



-
摘要:
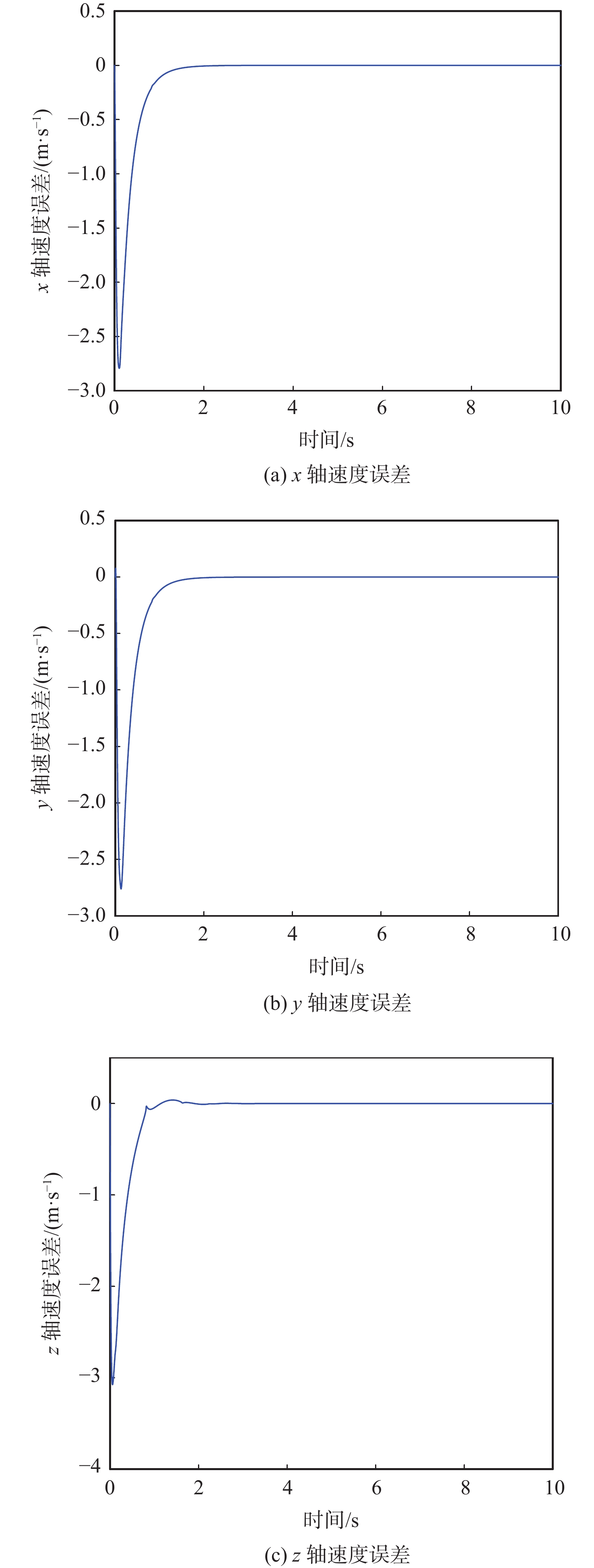
针对四旋翼位置环和姿态环的控制问题,使得四旋翼位姿能够在预定时间内稳定,提出一种基于预定义时间滑模控制算法的位姿控制器。该控制器通过对四旋翼位置环和姿态环2个环节的控制,使得四旋翼的位姿能够在预定时间内稳定。理论推导及数值仿真表明:所提算法具有正确性;仿真结果表明:应用所提控制器的四旋翼的位置和姿态能够在预定时间内达到稳定。
Abstract:To address the control problem of the position loop and attitude loop of the quadrotor, so that the position and attitude of the quadrotor can be stable in the predetermined time, a position and attitude controller based on the predefined time sliding mode control algorithm is proposed. By controlling the position loop and attitude loop of the four rotors, the position and attitude of the quadrotor can be stabilized within a predetermined time. The proposed algorithm is proved by theoretical derivation and numerical simulation. The simulation results show that the position and attitude of the quadrotor with the proposed controller can achieve stability in the predetermined time.
-
Key words:
- quadrotor /
- predefined-time stability /
- sliding mode control /
- position control /
- attitude control
-

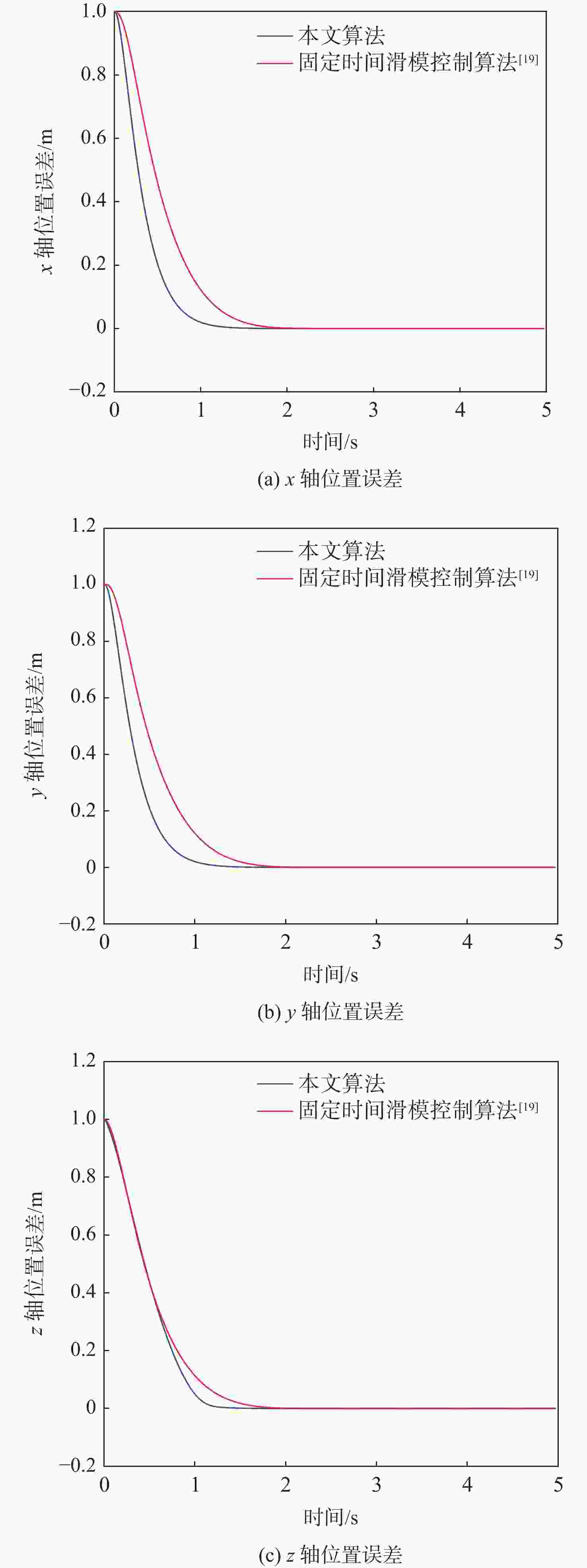
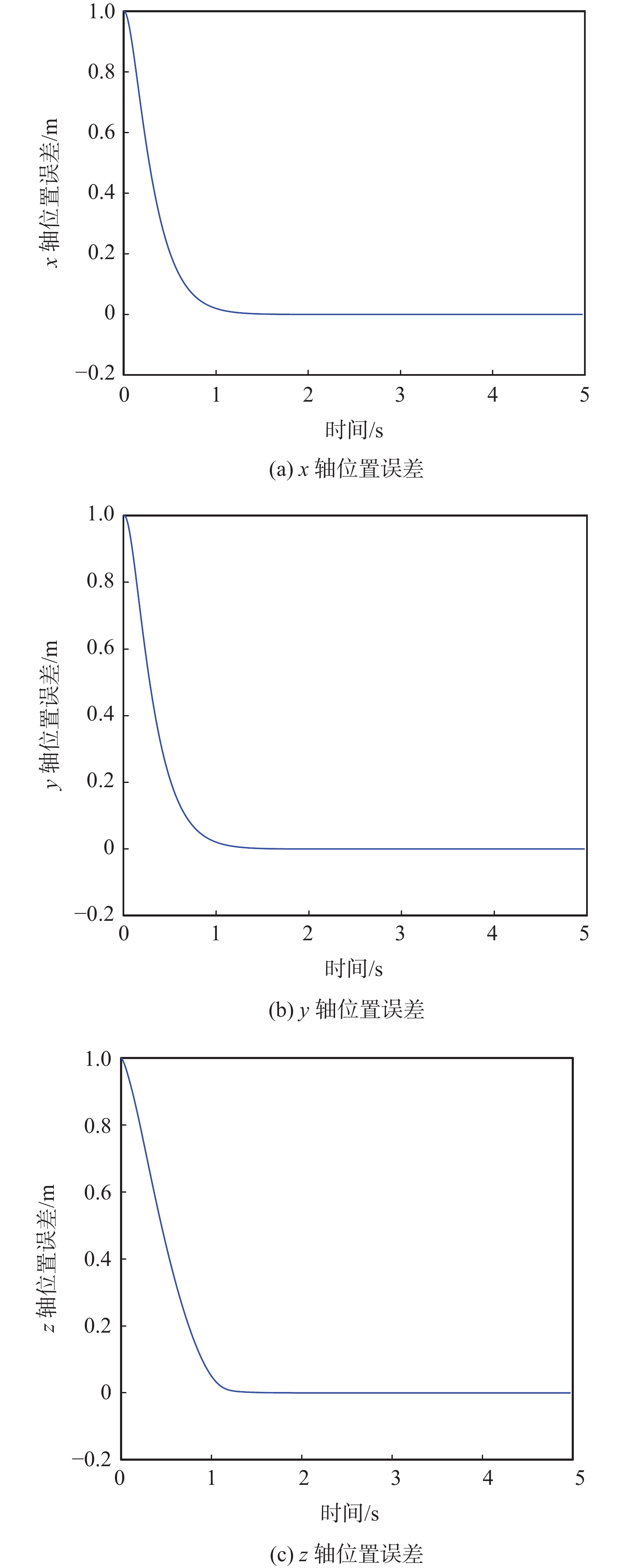
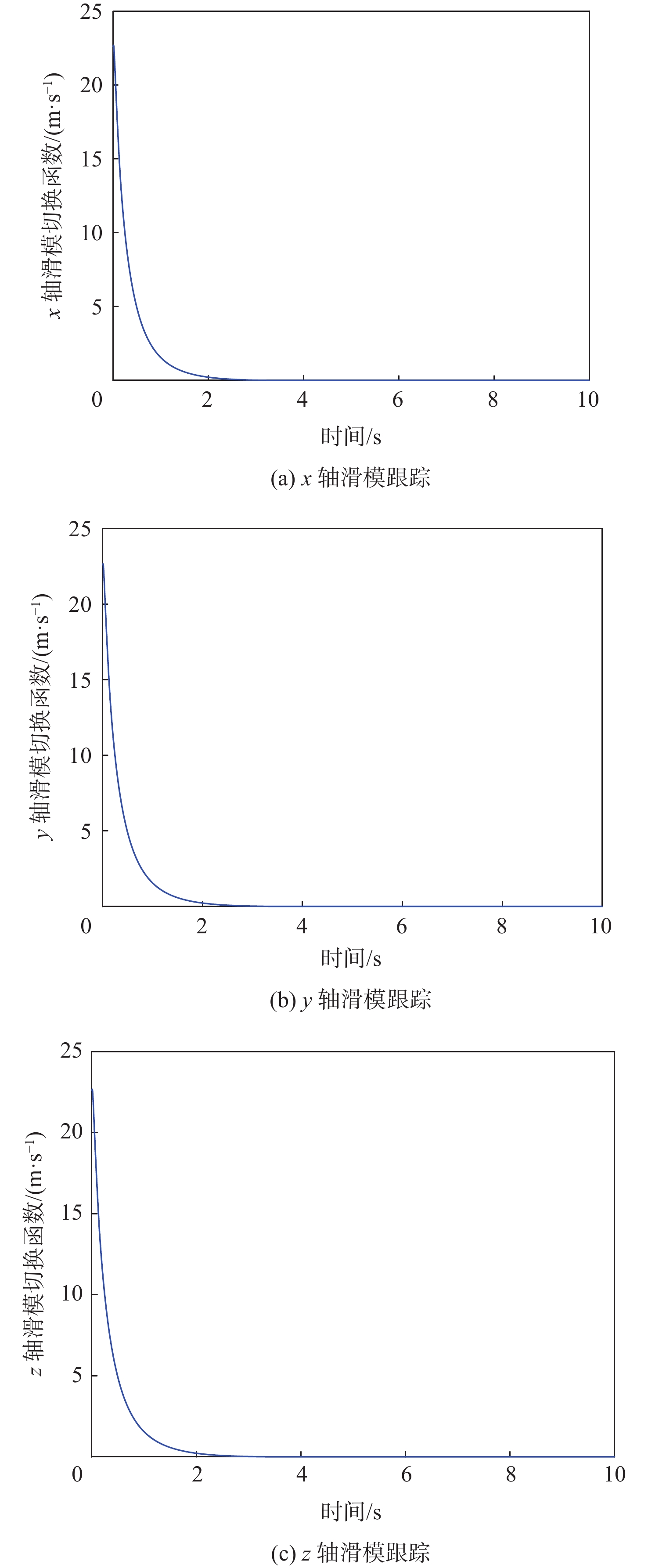
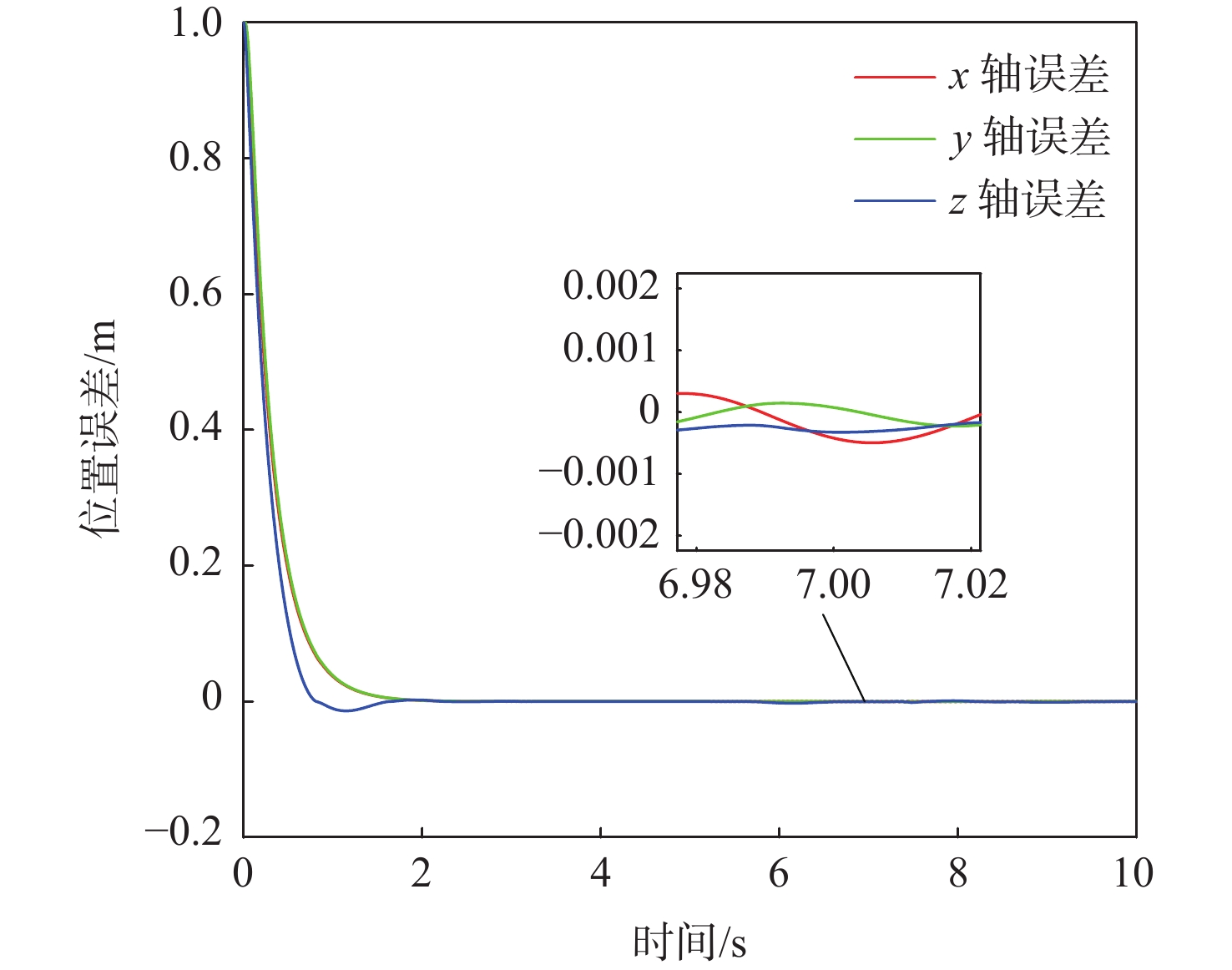
图 5 基于本文算法的位置环滑模跟踪
Figure 5. Position loop sliding mode tracking based on the proposed algorithm
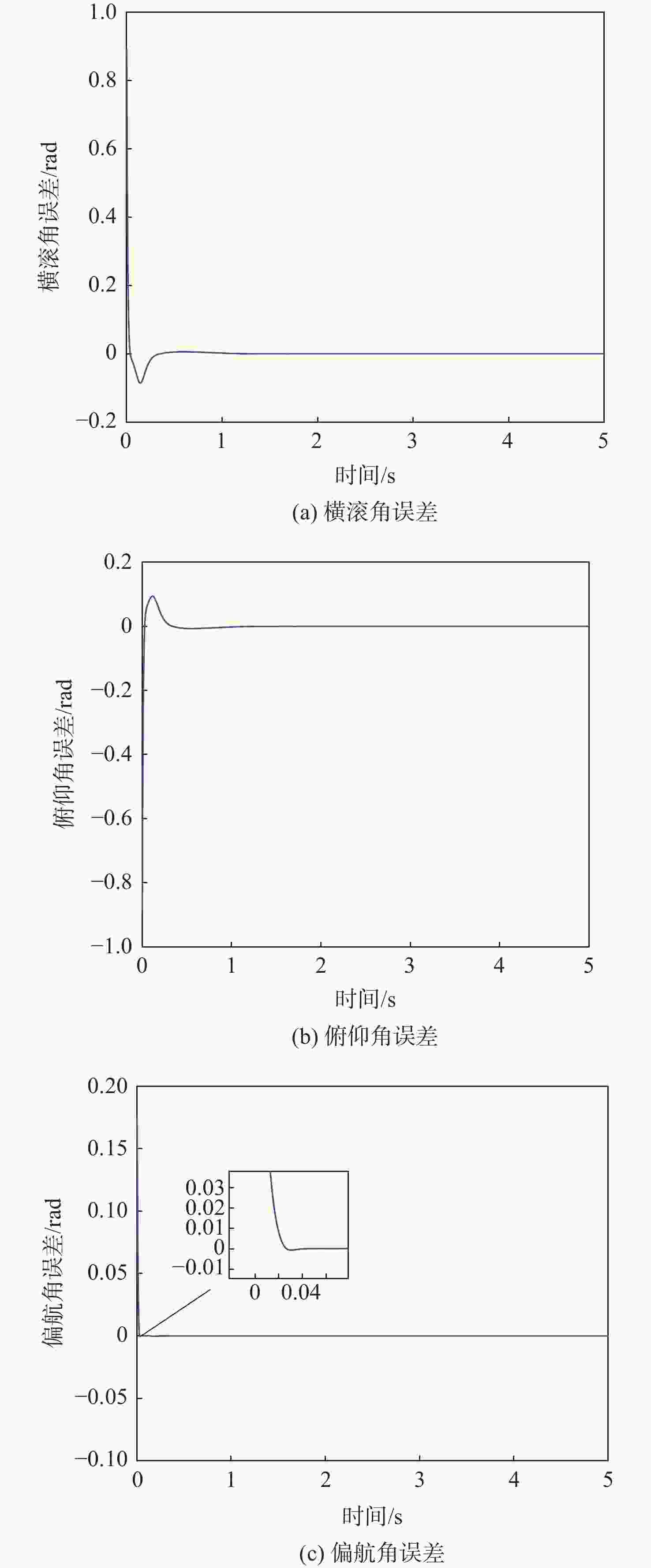
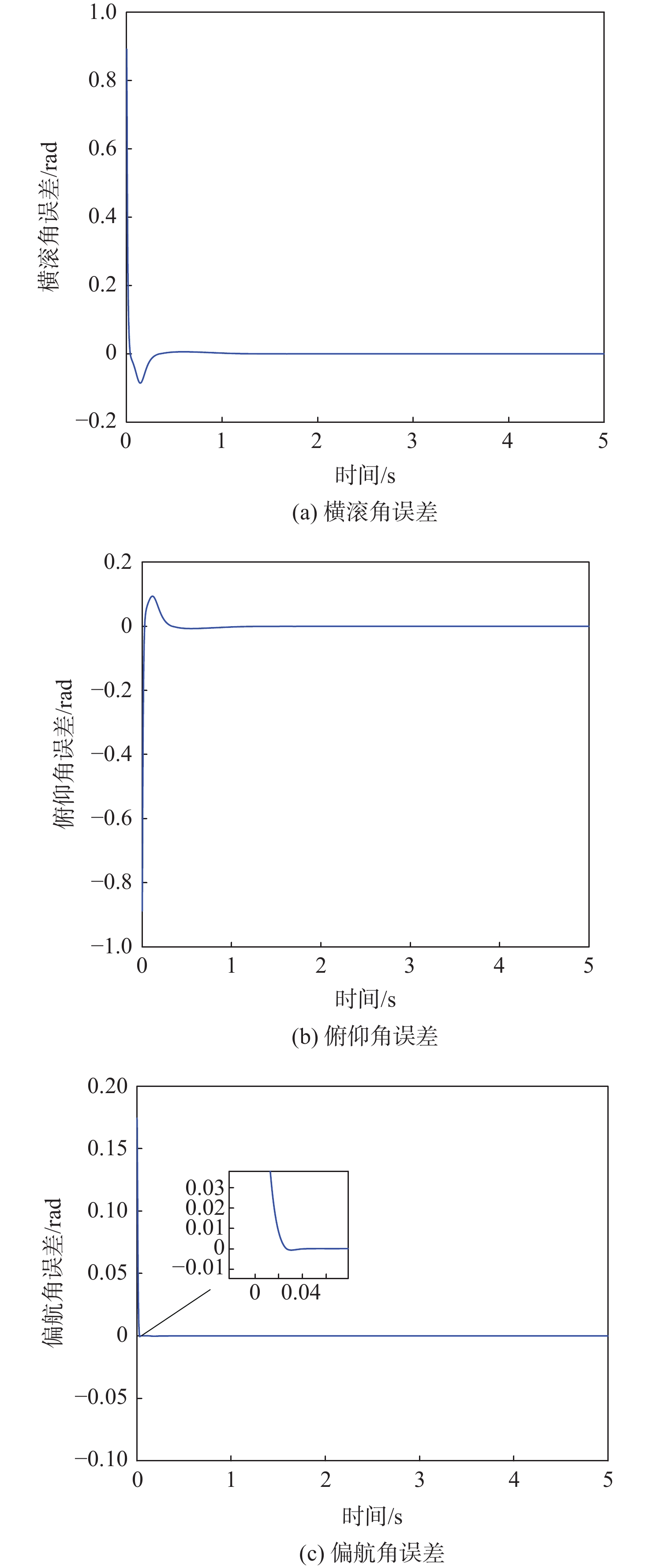
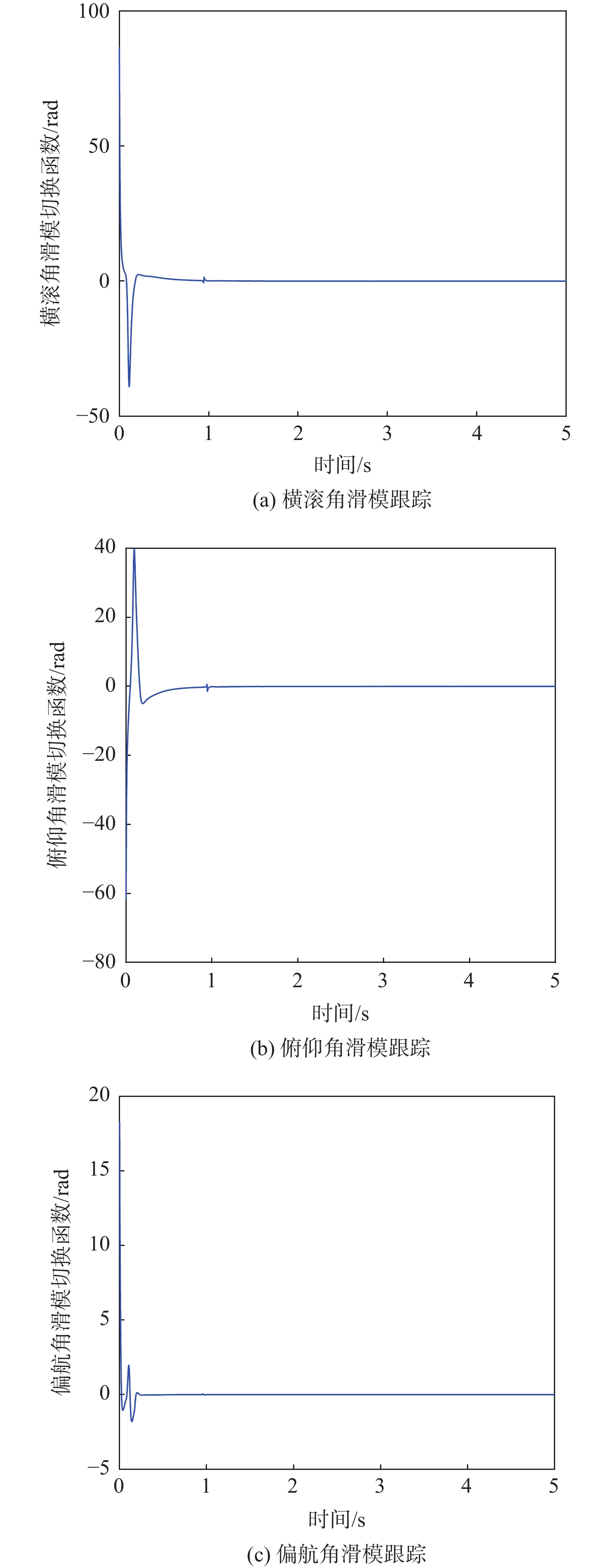
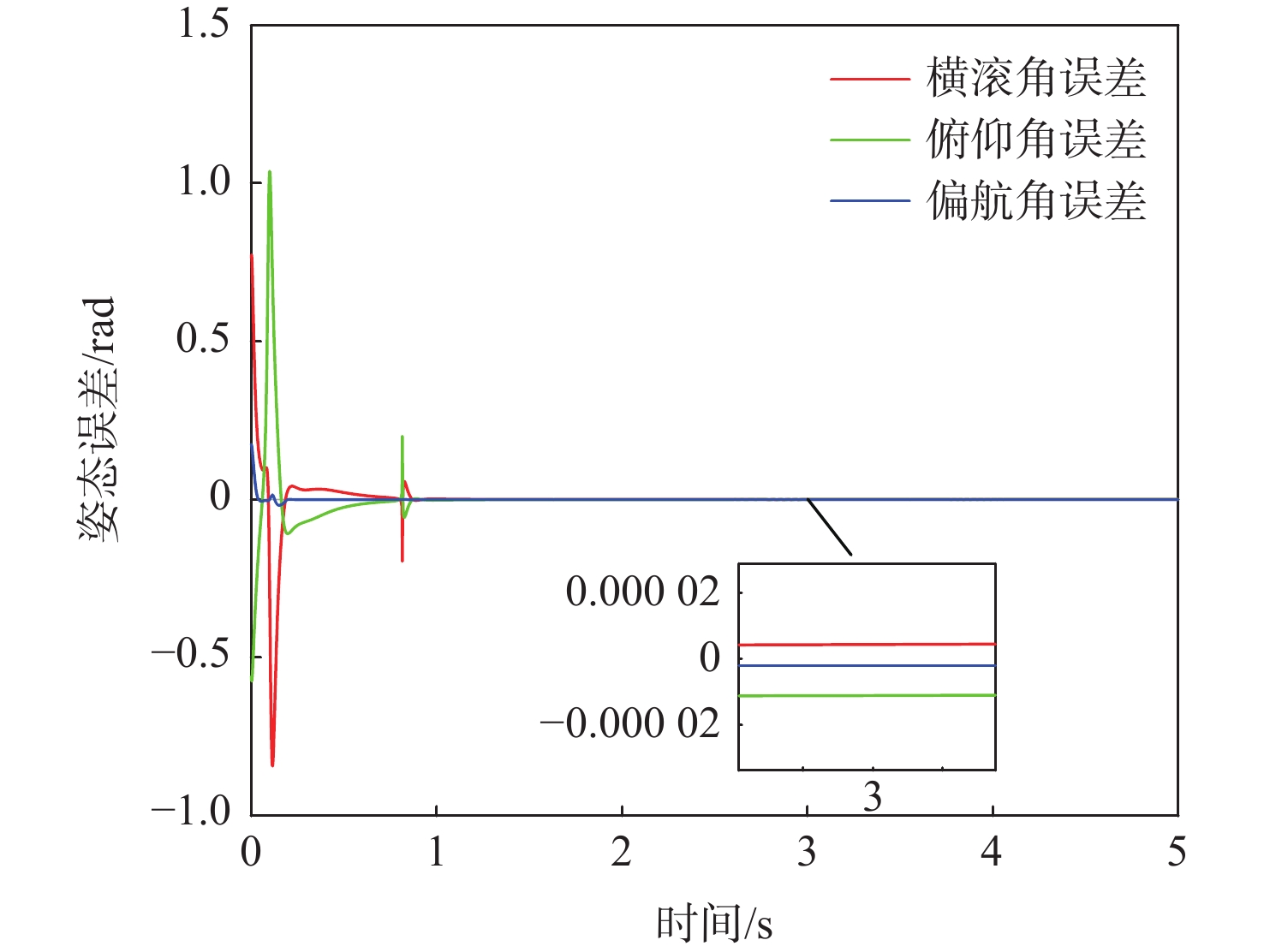
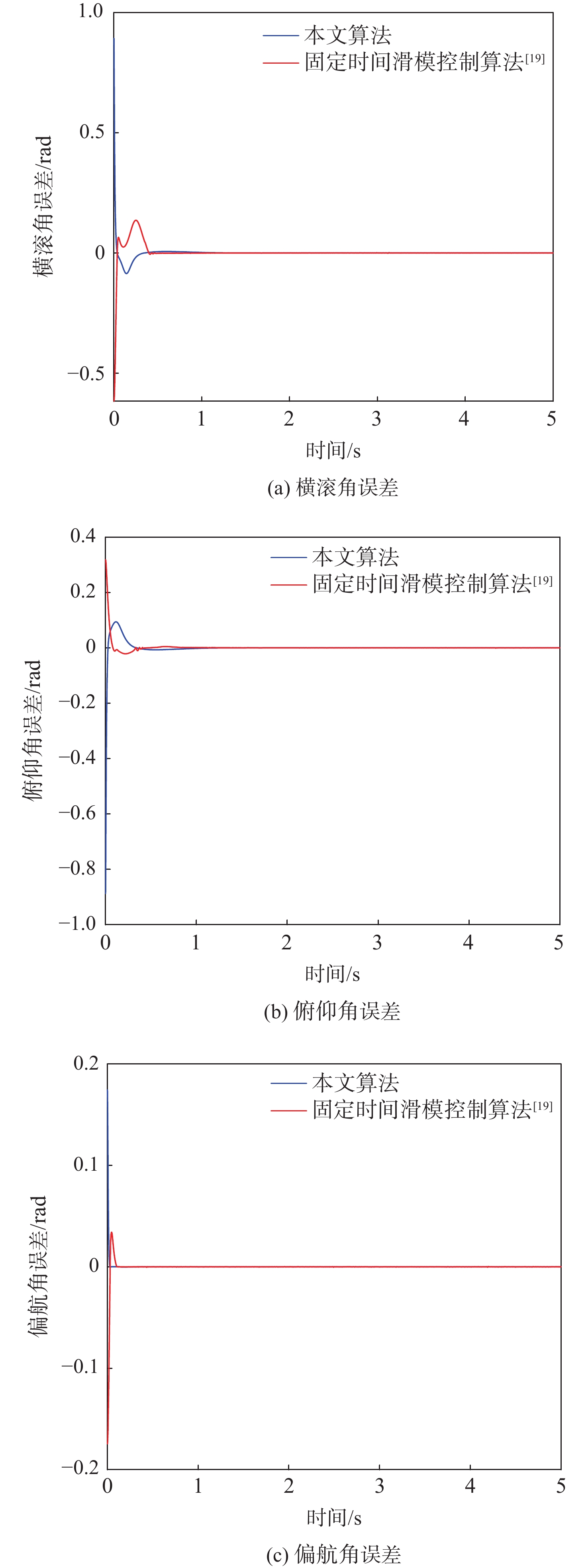
图 6 基于本文算法的姿态误差
Figure 6. Attitude errors of quadrotor based on the proposed algorithm
-
[1] ZHU X, ZHANG X X, YAN M D, et al. Three-dimensional formation keeping of multi-UAV based on consensus[J]. Journal of Central South University, 2017, 24(6): 1387-1395. [2] WANG B, HOU Z X, LU Y F, et al. Hover performance estimation and validation of battery powered vertical takeoff and landing aircraft[J]. Journal of Central South University, 2016, 23(10): 2595-2603. doi: 10.1007/s11771-016-3321-8 [3] SONG Y L, XIAN B, ZHANG Y, et al. Towards autonomous control of quadrotor unmanned aerial vehicles in a GPS-denied urban area via laser ranger finder[J]. Optik, 2015, 126(23): 3877-3882. doi: 10.1016/j.ijleo.2015.07.058 [4] PÉREZ-ALCOCER R, MORENO-VALENZUELA J, MIRANDA-COLORADO R. A robust approach for trajectory tracking control of a quadrotor with experimental validation[J]. ISA Transactions, 2016, 65: 262-274. doi: 10.1016/j.isatra.2016.08.001 [5] SHANG W, JING G H, ZHANG D D, et al. Adaptive fixed time nonsingular terminal sliding-mode control for quadrotor formation with obstacle and inter-quadrotor avoidance[J]. IEEE Access, 2021, 9: 60640-60657. doi: 10.1109/ACCESS.2021.3074316 [6] PAN H H, SUN W C. Nonlinear output feedback finite-time control for vehicle active suspension systems[J]. IEEE Transactions on Industrial Informatics, 2019, 15(4): 2073-2082. doi: 10.1109/TII.2018.2866518 [7] LIU H, MA T, LEWIS F L, et al. Robust formation control for multiple quadrotors with nonlinearities and disturbances[J]. IEEE Transactions on Cybernetics, 2020, 50(4): 1362-1371. doi: 10.1109/TCYB.2018.2875559 [8] MA Z Q, LIU Z X, HUANG P F, et al. Adaptive fractional-order sliding mode control for admittance-based telerobotic system with optimized order and force estimation[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 5165-5174. doi: 10.1109/TIE.2021.3078385 [9] SADALA S, PATRE B, GINOYA D. A new continuous integral sliding mode control algorithm for inverted pendulum and 2-DOF helicopter nonlinear systems: Theory and experiment[J]. Journal of Systems and Control Engineering, 2022, 236(3): 518-530. [10] LI H W, MAGHAREH A, WILFREDO CONDORI URIBE J, et al. An adaptive sliding mode control system and its application to real-time hybrid simulation[J]. Structural Control and Health Monitoring, 2022, 29(1): e2851. [11] 王宁, 王永, 余明裕. 四旋翼飞行器自适应动态面轨迹跟踪控制[J]. 控制理论与应用, 2017, 34(9): 1185-1194. doi: 10.7641/CTA.2017.60867WANG N, WANG Y, YU M Y. Adaptive dynamic surface trajectory tracking control of a quadrotor unmanned aerial vehicle[J]. Control Theory & Applications, 2017, 34(9): 1185-1194 (in Chinese). doi: 10.7641/CTA.2017.60867 [12] 杨伟, 崔国增, 李泽, 等. 四旋翼飞行器有限时间命令滤波反步控制[J]. 控制工程, 2022, 29(9): 1557-1565.YANG W, CUI G Z, LI Z, et al. Finite-time command filtered backstepping control for a quadrotor UAV[J]. Control Engineering of China, 2022, 29(9): 1557-1565 (in Chinese). [13] XU B. Composite learning finite-time control with application to quadrotors[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(10): 1806-1815. [14] MURALIDHARAN V, EKBOTE A K, MAHINDRAKAR A D. Finite-time control of a quadrotor system[J]. IFAC Proceedings Volumes, 2014, 47(1): 643-647. doi: 10.3182/20140313-3-IN-3024.00008 [15] WANG N, DENG Q, XIE G M, et al. Hybrid finite-time trajectory tracking control of a quadrotor[J]. ISA Transactions, 2019, 90: 278-286. [16] SHAO X L, TIAN B, YANG W. Fixed-time trajectory following for quadrotors via output feedback[J]. ISA Transactions, 2021, 110: 213-224. doi: 10.1016/j.isatra.2020.10.039 [17] MA D L, XIA Y Q, SHEN G H, et al. Practical fixed-time disturbance rejection control for quadrotor attitude tracking[J]. IEEE Transactions on Industrial Electronics, 2021, 68(8): 7274-7283. doi: 10.1109/TIE.2020.3001800 [18] WU C H, YAN J G, SHEN J H, et al. Predefined-time attitude stabilization of receiver aircraft in aerial refueling[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2021, 68(10): 3321-3325. [19] WANG J, MA X, ZHANG G W, et al. Fixed-time terminal sliding mode control for quadrotor aircraft[C]//Proceedings of the 11th International Conference on Modelling, Identification and Control. Berlin: Springer, 2020: 413-421. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 875
- HTML全文浏览量: 110
- PDF下载量: 15
- 被引次数: 0
