



Reconfiguration control and motion simulation of tilt-rotor aircraft with multilinks
-
摘要:
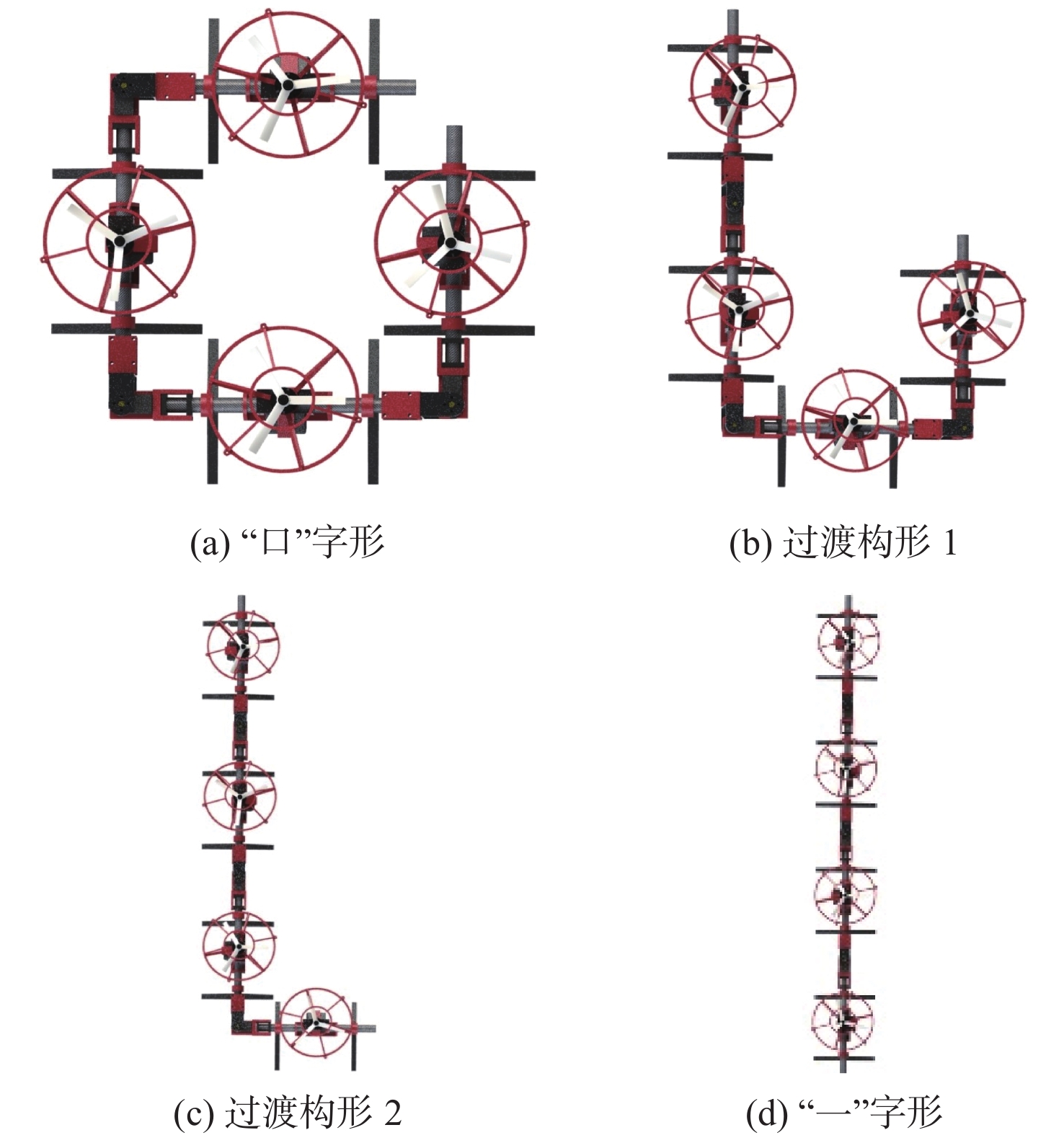
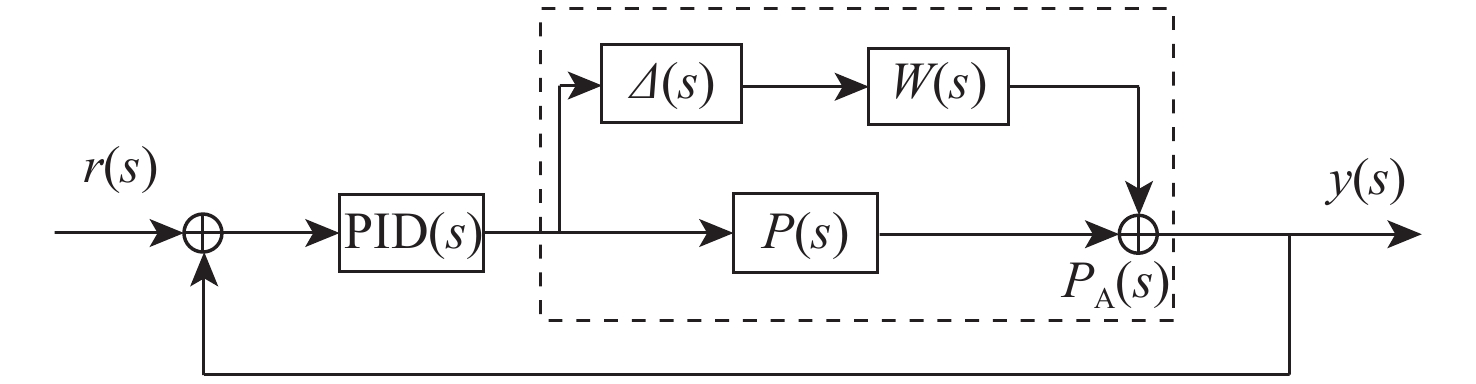
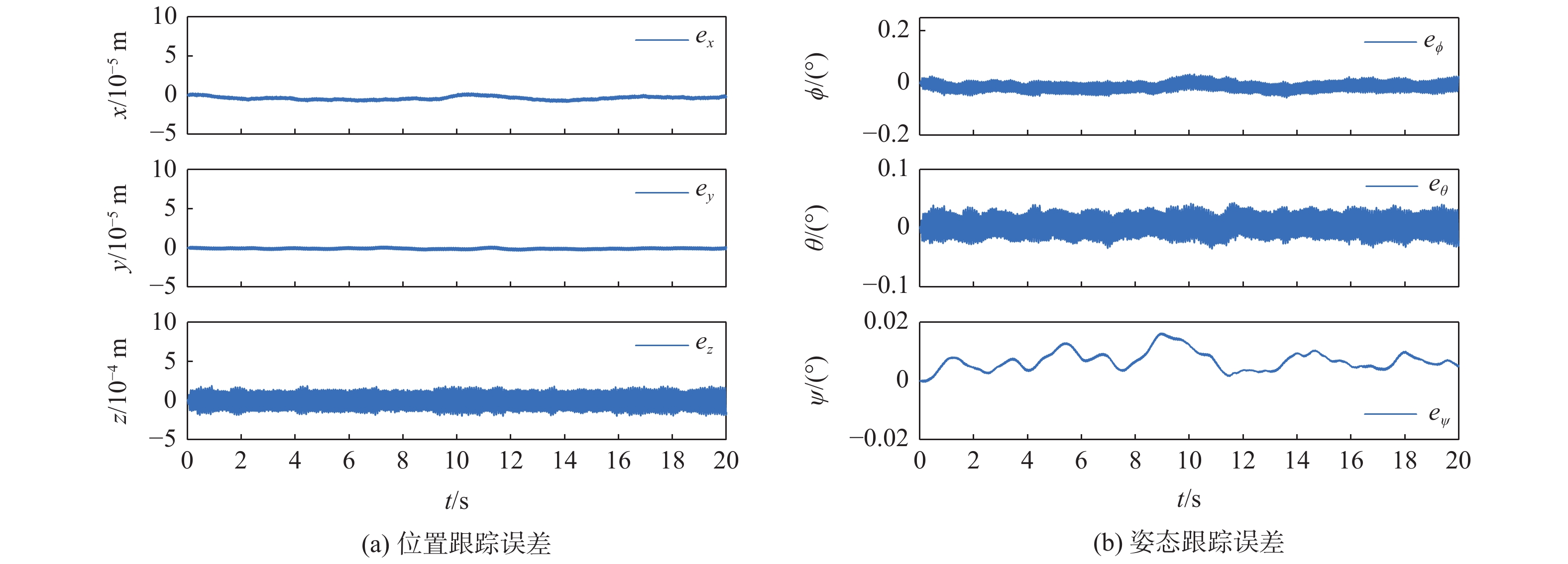
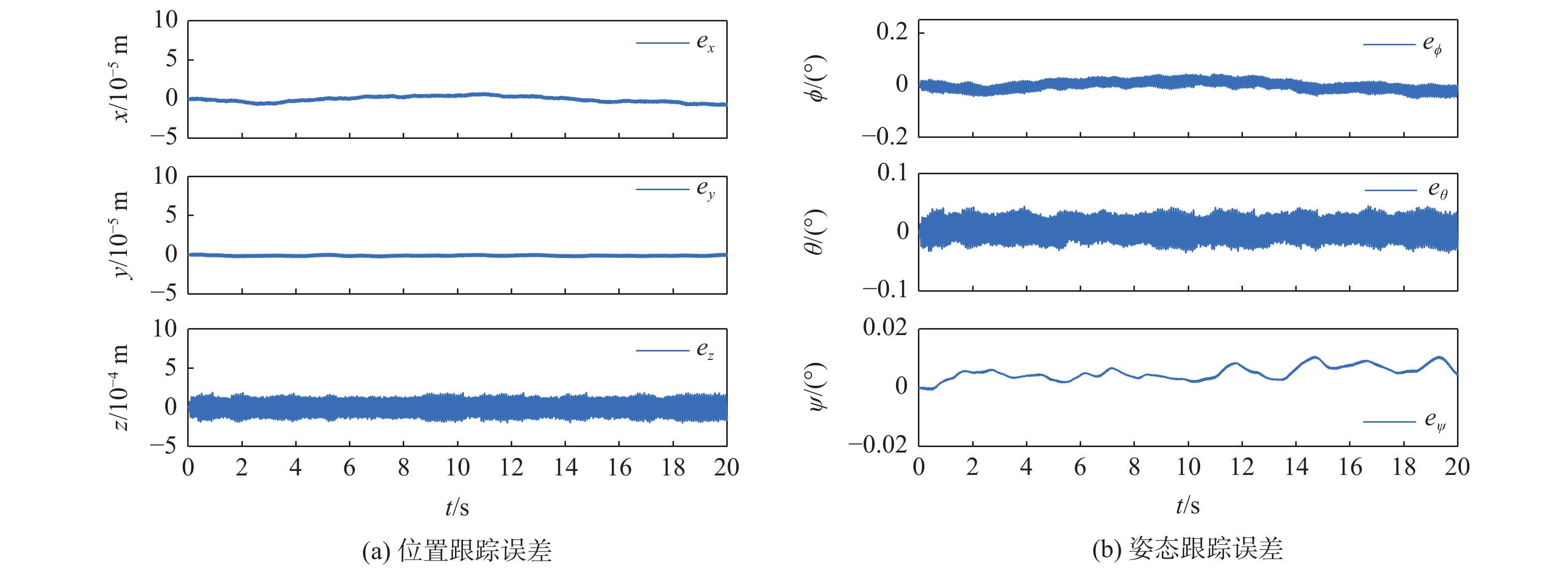
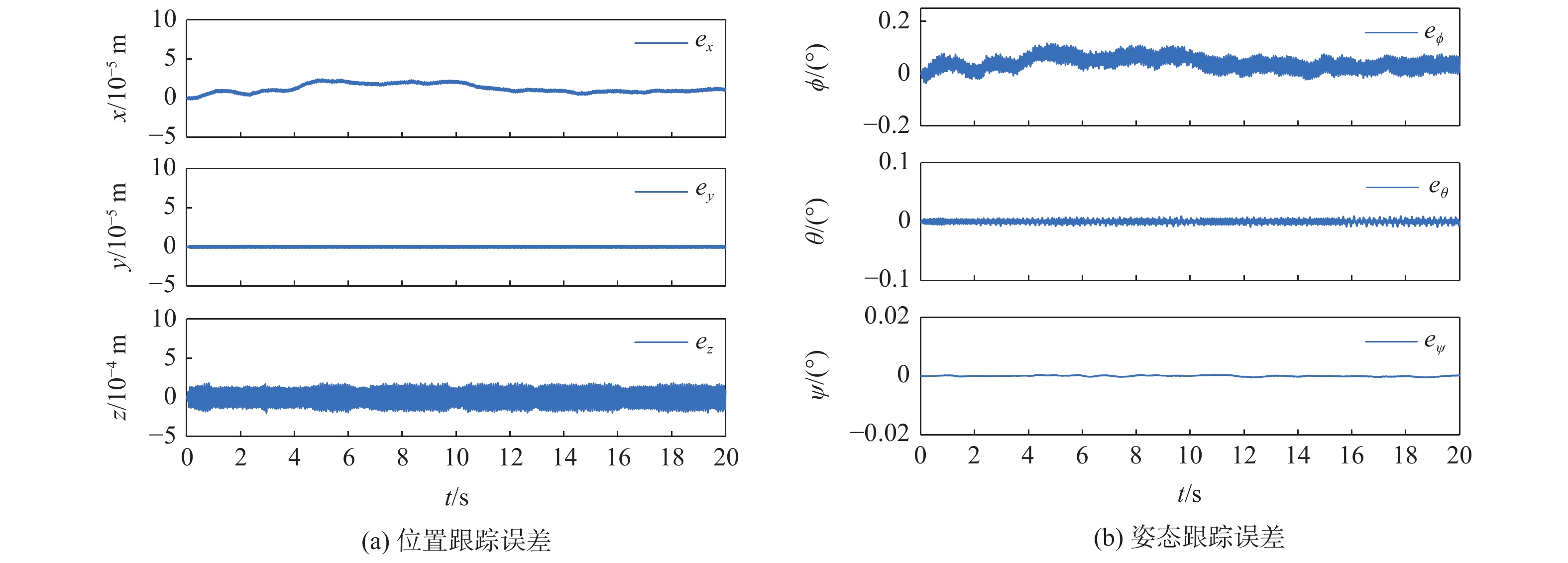
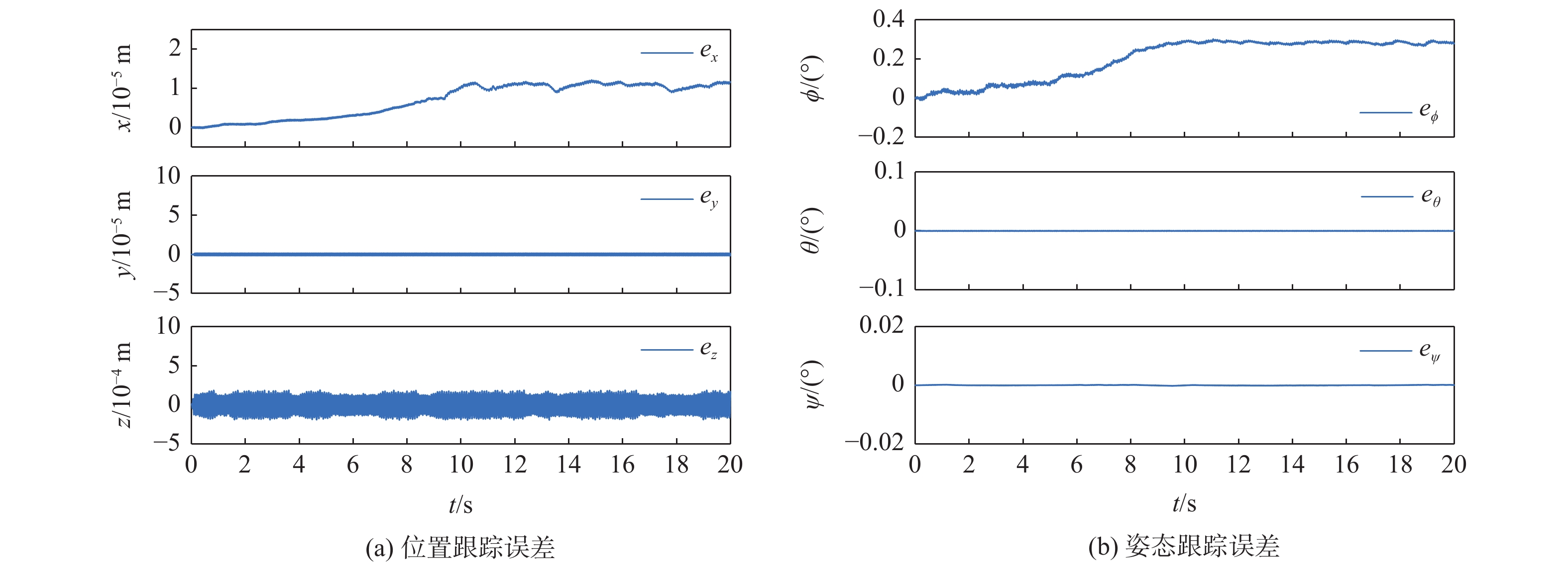
多节链式旋翼飞行器具有构形可变换的特点,是应对运动空间变化的一种有效构形设计方式。受限于构形变化下电机共轴带来的横向转动力矩的缺失,多节链式旋翼飞行器的动态重构飞行具有无法达成的临界构形区间。为此,设计了具备横向倾转的链式旋翼机体结构,以单机臂为模块化结构基本单元,通过旋转关节实现水平向的构形变化,机臂中段配置倾转矢量关节,用以提供滚转力矩支撑。在机体运动学、动力学模型推导的基础上,引入虚拟控制量对控制分配进行线性化处理,利用Moore-Penrose伪逆求解控制效率矩阵,面向全构形变换设计了基于全驱动控制的飞行控制律。对飞行器典型构形位姿控制的稳定性、构形变换控制的可行性进行实验论证,仿真结果表明:在飞行器各典型构形飞行状态下,姿态各轴向角度跟踪最大误差不超过0.05°,构形变换过程中,姿态各轴向角度跟踪误差不超出0.1°,2种情况下,位置偏差均能控制在1 mm以内,飞行器具备各构形下稳定飞行及构形变换的能力,为进一步开展动态重构及稳健飞行提供了必要条件。
Abstract:Multilinks rotorcraft has the characteristic of configuration transformation, which is an effective configuration design method to deal with the variation of motion space. The dynamic reconfiguration flight of Multilinks rotorcraft has a critical configuration interval that cannot be achieved because of the lack of lateral rotation moment cauased by motor co-axis under configuration change.In order to solve this issue, a chain rotor body structure with lateral tilting was designed, in which, the single arm was taken as the basic modular structure unit, the horizontal configuration was changed by rotating joints, and tilting vector joints were configured in the middle of the arm to provide rolling moment support. Based on the derivation of the kinematics and dynamics models, the control distribution was linearized by introducing virtual control variables, the control efficiency matrix was solved by using the Moore-Penrose pseudo-inverse, and the flight control law was designed for the full configuration transformation.Finally, experiments were carried out to show that configuration change is controllable and that the fully-actuated control stability of a typical configuration is possible. The simulation results show that the maximum error of axial angle tracking of attitude is less than 0.05° during all the typical configurations, in the condition of the whole configuration transformation it’s less than 0.1°, and in both cases, the position deviation can be controlled within 1 mm. The aircraft can fly stably when the configuration changes, which provides the necessary conditions for dynamic reconstruction and robust flight.
-
Key words:
- full drive control /
- tilt-rotor /
- variable structure /
- multilinks /
- dynamic reconfiguration /
- narrow space
-
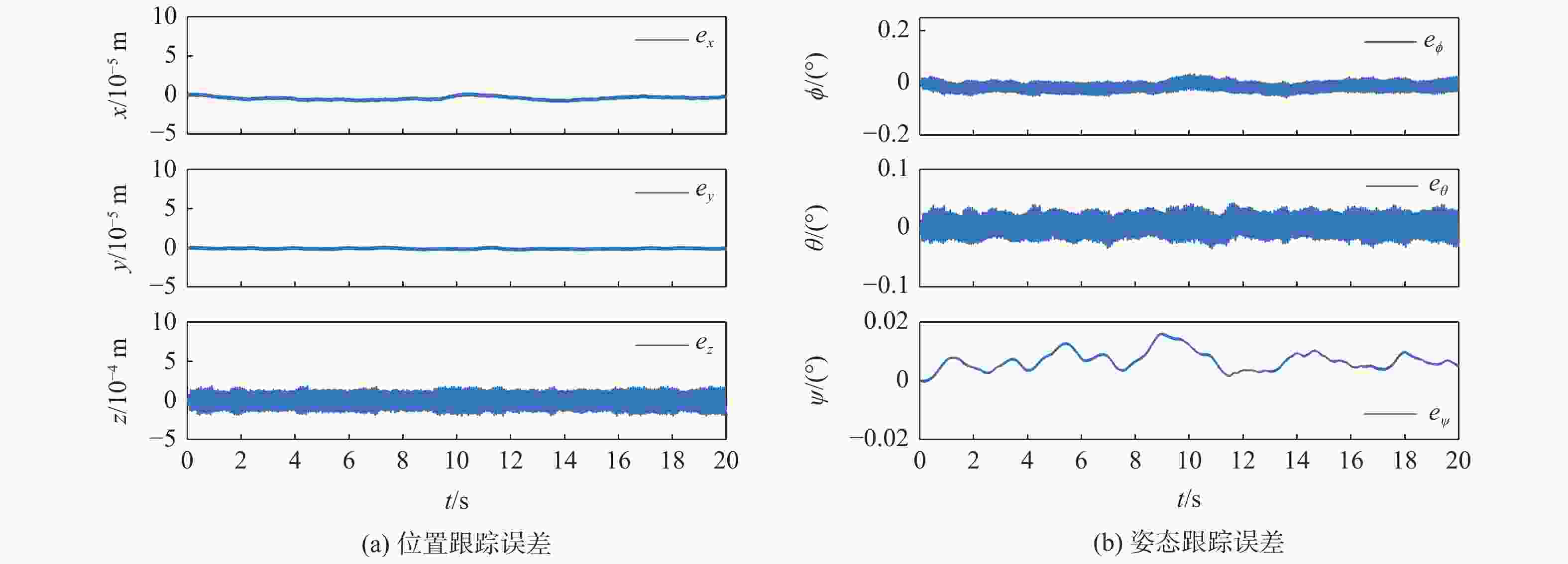
图 4 “口”字形构形位姿跟踪误差
Figure 4. Tracking error of position and posture of the aircraft in a square shape
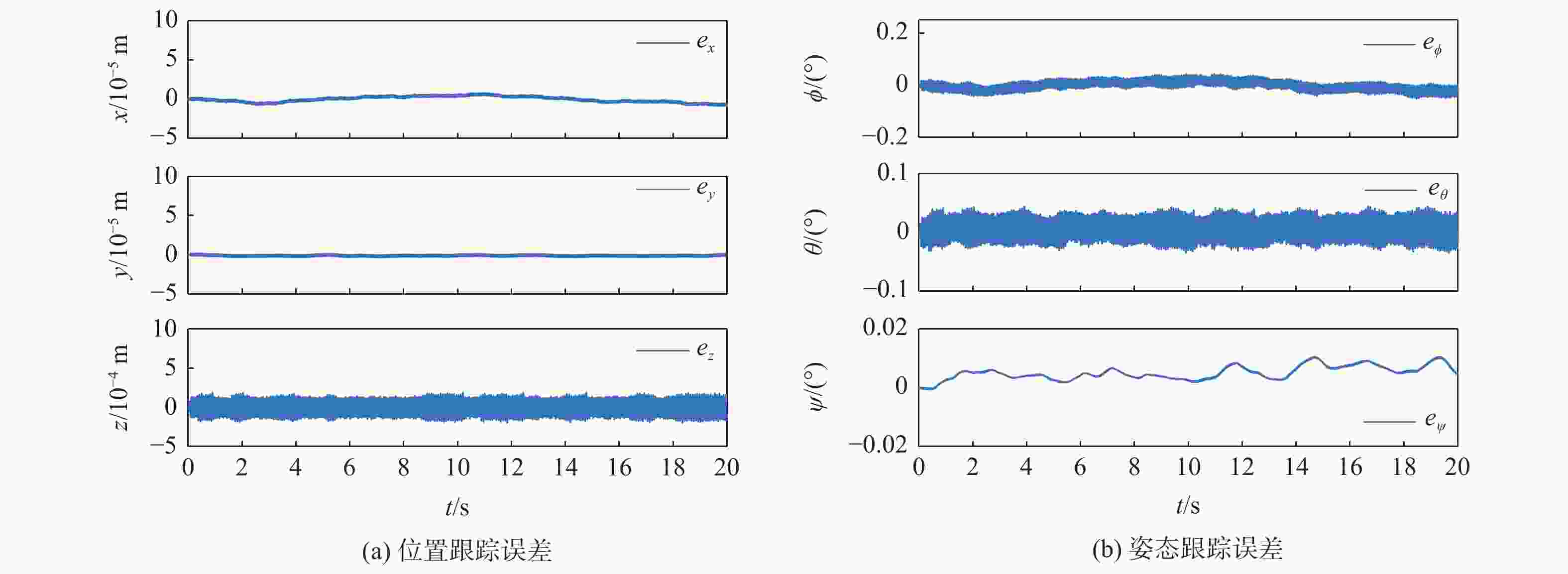
图 5 过渡构形1位姿跟踪误差
Figure 5. Tracking error of position and posture of transitional configuration 1
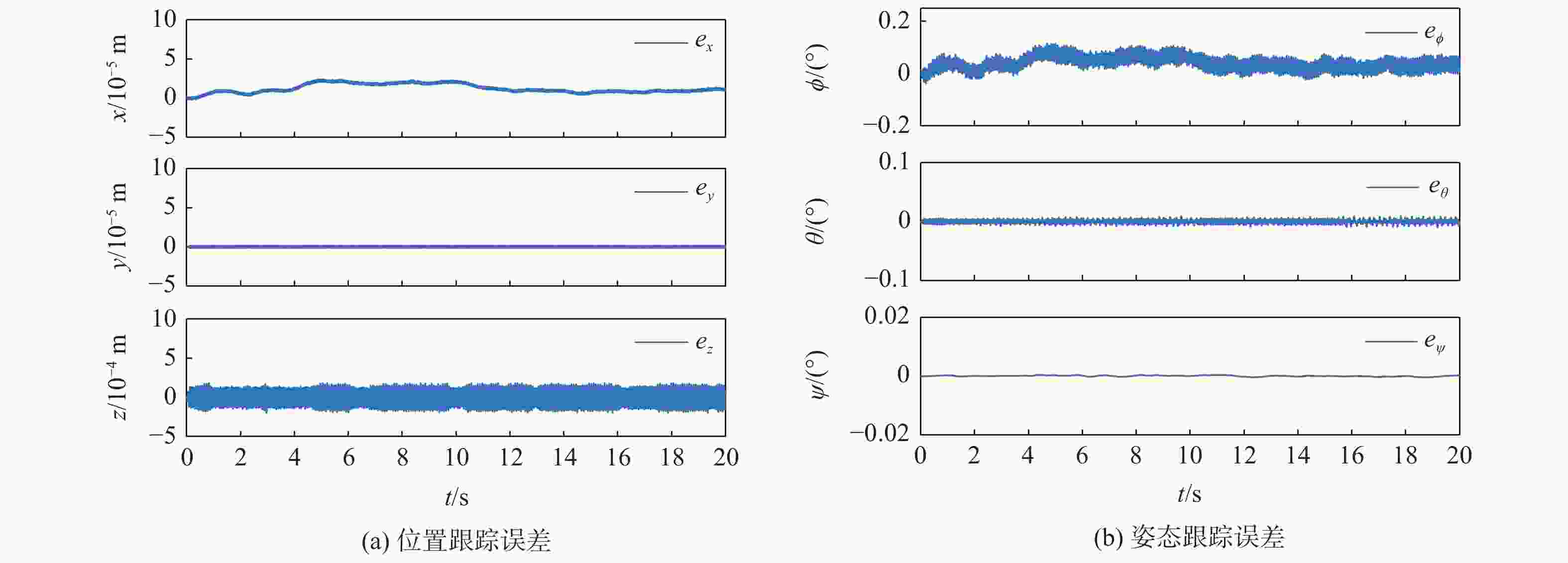
图 6 过渡构形2位姿跟踪误差
Figure 6. Tracking error of position and posture of transitional configuration 2
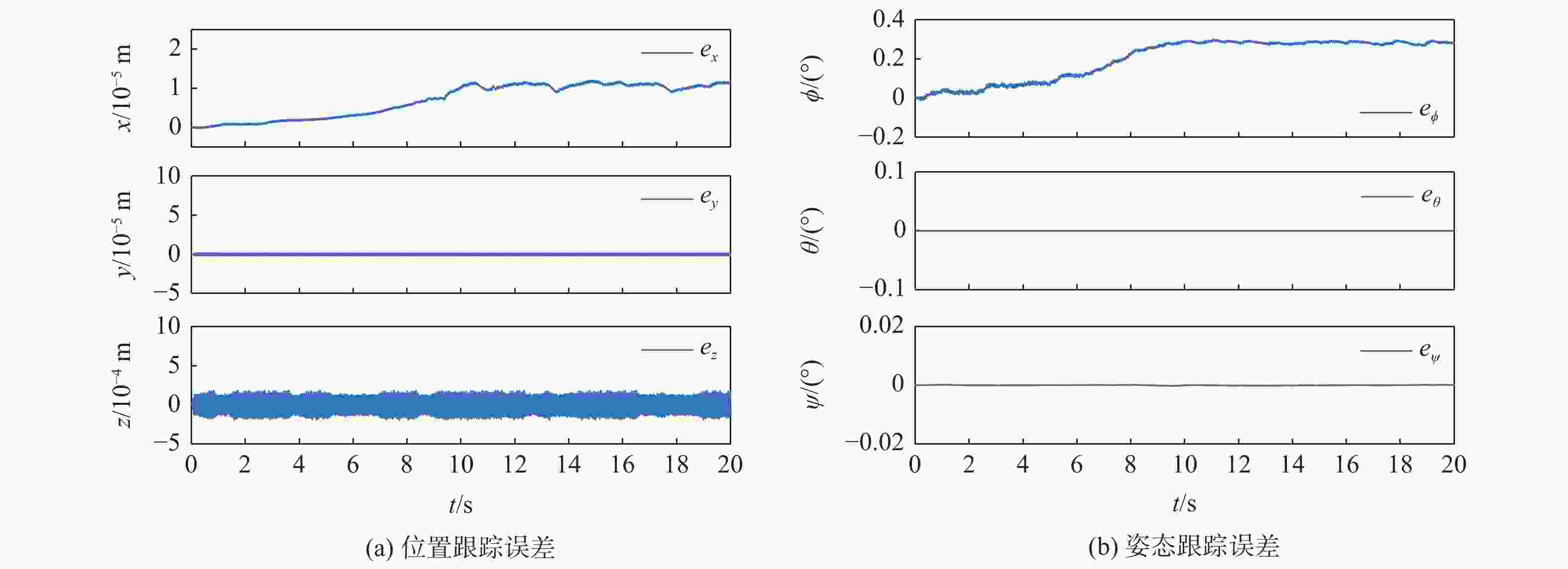
图 7 “一”字形构形位姿跟踪误差
Figure 7. Tracking error of position and posture of the aircraft in a straight line shape
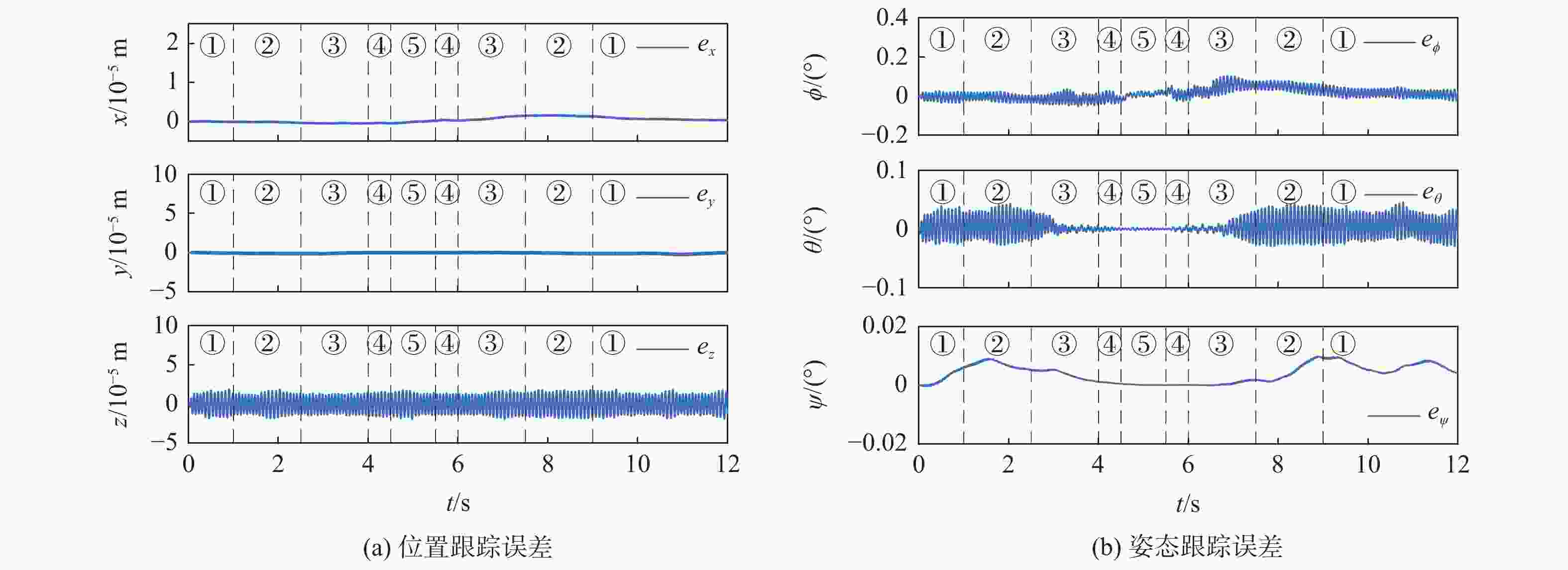
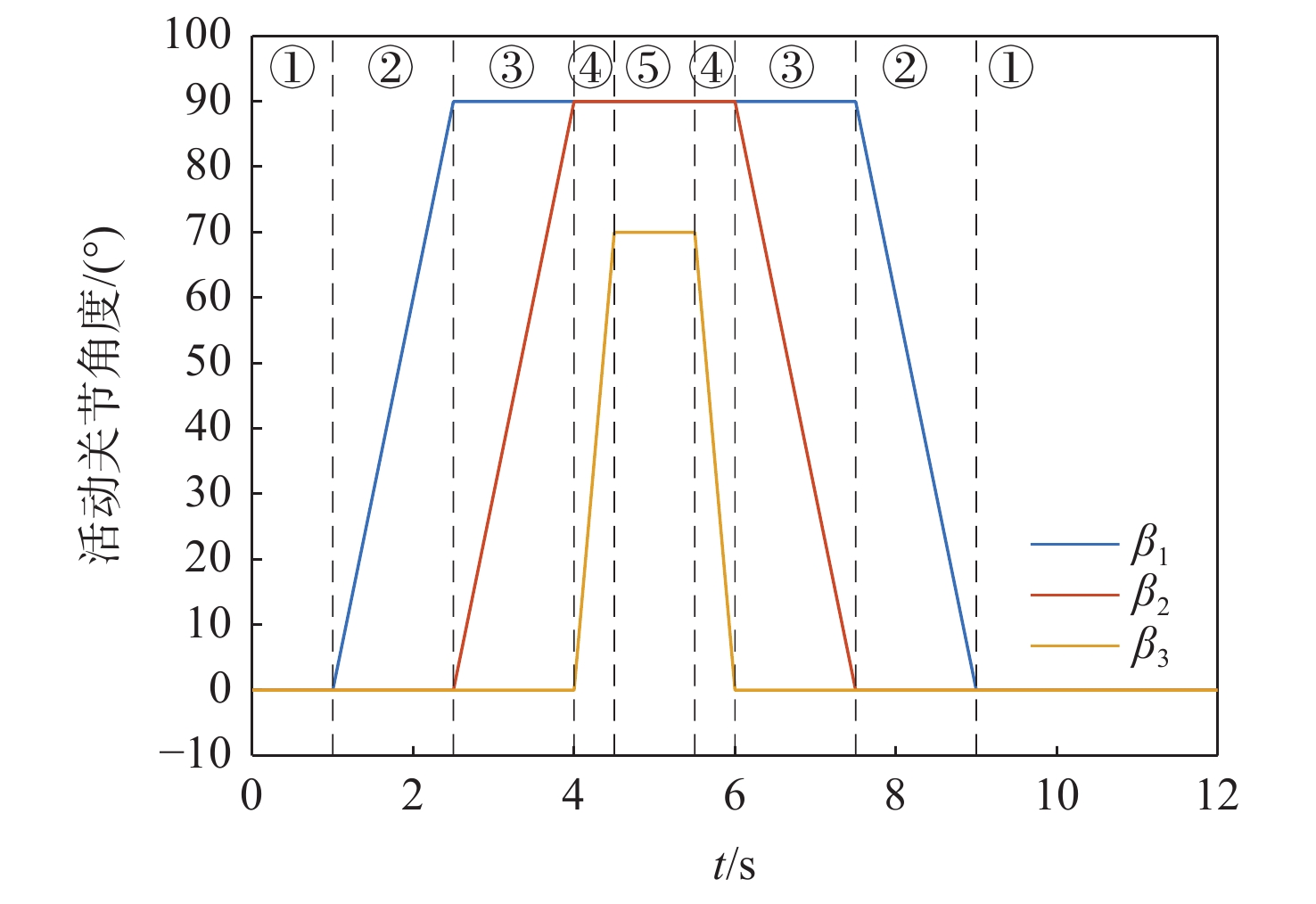
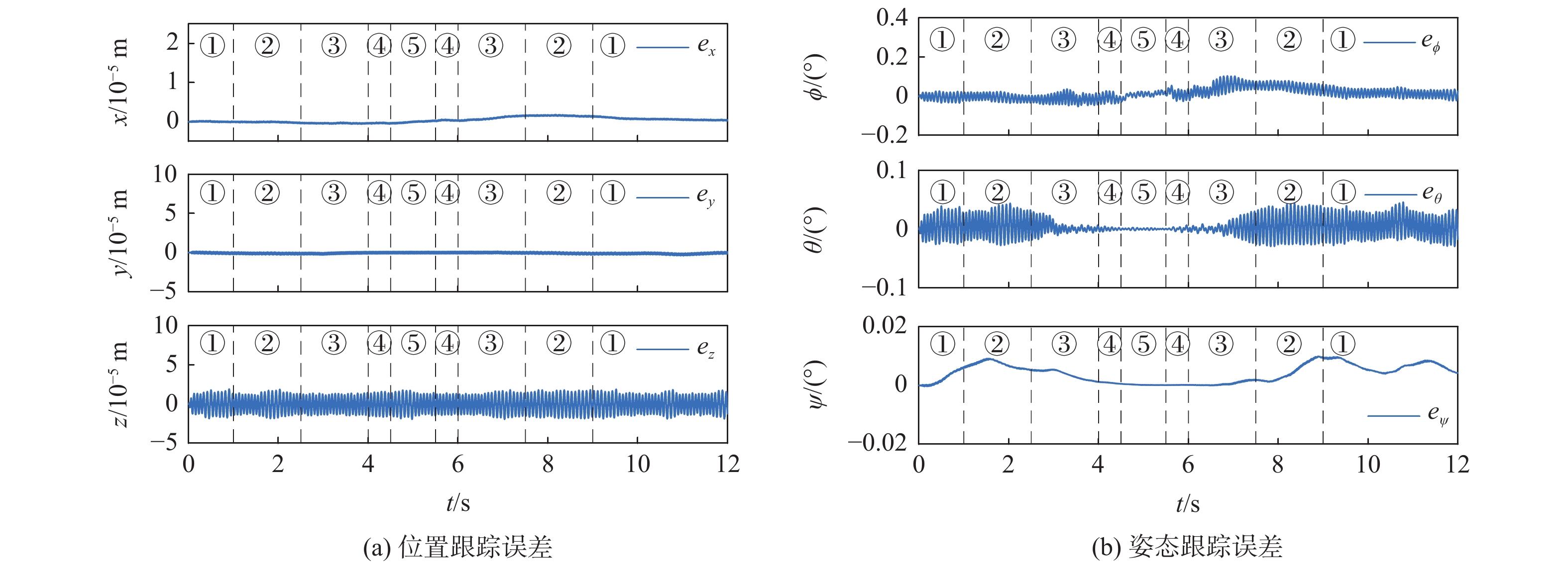
图 9 构型连续变化下飞行器位姿跟踪误差
Figure 9. Tracking error of aircraft’s position and posture when it’s configuration continuously changes
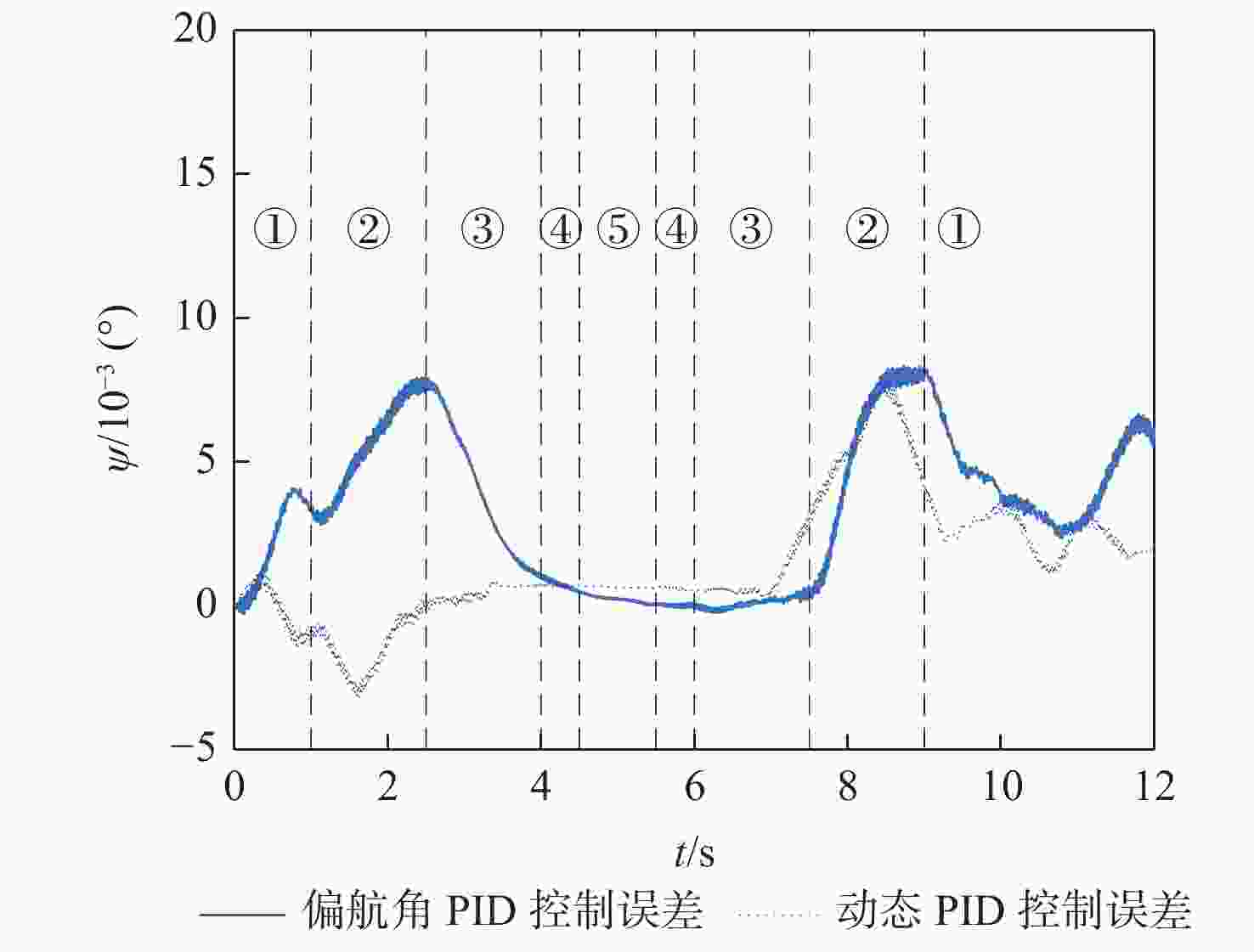
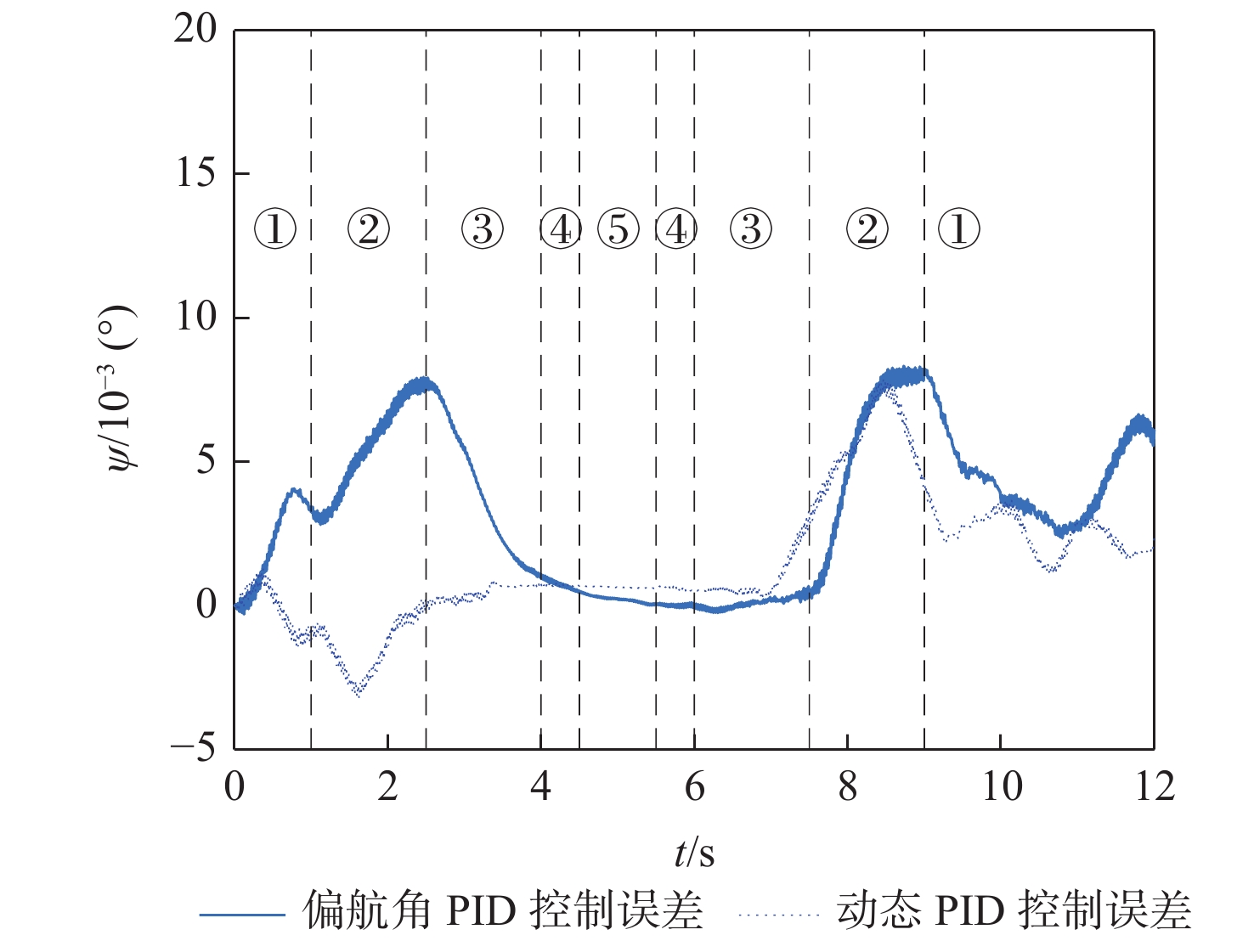
图 10 偏航角PID控制与动态PID动态特性对比
Figure 10. Comparison of yaw angle dynamic characteristics between PID control and dynamic PID control
表 1 动态PID参数
Table 1. Parameters of dynamic PID
状态 $ {K_{\mathrm{P}}} $ $ {K_{\mathrm{D}}} $ ① 40 15 ② 32 20 ③ 40 30 ④ 100 80  下载: 导出CSV
下载: 导出CSV
-
[1] 陈宗基, 魏金钟, 王英勋, 等. 无人机自主控制等级及其系统结构研究[J]. 航空学报, 2011, 32(6): 1075-1083.CHEN Z J, WEI J Z, WANG Y X, et al. UAV autonomous control levels and system structure[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(6): 1075-1083(in Chinese). [2] 张钊, 杨忠, 段雨潇, 等. 主动变形四旋翼自抗扰飞行控制方法[J]. 控制理论与应用, 2021, 38(4): 444-456.ZHANG Z, YANG Z, DUAN Y X, et al. Active disturbance rejection control method for actively deformable quadrotor[J]. Control Theory & Applications, 2021, 38(4): 444-456(in Chinese). [3] 卢凯文, 杨忠, 张秋雁, 等. 推力矢量可倾转四旋翼自抗扰飞行控制方法[J]. 控制理论与应用, 2020, 37(6): 1377-1387.LU K W, YANG Z, ZHANG Q Y, et al. Active disturbance rejection flight control method for thrust-vectored quadrotor with tiltable rotors[J]. Control Theory & Applications, 2020, 37(6): 1377-1387(in Chinese). [4] 陶广宏, 房立金, 徐鑫霖, 等. 多节链式移动机器人单元模块研究与设计[J]. 机器人, 2018, 40(6): 887-893.TAO G H, FANG L J, XU X L, et al. Research and design of the unit module of the multi-link mobile robot[J]. Robot, 2018, 40(6): 887-893(in Chinese). [5] 张杰, 吴森堂. 一种变体飞行器的动力学建模与动态特性分析[J]. 北京航空航天大学学报, 2015, 41(1): 58-64.ZHANG J, WU S T. Dynamic modeling for a morphing aircraft and dynamic characteristics analysis[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1): 58-64(in Chinese). [6] BUCKI N, MUELLER M W. Design and control of a passively morphing quadcopter[C]//Proceedings of the International Conference on Robotics and Automation. Piscataway: IEEE Press, 2019: 9116-9122. [7] FALANGA D, KLEBER K, MINTCHEV S, et al. The foldable drone: A morphing quadrotor that can squeeze and fly[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 209-216. doi: 10.1109/LRA.2018.2885575 [8] BAI Y, GURURAJAN S. Evaluation of a baseline controller for autonomous “figure-8” flights of a morphing geometry quadcopter: Flight performance[J]. Drones, 2019, 3(3): 70. doi: 10.3390/drones3030070 [9] ZHAO M J, KAWASAKI K, ANZAI T, et al. Transformable multirotor with two-dimensional multilinks[J]. International Journal of Robotics Research, 2018, 37(9): 1085-1112. doi: 10.1177/0278364918801639 [10] MAKI T, ZHAO M J, SHI F, et al. Model reference adaptive control of multirotor for missions with dynamic change of payloads during flight[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2020: 7433-7439. [11] ANZAI T, ZHAO M J, MUROOKA M, et al. Design, modeling and control of fully actuated 2D transformable aerial robot with 1 DoF thrust vectorable link module[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2019: 2820-2826. [12] 赵昌丽, 郭达, 王续乔, 等. 可动态重构的旋翼飞行器设计与运动特性分析[J]. 机器人, 2021, 43(5): 620-628.ZHAO C L, GUO D, WANG X Q, et al. Design and motion characteristics analysis on a dynamically reconfigurable rotorcraft[J]. Robot, 2021, 43(5): 620-628(in Chinese). [13] ANZAI T, ZHAO M, NOZAWA S, et al. Aerial grasping based on shape adaptive transformation by HALO: Horizontal plane transformable aerial robot with closed-loop multilinks structure[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2018: 6990-6996. [14] KAMEL M, VERLING S, ELKHATIB O, et al. The voliro omniorientational hexacopter: An agile and maneuverable tiltable-rotor aerial vehicle[J]. IEEE Robotics & Automation Magazine, 2018, 25(4): 34-44. [15] RAJAPPA S, RYLL M, BÜLTHOFF H H, et al. Modeling, control and design optimization for a fully-actuated hexarotor aerial vehicle with tilted propellers[C]//Proceedings of the IEEE International Conference on Robotics and Automation . Piscataway: IEEE Press, 2015: 4006-4013. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 194
- HTML全文浏览量: 78
- PDF下载量: 21
- 被引次数: 0
