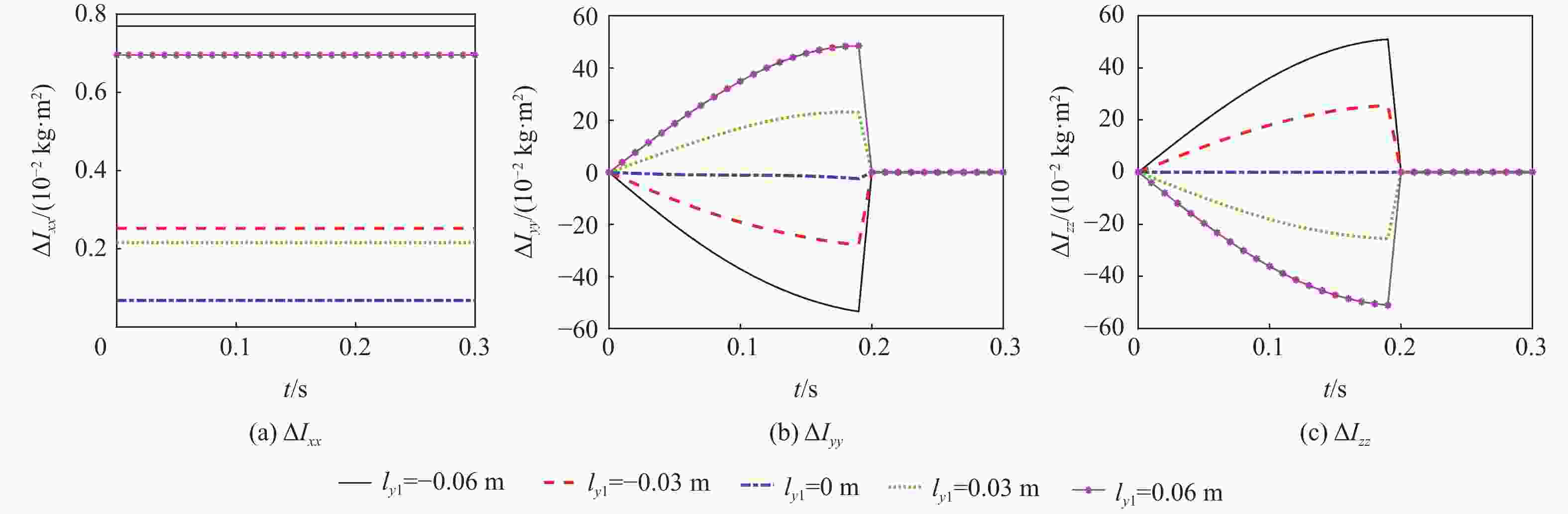
图 2 不同安装位置引入的附加转动惯量
Figure 2. Importing additional moment of inertia with different installation position
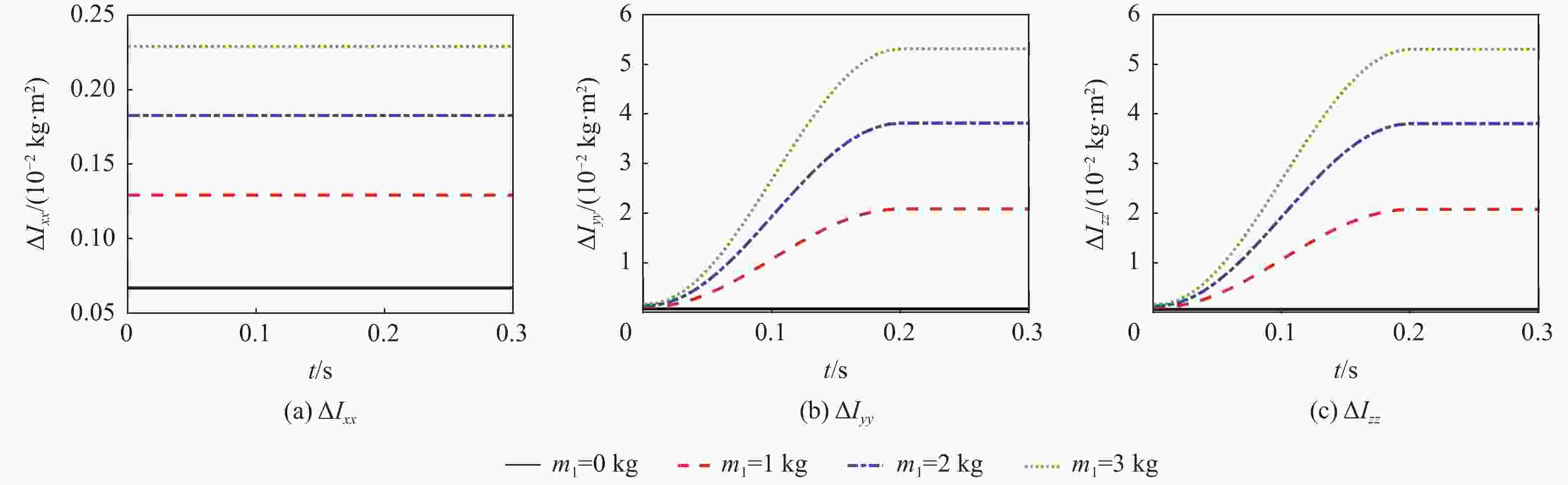
图 3 不同滑块质量引入的附加转动惯量
Figure 3. Importing additional moment of inertia with different slider masses
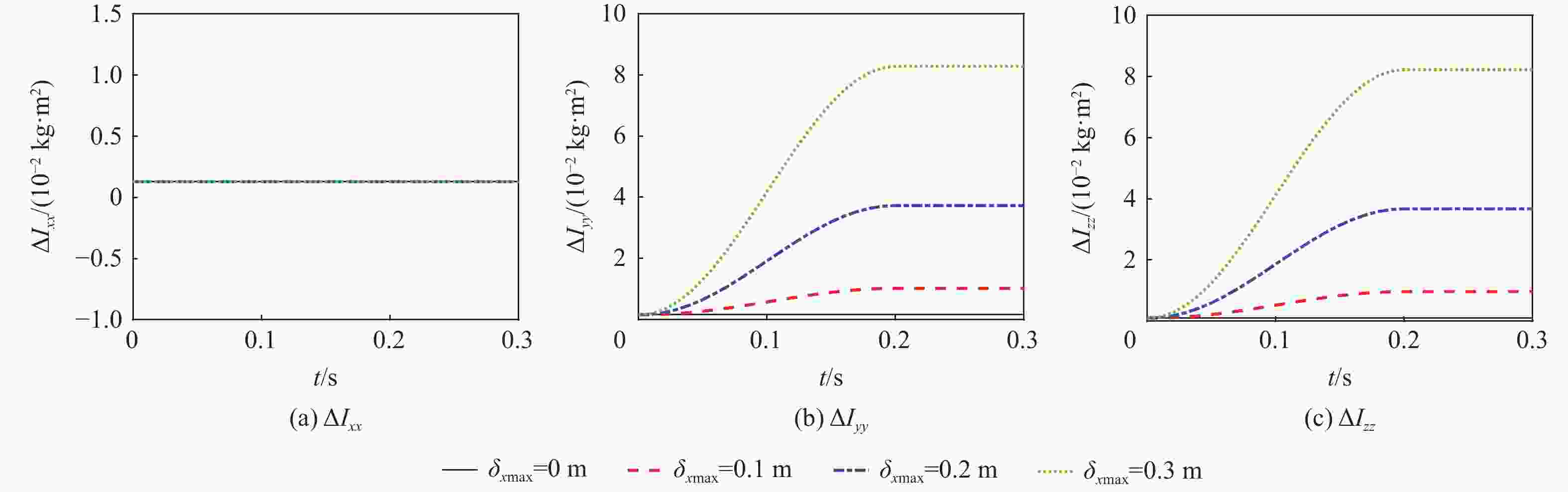
图 4 不同滑块行程引入的附加转动惯量
Figure 4. Importing additional moment of inertia with different slide strokes
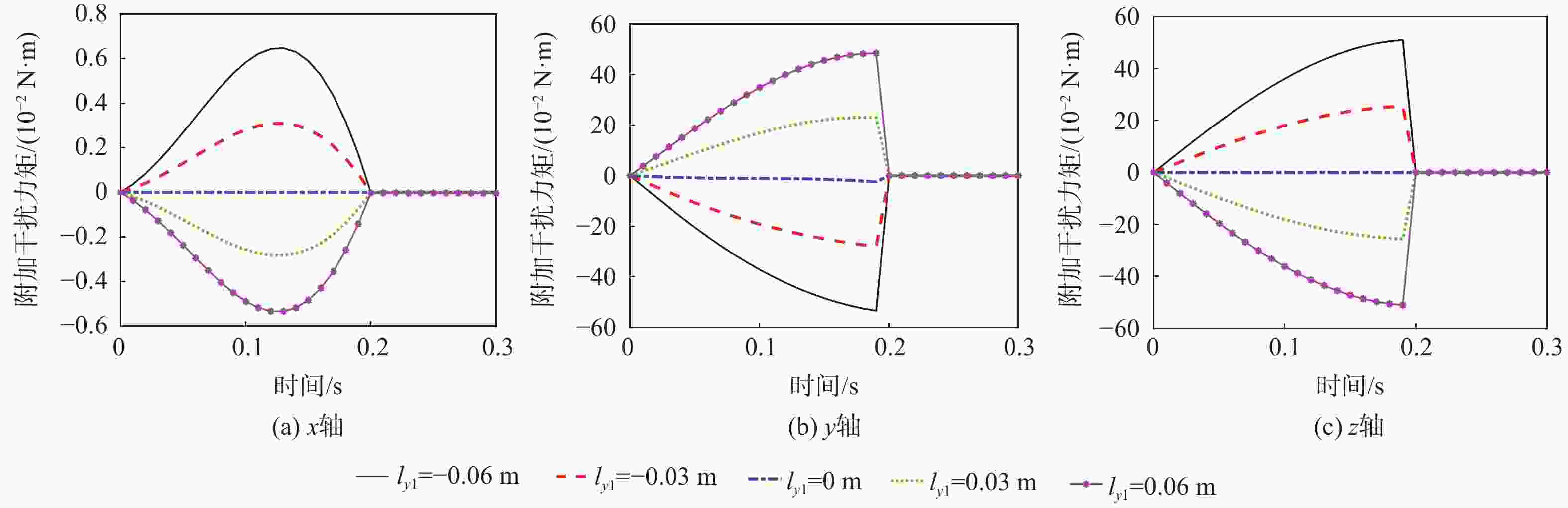
图 5 不同安装位置引入的附加干扰力矩
Figure 5. Importing disturbance torque with different installation positions
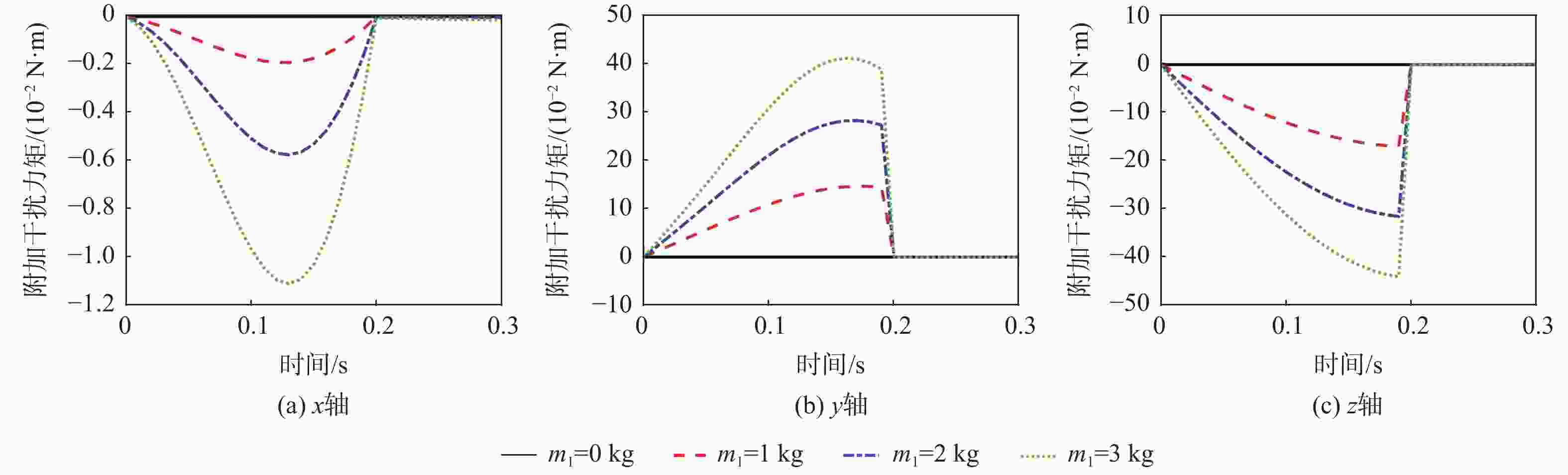
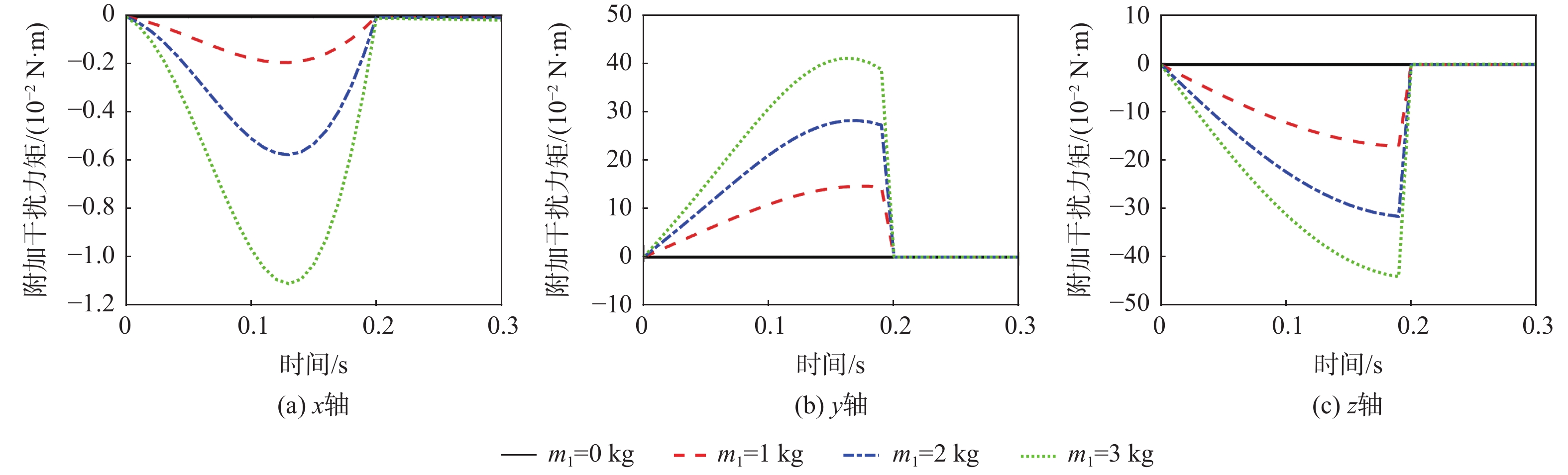
图 6 不同滑块质量引入的附加干扰力矩
Figure 6. Importing disturbance torque with different slider masses
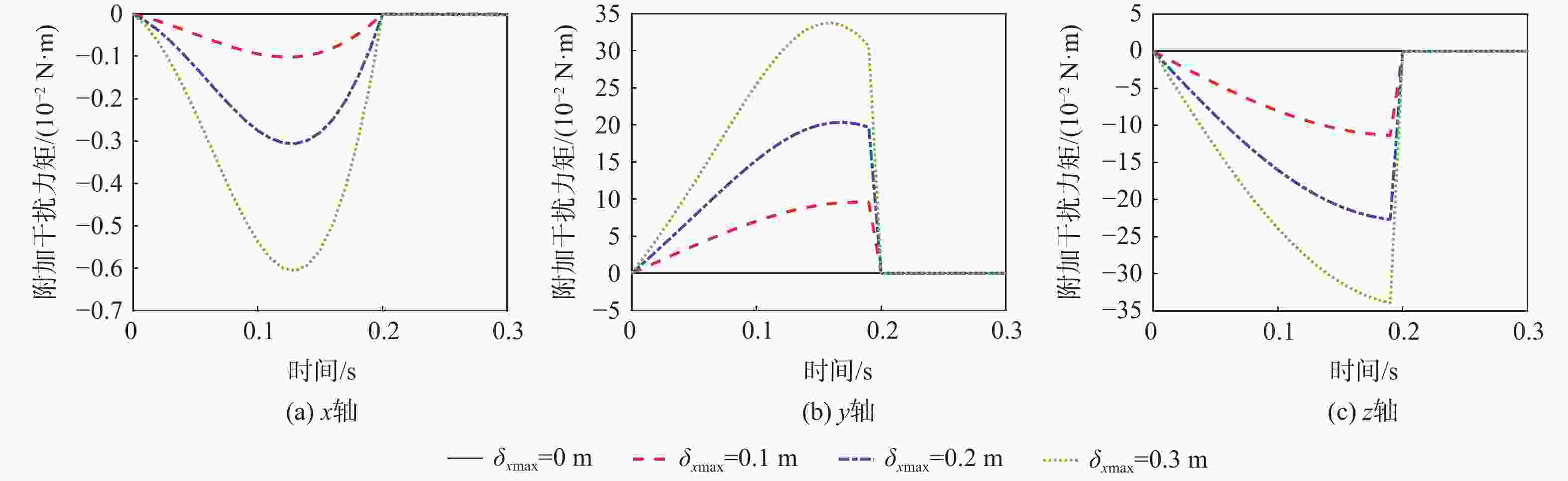
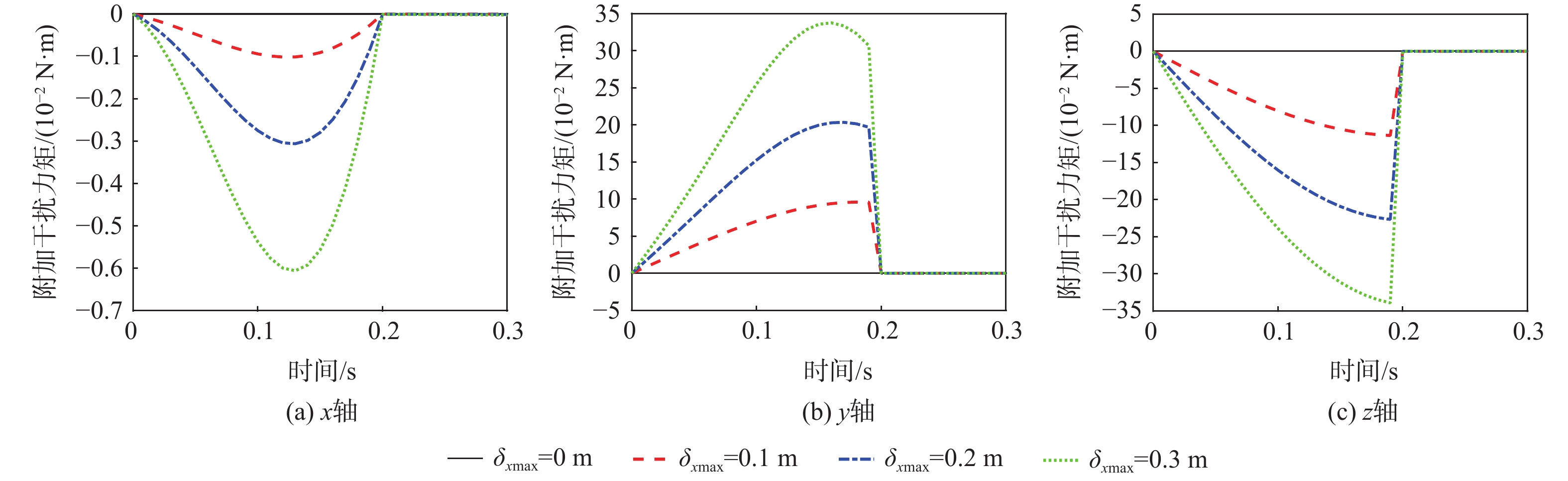
图 7 不同滑块行程引入的附加干扰力矩
Figure 7. Importing disturbance torque with different slide strokes
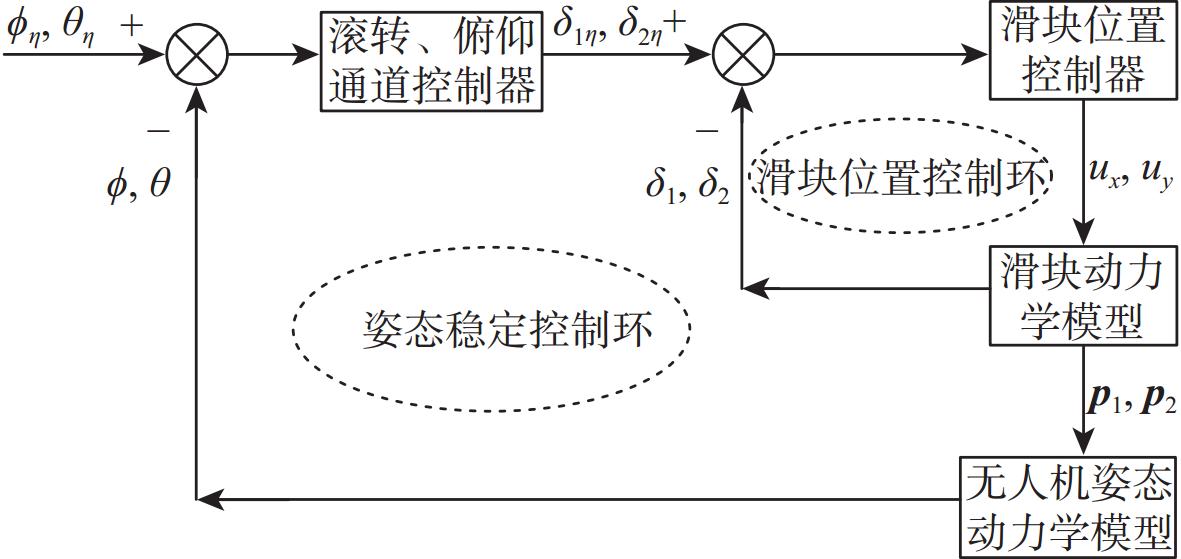
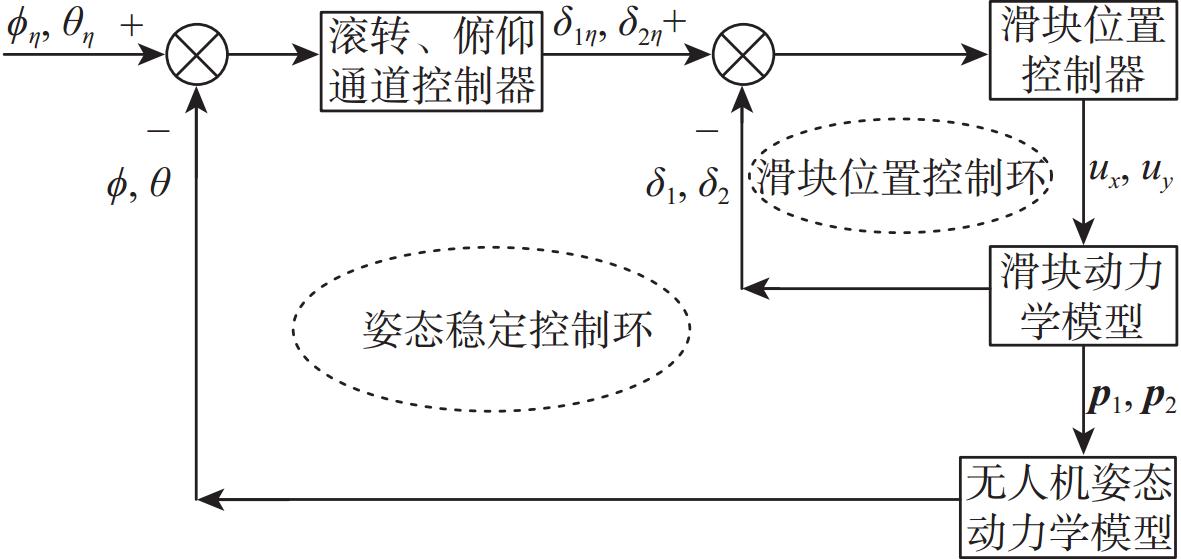
图 10 变质心四旋翼无人机姿态控制原理图
Figure 10. Schematic diagram of mass-actuated quadrotor UAV attitude control
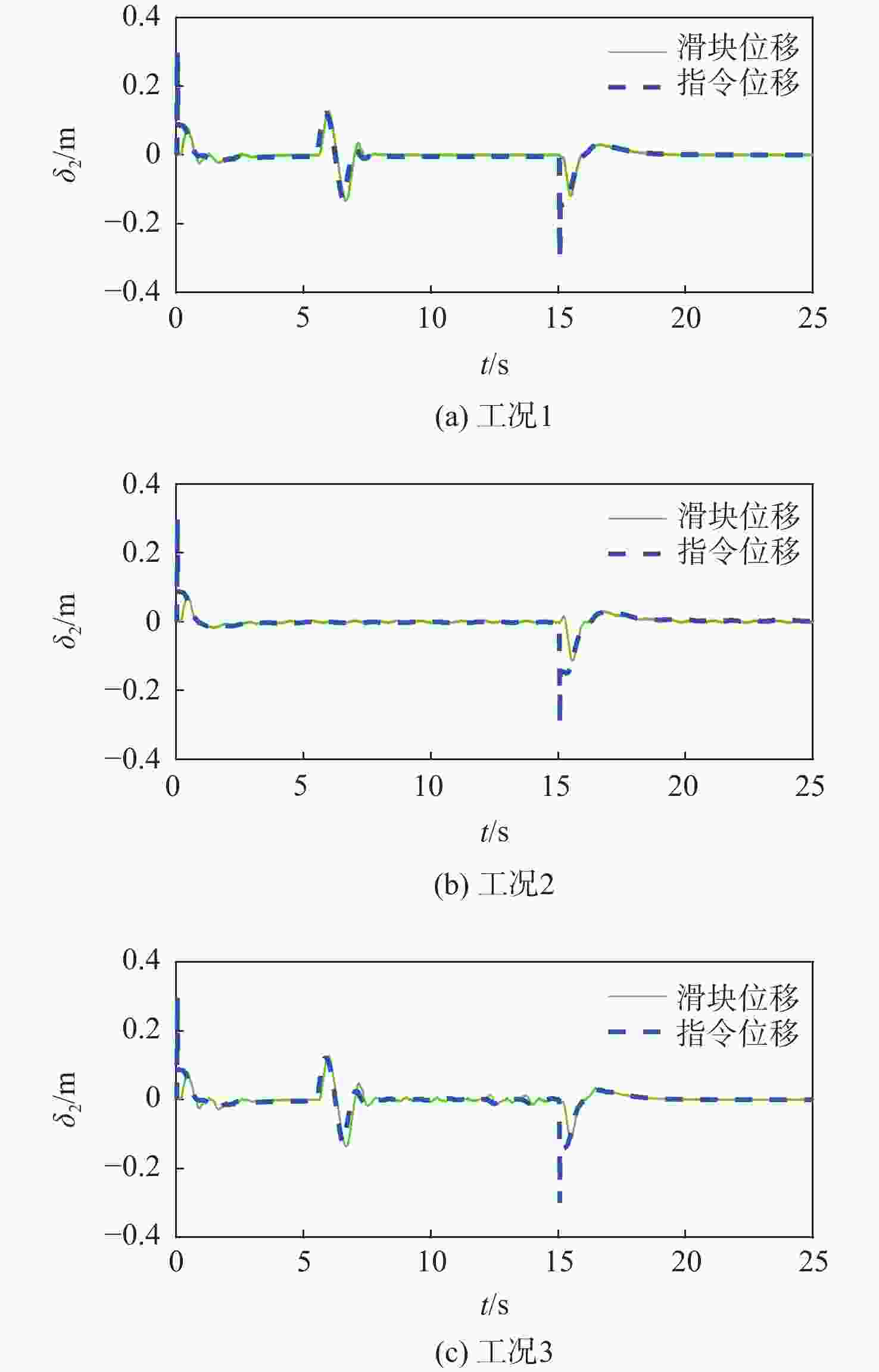
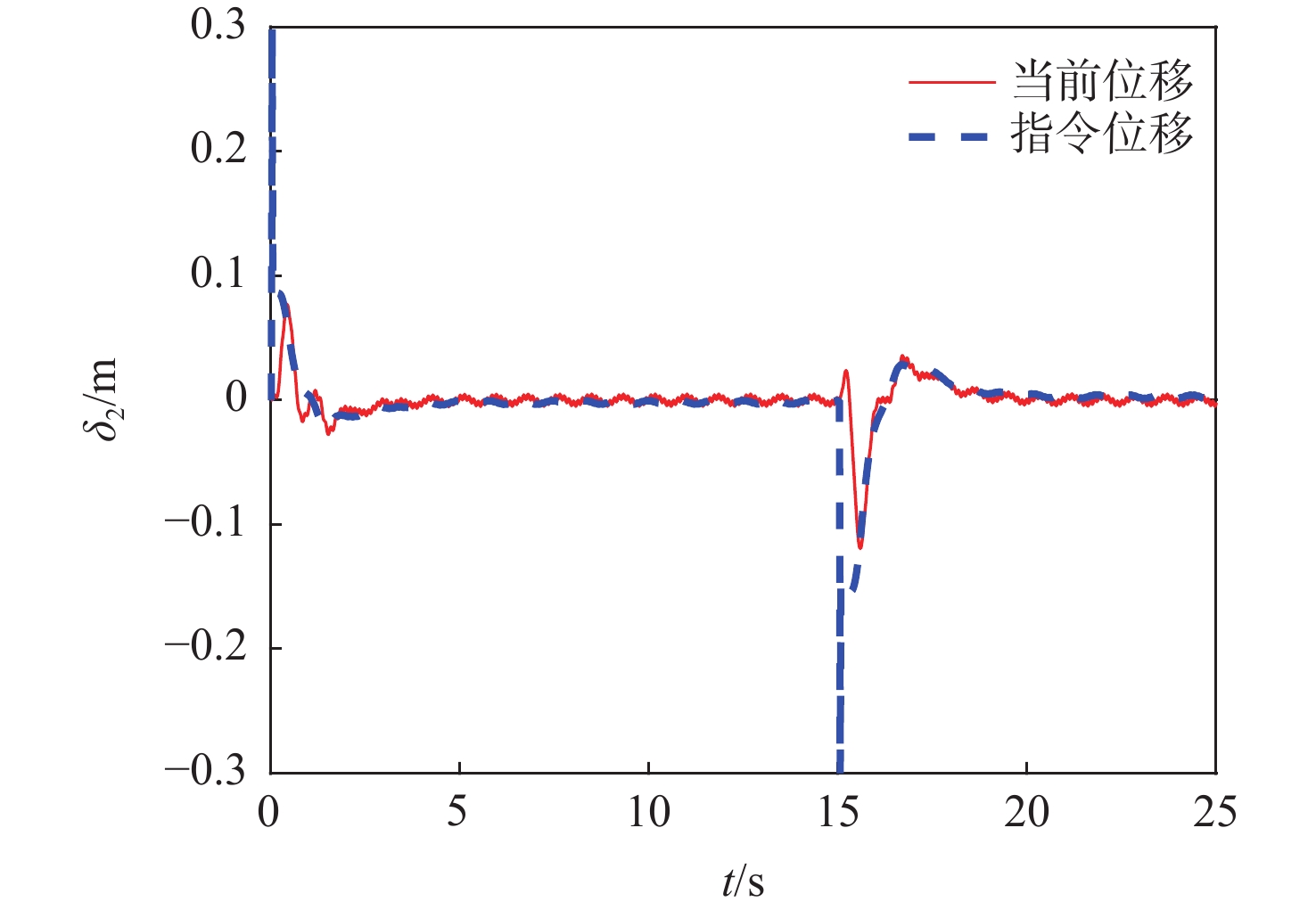
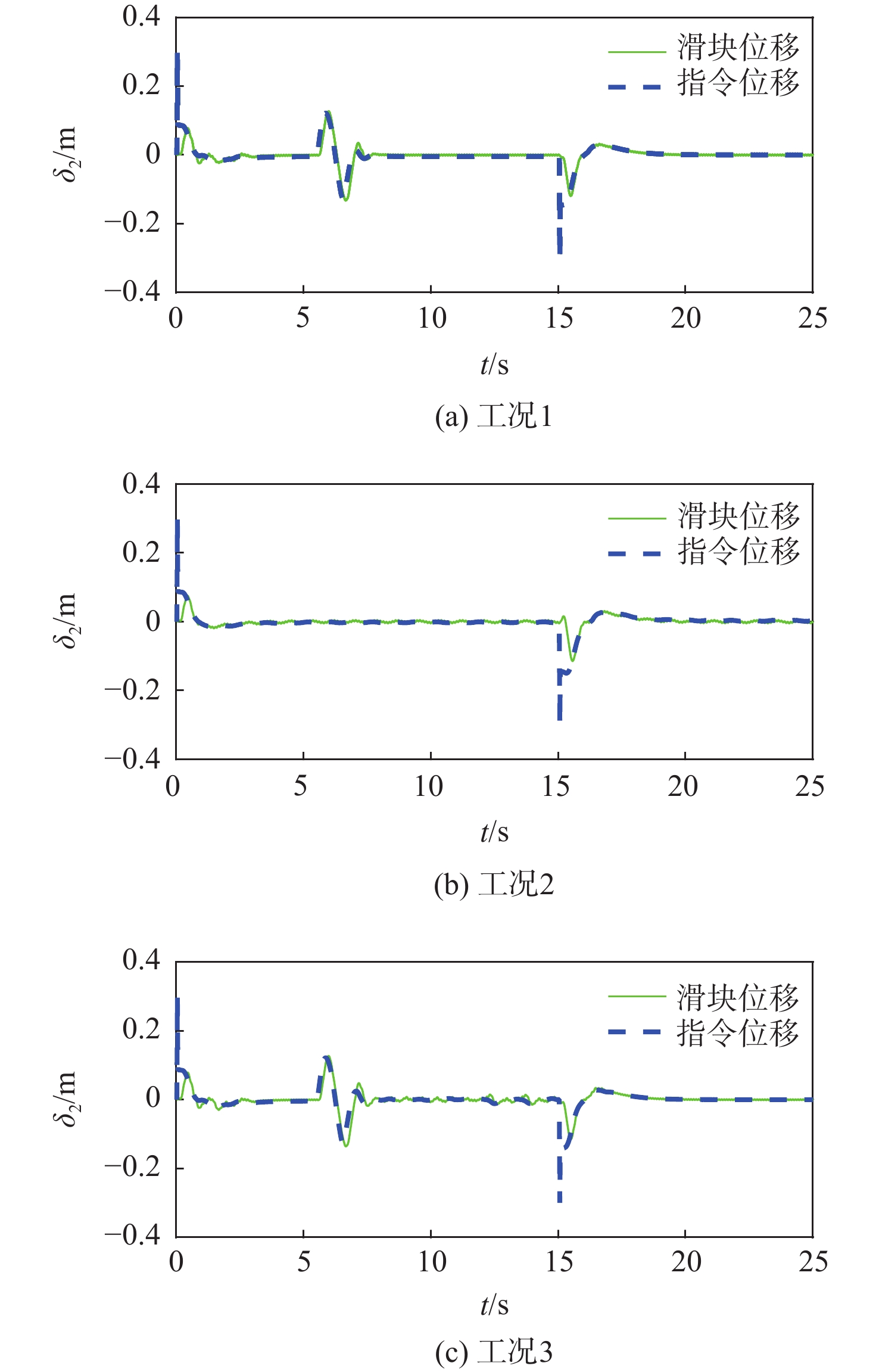
图 15 3种工况下滑块位置响应曲线
Figure 15. Response curves of slider position under three working conditions
表 1 仿真初始参数
Table 1. Initial parameters of simulation
参 数 数 值 机体质量/kg 10 机体转动惯量$ {I_{xx}} $/(kg·m2) 1.441 机体转动惯量Iyy/(kg·m2) 1.608 机体转动惯量Izz/(kg·m2) 2.886 旋翼臂长L/m 0.5 旋翼质心高度Z0/m 0.05 初始姿态角/rad $ {\left[ {\begin{array}{*{20}{c}} 0&0&0 \end{array}} \right]^{\mathrm{T}}} $ 初始角速度/(rad·s−1) $ {\left[ {\begin{array}{*{20}{c}} 0&0&0 \end{array}} \right]^{\mathrm{T}}} $ 滑块1与滑块2质量/kg 1 滑块初始最大行程/m 0.15 俯仰通道滑块初始位置/m $ {\left[ {\begin{array}{*{20}{c}} {{\delta _x}}&{0.02}&{0.02} \end{array}} \right]^{\mathrm{T}}} $ 滚转通道滑块初始位置/m $ {\left[ {\begin{array}{*{20}{c}} {0.02}&{{\delta _y}}&{0.02} \end{array}} \right]^{\mathrm{T}}} $  下载: 导出CSV
下载: 导出CSV
-
[1] SD A, JR A, AR B, et al. Configurations, flight mechanisms, and applications of unmanned aerial systems: A review[J]. Progress in Aerospace Sciences, 2020, 121: 100694. doi: 10.1016/j.paerosci.2020.100694 [2] SHAKHATREH H, SAWALMEH A, AI-FUQAHA A, et al. Unmanned aerial vehicles: A survey on civil applications and key research challenges[J]. IEEE Access, 2018, 7: 48572-48634. [3] KANISTRAS K, MARTINS G, RUTHERFORD M J, et al. A survey of unmanned aerial vehicles (UAVs) for traffic monitoring[M]. Berlin: Springer Netherlands, 2015: 8-15. [4] TB A, JM A, RMA B, et al. On-board implementation and experimental validation of collaborative transportation of loads with multiple UAVs-science direct[J]. Aerospace Science and Technology, 2020, 107: 106284. doi: 10.1016/j.ast.2020.106284 [5] ARIYIBI S O, TEKINAIP O. Quaternion-based nonlinear attitude control of quadrotor formations carrying a slung load[J]. Aerospace Science and Technology, 2020, 105(14): 105995. [6] VANDANIPOUR M, KHODABANEH M. Adaptive fractional order sliding mode control for a quadrotor with a varying load[J]. Aerospace Science and Technology, 2019, 86: 737-747. doi: 10.1016/j.ast.2019.01.053 [7] TOTOKI H, OCHI Y, SATO M, et al. Design and testing of a low-order flight control system for quad-tilt-wing UAV[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(10): 2426-2433. doi: 10.2514/1.G001577 [8] TRAN AT, SAKAMOTO N, SATO M, et al. Control augmentation system design for quad-tilt-wing unmanned aerial vehicle via robust output regulation method[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1): 357-369. doi: 10.1109/TAES.2017.2650618 [9] 李新凯, 张宏立, 范文慧. 非匹配扰动下变体无人机预设性能控制[J]. 航空学报, 2022, 43(2): 382-397. doi: 10.7527/j.issn.1000-6893.2022.2.hkxb202202031LI K X, ZHANG H L, FAN W H. Prescribed performance control for morphing aerospace vehicle under mismatched disturbances[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(2): 382-397(in Chinese). doi: 10.7527/j.issn.1000-6893.2022.2.hkxb202202031 [10] ERTURK S, DASKIRAN O, DOGAN A. Trim analysis of a moving-mass actuated airplane[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2012: 4647. [11] ERTURK S, DOGAN A. Trim analysis of a moving-mass actuated airplane in steady turn[C]//51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Reston: AIAA, 2013: 0622. [12] ERTURK S, DOGAN A. Trim analyses of mass-actuated airplane in cruise and steady-state turn[J]. Journal of Aircraft, 2017, 54(4): 1587-1594. doi: 10.2514/1.C034200 [13] ERTURK S, DOGAN A. Trim analyses of mass-actuated airplane in steady-state climb and descent[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2017: 1585. [14] 邱潇颀, 高长生, 荆武兴. 变质心固定翼无人机动力学分析与抗扰控制[J]. 北京航空航天大学学报, 2022, 48(3): 430-437.QIU X Q, GAO C S, JING W X. Dynamic analysis and disturbance rejection control of mass-actuated fixed-wing UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(3): 430-437(in Chinese). [15] HAUS T, ORSAG M, BOGDAN S. Design considerations for a large quadrotor with moving mass control[C]//2016 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2016: 1327-1334. [16] DARVISHPOOR S, ROSHANIAN J, TAYEFI M. A novel concept of VTOL bi-rotor UAV based on moving mass control[J]. Aerospace Science and Technology, 2020, 107: 106238. [17] IDRISSI M, SALAMI M, ANNAZ F. Modelling, simulation and control of a novel structure varying quadrotor[J]. Aerospace Science and Technology, 2021, 119: 107093. doi: 10.1016/j.ast.2021.107093 [18] 陆正亮. 快速机动卫星质量矩姿态控制技术研究[D]. 南京: 南京理工大学, 2018: 6-7.LU Z L. Study on mass moment attitude control for fast orbit maneuver satellite[D]. Nanjing: Nanjing University of Science and Technology, 2018: 6-7(in Chinese). [19] CHEN W H, BALLANCE D J. A nonlinear disturbance observer for robotic manipulators[J]. Industrial Electronics IEEE Transactions on Industrial Electronics, 2000, 47(4): 932-938. doi: 10.1109/41.857974 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 408
- HTML全文浏览量: 17
- PDF下载量: 16
- 被引次数: 0
