



-
摘要:
针对时延问题对集群稳定性的影响,对牵制控制策略进行研究,利用反馈线性化将水下无人潜航器(AUV)模型简化为二阶积分器模型,研究了具有时延的水下无人潜航器集群下的编队控制问题,并将一致性控制与牵制控制相结合。分析了输入时延和通信时延对水下无人潜航器集群系统的影响,应用Nyquist判据控制理论进行证明,得到了集群中被牵制水下无人潜航器和未被牵制水下无人潜航器组成的系统能渐进收敛达到一致性的充分必要条件。通过数值仿真验证了定理的正确性。
Abstract:Addressing the impact of latency issues on cluster stability. The traction control strategy is studied. Through the use of feedback linearization, the autonomous underwater vehicle (AUV) model is reduced to a second-order integrator model. The formation control problem of multiple AUV clusters with time delay is examined, and the traction control and consistency control are combined. The influence of input delay and communication delay on the AUV cluster system is analyzed. The Nyquist criterion control theory is used to prove it. We provide the sufficient and necessary conditions for the system’s asymptotic convergence, which is made up of the cluster’s pinned and unpinned AUV. Finally, the correctness of the theorem is further verified by numerical simulation.
-
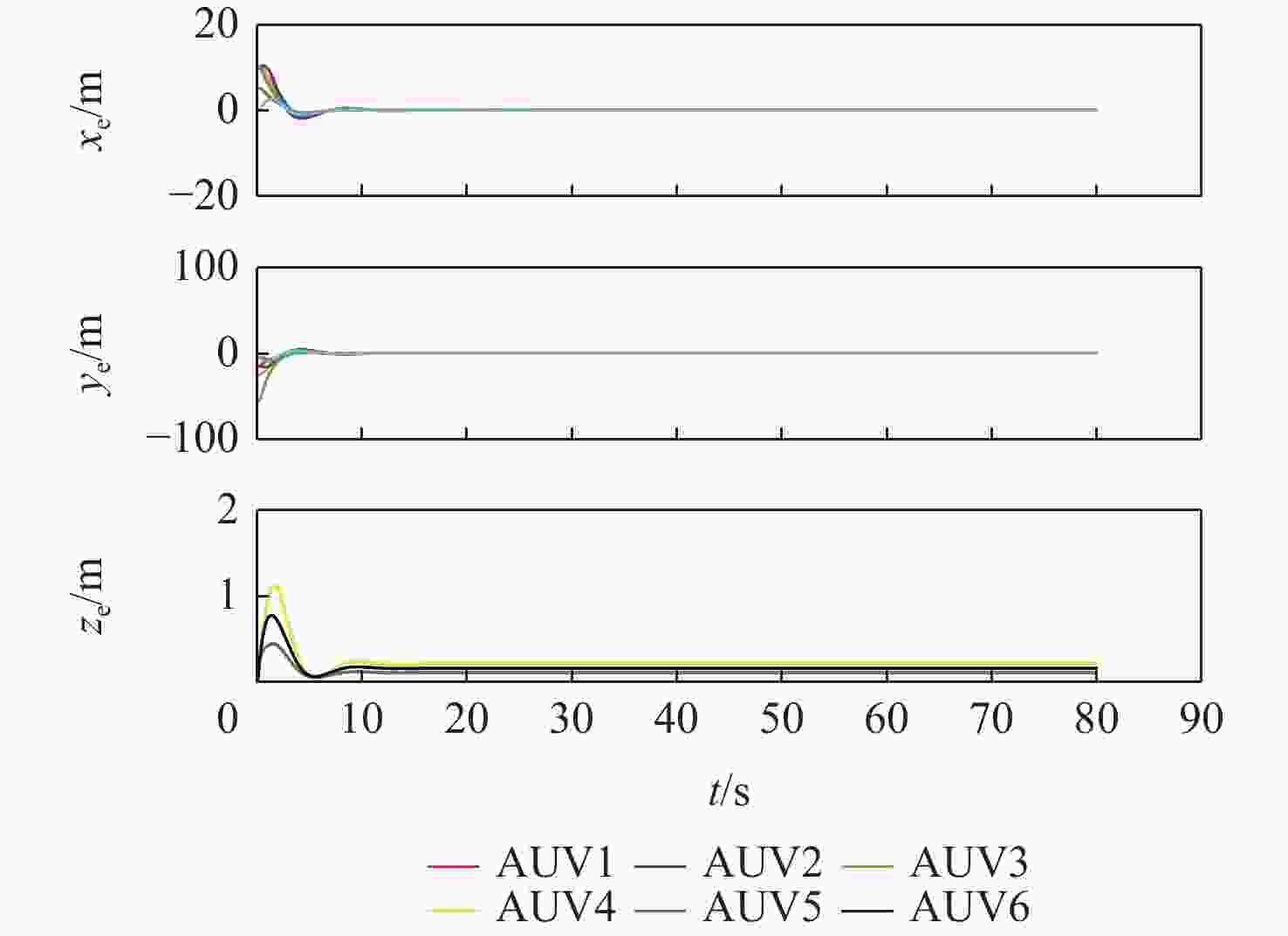
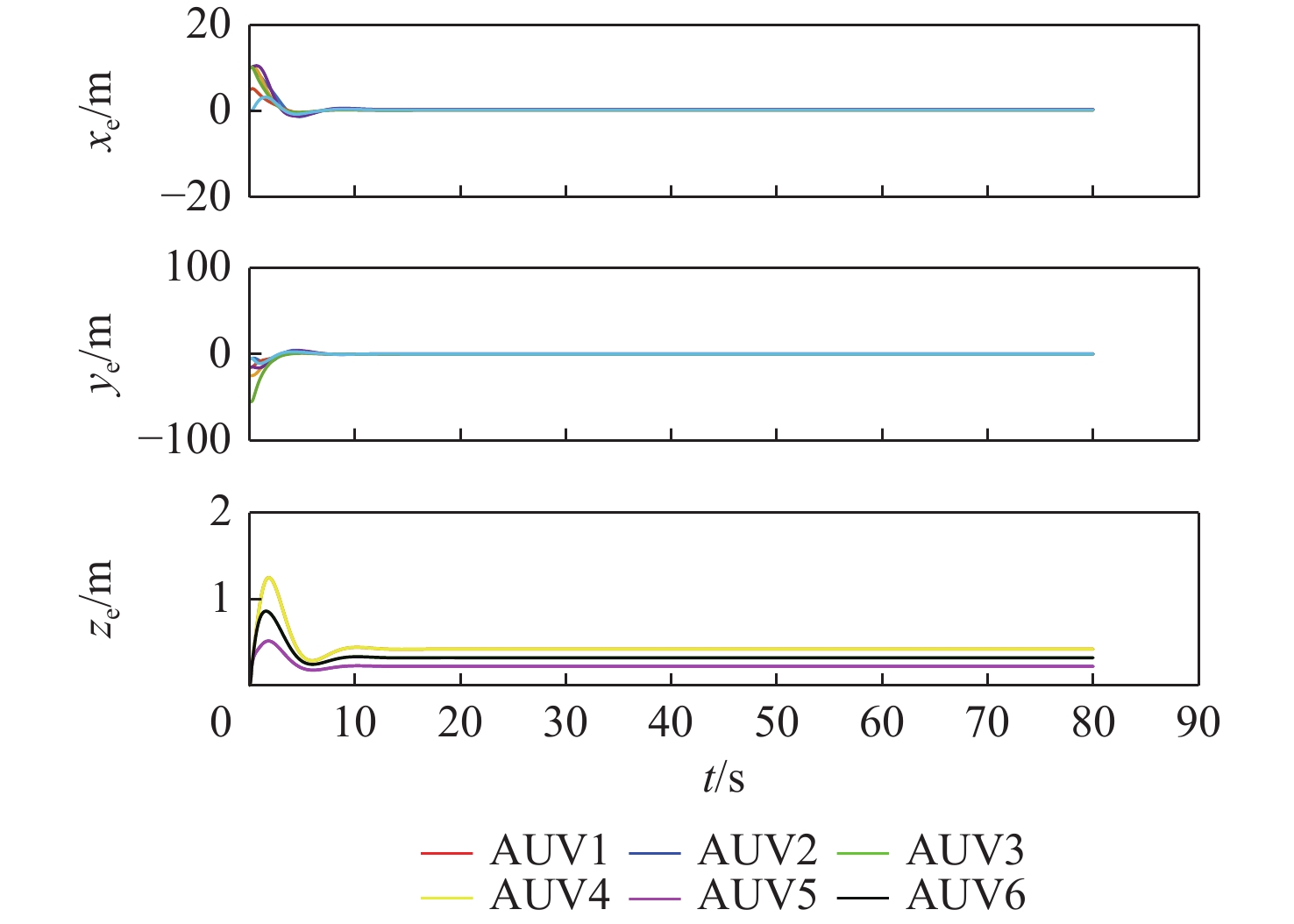
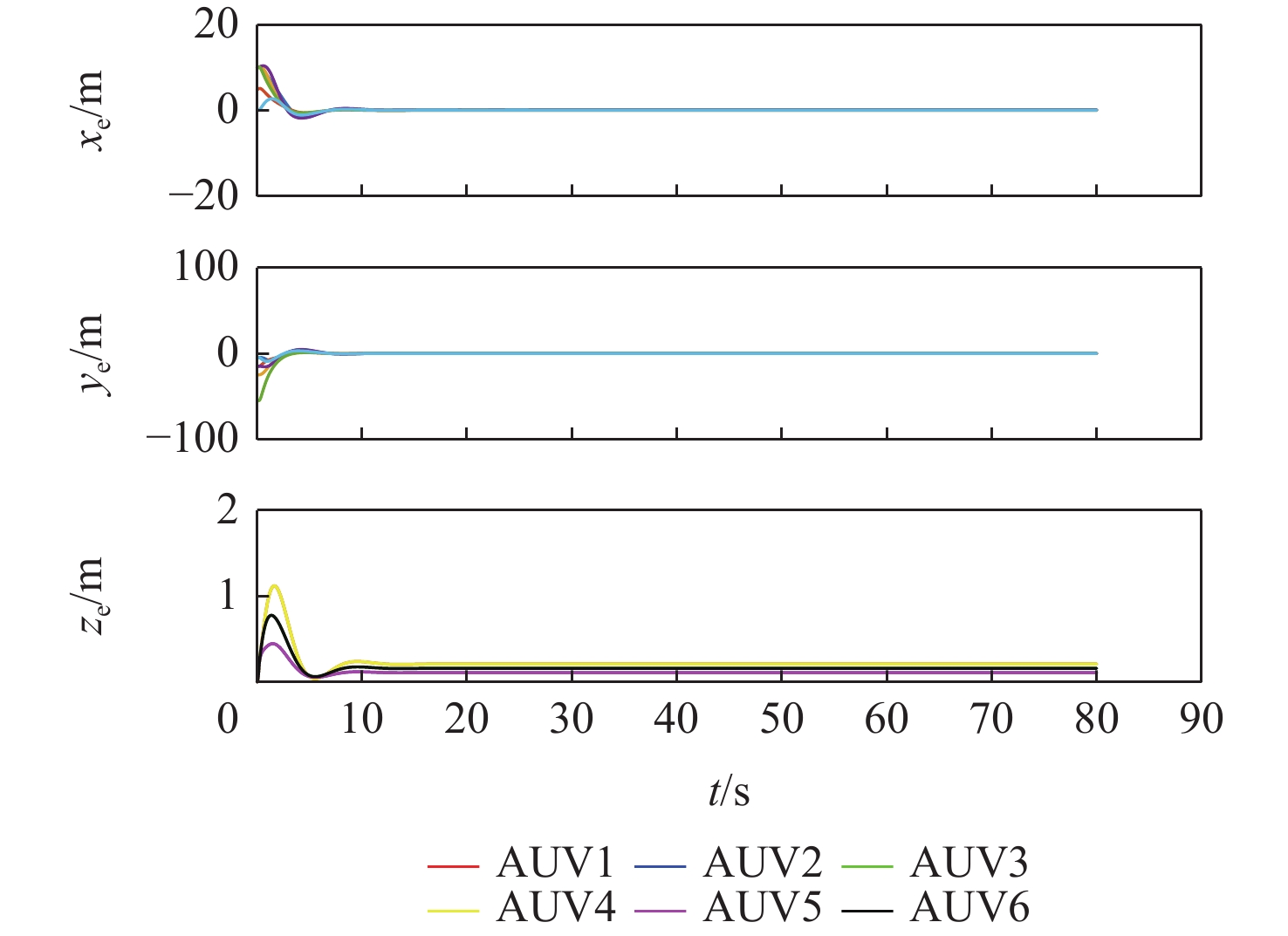
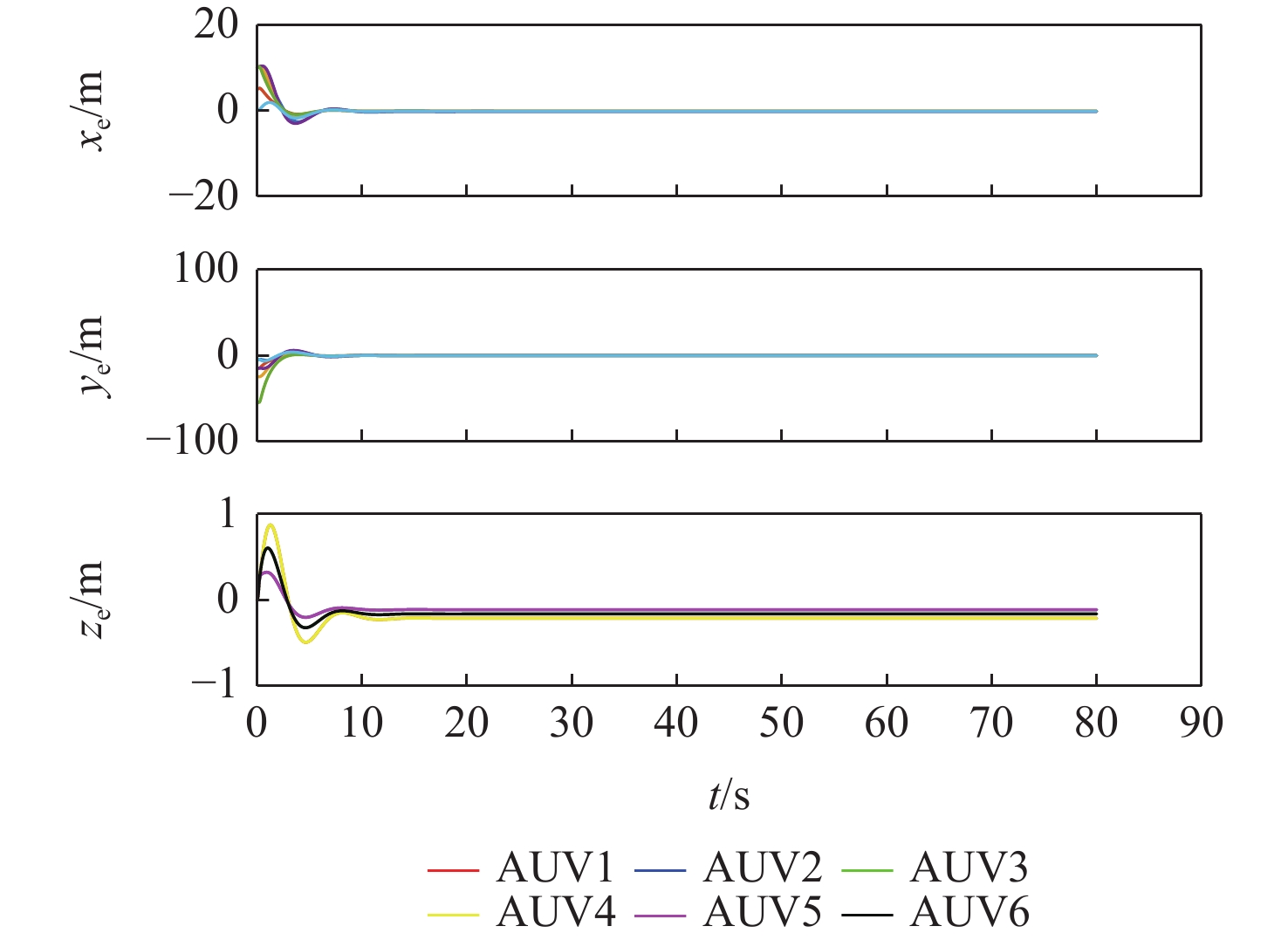
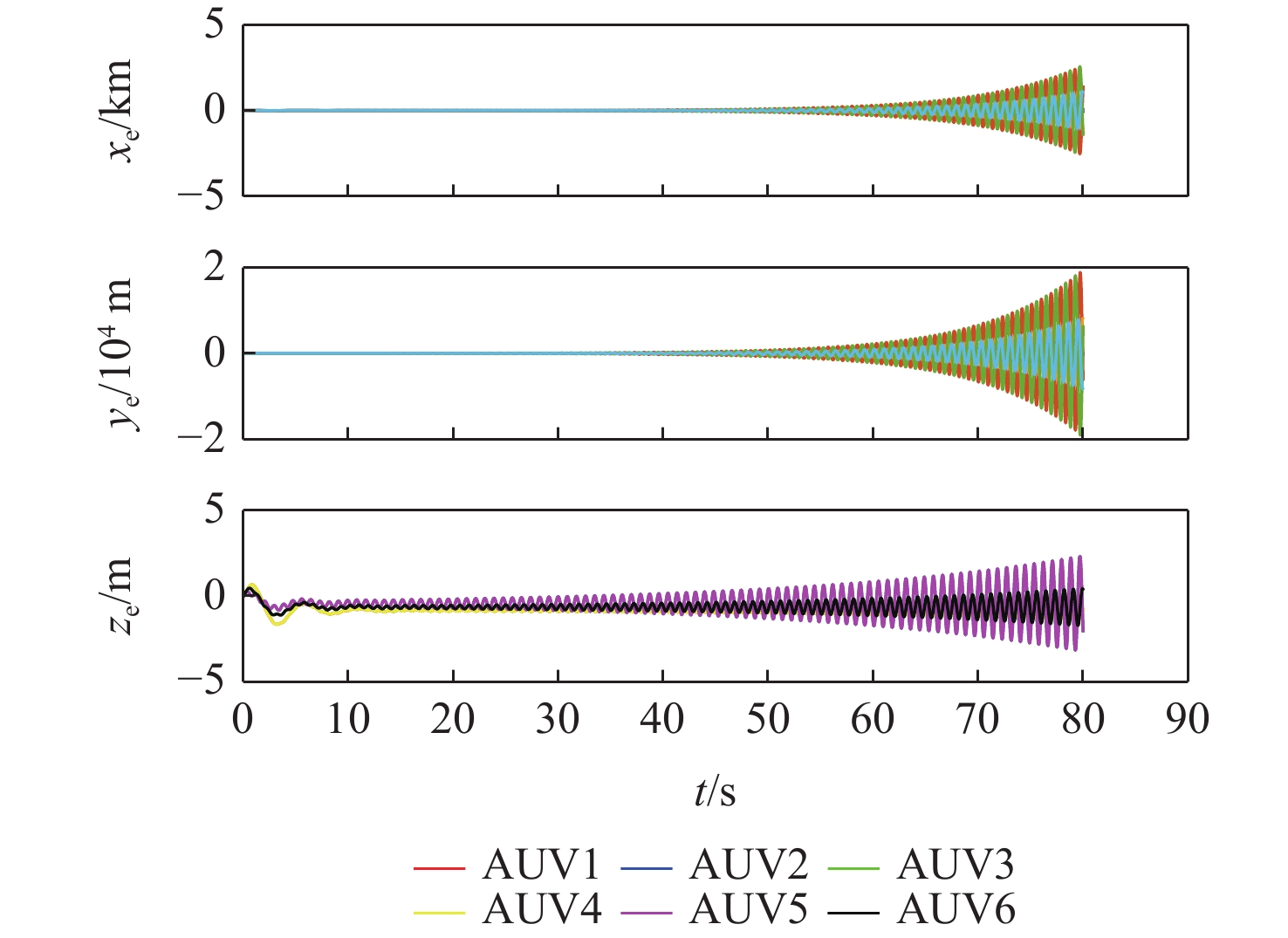
图 5 通信时延为10 s下的AUV位置误差
Figure 5. AUV position error with a communication delay of 10 s
-
[1] 陶伟, 张晓霜. 国外水下无人集群应用及关键技术研究[J]. 舰船电子工程, 2021, 41(2): 9-13.TAO W,ZHANG X S. Research on application and key technology of underwater unmanned cluster abroad[J]. Ship Electronic Engineering, 2021, 41(2): 9-13(in Chinese). [2] 徐欣. 基于多Agent理论的复杂社团网络牵制控制方法研究[D]. 芜湖: 安徽师范大学, 2017.XU X. Research on constrained control methods for complex community networks based on multi agent theory[D].Wuhu:Anhui Normal University, 2017(in Chinese). [3] 王磊. 复杂动态网络系统的同步控制研究[D]. 杭州: 浙江大学, 2010.WANG L. Synchronization control of complex dynamical network systems[D]. Hangzhou: Zhejiang University, 2010(in Chinese). [4] 徐吉. 基于牵制控制的复杂网络同步及其应用[D]. 南京: 南京邮电大学, 2014.XU J. The synchronization of complex networks and its application based on pinning control[D]. Nanjing:Nanjing University of Posts and Telecommunications, 2014(in Chinese). [5] ZHOU M Y, HE X S, FU Z Q, et al. Diffusion inspires selection of pinning nodes in pinning control[J]. Physica A:Statistical Mechanics and its Applications, 2016, 446: 120-168. doi: 10.1016/j.physa.2015.11.018 [6] WANG S Z, ZHANG Z Y, LIN C, et al. Fixed-time synchronization for complex-valued BAM neural networks with time varying delays via pinning control and adaptive pinning control [J]. Chaos, Solitons & Fractals, 2021, 153: 111583. [7] SUN S X, REN T, XU Y J. Pinning synchronization control for stochastic multi-layer networks with coupling disturbance[J]. ISA Transactions, 2022, 128: 450-459. doi: 10.1016/j.isatra.2021.10.016 [8] SONG Q, LIU F, CAO J D, et al. M-matrix strategies for pinning controlled leader-following consensus in multiagent systems with nonlinear dynamics[J]. IEEE Transactions on Cybernetics, 2013, 43(6): 1688-1697. doi: 10.1109/TSMCB.2012.2227723 [9] MENG Z, REN W, CAO Y, et al. Leaderless and leader-following consensus with communication and input delays under a directed network topology[J]. IEEE Transactions on Systems, Man, and Cybernetics: Part B, 2011, 41(1): 75-88. [10] CUI J, ZHAO L, YU J, et al. Neural network-based adaptive finite-time consensus tracking control for multiple autonomous underwater vehicles[J]. IEEE Access, 2019, 7: 33064-33074. doi: 10.1109/ACCESS.2019.2903833 [11] REN W, BEARD R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies[J]. IEEE Transactions on Automatic Control, 2005, 50(5): 655-661. doi: 10.1109/TAC.2005.846556 [12] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: Wiley, 2011. [13] YAN Z, YANG Z, YUE L, et al. Discrete-time coordinated control of leader-following multiple AUVs under switching topologies and communication delays[J]. Ocean Engineering, 2019, 172: 361-372. doi: 10.1016/j.oceaneng.2018.12.018 [14] ZHANG W, ZENG J, YAN Z, et al. Consensus control of multiple AUVs recovery system under switching topologies and time delays[J]. IEEE Access, 2019, 7: 119965-119980. doi: 10.1109/ACCESS.2019.2935104 [15] XU M, YANG P, SHU Q. Consistent sliding mode fault tolerant control for second order multi-agent systems[C]//Proceedings of the IEEE CSAA Guidance, Navigation and Control Conference. Piscataway: IEEE Press, 2018: 1-6. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 273
- HTML全文浏览量: 107
- PDF下载量: 20
- 被引次数: 0
