



-
摘要:
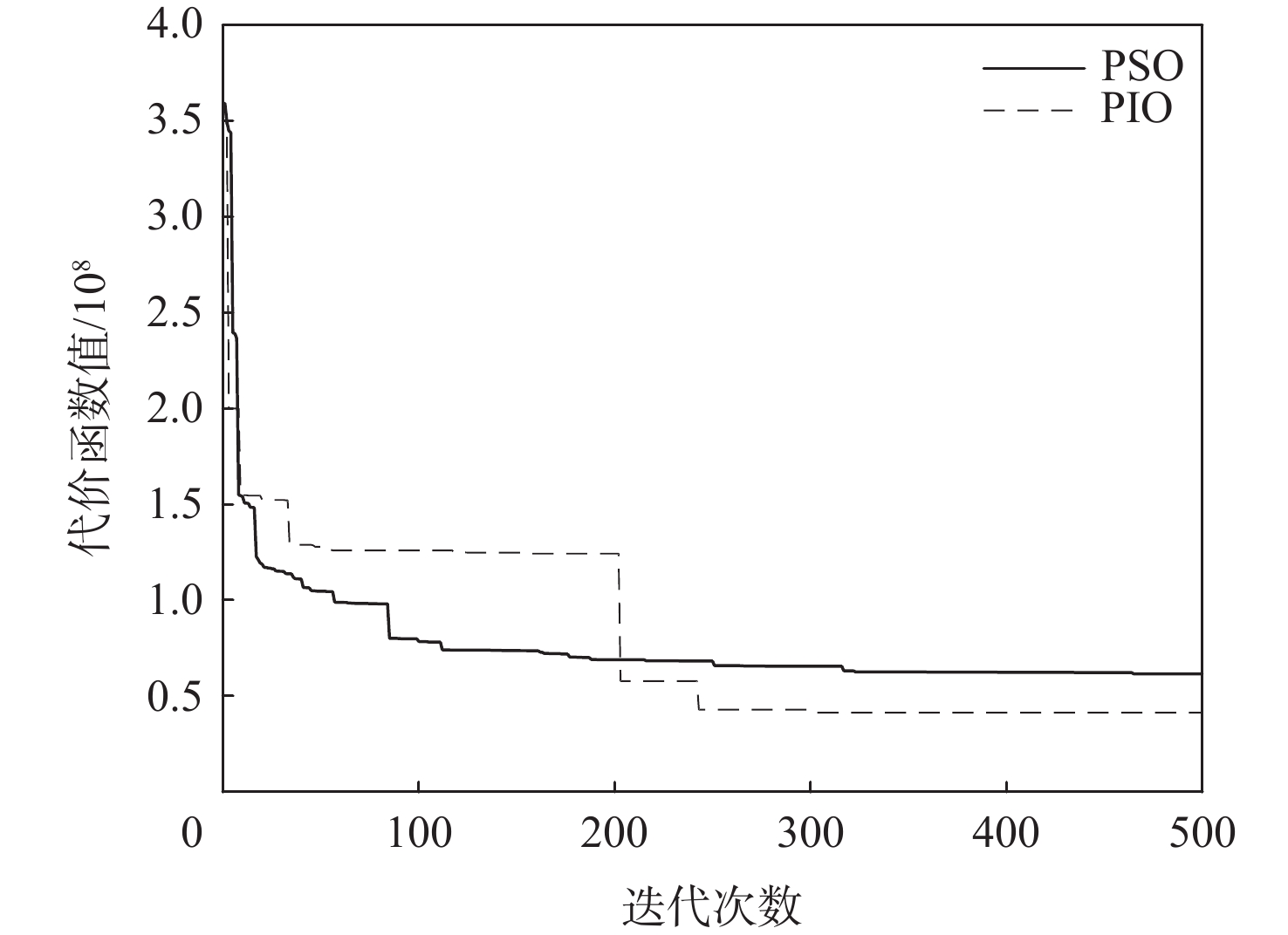
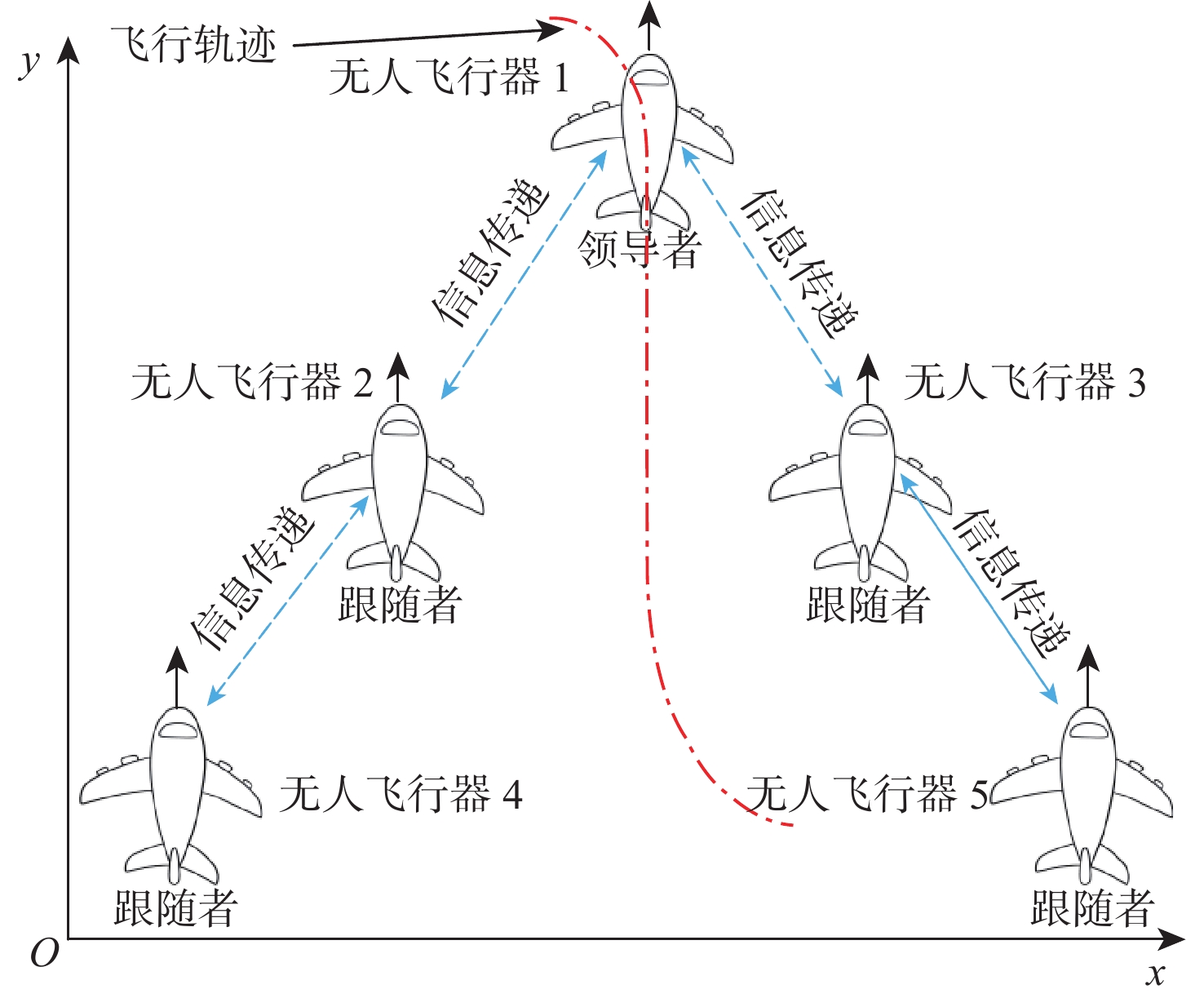
针对存在各种障碍条件下的战场环境,为实现无人飞行器集群安全避障并进行快速精确打击,集群必须具备自主队形重构的能力。因此,建立了无人飞行器运动模型与领航跟随集群编队控制结构,并提出基于模型预测控制(MPC)框架的无人飞行器集群编队重构控制代价函数、避障代价函数及避碰代价函数,进一步运用鸽群优化(PIO)算法对重构问题进行优化求解。基于数值对比仿真实验结果,所提算法在集群编队跟踪误差和寻优速度方面表现出色。结果表明:所提算法能实现集群自主重构,并提高MPC方法的效率。
Abstract:To realize security and accurate strikes under the battlefield environment with various obstacles, unmanned aerial vehicle swarm must possess the ability of self-formation reconfiguration. The unmanned aerial vehicle movement model and leader follower swarm formation control structure are established. The cost functions of unmanned aerial vehicle swarm formation control, obstacle avoidance and collision avoidance are proposed based upon the model predictive control (MPC) framework. The pigeon inspired optimization (PIO) algorithm is used to optimize the swarm formation reconfiguration control. Based on the results of numerical comparative simulations, the proposed algorithm has shown excellent performance in formation tracking error and optimization speed. The results indicate that the proposed algorithm is able to achieve autonomous formation reconstruction and significantly enhance the efficiency of the MPC method.
-
表 1 无人飞行器初始状态
Table 1. Initial state of UAV
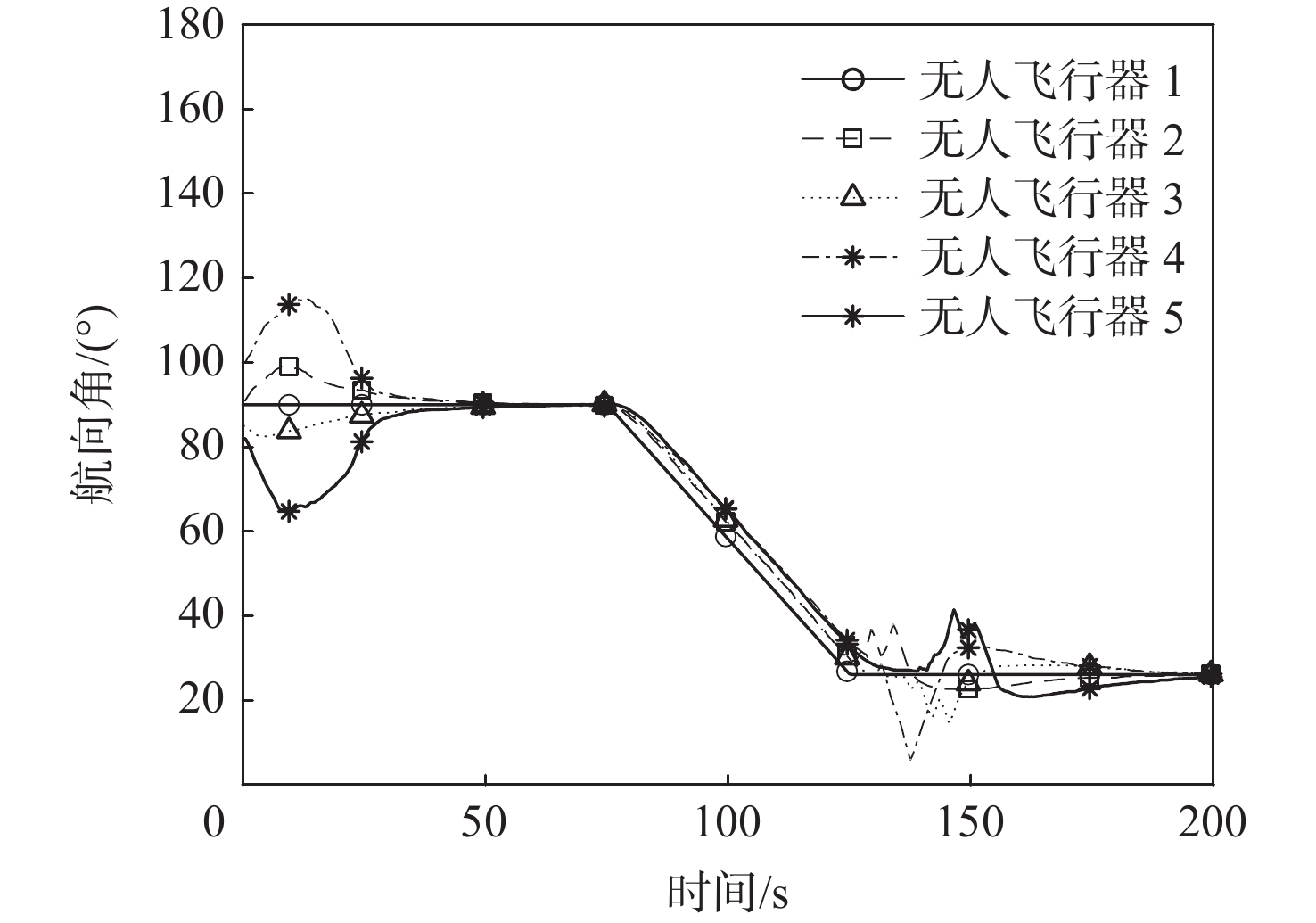
无人飞行器 $\left( {x,y} \right)/{\mathrm{km}}$ $ v/ ( {{\mathrm{m}} \cdot {{\mathrm{s}}^{ - 1}}} ) $ $ \chi /\left( ^\circ \right) $ $ \alpha /\left( ^\circ \right) $ 无人飞行器1 $\left( {3.8,4.1} \right)$ $160$ 90 0 无人飞行器2 $ \left( {2.8,4.9} \right) $ $199$ 85 0 无人飞行器3 $ \left( {3.2,3.4} \right) $ $202$ 91 0 无人飞行器4 $ \left( {1.8,6.5} \right) $ $201$ 100 0 无人飞行器5 $ \left( {1.9,1.7} \right) $ $196$ 82 0  下载: 导出CSV
下载: 导出CSV
表 2 集群编队期望构型
Table 2. Expected configuration of swarm formation
编队期望构型 $ {\rho ^{\mathrm{d}}}/{\mathrm{m}} $ $ {\theta ^{\mathrm{d}}}/\left( ^\circ \right) $ 无人飞行器1-2 500 30 无人飞行器1-3 500 −30 无人飞行器1-4 1000 30 无人飞行器1-5 1000 −30
下载: 导出CSV
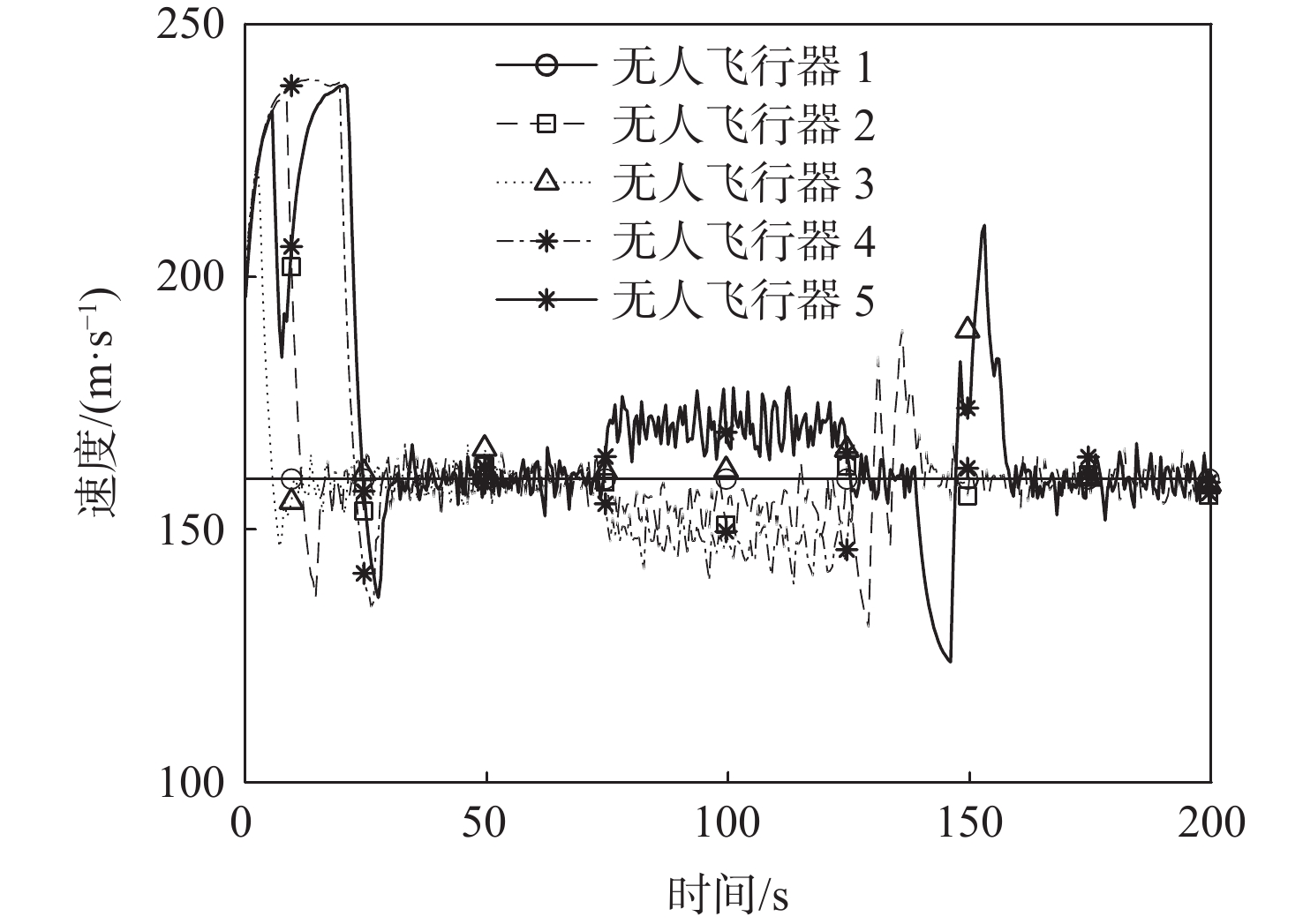
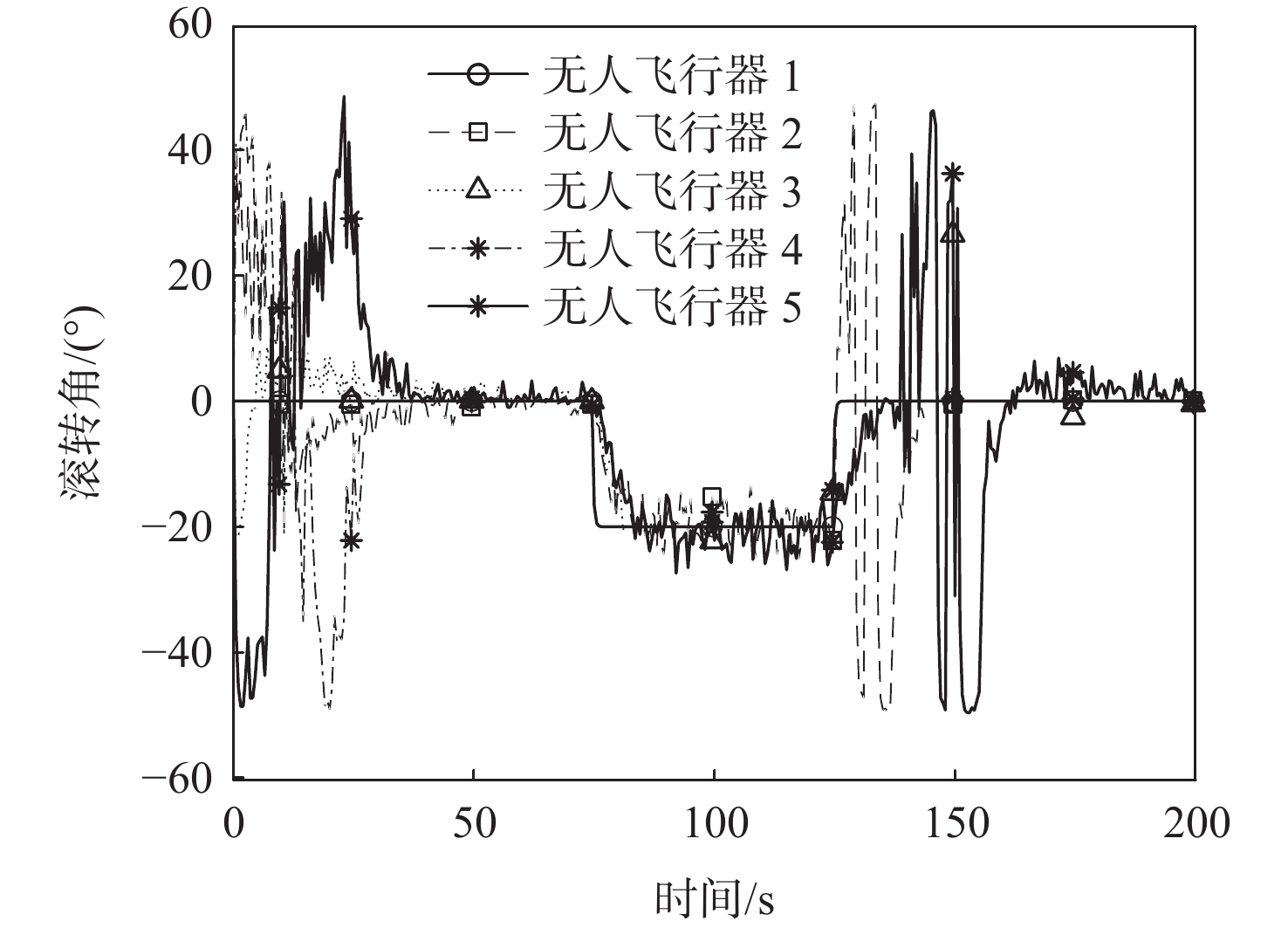
表 3 领导者无人飞行器预定飞行速度与滚转角
Table 3. Pre-set speed and roll angle of leader UAV
时间段/s $ {v_{\mathrm{L}}}/ ( {{\mathrm{m}} \cdot {{\mathrm{s}}^{ - 1}}} ) $ $ {\alpha _{\mathrm{L}}}/\left( ^\circ \right) $ 0~74.5 $160$ 0 75~124.5 $160$ −20 125~200 $160$ 0
下载: 导出CSV
表 4 约束条件
Table 4. Constraint condition
${v_{\min }}$/(m·s−1) vmax/(m·s−1) $\Delta {v_{\max }}$/(m·s−2) ${\chi _{\min }}$/(°) ${\chi _{\max }}$/(°) $\Delta {\chi _{\max }}$/((°)·s−1) ${\alpha _{\min }}$/(°) ${\alpha _{{{\mathrm{m}}} {\text{ax}}}}$/(°) $\Delta {\alpha _{\max }}$/((°)·s−1) $120$ $240$ $50$ $0$ $360$ $15$ $ - 50$ $50$ $100$
下载: 导出CSV
表 5 无人飞行器模型参数与避障避碰参数
Table 5. Model parameters of UAV model & parameters of obstacle avoidance and collision avoidance
${\beta _v}$ ${\beta _\alpha }$ $ {r_{{j_1}}} $ $ {r_{{j_2}}} $ 3.0 0.6 0.4 0.4
下载: 导出CSV
表 6 MPC、PIO及PSO算法参数
Table 6. Parameters of MPC, PIO and PSO
算法 $ {{\boldsymbol{Q}}_{{\text{F1}}}} $ $ {{\boldsymbol{Q}}_{{\text{F2}}}} $ $ {{\boldsymbol{Q}}_{{\text{F3}}}} $ $ {{\boldsymbol{Q}}_{{\text{F4}}}} $ $ {{\boldsymbol{Q}}_{{\text{F5}}}} $ $ {{\boldsymbol{R}}_{{\text{F1}}}} $ MPC diag[0.4 0.4 0.05] diag[0.1 0.1 0.04] diag[0.1 0.1 0.03] diag[0.1 0.1 0.02] diag[0.1 0.1 0.01] diag[0.0004 0.0004] PIO PSO 算法 $ {{\boldsymbol{R}}_{{{\text{F}}_{\text{2}}}}} $ $ {{\boldsymbol{R}}_{{\text{F3}}}} $ $ {{\boldsymbol{R}}_{{\text{F4}}}} $ $ {N_{{\text{r}} 1 {\mathrm{max}} }} $ $ {N_{{\text{r2max}}}} $ $ P $ MPC diag[0.0003 0.0003] diag[0.0002 0.0002] diag[0.0001 0.0001] PIO 300 30 0.2 PSO 算法 $ {N_{{\mathrm{P}} - {\mathrm{pio}}}} $ $ {N_{{\mathrm{P}} - {\mathrm{pso}}}} $ $ {N_{\mathrm{c}}} $ $ {w_{{\mathrm{pso}}}} $ $ {c_1} $ $ {c_2} $ MPC PIO 120 PSO 120 500 0.8 2.0 2.0
下载: 导出CSV
-
[1] DUAN H B, ZHAO J X, DENG Y M, et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 706-720. doi: 10.1109/TAES.2020.3029624 [2] NEW W K, LEOW C Y, NAVAIE K, et al. Application of NOMA for cellular-connected UAVs: Opportunities and challenges[J]. Science China Information Sciences, 2021, 64(4): 140302. doi: 10.1007/s11432-020-2986-8 [3] LIU Y Y, MONTENBRUCK J M, ZELAZO D, et al. A distributed control approach to formation balancing and maneuvering of multiple multirotor UAVs[J]. IEEE Transactions on Robotics, 2018, 34(4): 870-882. doi: 10.1109/TRO.2018.2853606 [4] HOANG V T, PHUNG M D, DINH T H, et al. System architecture for real-time surface inspection using multiple UAVs[J]. IEEE Systems Journal, 2020, 14(2): 2925-2936. doi: 10.1109/JSYST.2019.2922290 [5] ZHOU R, FENG Y, DI B, et al. Multi-UAV cooperative target tracking with bounded noise for connectivity preservation[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21(10): 1494-1503. [6] DONG X W, LI Y F, LU C, et al. Time-varying formation tracking for UAV swarm systems with switching directed topologies[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(12): 3674-3685. doi: 10.1109/TNNLS.2018.2873063 [7] GONG J Y, MA Y J, JIANG B, et al. Fault-tolerant formation tracking control for heterogeneous multiagent systems with directed topology[J]. Guidance, Navigation and Control, 2021, 1(1): 2150001. doi: 10.1142/S2737480721500011 [8] KHOSHNOUD F, ESAT I I, DE SILVA C W, et al. Self-powered solar aerial vehicles: Towards infinite endurance UAVs[J]. Unmanned Systems, 2020, 8(2): 95-117. doi: 10.1142/S2301385020500077 [9] 沈林成, 王祥科, 朱华勇, 等. 基于拟态物理法的无人机集群与重构控制[J]. 中国科学(技术科学), 2017, 47(3): 266-285. doi: 10.1360/N092016-00161SHEN L C, WANG X K, ZHU H Y, et al. UAVs flocking and reconfiguration control based on artificial physics[J]. Scientia Sinica (Technologica), 2017, 47(3): 266-285(in Chinese). doi: 10.1360/N092016-00161 [10] 卢燕梅, 宗群, 张秀云, 等. 集群无人机队形重构及虚拟仿真验证[J]. 航空学报, 2020, 41(4): 323580.LU Y M, ZONG Q, ZHANG X Y, et al. Formation reconstruction and virtual simulation verification of swarm UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 323580(in Chinese). [11] LIAO F, TEO R, WANG J L, et al. Distributed formation and reconfiguration control of VTOL UAVs[J]. IEEE Transactions on Control Systems Technology, 2017, 25(1): 270-277. doi: 10.1109/TCST.2016.2547952 [12] LI B, ZHANG J W, DAI L, et al. A hybrid offline optimization method for reconfiguration of multi-UAV formations[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 506-520. doi: 10.1109/TAES.2020.3024427 [13] 宫勋, 赵常均, 王丽, 等. 基于双观测器并行结构的四旋翼无人机故障检测与重构[J]. 控制与决策, 2015, 30(7): 1214-1218.GONG X, ZHAO C J, WANG L, et al. Faults detection and reconstruction for quad-rotor aircraft based on double-observers parallel structure[J]. Control and Decision, 2015, 30(7): 1214-1218(in Chinese). [14] 毛琼, 李小民, 王正军. 基于规则的无人机编队队形构建与重构控制方法[J]. 系统工程与电子技术, 2019, 41(5): 1118-1126.MAO Q, LI X M, WANG Z J. Formation and reformation control method for UAVs formation shape based on rules[J]. Systems Engineering and Electronics, 2019, 41(5): 1118-1126(in Chinese). [15] WANG X H, ZHANG Y, WANG L Z, et al. Robustness evaluation method for unmanned aerial vehicle swarms based on complex network theory[J]. Chinese Journal of Aeronautics, 2020, 33(1): 352-364. doi: 10.1016/j.cja.2019.04.025 [16] LIU H X, LIU F, ZHANG X J, et al. A formation reconfiguration algorithm for multi-UAVs based on distributed cooperative coevolutionary with an adaptive grouping strategy[J]. Chinese Journal of Electronics, 2020, 29(5): 841-851. doi: 10.1049/cje.2020.07.006 [17] 马小山, 董文瀚, 李炳乾. 考虑拓扑故障的无人机编队容错控制方法研究[J]. 西北工业大学学报, 2020, 38(5): 1084-1093. doi: 10.1051/jnwpu/20203851084MA X S, DONG W H, LI B Q. A fault-tolerant control method for unmanned aerial vehicle (UAV) formation with topological faults considered[J]. Journal of Northwestern Polytechnical University, 2020, 38(5): 1084-1093(in Chinese). doi: 10.1051/jnwpu/20203851084 [18] 周子为, 段海滨, 范彦铭. 仿雁群行为机制的多无人机紧密编队[J]. 中国科学(技术科学), 2017, 47(3): 230-238. doi: 10.1360/N006-00138ZHOU Z W, DUAN H B, FAN Y M. Unmanned aerial vehicle close formation control based on the behavior mechanism in wild geese[J]. Scientia Sinica (Technologica), 2017, 47(3): 230-238(in Chinese). doi: 10.1360/N006-00138 [19] 马思迁, 董朝阳, 马鸣宇, 等. 基于自适应通信拓扑四旋翼无人机编队重构控制[J]. 北京航空航天大学学报, 2018, 44(4): 841-850.MA S Q, DONG C Y, MA M Y, et al. Formation reconfiguration control of quadrotor UAVs based on adaptive communication topology[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(4): 841-850(in Chinese). [20] 茹常剑, 魏瑞轩, 戴静, 等. 基于纳什议价的无人机编队自主重构控制方法[J]. 自动化学报, 2013, 39(8): 1349-1359.RU C J, WEI R X, DAI J, et al. Autonomous reconfiguration control method for UAV’s formation based on Nash bargain[J]. Acta Automatica Sinica, 2013, 39(8): 1349-1359(in Chinese). [21] 王寅, 王道波, 王建宏. 基于凸优化理论的无人机编队自主重构算法研究[J]. 中国科学(技术科学), 2017, 47(3): 249-258. doi: 10.1360/N092016-00194WANG Y, WANG D B, WANG J H. A convex optimization based method for multiple UAV autonomous formation reconfiguration[J]. Scientia Sinica (Technologica), 2017, 47(3): 249-258(in Chinese). doi: 10.1360/N092016-00194 [22] 顾伟, 汤俊, 白亮, 等. 面向时间协同的多无人机队形变换最优效率模型[J]. 航空学报, 2019, 40(6): 322599.GU W, TANG J, BAI L, et al. Time synergistic optimal efficiency model for formation transformation of multiple UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(6): 322599(in Chinese). [23] 李樾, 韩维, 陈清阳, 等. 基于快速扩展随机树算法的多无人机编队重构方法研究[J]. 西北工业大学学报, 2019, 37(3): 601-611. doi: 10.1051/jnwpu/20193730601LI Y, HAN W, CHEN Q Y, et al. Research on formation reconfiguration of UAVs based on RRT algorithm[J]. Journal of Northwestern Polytechnical University, 2019, 37(3): 601-611(in Chinese). doi: 10.1051/jnwpu/20193730601 [24] 席裕庚, 李德伟, 林姝. 模型预测控制−现状与挑战[J]. 自动化学报, 2013, 39(3): 222-236. doi: 10.1016/S1874-1029(13)60024-5XI Y G, LI D W, LIN S. Model predictive control—Status and challenges[J]. Acta Automatica Sinica, 2013, 39(3): 222-236(in Chinese). doi: 10.1016/S1874-1029(13)60024-5 [25] 周绍磊, 康宇航, 史贤俊, 等. 基于RQPSO-DMPC的多无人机编队自主重构控制方法[J]. 北京航空航天大学学报, 2017, 43(10): 1960-1971.ZHOU S L, KANG Y H, SHI X J, et al. Autonomous reconfiguration control method for multi-UAV formation based on RQPSO-DMPC[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 1960-1971(in Chinese). [26] 赵超轮, 戴邵武, 赵国荣, 等. 基于分布式模型预测控制的无人机编队控制[J]. 控制与决策, 2022, 37(7): 1763-1771.ZHAO C L, DAI S W, ZHAO G R, et al. Formation control of multi-UAV based on distributed model predictive[J]. Control and Decision, 2022, 37(7): 1763-1771(in Chinese). [27] LEE S M, KIM H, MYUNG H, et al. Cooperative coevolutionary algorithm-based model predictive control guaranteeing stability of multirobot formation[J]. IEEE Transactions on Control Systems Technology, 2015, 23(1): 37-51. doi: 10.1109/TCST.2014.2312324 [28] XIAO H Z, CHEN C L P. Incremental updating multirobot formation using nonlinear model predictive control method with general projection neural network[J]. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4502-4512. doi: 10.1109/TIE.2018.2864707 [29] FRANZÈ G, CASAVOLA A, FAMULARO D, et al. Distributed receding horizon control of constrained networked leader-follower formations subject to packet dropouts[J]. IEEE Transactions on Control Systems Technology, 2018, 26(5): 1798-1809. doi: 10.1109/TCST.2017.2723869 [30] 闫飞, 李浦, 续欣莹. 基于迭代学习与模型预测控制的交通信号混合控制方法[J]. 控制理论与应用, 2021, 38(3): 339-348.YAN F, LI P, XU X Y. Traffic signal hybrid control method based on iterative learning and model predictive control[J]. Control Theory & Applications, 2021, 38(3): 339-348(in Chinese). [31] 张方方, 陈波, 班旋旋, 等. 基于生物启发神经网络和DMPC的多机器人协同搜索算法[J]. 控制与决策, 2021, 36(11): 2699-2706.ZHANG F F, CHEN B, BAN X X, et al. Multi-robot cooperative search algorithm based on bio-inspired neural network and DMPC[J]. Control and Decision, 2021, 36(11): 2699-2706(in Chinese). [32] DUAN H B, QIAO P X. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7(1): 24-37. doi: 10.1108/IJICC-02-2014-0005 [33] 王瑞, 肖冰松. 基于改进鸽群优化和马尔可夫链的多无人机协同搜索方法[J]. 工程科学学报, 2019, 41(10): 1342-1350.WANG R, XIAO B S. Cooperative search for multi-UAVs via an improved pigeon-inspired optimization and Markov chain approach[J]. Chinese Journal of Engineering, 2019, 41(10): 1342-1350(in Chinese). [34] 徐博, 张大龙. 基于量子行为鸽群优化的无人机紧密编队控制[J]. 航空学报, 2020, 41(8): 323722.XU B, ZHANG D L. Tight formation flight control of UAVs based on pigeon inspired algorithm optimization by quantum behavior[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(8): 323722(in Chinese). [35] FENG Q, HAI X S, SUN B, et al. Resilience optimization for multi-UAV formation reconfiguration via enhanced pigeon-inspired optimization[J]. Chinese Journal of Aeronautics, 2022, 35(1): 110-123. doi: 10.1016/j.cja.2020.10.029 [36] QIU H X, DUAN H B. A multi-objective pigeon-inspired optimization approach to UAV distributed flocking among obstacles[J]. Information Sciences, 2020, 509: 515-529. doi: 10.1016/j.ins.2018.06.061 [37] REN W. Trajectory tracking control for a miniature fixed-wing unmanned air vehicle[J]. International Journal of Systems Science, 2007, 38(4): 361-368. doi: 10.1080/00207720601170586 [38] 李霜琳, 何家皓, 敖海跃, 等. 基于鸽群优化算法的实时避障算法[J]. 北京航空航天大学学报, 2021, 47(2): 359-365.LI S L, HE J H, AO H Y, et al. Real-time obstacle avoidance algorithm based on pigeon-inspired optimization[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 359-365(in Chinese). [39] 姜龙亭, 魏瑞轩, 张启瑞, 等. 基于群智机理的集群防碰撞控制[J]. 航空学报, 2020, 41(S2): 724294.JIANG L T, WEI R X, ZHANG Q R, et al. Cluster anti-collision control based on swarm intelligence mechanism[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724294(in Chinese). [40] 符小卫, 张嘉平, 魏可. 基于联盟的无人机集群避障方法[J]. 无人系统技术, 2021, 4(3): 11-17.FU X W, ZHANG J P, WEI K. Obstacle avoidance method for UAV swarm based on alliance[J]. Unmanned Systems Technology, 2021, 4(3): 11-17(in Chinese). [41] 魏瑞轩, 倪天, 赵晓林, 等. 认知无人机-环境系统的防碰撞稳定性[J]. 控制理论与应用, 2019, 36(9): 1453-1460.WEI R X, NI T, ZHAO X L, et al. Collision avoidance stability of the cognitive unmanned aerial vehicle & environment system[J]. Control Theory & Applications, 2019, 36(9): 1453-1460(in Chinese). [42] 曹瑞, 刘燕斌, 沈海东, 等. 基于鸽群搜索策略的代理模型结构优化方法[J]. 中国科学(技术科学), 2020, 50(12): 1612-1624. doi: 10.1360/SST-2019-0277CAO R, LIU Y B, SHEN H D, et al. Optimization algorithm of the surrogate model structure based on pigeon swarm search strategy[J]. Scientia Sinica (Technologica), 2020, 50(12): 1612-1624(in Chinese). doi: 10.1360/SST-2019-0277 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 927
- HTML全文浏览量: 116
- PDF下载量: 17
- 被引次数: 0
