



Ship’s critical part detection algorithm based on anchor-free in optical remote sensing
-
摘要:
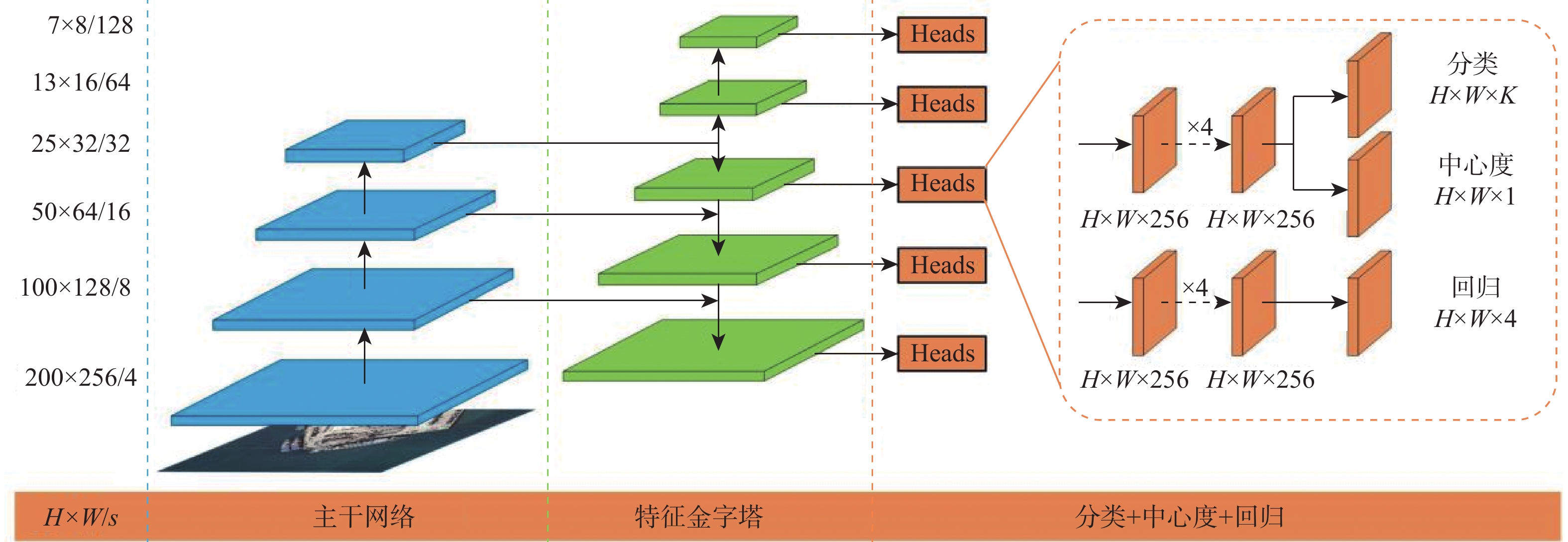
针对基于深度学习的遥感舰船检测算法存在精细化程度不足、检测效率低的问题,提出一种基于anchor-free的光学遥感舰船关重部位检测算法。所提算法以全卷积的单阶段目标检测(FCOS)算法为基准,在主干网络中引入全局上下文模块,提高网络的特征表达能力;为更好地描述目标的方向性,在预测阶段构建了具有方向表征能力的回归分支;对中心度函数进行优化,使其具备方向感知和自适应能力。实验结果表明:在自建舰船关重部位数据集和HRSC2016上,所提算法的平均精度(AP)比FCOS算法有显著提升;与其他算法相比,所提算法在检测速度和检测精度上均表现优越,具有较高的检测效率。
Abstract:Low detection effectiveness and inadequate refinement plague the existing deep learning-based remote sensing ship detection technique. To address the above problems, an optical remote sensing ship critical part detection algorithm based on anchor-free is proposed. The proposed algorithm takes fully convolutional one-stage object detection (FCOS) as the benchmark algorithm and introduces a global context module in the backbone network to improve the feature representation capability of the network. In the prediction step, a regression branch with orientation representation capabilities is built to more accurately describe the orientation of targets. The centrality function is optimized to make it direction-aware and adaptive. The experimental results show that the average precision (AP) of the proposed algorithm is significant improved over FCOS algorithm on the self-built ship critical part dataset and HRSC2016, respectively. Compared with other algorithms, the proposed algorithm has superior performance in both detection speed and detection accuracy and has high detection efficiency.
-
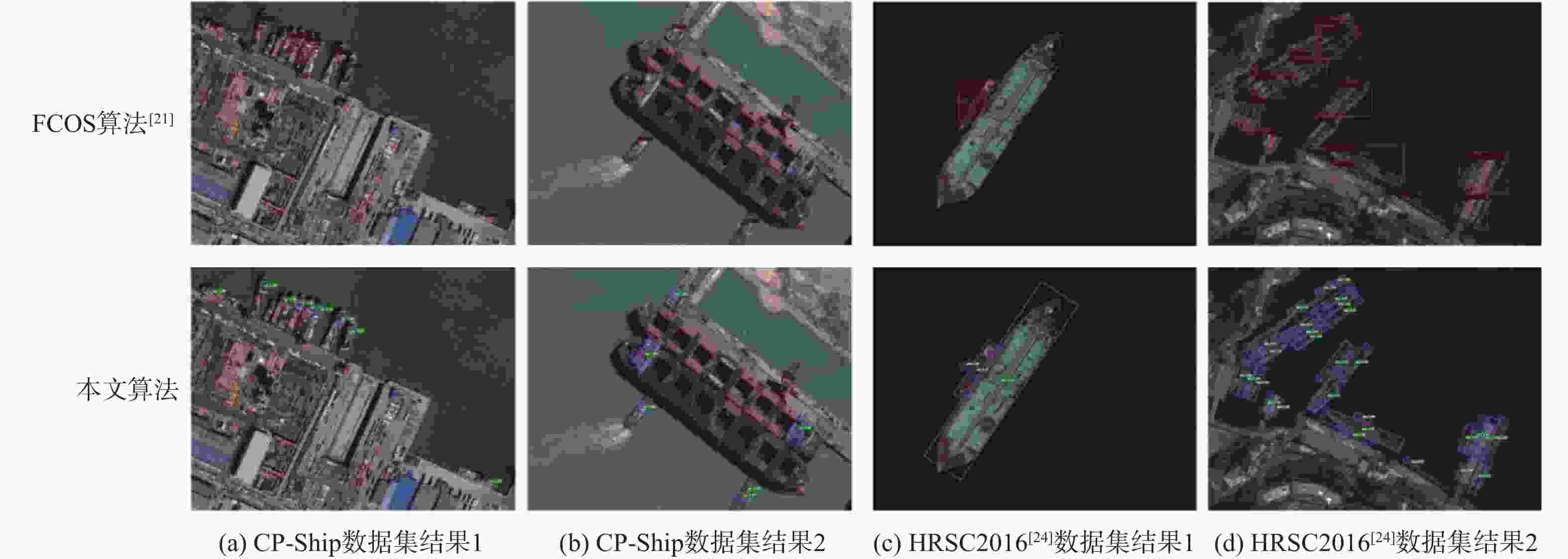
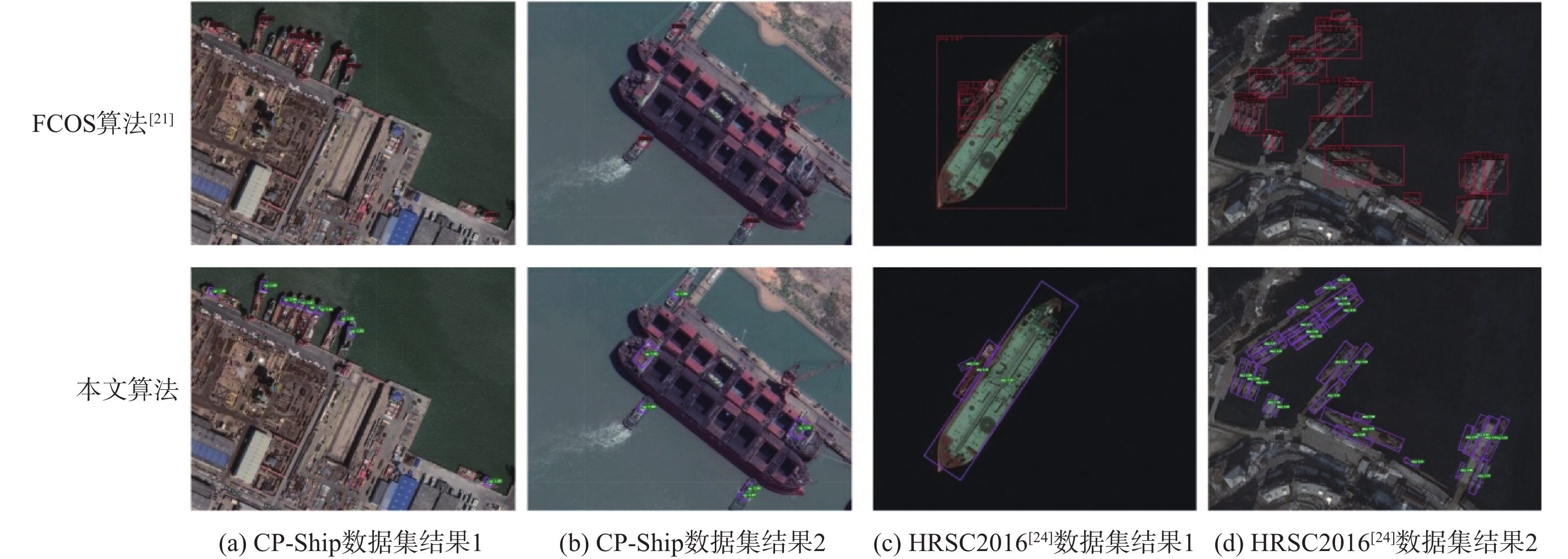
图 10 不同数据集上检测的可视化结果
Figure 10. Visualization of detection results on different datasets
数据集 图像数量 关重部位数量
(CP-Ship)舰船数量
(CP-Ship)CP-Ship HRSC2016[24] 训练集 812 849 2295 2342 测试集 203 212 561 634 总计 1015 1680 2856 2976  下载: 导出CSV
下载: 导出CSV
表 2 消融实验结果
Table 2. Experiment results of ablation
算法 嵌入GCB 改进回归分支 定向自适应中心度 AP/% 算法1 63.04 算法2 √ 64.96 算法3 √ 64.34 算法4 √ √ 66.51 算法5 √ √ √ 68.56
下载: 导出CSV
表 3 不同算法在CP-Ship测试集上的定量结果
Table 3. Quantitative results of different algorithms on the CP-Ship test set
算法 主干网络 图像大小/像素 锚框类型 TP FP AP/% FPS Paras/106 Faster R-CNN[7] ResNet-50 800×608 水平框 411 152 65.78 19.2 41.12 Rotated Faster R-CNN ResNet-50 800×608 旋转框 425 138 68.60 11.9 41.12 RetinaNet[11] ResNet-50 800×608 水平框 387 229 60.41 23.8 36.1 Rotated RetinaNet ResNet-50 800×608 旋转框 388 162 60.61 13.9 36.13 R3Det[18] ResNet-50 800×608 旋转框 393 146 64.28 11.3 41.58 CornerNet[18] Hourglass-104 511×511 无锚框 419 1274 59.73 3.0 200.95 CenterNet[19] ResNet-18 512×512 无锚框 392 136 63.23 68.7 14.21 YOLOX-L[20] CSPDarkNet 640×640 无锚框 441 189 72.71 27.8 54.15 VarifocalNet[29] ResNet-50 800×608 无锚框 400 262 62.98 20.3 32.48 BBAVectors[30] ResNet-50 800×608 无锚框 448 198 68.31 14.5 SASM[31] ResNet-50 800×608 无锚框 397 214 63.85 13.5 36.6 FCOS[21] ResNet-50 800×608 无锚框 384 101 63.04 24.1 31.84 本文算法 ResNet-50+GCB 800×608 无锚框 417 89 68.56 21.3 32.49
下载: 导出CSV
表 4 不同算法在HRSC2016[24]测试集上的定量结果
Table 4. Quantitative results of different algorithms on HRSC2016[24] test set
算法 主干网络 图像大小 锚框类型 TP FP AP/% FPS Faster R-CNN[7] ResNet-50 800×608 水平框 557 93 84.33 20.6 Rotated Faster R-CNN ResNet-50 800×608 旋转框 558 199 81.82 16.4 RetinaNet[11] ResNet-50 800×608 水平框 543 151 81.11 22.7 Rotated RetinaNet ResNet-50 800×608 旋转框 467 66 68.10 21.2 R3Det[18] ResNet-50 800×608 旋转框 535 118 82.80 16.0 CornerNet[18] Hourglass-104 511×511 无锚框 521 2128 60.71 1.9 CenterNet[19] ResNet-18 512×512 无锚框 541 328 75.25 46.6 YOLOX-L[20] CSPDarkNet 640×640 无锚框 567 142 87.09 27.8 VarifocalNet[29] ResNet-50 800×608 无锚框 558 144 85.04 20.8 BBAVectors[30] ResNet-50 800×608 无锚框 561 219 86.19 15.8 SASM[31] ResNet-50 800×608 无锚框 540 431 80.40 20.0 FCOS[21] ResNet-50 800×608 无锚框 510 76 78.06 25.7 本文算法 ResNet-50+GCB 800×608 无锚框 558 52 84.73 22.5
下载: 导出CSV
-
[1] KANJIR U, GREIDANUS H, OŠTIR K. Vessel detection and classification from spaceborne optical images: A literature survey[J]. Remote Sensing of Environment, 2018, 207: 1-26. doi: 10.1016/j.rse.2017.12.033 [2] 刘俊琦, 李智, 张学阳. 可见光遥感图像海面目标检测技术综述[J]. 计算机科学, 2020, 47(3): 116-123.LIU J Q, LI Z, ZHANG X Y. Review of maritime target detection in visible bands of optical remote sensing images[J]. Computer Science, 2020, 47(3): 116-123 (in Chinese). [3] 李晓斌, 江碧涛, 杨渊博, 等. 光学遥感图像目标检测技术综述[J]. 航天返回与遥感, 2019, 40(4): 95-104. doi: 10.3969/j.issn.1009-8518.2019.04.011LI X B, JIANG B T, YANG Y B, et al. A survey on object technology in optical remote sensing images[J]. Spacecraft recovery & Remote Sensing, 2019, 40(4): 95-104 (in Chinese). doi: 10.3969/j.issn.1009-8518.2019.04.011 [4] 张财广, 熊博莅, 匡纲要. 光学卫星遥感图像舰船目标检测综述[J]. 电波科学学报, 2020, 35(5): 637-647.ZHANG C G, XIONG B L, KUANG G Y. A survey of ship detection in optical satellite remote sensing images[J]. Chinese Journal of Radio Science, 2020, 35(5): 637-647 (in Chinese). [5] 张永胜, 计一飞, 董臻. 时-空变化的背景电离层对星载合成孔径雷达方位向成像的影响分析[J]. 电子与信息学报, 2021, 43(10): 2781-2789.ZHANG Y S, JI Y F, DONG Z. Research on background ionospheric impacts imposed by spatio-temporal variations on spaceborne synthetic aperture radar azimuth imaging[J]. Journal of Electronics & Information Technology, 2021, 43(10): 2781-2789 (in Chinese). [6] GIRSHICK R. Fast R-CNN[C]//Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2015: 1440-1448. [7] REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. doi: 10.1109/TPAMI.2016.2577031 [8] HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]//Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2017: 2980-2988. [9] LIU W, ANGUELOV D, ERHAN D, et al. SSD: Single shot MultiBox detector[C]//Proceedings of the European Conference on Computer Vision. Berlin: Springer, 2016: 21-37. [10] REDMON J, FARHADI A. YOLO9000: Better, faster, stronger[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 6517-6525. [11] LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]//Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2017: 2999-3007. [12] 史文旭, 江金洪, 鲍胜利. 基于特征融合的遥感图像舰船目标检测算法[J]. 光子学报, 2020, 49(7): 57-67.SHI W X, JIANG J H, BAO S L. Ship detection method in remote sensing image based on feature fusion[J]. Acta Photonica Sinica, 2020, 49(7): 57-67 (in Chinese). [13] 吴止锾, 李磊, 高永明. 遥感图像舰船检测的旋转卷积集成YOLOv3模型[J]. 计算机工程与应用, 2019, 55(22): 146-151.WU Z H, LI L, GAO Y M. Rotation convolution ensemble YOLOv3 model for ship detection in remote sensing images[J]. Computer Engineering and Applications, 2019, 55(22): 146-151 (in Chinese). [14] YANG X, YAN J C, FENG Z M, et al. R3Det: Refined single-stage detector with feature refinement for rotating object[EB/OL]. (2020-12-08) [2020-12-10]. http://arxiv.org/abs/1908.05612.pdf. [15] 赵微, 惠斌, 张玉晓. 红外舰船目标的要害点检测算法[J]. 红外与激光工程, 2014, 43(1): 48-52.ZHAO W, HUI B, ZHANG Y X. Detection algorithms of aim points of IR warship images[J]. Infrared and Laser Engineering, 2014, 43(1): 48-52 (in Chinese). [16] 李晨瑄, 顾佼佼, 王磊, 等. 多尺度特征融合的Anchor-Free轻量化舰船要害部位检测算法[J]. 北京航空航天大学学报, 2022, 48(10): 2006-2019.LI C X, GU J J, WANG L, et al. Warship’s vital parts detection algorithm based on lightweight anchor-free network with multi-scale feature fusion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 2006-2019 (in Chinese). [17] 张长伦, 张翠文, 王恒友, 等. 基于注意力机制的NMS在目标检测中的研究[J]. 电子测量技术, 2021, 44(19): 82-88.ZHANG C L, ZHANG C W, WANG H Y, et al. Research on non-maximum suppression based on attention mechanism in object detection[J]. Electronic Measurement Technology, 2021, 44(19): 82-88 (in Chinese). [18] LAW H, DENG J. CornerNet: Detecting objects as paired keypoints[C]//Proceedings of the European Conference on Computer Vision. Berlin: Springer, 2018: 765-781. [19] DUAN K W, BAI S, XIE L X, et al. CenterNet: Keypoint triplets for object detection[C]//Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2020: 6568-6577. [20] GE Z, LIU S T, WANG F, et al. YOLOX: Exceeding YOLO series in 2021[EB/OL]. (2021-08-06) [2021-08-10]. http://arxiv.org/abs/2107.08430.pdf. [21] TIAN Z, SHEN C H, CHEN H, et al. FCOS: A simple and strong anchor-free object detector[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(4): 1922-1933. [22] CAO Y, XU J R, LIN S, et al. GCNet: Non-local networks meet squeeze-excitation networks and beyond[C]//Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop. Piscataway: IEEE Press, 2020: 1971-1980. [23] LANG S, VENTOLA F, KERSTING K. DAFNe: A one-stage anchor-free approach for oriented object detection[EB/OL]. (2022-05-30) [2022-06-02]. http://arxiv.org/abs/2109.06148.pdf. [24] LIU Z K, YUAN L, WENG L B, et al. A high resolution optical satellite image dataset for ship recognition and some new baselines[C]//Proceedings of the 6th International Conference on Pattern Recognition Applications and Methods. Porto: Science and Technology Publications, 2017. [25] MA Y, CHAI L, JIN L Z, et al. AVS-YOLO: Object detection in aerial visual scene[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2022, 36(1): 2250004. doi: 10.1142/S0218001422500045 [26] GAO X, RAM S, PHILIP R C, et al. Selecting post-processing schemes for accurate detection of small objects in low-resolution wide-area aerial imagery[J]. Remote Sensing, 2022, 14(2): 255. doi: 10.3390/rs14020255 [27] LI K, WAN G, CHENG G, et al. Object detection in optical remote sensing images: A survey and a new benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 159: 296-307. doi: 10.1016/j.isprsjprs.2019.11.023 [28] XIA G S, BAI X, DING J, et al. DOTA: A large-scale dataset for object detection in aerial images[C]//Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 3974-3983. [29] ZHANG H Y, WANG Y, DAYOUB F, et al. VarifocalNet: An IoU-aware dense object detector[C]//Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2021: 8510-8519. [30] YI J R, WU P X, LIU B, et al. Oriented object detection in aerial images with box boundary-aware vectors[C]//Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press, 2021: 2149-2158. [31] HOU L P, LU K, XUE J A, et al. Shape-adaptive selection and measurement for oriented object detection[C]//Proceedings of the AAAI Conference on Artificial Intelligence. Washton D. C.: AAAI, 2022, 36(1): 923-932. [32] YANG Y, PAN Z X, HU Y X, et al. CPS-det: An anchor-free based rotation detector for ship detection[J]. Remote Sensing, 2021, 13(11): 2208. doi: 10.3390/rs13112208 [33] ZHANG X R, WANG G C, ZHU P, et al. GRS-det: An anchor-free rotation ship detector based on gaussian-mask in remote sensing images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(4): 3518-3531. doi: 10.1109/TGRS.2020.3018106 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 183
- HTML全文浏览量: 113
- PDF下载量: 14
- 被引次数: 0
