



Trajectory optimization of CSTBC UAV relay communication systems with no-fly zone constraints
-
摘要:
中继无人机的飞行路径对无人机中继通信系统的链路传输可靠性具有重要影响。为提高无人机中继通信系统链路传输的可靠性,提出协作空时分组编码(CSTBC)无人机中继通信方案,并以链路中断概率最小化准则为基础,提出中继无人机的航迹优化方法;理论分析给出系统遍历容量和分集增益;为保障中继无人机飞行安全,并获取信道的分集增益,提出无人机禁飞区规避方法。结果表明:协作空时分组编码无人机中继通信系统可充分获取信道的分集增益,改善无人机中继通信系统链路传输的可靠性。
Abstract:The flight path of an UAV has a significant effect on the performance of a UAV relay communication system. To increase transmission reliability, a cooperative space-time block coding (CSTBC) UAV relay communication transmission technique with no-fly zone restrictions is suggested. The outage probability of the UAV relay communication system is theoretically derived, and the UAV flight path is optimized to minimize the system’s outage probability. The UAV relay communication system’s ergodic capacity is also presented. In addition, we established a no-fly zone and provided an evasive mechanism to ensure cooperative UAV flight safety while obtaining the channel’s diversity gain. The simulation findings demonstrate that the cooperative space-time block coding-based UAV relay communication transmission method may get the channel’s diversity gain and enhance the system’s link transmission performance.
-
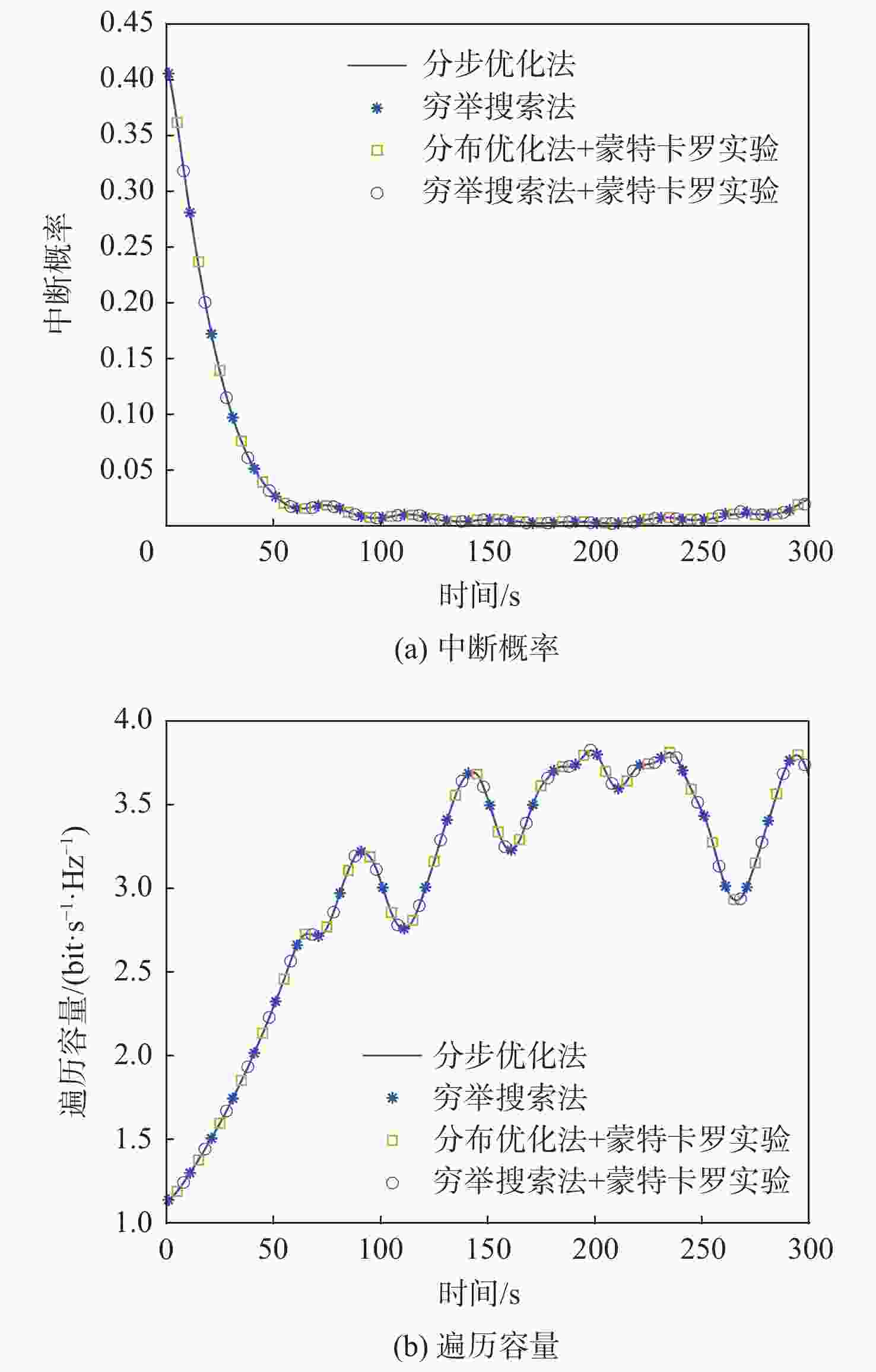
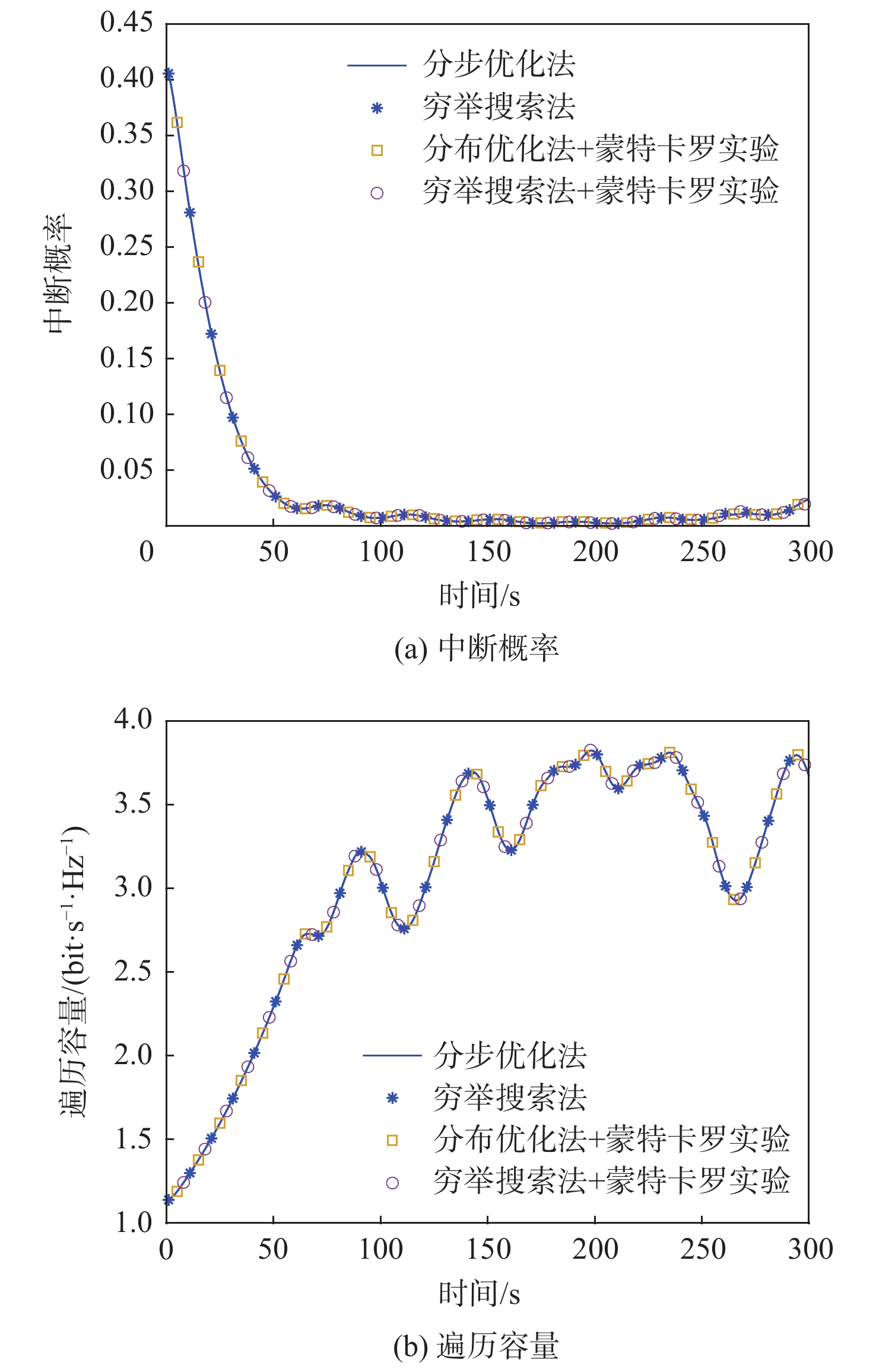
图 7 不同方法下中断概率与遍历容量
Figure 7. Interruption probability and ergodic capacity under different methods
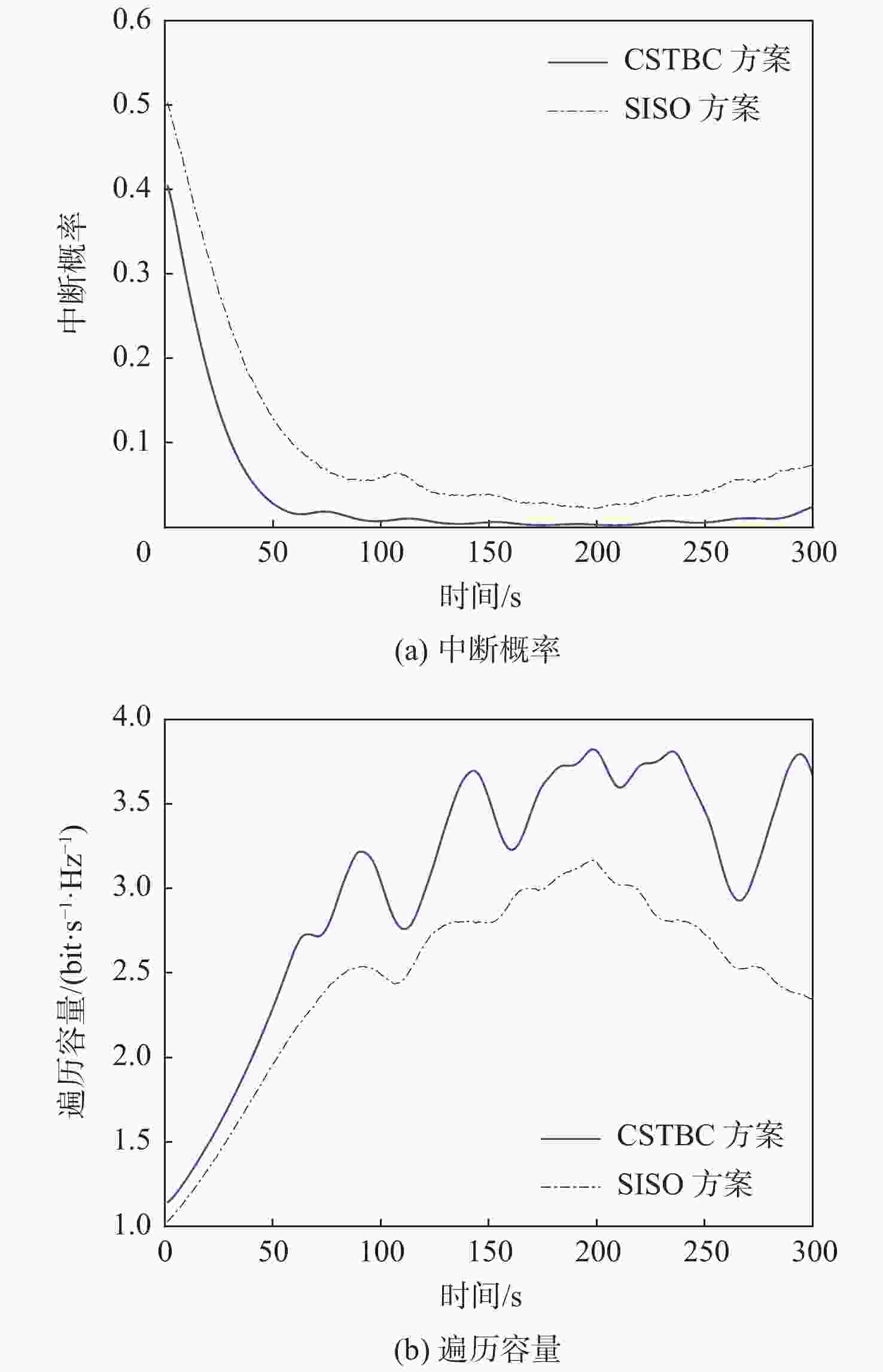
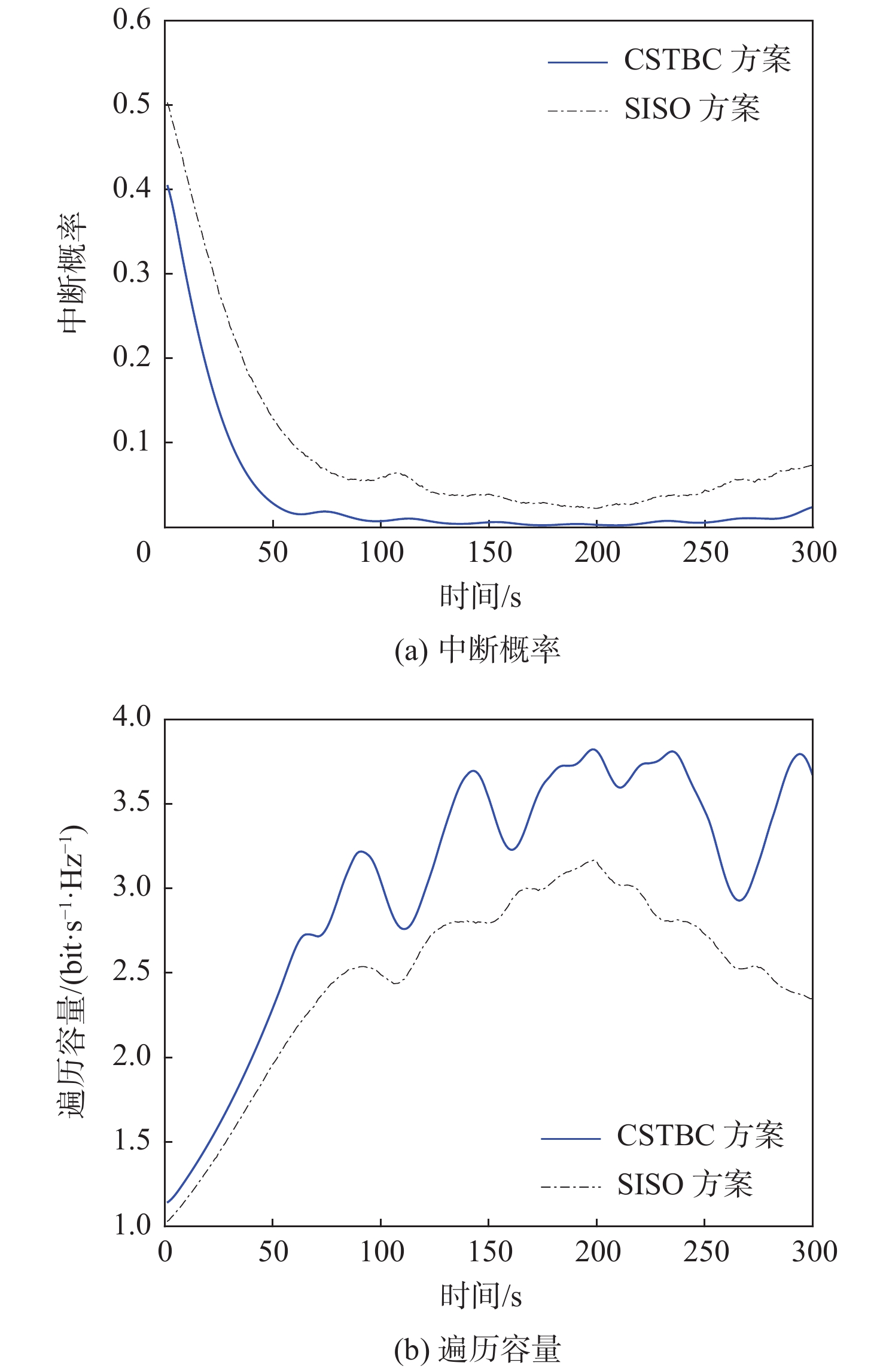
图 9 不同方案下中断概率与遍历容量
Figure 9. Interruption probability and ergodic capacity under different plans
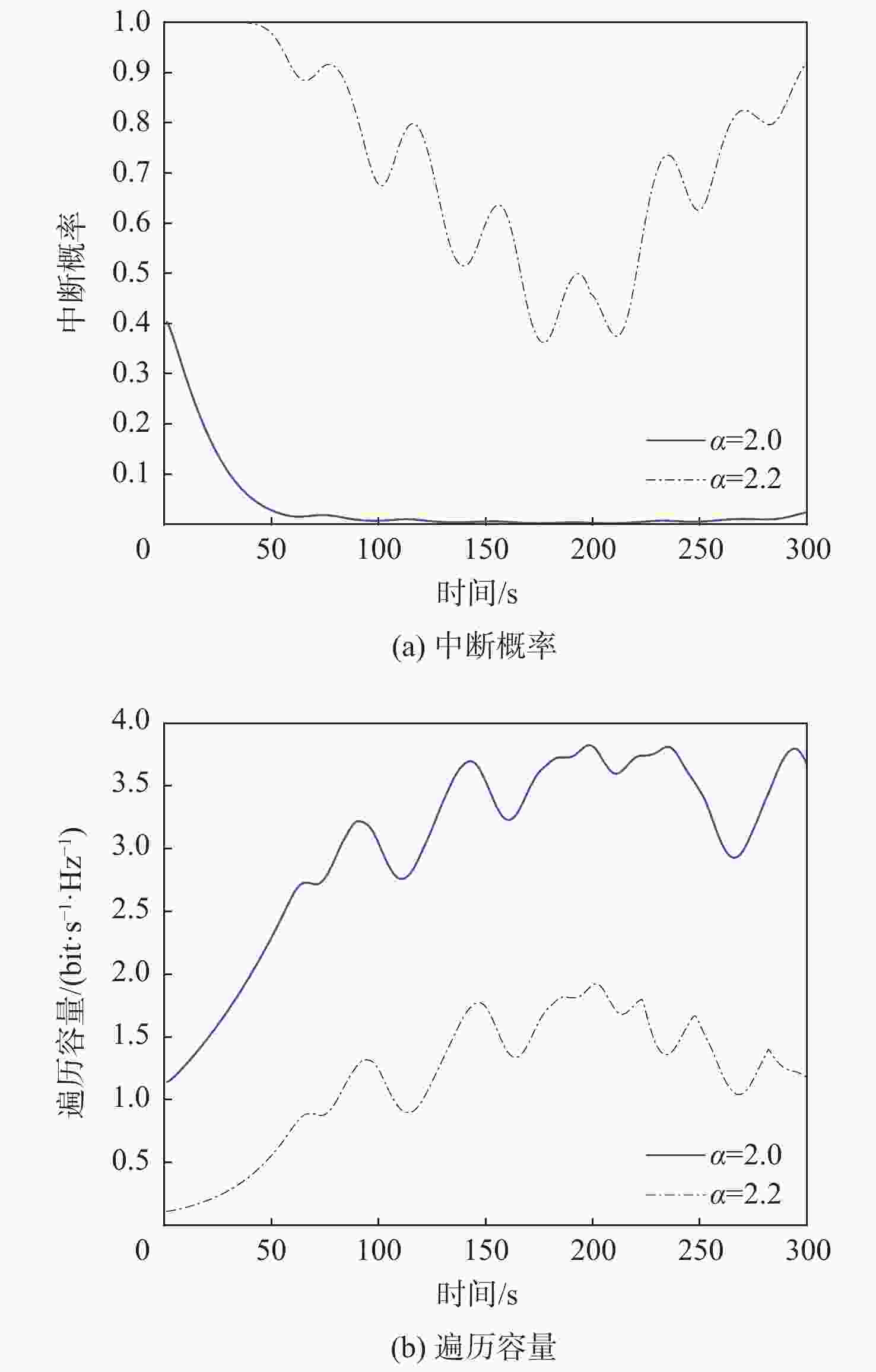
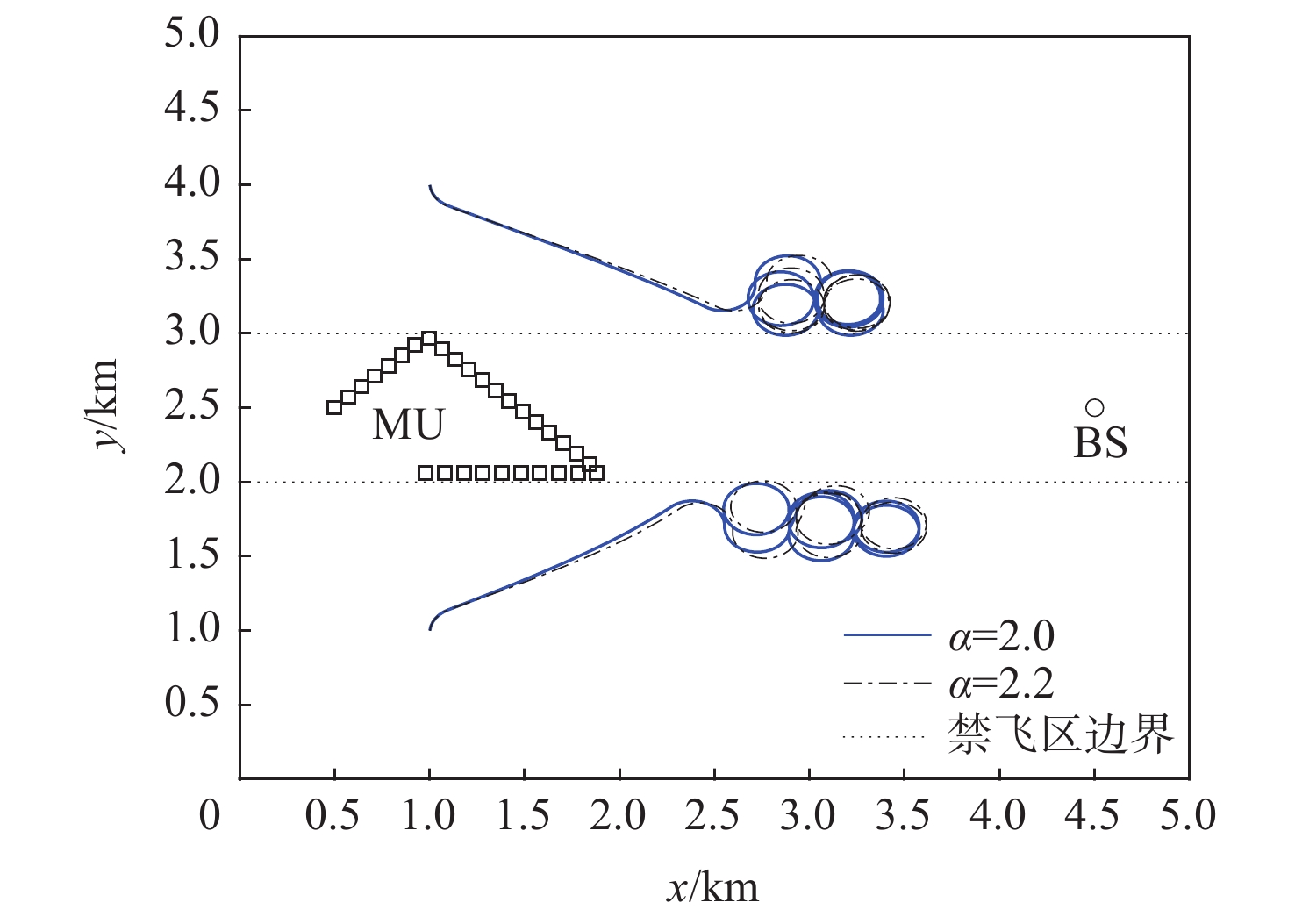
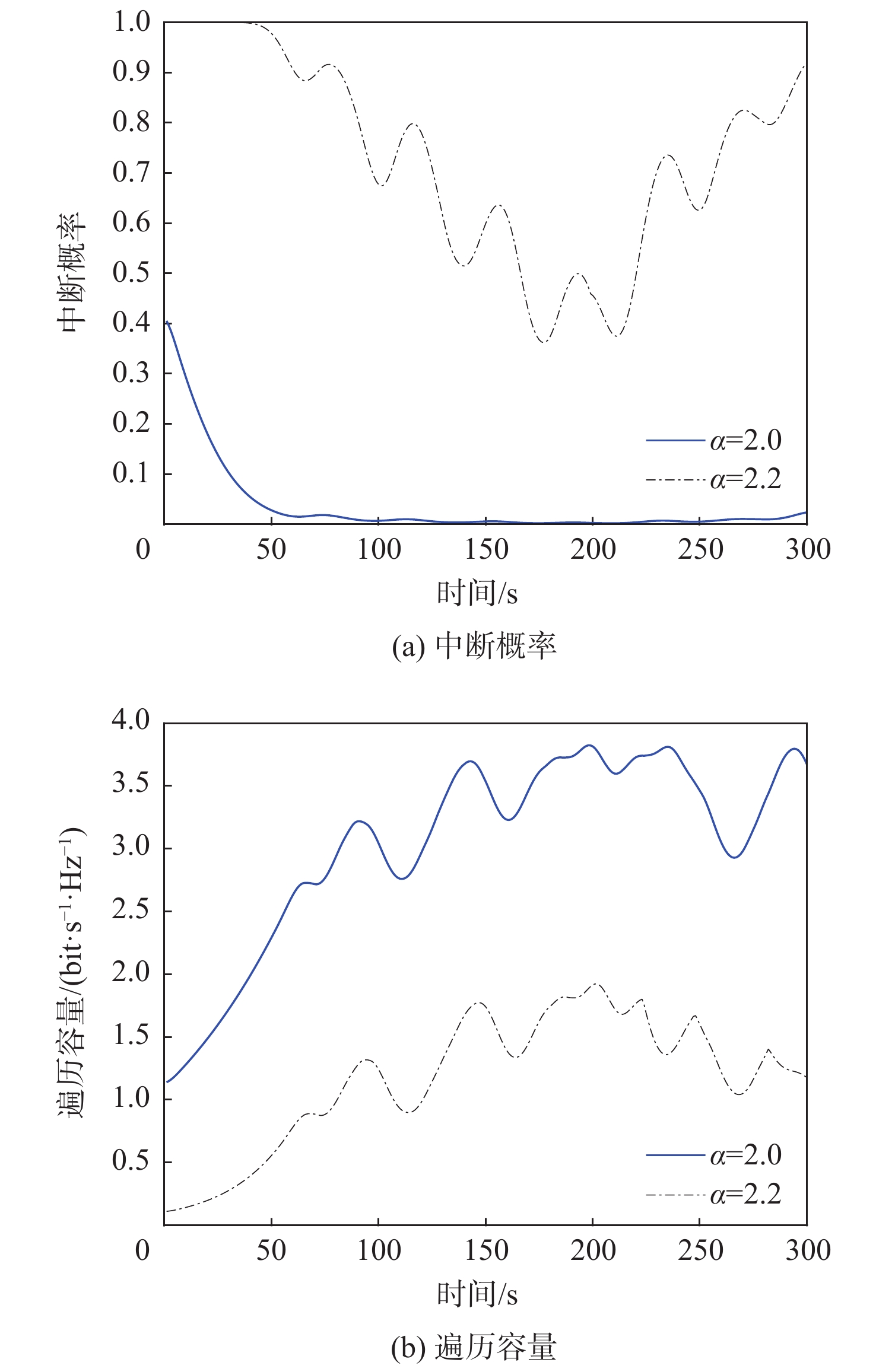
图 11 不同路径损耗因子时的中断概率与遍历容量
Figure 11. Interruption probability and ergodic capacity under different path loss factors
表 1 仿真参数设置
Table 1. Simulation parameter setting
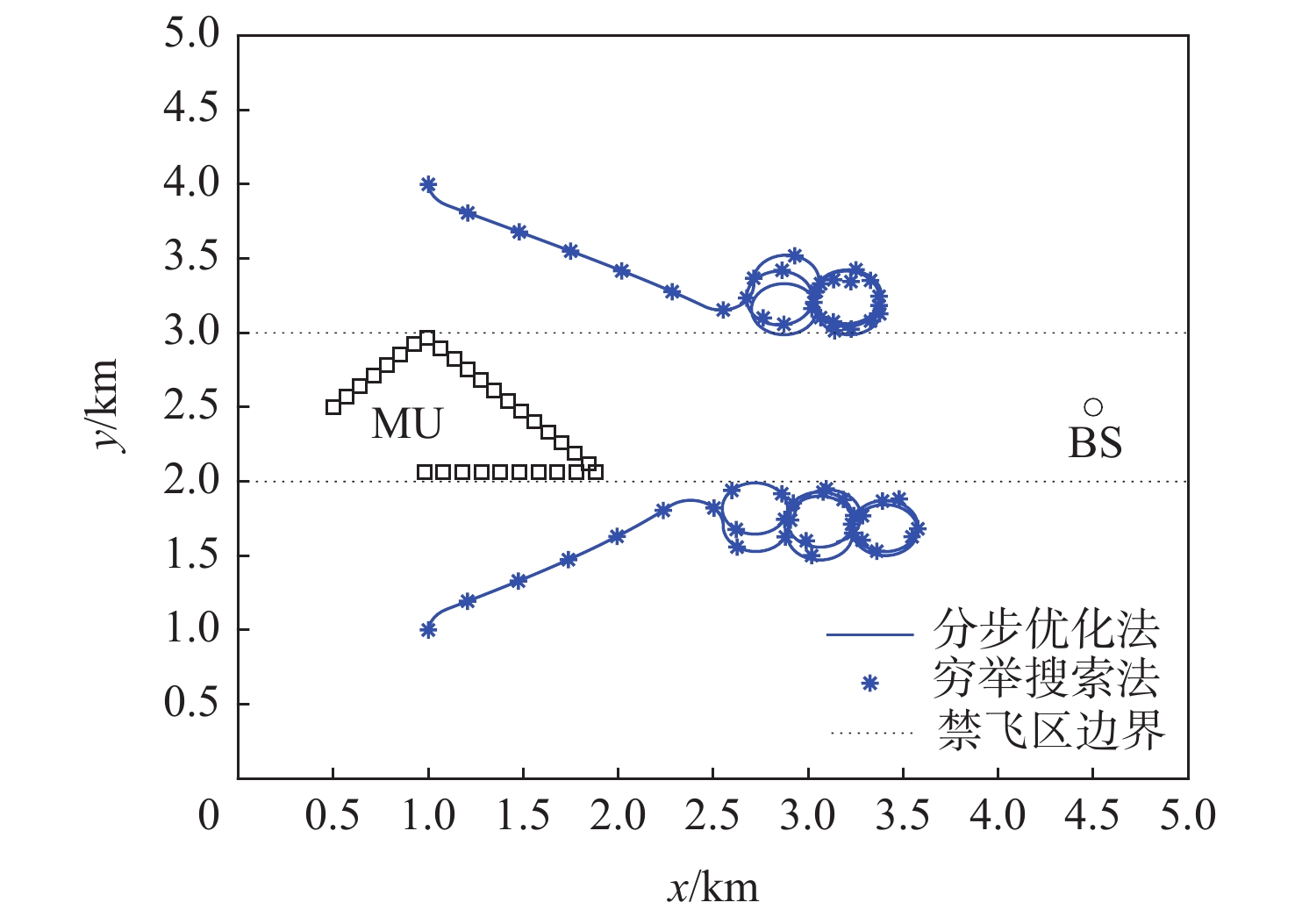
参数 数值 MU节点的初始位置坐标/m (500,2500,0) UAV1节点的初始位置坐标/m (1000,4000,350) UAV2节点的初始位置坐标/m (1000,1000,350) BS节点的初始位置坐标/m (4500,2500,0) MU节点的移动速度/(m·s−1) 10 无人机的飞行速度/(m·s−1) 30 禁飞区范围(y轴)/m 2000~3000 仿真时间/s 300 位置更新时间间隔$\Delta t $/s 1 路径损耗因子$ \alpha $ 2.0 MU节点发射功率/dB 150 无人机转发功率/dB 147 中断门限/dB 5  下载: 导出CSV
下载: 导出CSV
-
[1] SAAD W, BENNIS M, MOZAFFARI M, et al. Wireless communications and networking for unmanned aerial vehicles [M]. Cambridge: Cambridge University Press, 2020. [2] MOZAFFARI M, SAAD W, BENNIS M, et al. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems[J]. IEEE Communications Surveys & Tutorials, 2019, 21(3): 2334-2360. [3] SONG Q, ZHENG F C, ZENG Y, et al. Joint beamforming and power allocation for UAV-enabled full-duplex relay[J]. IEEE Transactions on Vehicular Technology, 2019, 68(2): 1657-1671. doi: 10.1109/TVT.2018.2889349 [4] LI B, ZHANG R, YANG L. Joint user scheduling and UAV trajectory optimization for full-duplex UAV relaying[C]//Proceedings of the IEEE International Conference on Communications. Piscataway: IEEE Press, 2021: 21175405. [5] JIANG X, WU Z, YIN Z, et al. Joint power and trajectory design for UAV-relayed wireless systems[J]. IEEE Wireless Communications Letters, 2019, 8(3): 697-700. doi: 10.1109/LWC.2018.2885056 [6] MA D, FENG Z, QIN Y. Optimization of throughput maximization of UAV as mobile relay communication system[C]//Proceedings of the International Conference on Virtual Reality and Intelligent Systems. Piscataway: IEEE Press, 2020: 21231307. [7] ZHOU L, ZHAO X, GUAN X, et al. Robust trajectory planning for UAV communication systems in the presence of jammers[J]. Chinese Journal of Aeronautics, 2022, 35(10): 265-274. doi: 10.1016/j.cja.2021.10.038 [8] JIAN O, YI Z, MIN L, et al. Optimization of beamforming and path planning for UAV-assisted wireless relay networks[J]. Chinese Journal of Aeronautics, 2014, 27(2): 313-320. doi: 10.1016/j.cja.2014.02.011 [9] 刘海涛, 赵文强, 李春鸣, 等. 空时分组编码的无人机中继通信航迹规划方法[J]. 航空学报, 2017, 38(9): 279-288. doi: 10.7527/S1000-6893.2017.321048LIU H T, ZHAO W Q, LI C M, et al. Path planning method for UAV relay communication system with space-time block coding[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(9): 279-288(in Chinese). doi: 10.7527/S1000-6893.2017.321048 [10] CHEN Q. Joint trajectory and resource optimization for UAV-enabled relaying systems[J]. IEEE Access, 2020, 8: 24108-24119. doi: 10.1109/ACCESS.2020.2970439 [11] 刘海涛, 顾新宇, 方晓钰, 等. 频率选择性衰落信道DS-CDMA无人机中继通信系统航迹规划[J]. 航空学报, 2019, 40(7): 149-158.LIU H T, GU X Y, FANG X Y, et al. Path planning for UAV relay communication systems with DS-CDMA over frequency selective fading channel[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(7): 149-158(in Chinese). [12] CHEN Y, ZHAO N, DING Z, et al. Multiple UAVs as relays: Multi-hop single link versus multiple dual-hop links[J]. IEEE Transactions on Wireless Communications, 2018, 17(9): 6348-6359. doi: 10.1109/TWC.2018.2859394 [13] 李冬霞, 李春鸣, 赵文强, 等. 无人机中继广播通信系统航迹优化方法[J]. 西安电子科技大学学报, 2018, 45(3): 160-166.LI D X, LI C M, ZHAO W Q, et al. Trajectory optimization method for UAV relaying broadcast communication system[J]. Journal of Xidian University, 2018, 45(3): 160-166(in Chinese). [14] ZHANG G C, WU Q Q, CUI M, et al. Securing UAV communications via trajectory optimization[C]//Proceedings of the IEEE Global Communications Conference. Piscataway: IEEE Press, 2017: 1-6. [15] SUN X F, SHEN C, CHANG T H, et al. Joint resource allocation and trajectory design for UAV-aided wireless physical layer security[C]//Proceedings of the IEEE Globecom Workshops. Piscataway: IEEE Press, 2018: 1-6. [16] WANG Q, CHEN Z, LI H, et al. Joint power and trajectory design for physical-layer secrecy in the UAV-aided mobile relaying system[J]. IEEE Access, 2018, 6: 62849-62855. doi: 10.1109/ACCESS.2018.2877210 [17] DONG R, WANG B, CAO K. Security enhancement of UAV swarm enabled relaying systems with joint beamforming and resource allocation[J]. China Communications, 2021, 18(9): 71-87. doi: 10.23919/JCC.2021.09.007 [18] XIAO L, XU Y, YANG D, et al. Secrecy energy efficiency maximization for UAV-enabled mobile relaying[J]. IEEE Transactions on Green Communications and Networking, 2020, 4(1): 180-193. doi: 10.1109/TGCN.2019.2949802 [19] ZHANG G, OU X, CUI M, et al. Cooperative UAV enabled relaying systems: Joint trajectory and transmit power optimization[J]. IEEE Transactions on Green Communications and Networking, 2022, 6(1): 543-557. doi: 10.1109/TGCN.2021.3108147 [20] LI Z. Trajectory optimization for UAV-enabled amplify-and-forward relaying system based on communication performance[C]//Proceedings of the IEEE International Conference on Artificial Intelligence and Computer Applications. Piscataway: IEEE Press, 2020: 19913516. [21] ZHANG G, YAN H, ZENG Y, et al. Trajectory optimization and power allocation for multi-hop UAV relaying communications[J]. IEEE Access, 2018, 6: 48566-48576. doi: 10.1109/ACCESS.2018.2868117 [22] ALAMOUTI S M. A simple transmit diversity technique for wireless communications[J]. IEEE Journal on Selected Areas in Communications, 1998, 16(8): 1451-1458. doi: 10.1109/49.730453 [23] DUBINS L E. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents[J]. American Journal of Mathematics, 1957, 79(3): 497-516. doi: 10.2307/2372560 [24] RUI X. Capacity analysis of decode-and-forward protocol with partial relay selection[C]//Proceedings of the International Conference on Wireless Communications & Signal Processing. Piscataway: IEEE Press, 2010: 11652227. -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 218
- HTML全文浏览量: 86
- PDF下载量: 25
- 被引次数: 0
