



-
摘要:
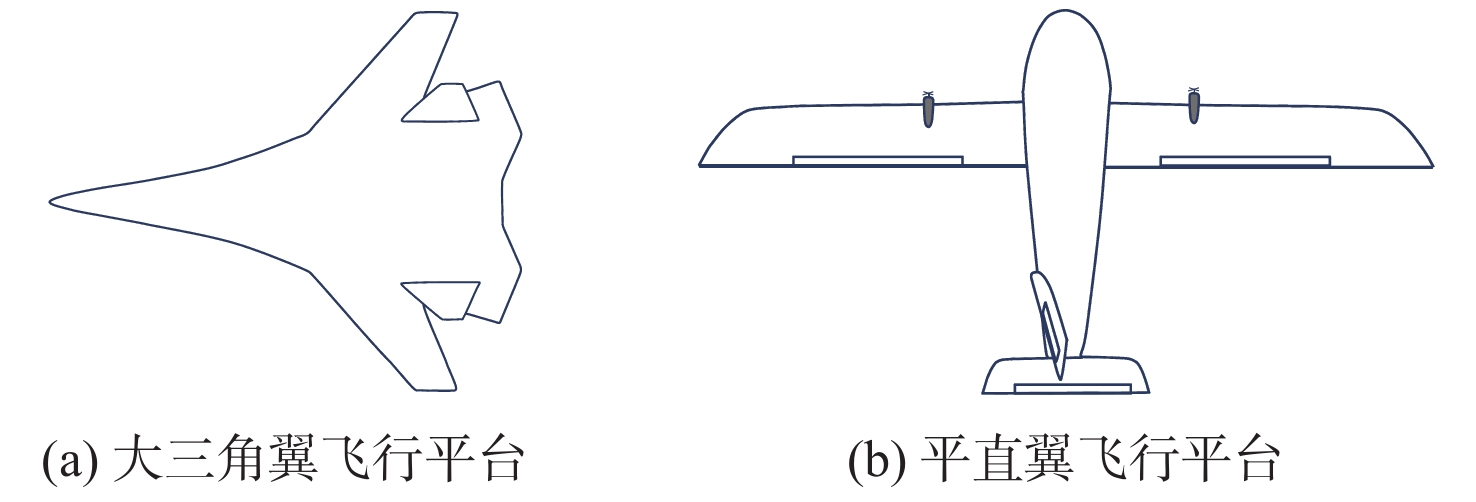
针对多平台、多任务的无人机飞行控制律的快速开发问题,提出一种基于自抗扰方法的无人机控制律架构,设计了可复用的扩展状态观测器及微分跟踪器,研究对比了其在3种具有较大差异的无人机平台中的应用,使7000 kg的超音速UAV_A获得了更优的敏捷性结果,在60 kg的缩比UAV_B完成了5.8
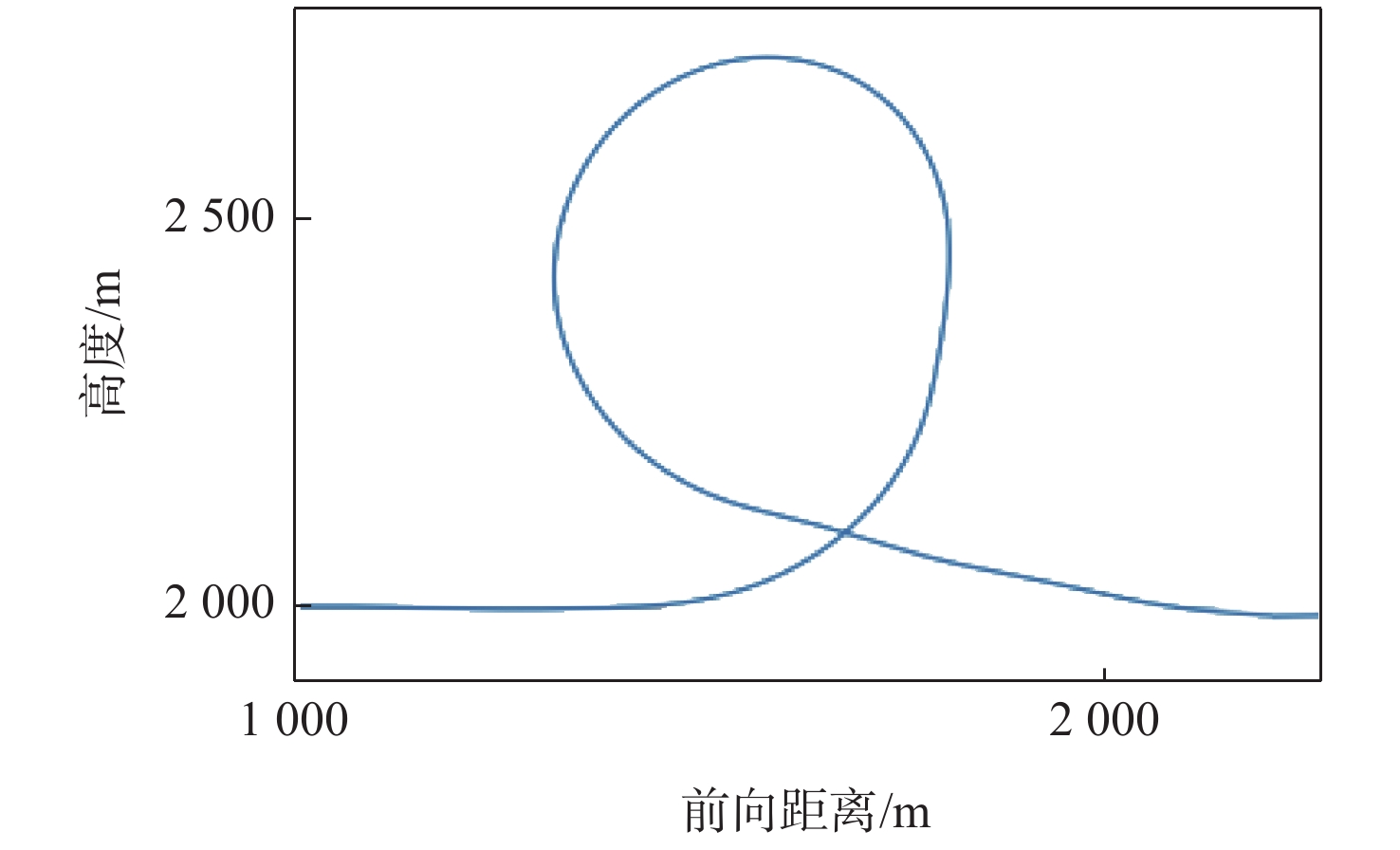
g 的半滚倒转大过载机动飞行试验,基于10 kg的平直翼UAV_C实现了12架机紧编队的精确轨迹控制飞行试验。仿真及试飞结果表明:所提自抗扰控制结构响应快速、控制精度高、鲁棒性强,能够较好地适应多类无人机、面向多种任务场景的控制需求,且不需调参就能够获得较好的控制效果,为飞行控制算法设计提供了新的技术途径。Abstract:To provided a fast solution to multi-UAV and multi-task flight control law design, this paper presents a control law structure based on the active-disturbance rejection control method, and designs a reusable extended state observer and tracking differentiator. Meanwhile, the application of this method to three different UAV platforms is introduced. Then, the agility evaluation tests, the maneuver flight tests and the multi-UAV formation flight tests were carried out respectively. As a result, the 7000 kg supersonic UAV_A obtained better agility than the target plane; the 60 kg UAV_B successfully completed the 5.8
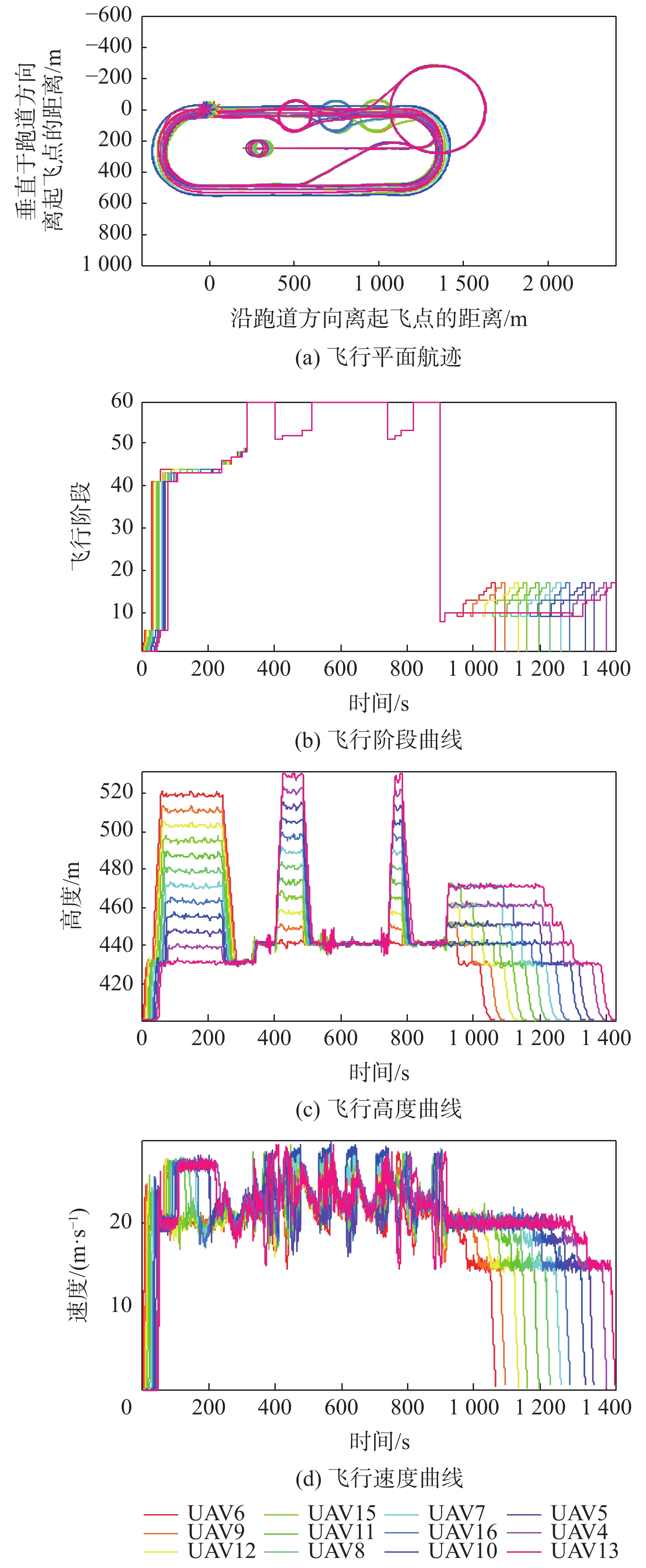
g half-roll reverse maneuver flight test; the 10 kg UAV_C realized the precise trajectory control with 15 meters spacing interval of 12 UAVs formation flight test. The results show that the ADRC control structure has the advantages of fast response, high control accuracy and strong robustness. It can effectively adapt to multi-type UAVs and multiple mission scenarios, and achieve better control effects without the need for gain schedule, thus, providing a new technical approach for flight control design. -
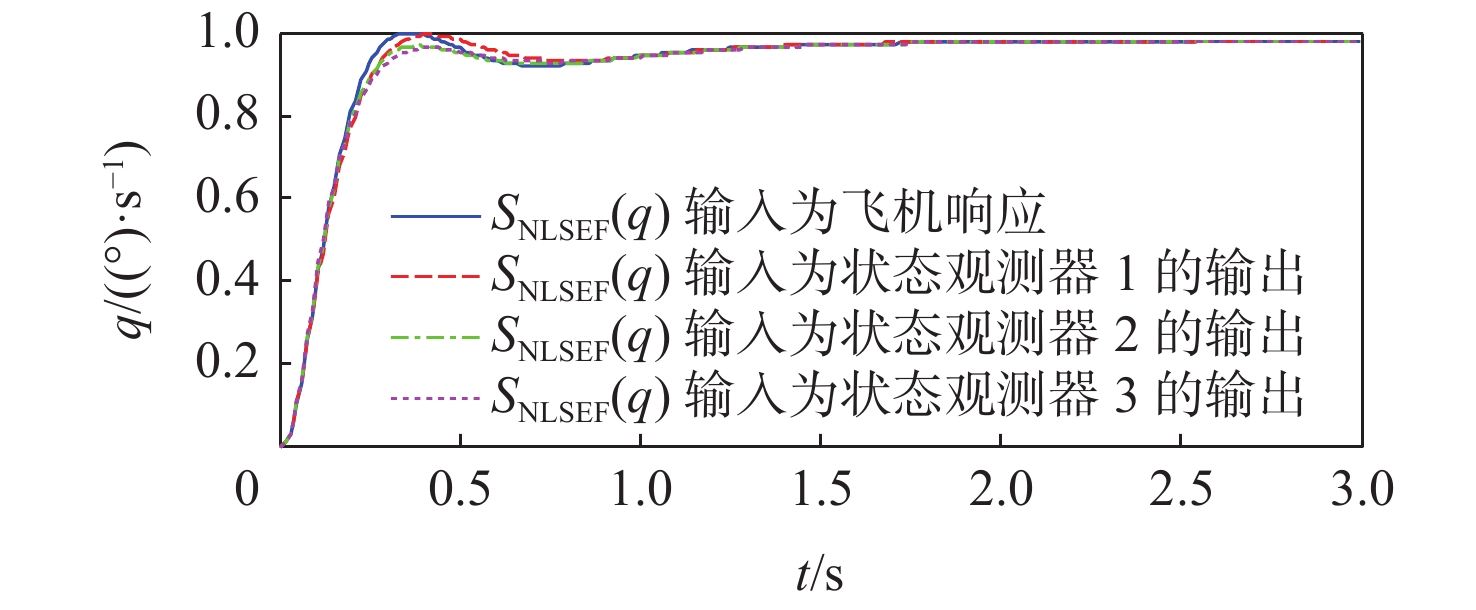
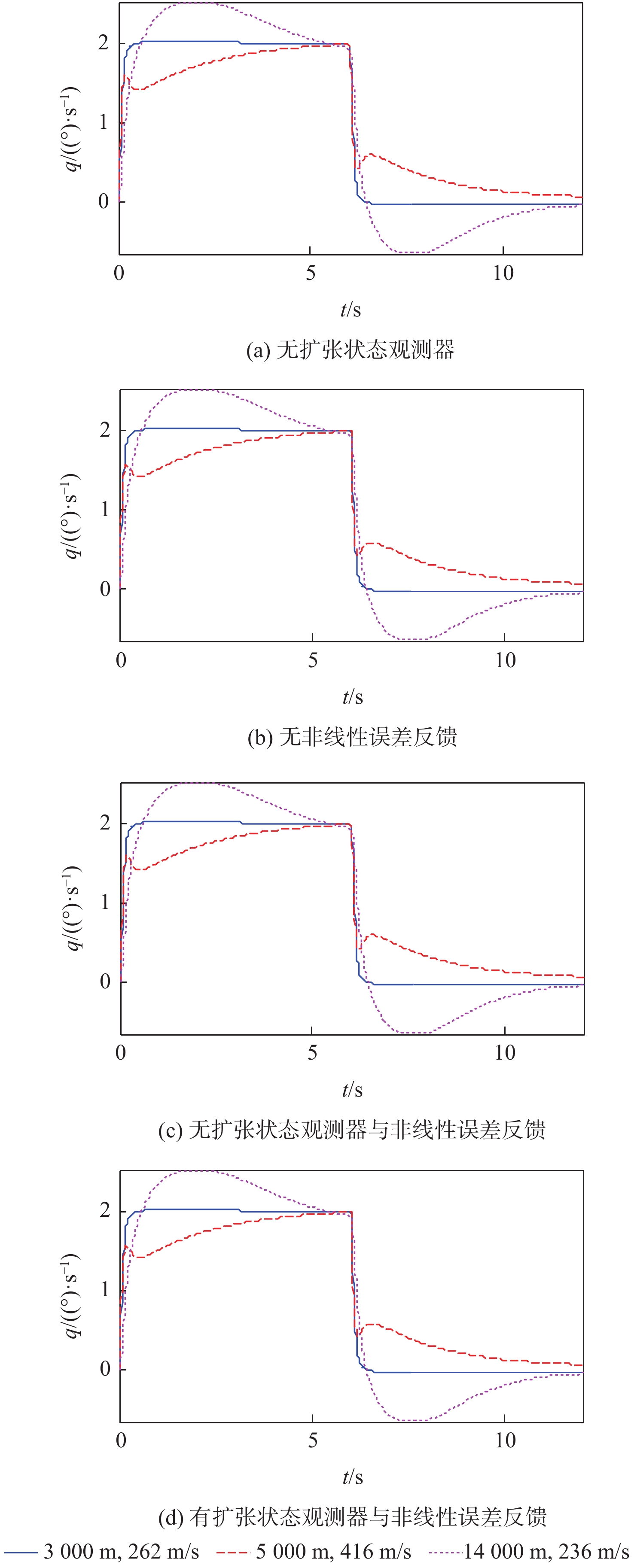
图 9 4种反馈输入下俯仰角速率响应(38 m/s)
Figure 9. Pitch-rate responses under 4 different feedback inputs (38 m/s)

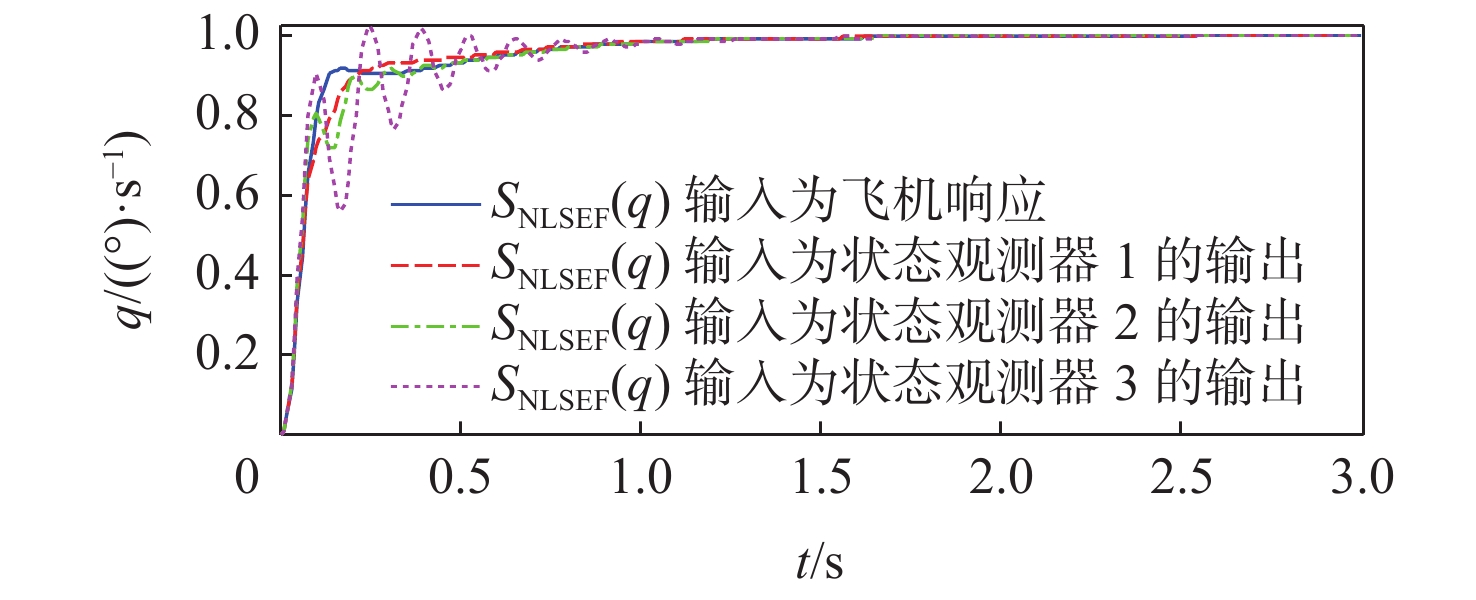
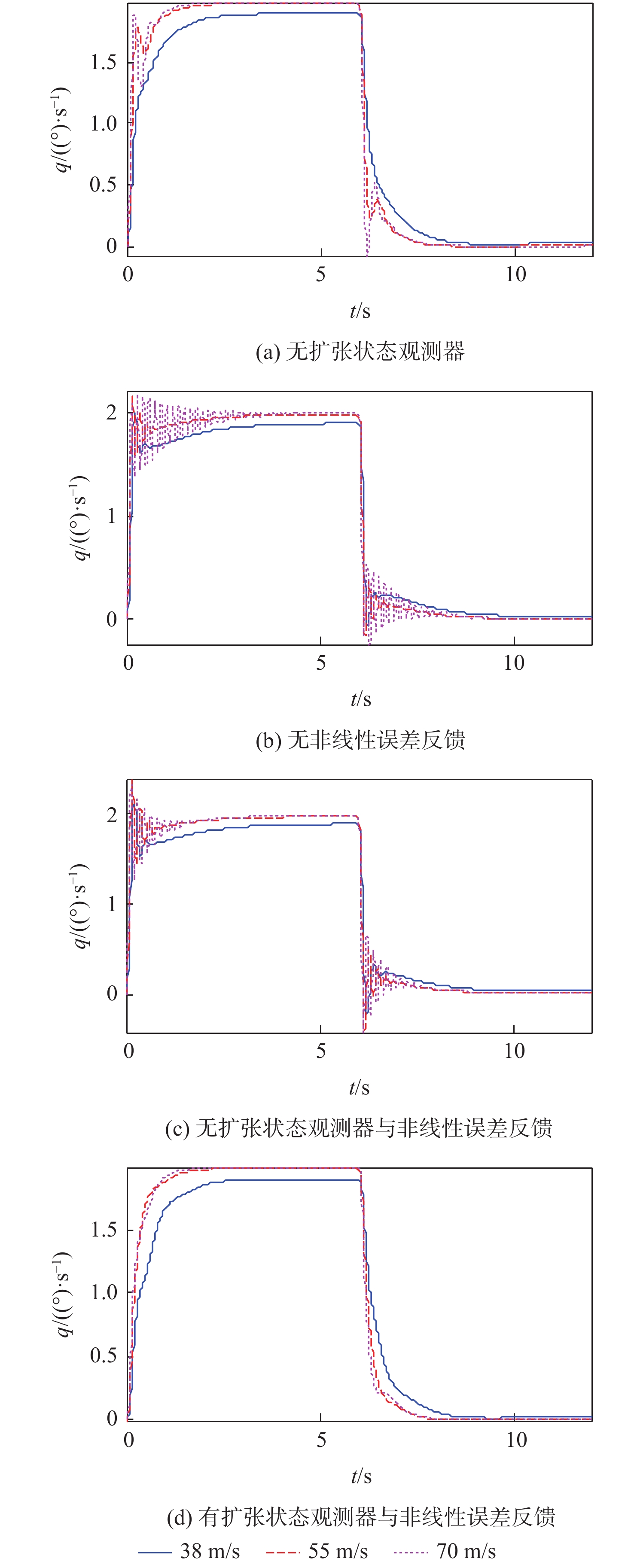
图 10 4种反馈输入下俯仰角速率响应(70 m/s)
Figure 10. Pitch-rate responses under 4 different feedback inputs (70 m/s)

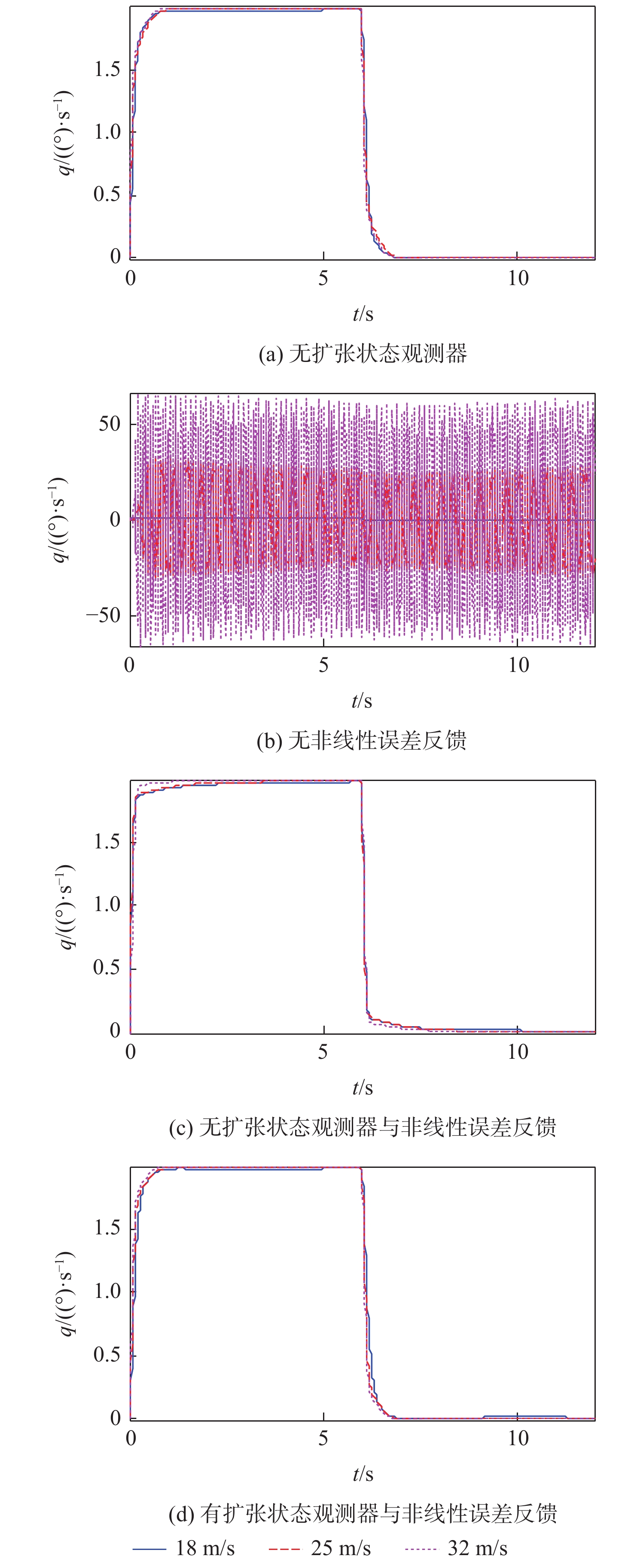
图 14 UAV_A的俯仰角速率控制响应对比(a=1, d=0.02)
Figure 14. Pitch rate responses comparison of UAV_A (a=1, d=0.02)
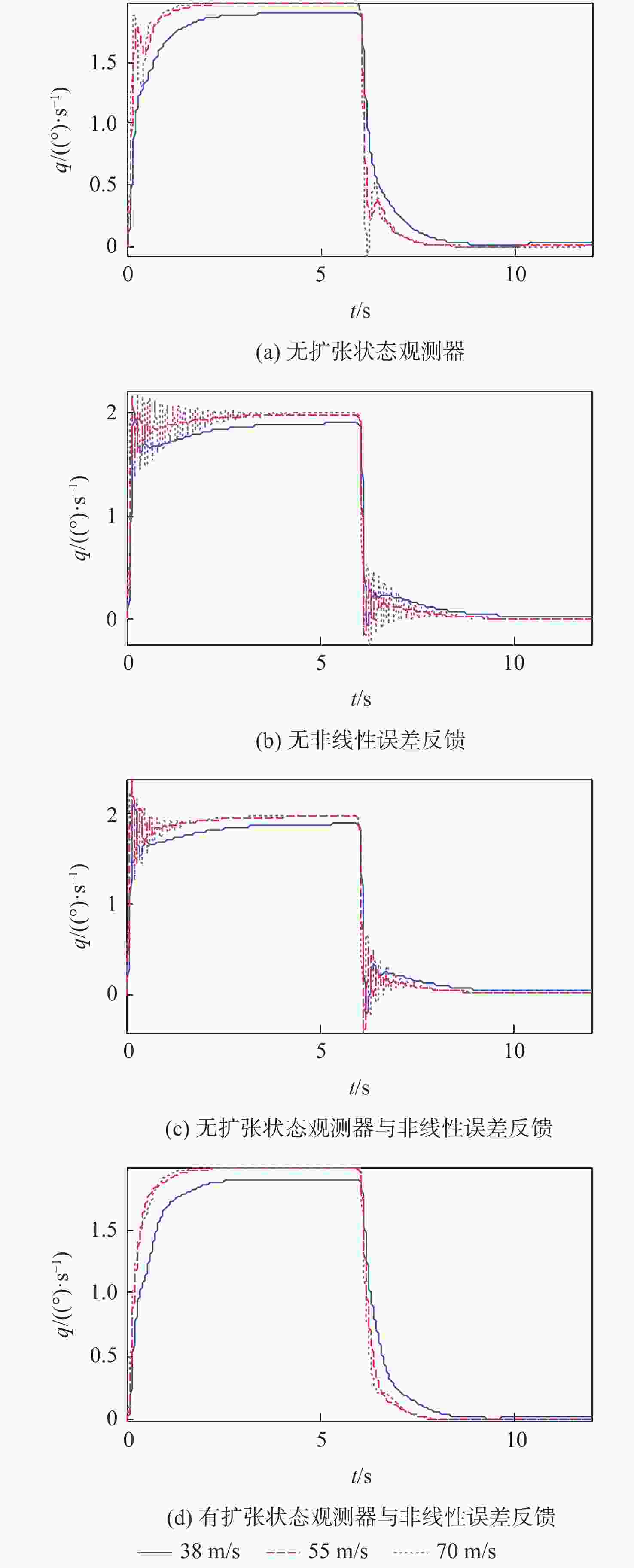
图 15 UAV_B的俯仰角速率控制响应对比(a=0.3, d=10)
Figure 15. Pitch rate responses comparison of UAV_B (a=0.3, d=10)
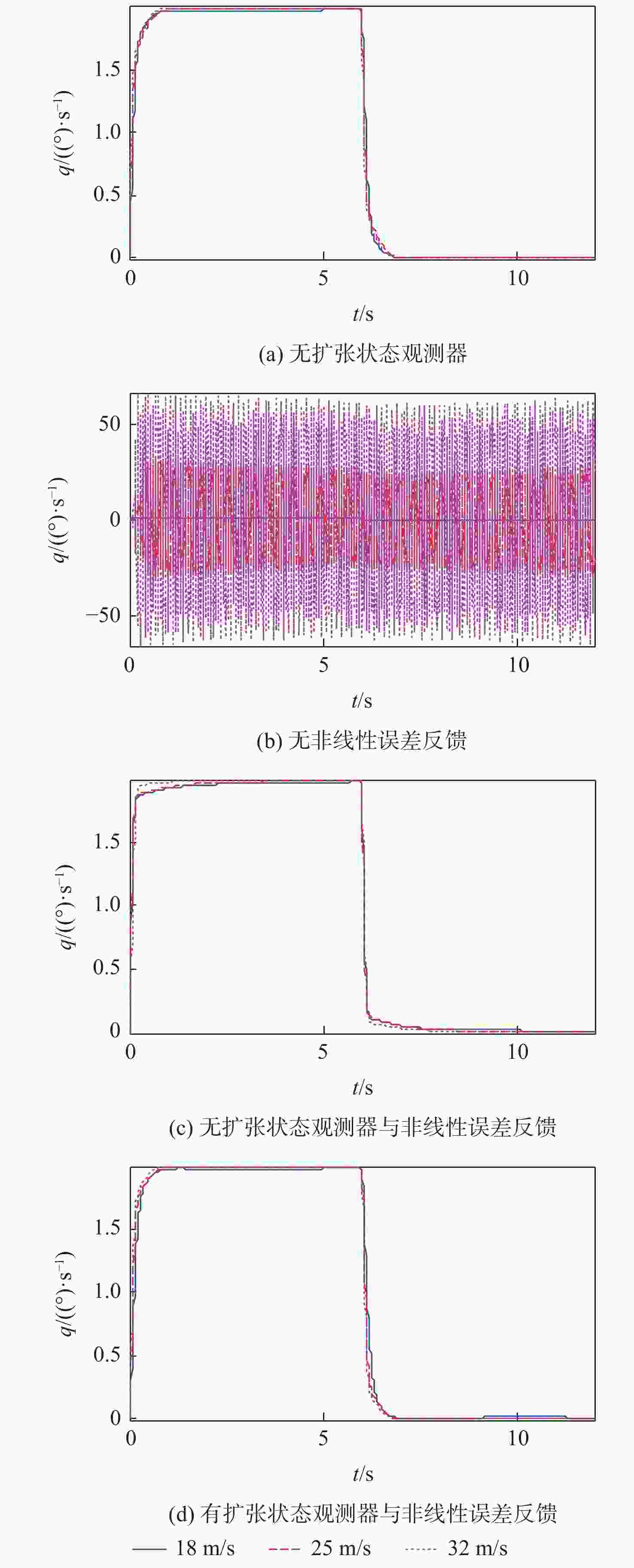
图 16 UAV_C的俯仰角速率控制响应对比(a=0.3, d=15)
Figure 16. Pitch rate responses comparison of UAV_C (a=0.3, d=15)
表 1 3种无人机飞行状态
Table 1. Flight state of 3 UAVs
高度/m 速度/(m˖s−1) UAV_A UAV_B UAV_C UAV_A UAV_B UAV_C 3000 1000 500 262 38 18 5000 1000 500 416 55 25 14000 1000 500 237 70 32  下载: 导出CSV
下载: 导出CSV
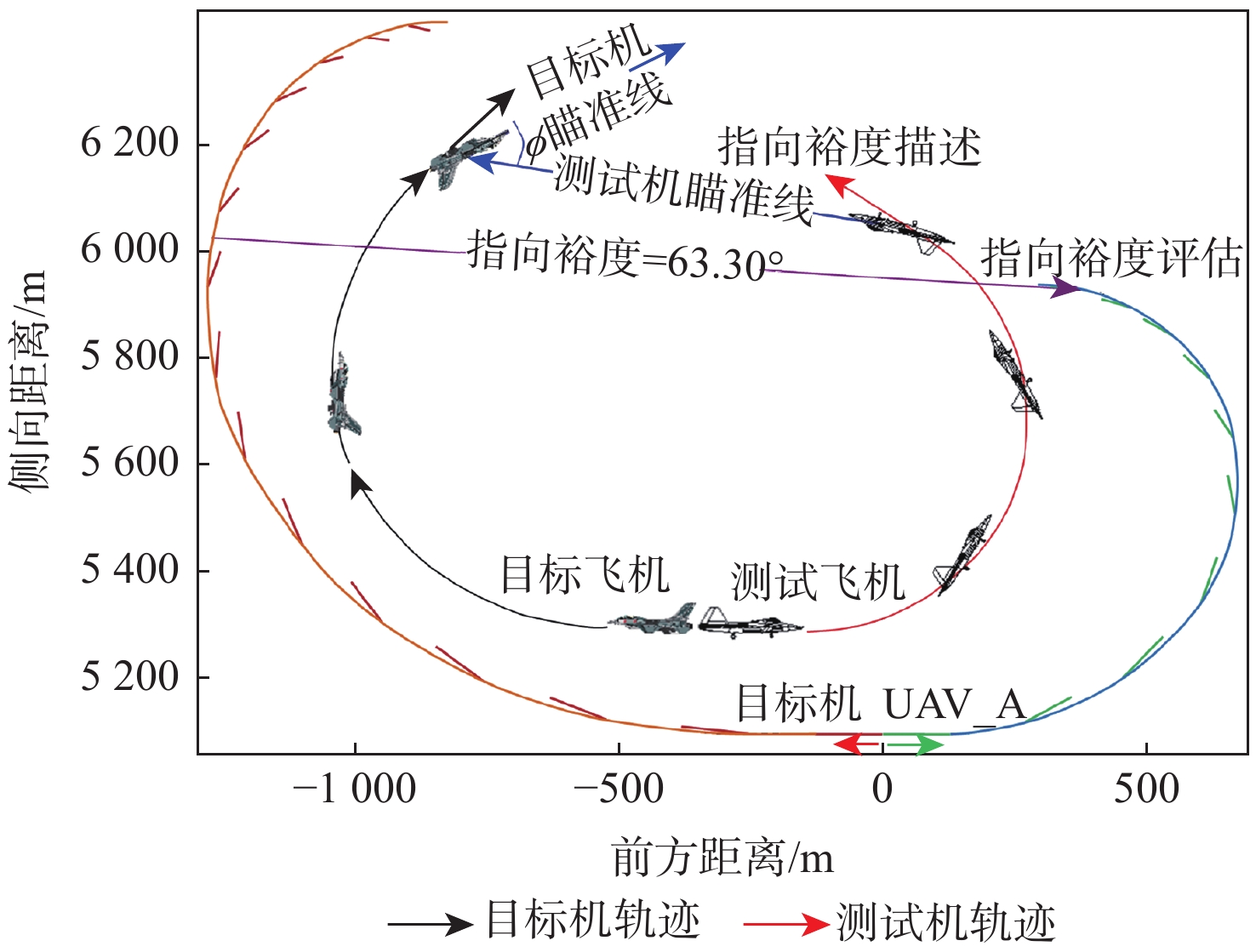
表 2 最小速度筋斗半径
Table 2. Somersault radius under minimum velocity
高度/ m 马赫数 UAV_A半径/m 目标机半径/m 2000 0.4 305 473 5000 0.5 335 469 8000 0.7 548 8000 0.8 663 894
下载: 导出CSV
-
[1] 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.HAN J Q. Active disturbance rejection control technique[M]. Beijing: National Defense Industry Press, 2008(in Chinese). [2] 朱斌. 自抗扰控制入门[M]. 北京: 北京航空航天大学出版社, 2017.ZHU B. Introduction to active disturbance rejection control[M]. Beijing: Beihang University Press, 2017(in Chinese). [3] 孙明玮, 马建顺, 朴敏楠, 等. 高超声速飞行器自抗扰控制方法[M]. 北京: 科学出版社, 2018.SUN M W, MA J S, PIAO M N, et al. Active disturbance rejection control method for hypersonic vehicle [M]. Beijing: Science Press, 2018(in Chinese). [4] 赵志良. 自抗扰控制设计与理论分析[M]. 北京: 科学出版社, 2022.ZHAO Z L. Active disturbance rejection control design and theoretical analysis[M]. Beijing: Science Press, 2022(in Chinese). [5] GAO Z Q. Scaling and bandwidth-parameterization based controller-tuning[C]//Proceedings of the 2003 American Control Conference. Piscataway: IEEE Press, 2003: 4989-4996. [6] TIAN G, GAO Z Q. Benchmark tests of active disturbance rejection control on an industrial motion control platform[C]//Proceedings of the 2009 American Control Conference. Piscataway: IEEE Press, 2009: 5552-5557. [7] ZHENG Q, GAO L, GAO Z Q. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics [C]//Proceedings of the 46th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2007: 3501-3506. [8] 高志强. 自抗扰控制思想探究[J]. 控制理论与应用, 2013, 30(12): 1498-1509. doi: 10.7641/CTA.2013.31087GAO Z Q. On the foundation of active disturbance rejection control[J]. Control Theory & Applications, 2013, 30(12): 1498-1509(in Chinese). doi: 10.7641/CTA.2013.31087 [9] ZHANG B, ZHU X P, ZHOU Z, et al. Design of nonlinear flight control law for a tailless unmanned aerial vehicle [C]//Proceedings of the IEEE International Conference of IEEE Region 10. Piscataway: IEEE Press, 2013: 1-4. [10] 薛文超, 黄朝东, 黄一. 飞行制导控制一体化设计方法综述[J]. 控制理论与应用, 2013, 30(1): 1511-1520.XUE W C, HUANG C D, HUANG Y. Design methods for the integrated guidance and control system[J]. Control Theory & Applications, 2013, 30(1): 1511-1520(in Chinese). [11] 张波, 周洲, 祝小平. 自抗扰实现飞翼布局无人机全包线飞行控制[J]. 控制理论与应用, 2015, 32(10): 1370-1377.ZHANG B, ZHOU Z, ZHU X P. Practical active disturbance rejection solution to a fly wing UAV flight control within full envelope[J]. Control Theory & Applications, 2015, 32(10): 1370-1377(in Chinese). [12] 刘基玉, 刘林, 樊战旗. 改进 ADRC 及其在飞行增稳控制中的应用[J]. 飞行力学, 2010, 28(3): 35-38.LIU J Y, LIU L, FAN Z Q. Improved ADRC and its application in flight control augmentation[J]. Flight Dynamics, 2010, 28(3): 35-38(in Chinese). [13] 石嘉, 裴忠才, 唐志勇, 等. 改进型自抗扰四旋翼无人机控制系统设计与实现[J]. 北京航空航天大学学报, 2021, 47(9): 1823-1831.SHI J, PEI Z C, TANG Z Y, et al. Design and realization of an improved active disturbance rejection quadrotor UAV control system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1823-1831(in Chinese). [14] 崔乃刚, 张亮, 韦常柱, 等. 可重复使用运载器大姿态机动自抗扰控制[J]. 中国惯性技术学报, 2017, 25(3): 387-394.CUI N G, ZHANG L, WEI C Z, et al. Active disturbance rejection control for reusable launch vehicle with large attitude maneuver[J]. Journal of Chinese Inertial Technology, 2017, 25(3): 387-394(in Chinese). [15] SUN M, WANG Z H, CHEN Z Q. Practical solution to attitude control within wide envelope[J]. Aircraft Engineering and Aerospace Technology, 2014, 86(2): 117-128. doi: 10.1108/AEAT-10-2012-0167 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 444
- HTML全文浏览量: 103
- PDF下载量: 30
- 被引次数: 0
