



-
摘要:
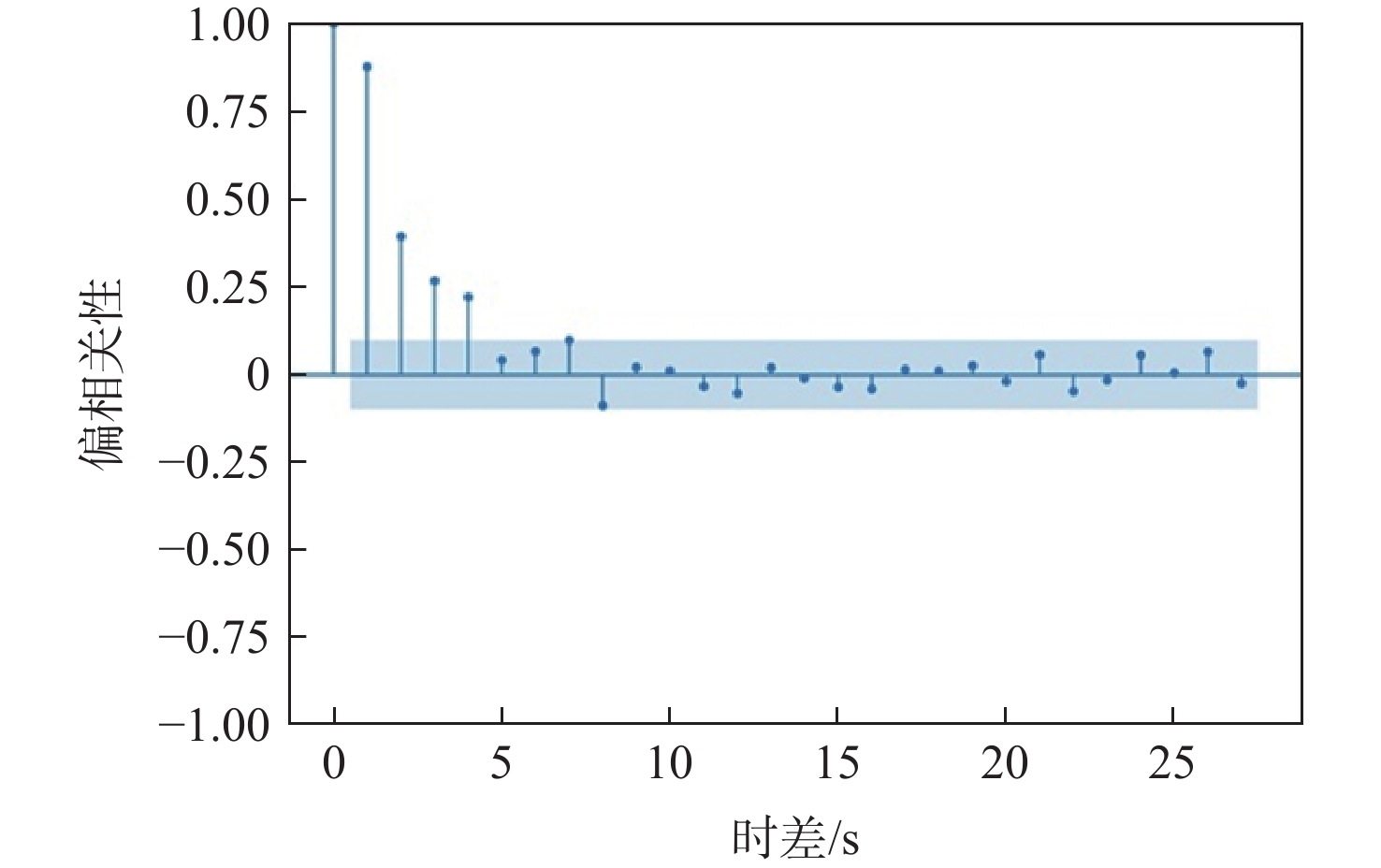
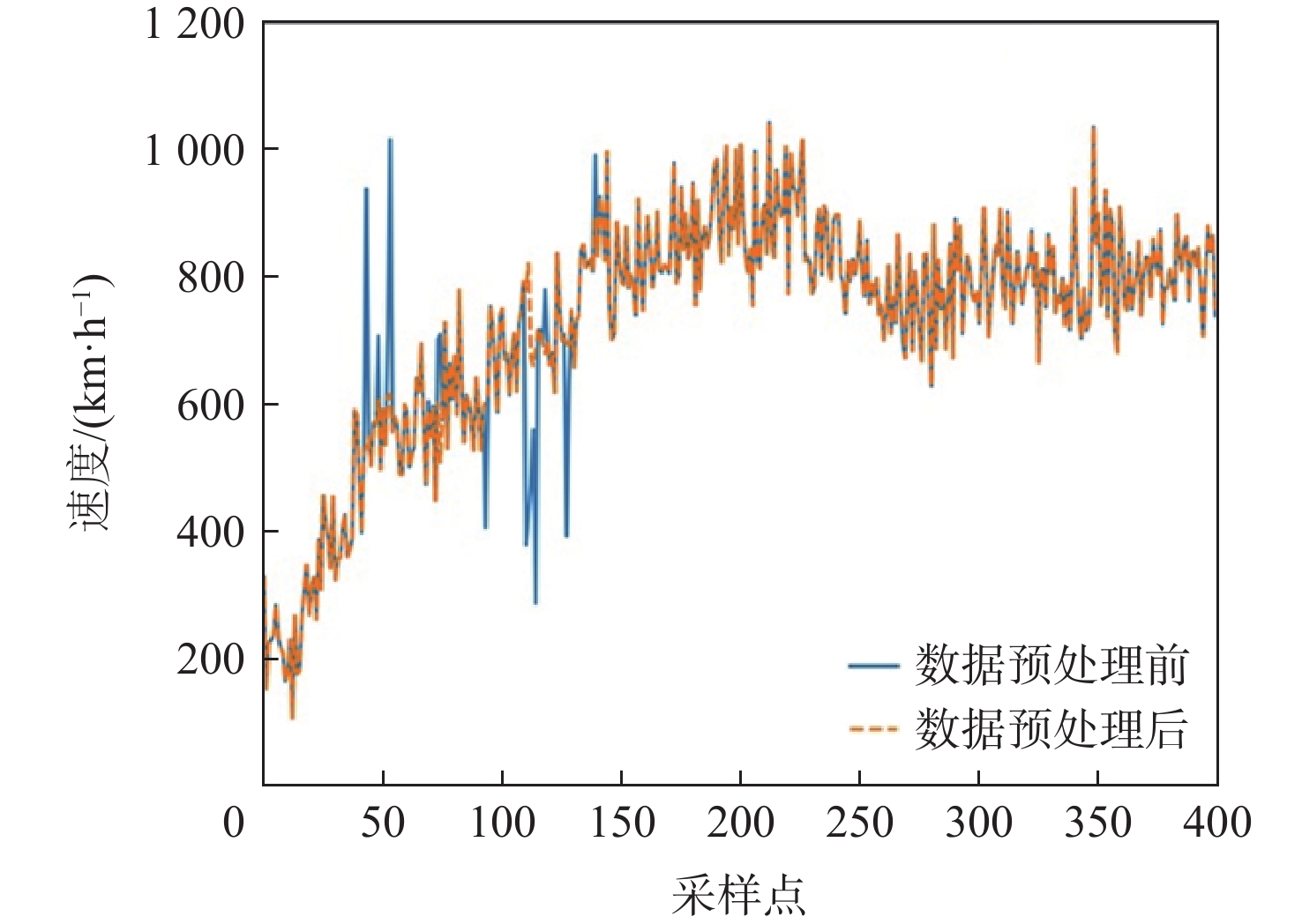
随着民航的快速发展,机场空域越发拥挤,迫切需要提高空域扇区规划的科学性。为解决传统方法指标单一、依赖人为经验因素的问题,提出了一种基于空中交通管制的雷达原始数据,采用轨迹信息数据挖掘算法确定空域扇区的方法。根据自回归模型和拉格朗日线性插值法处理航迹数据,建立特征点筛选模型,提取航向、速度、高度航迹特征点集,利用EM聚类得到特征点区域中心,基于特征点区域中心的分布建立拓扑关系,并建立最小成本函数的谱聚类算法优化模型,提出管制空域扇区方案。通过仿真验证了所提方案的可行性。
Abstract:With the rapid development of civil aviation, airport airspace has become more crowded. How airspace sector planning methods can be improved has become a key research question. The traditional method has the shortcomings of over-simplified indicators and relying on human experiences. This research offered a novel approach to identify airspace sectors using the trajectory information data mining technique based on raw radar data from ATC. Firstly, effective trajectory data were screened using an autoregressive model. Secondly, a feature point screening model was established to extract the heading, speed, and altitude trajectory feature point set. Through EM clustering, the center of the feature areas was determined, and the regional center of aircraft traffic was identified. The distribution of distinctive regional centers and conflict sites was then used to develop a topological relationship between the centers of the feature area points, and an optimization model based on the spectral clustering technique was created.Finally, the approach control airspace sector scheme is proposed, and simulation results verified the feasibility of the method.
-
Key words:
- time series /
- trajectory feature point /
- cluster analysis /
- vector autoregressive /
- airspace planning
-

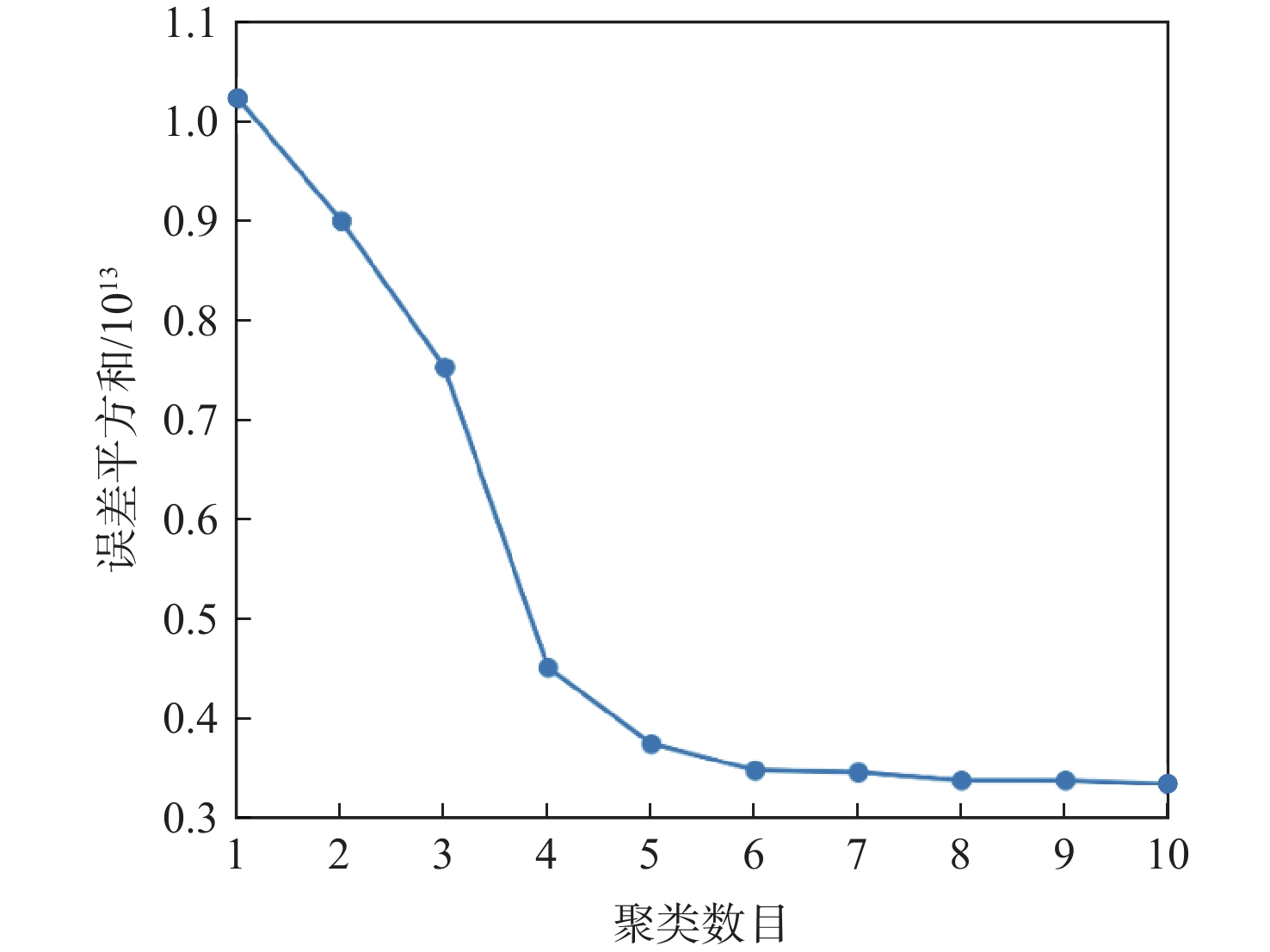
图 4 聚类数目与误差平方和的关系
Figure 4. Relationship between number of clusters and sum of error square

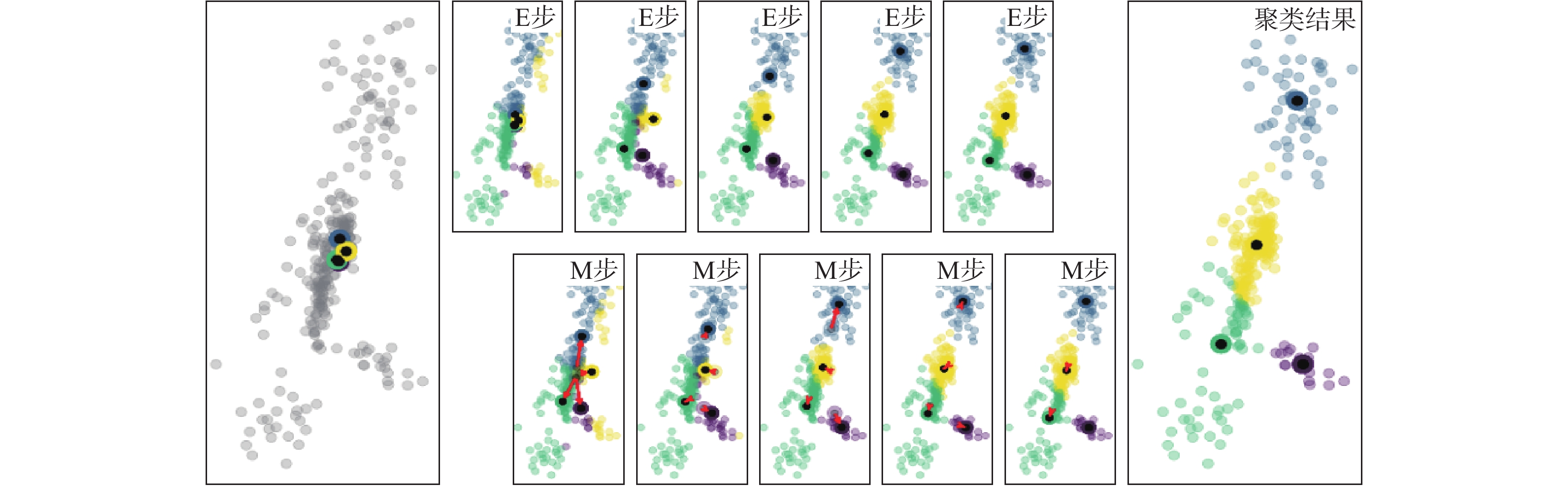
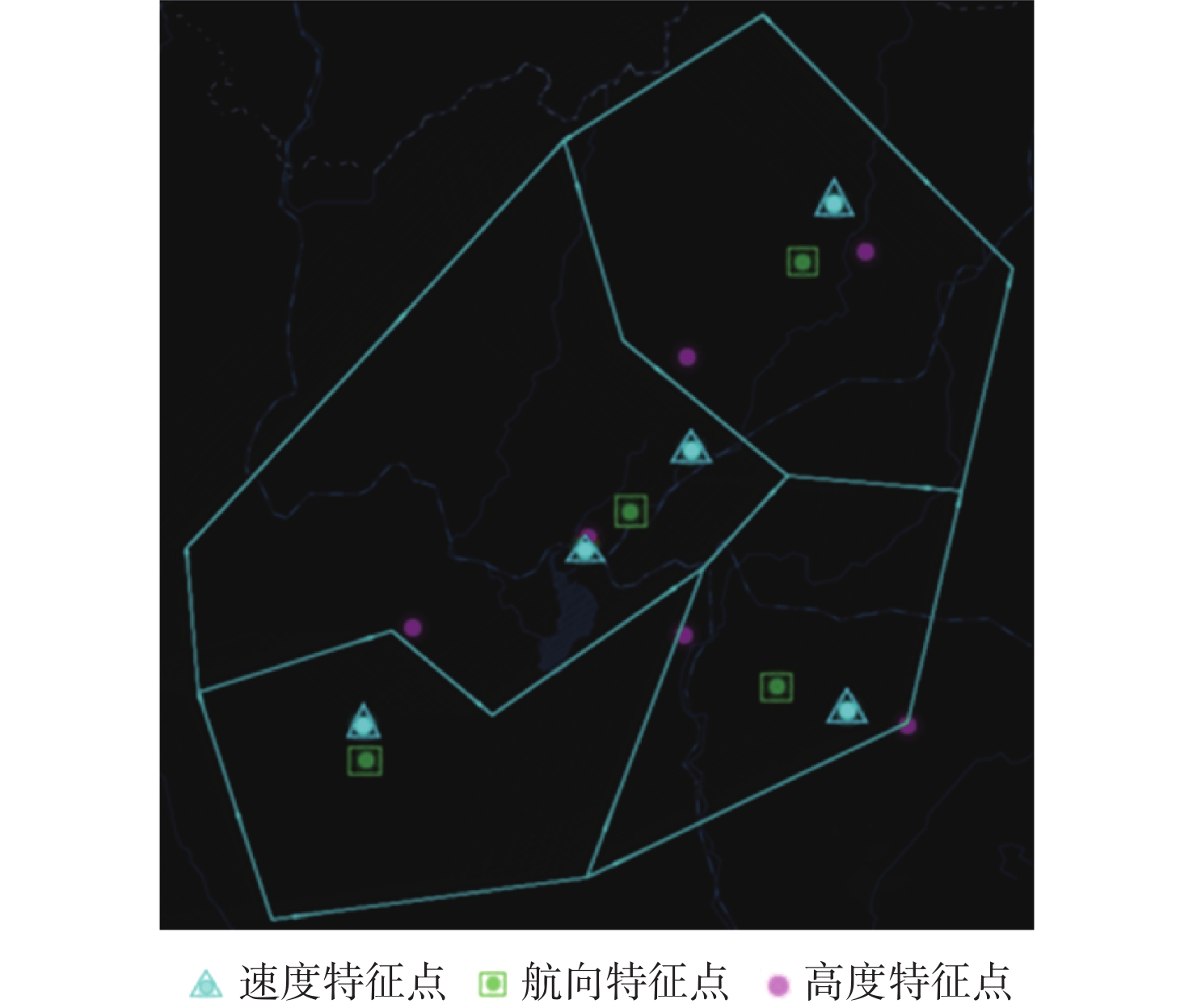
图 5 管制区航向特征点聚类过程及结果
Figure 5. Clustering process and results of heading feature points in control area
表 1 航向特征点集合
Table 1. A collection heading feature points
x/m y/m z/m 航空器速度/
(km·h−1)航向/
rad爬升率/
(m·min−1)238522 624896 5273 619 4.52 −6.02 162065 602388 2995 424 4.17 −2.01 160939 600783 2572 561 4.34 0  下载: 导出CSV
下载: 导出CSV
表 2 高度特征点集合
Table 2. A collection of height feature points
x/m y/m z/m 航空器速度/
(km·h−1)航向/
rad爬升率/
(m·min−1)−16363 1216 4651 507 0.14 −8.06 −7753 20643 4102 423 0.49 −8.09 16287 20217 3188 363 3.89 −8.03
下载: 导出CSV
表 3 速度特征点集合
Table 3. A collection of speed feature points
x/m y/m z/m 航空器速度/
(km·h−1)航向/
rad爬升率/
(m·min−1)135475 604256 6797 458 2.57 1.74 164551 560568 5098 776 2.60 0 164154 512549 4511 526 3.205 0
下载: 导出CSV
表 4 特征中心点坐标
Table 4. Coordinates of feature center point
类别 坐标/(°) 航向特征点 E102.9,N25.1 航向特征点 E103.4, N25.8 航向特征点 E102.1, N24.4 航向特征点 E103.3, N24.6 速度特征点 E102.8, N25.0 速度特征点 E103.1, N25.3 速度特征点 E102.1, N24.5 速度特征点 E103.5, N25.9 速度特征点 E103.6, N24.6 高度特征点 E102.8, N24.9 高度特征点 E103.6, N25.5 高度特征点 E103.7, N24.5 高度特征点 E103.1, N25.6 高度特征点 E102.2, N24.8 高度特征点 E103.2, N24.8
下载: 导出CSV
表 5 节点复杂度和位置
Table 5. Node complexity and location
节点编号 横坐标/km 纵坐标/km 复杂度 类别 1 −4.64 3.19 40 航向特征点 2 4.73 8 23 航向特征点 3 −8.76 −6.61 56 航向特征点 4 3.9 −5.12 19 航向特征点 5 −1.88 −9.01 26 速度特征点 6 136 2.2 24 速度特征点 7 −8.85 −6.24 45 速度特征点 8 5.71 9.92 47 速度特征点 9 6.27 −5.80 16 速度特征点 10 −1.77 −4.68 23 高度特征点 11 6.93 8.3 15 高度特征点 12 8.5 −6.24 24 高度特征点 13 1.23 4.90 30 高度特征点 14 −7.32 −3.35 41 高度特征点 15 1.09 −3.61 32 高度特征点 16 8 1.03 40 冲突点 注:以昆明长水国际机场跑道口中心点为基准建立直角坐标系。
下载: 导出CSV
表 6 拓扑关系
Table 6. Topological relationship
节点编号 邻接矩阵元素值 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 1 0 0 0 0 0 0.4 0.02 0.02 0.04 0.49 0.02 0.02 0.15 0.07 0.20 0.05 2 0 0 0 0 0 0.1 0.01 0.41 0.08 0.02 0.42 0.06 0.2 0.03 0.02 0.07 3 0 0 0 0 0 0.01 0.78 0.01 0.01 0.04 0.01 0.01 0.01 0.3 0.03 0.01 4 0 0 0 0 0 0.07 0.01 0.01 0.36 0.08 0.01 0.16 0.03 0.02 0.31 0.8 5 0 0 0 0 0 0.16 0.05 0.01 0.04 0.78 0.01 0.02 0.1 0.12 0.15 0.03 6 0.40 0.1 0.01 0.07 0.16 0 0 0 0 0.24 0.06 0.02 0.39 0.03 0.13 0.1 7 0.02 0.01 0.78 0.01 0.05 0 0 0 0 0.04 0.01 0.01 0.01 0.32 0.03 0.01 8 0.02 0.42 0.01 0.01 0.01 0 0 0 0 0.01 0.49 0.01 0.1 0.01 0.01 0.04 9 0.04 0.08 0.01 0.36 0.04 0 0 0 0 0.04 0.01 0.40 0.02 0.01 0.12 0.09 10 0.49 0.02 0.04 0.08 0.76 0.24 0.04 0.01 0.04 0 0 0 0 0 0 0.03 11 0.02 0.41 0.01 0.01 0.01 0.06 0.01 0.49 0.01 0 0 0 0 0 0 0.08 12 0.02 0.06 0.01 0.16 0.02 0.02 0.01 0.01 0.40 0 0 0 0 0 0 0.08 13 0.15 0.2 0.01 0.03 0.1 0.39 0.01 0.1 0.02 0 0 0 0 0 0 0.07 14 0.07 0.03 0.3 0.02 0.12 0.03 0.32 0.01 0.01 0 0 0 0 0 0 0.01 15 0.20 0.02 0.03 0.31 0.15 0.13 0.03 0.01 0.12 0 0 0 0 0 0 0.06 16 0.05 0.07 0.01 0.08 0.03 0.1 0.01 0.04 0.09 0.03 0.08 0.08 0.07 0.01 0.06 0
下载: 导出CSV
表 7 扇区划分结果工作负荷值
Table 7. Workload values based on sector division results
扇区 节点集合 扇区高峰流量/架次 扇区复杂度 西扇区 1,5,6,14 12 131 南扇区 3,7,10 20 124 东扇区 4,9,12,15 5 115 北扇区 2,8,11,13,16 14 131
下载: 导出CSV
-
[1] MITCHELL J, SABHNANI G, HOFFMAN R, et al. Dynamic airspace configuration management based on computational geometry techniques: AIAA 2008-7225[R]. Reston: AIAA, 2008. [2] KICINGER R, YOUSEFI A. Heuristic method for 3D airspace partitioning: Genetic algorithm and agent-based approach: AIAA 2009-7058[R]. Reston: AIAA, 2009. [3] LI J, WANG T, HWANG I. A spectral clustering based algorithm for dynamic airspace configuration: AIAA 2009-7056[R]. Reston: AIAA, 2009. [4] 亢继方. 空域复杂性因素下的扇区划分研究[D]. 南京: 南京航空航天大学, 2016.KANG J F. Research on sector division under airspace complexity factors[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016(in Chinese). [5] 毕虹. 基于空域信息的动态扇区划分方法研究[D]. 北京: 北京工业大学, 2013.BI H. Dynamic airspace sectorization via airspace information[D]. Beijing: Beijing University of Technology, 2013(in Chinese). [6] 尹文杰. 空域灵活使用中空域动态规划及流量动态分配技术研究[D]. 天津: 中国民航大学, 2014.YIN W J. Research on airspace dynamic programming and dynamic allocation of flow technique in the flexible use of airspace[D]. Tianjin: Civil Aviation University of China, 2014(in Chinese). [7] GERDES I, TEMME A, SCHULTZ M. Dynamic airspace sectorisation for flight-centric operations[J]. Transportation Research Part C:Emerging Technologies, 2018, 95: 460-480. doi: 10.1016/j.trc.2018.07.032 [8] 张文倩, 王瑛, 李超, 等. 飞行流量变化下的动态扇区划分研究[J]. 火力与指挥控制, 2019, 44(1): 125-130. doi: 10.3969/j.issn.1002-0640.2019.01.025ZHANG W Q, WANG Y, LI C, et al. Research on dynamic sector partitioningunder change of flight flow[J]. Fire Control & Command Control, 2019, 44(1): 125-130(in Chinese). doi: 10.3969/j.issn.1002-0640.2019.01.025 [9] REHM F. Clustering of flight tracks[C]//Proceedings of the AIAA Infotech @Aerospace Conference. Reston: AIAA, 2010: 155-164. [10] GARIEL M, SRIVASTAVA A N, FERON E. Trajectory clustering and an application to airspace monitoring[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1511-1524. doi: 10.1109/TITS.2011.2160628 [11] LEIDEN K, ATKINS S. Trajectory clustering for metroplex operations: AIAA 2011-7066[R]. Reston: AIAA, 2011. [12] 刘继新, 董欣放, 徐晨, 等. 基于密度峰值的终端区航迹聚类与异常识别[J]. 交通运输工程学报, 2021, 21(5): 214-226.LIU J X, DONG X F, XU C, et al. Aircraft trajectory clustering in terminal area and anomaly recognition based on density peak[J]. Traffic and Transportation Engineering, 2021, 21(5): 214-226(in Chinese). [13] 马天林, 韩壮志. 基于线性预测的雷达航迹压缩算法[J]. 火力与指挥控制, 2019, 44(8): 107-110.MA T L, HAN Z Z. Research on radar track compression algorithm based on linear prediction[J]. Fire Control & Command Control, 2019, 44(8): 107-110(in Chinese). [14] 王莉莉, 彭勃. 基于特征航迹简化模型的中心航迹提取研究[J]. 计算机应用研究, 2019, 36(1): 49-52.WANG L L, PENG B. Research on central flight track extraction based on simplified track model[J]. Application Research of Computers, 2019, 36(1): 49-52(in Chinese). [15] DONG X F, LIU J X, ZHANG W N, et al. Identifying anomaly aircraft trajectories in terminal areas based on deep auto-encoder and its application in trajectory clustering[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2020, 37(4): 574-585. [16] 郑乐, 隋东, 张军峰, 等. 基于转弯点聚类的航空器飞行轨迹分析[J]. 武汉理工大学学报(交通科学与工程版), 2015, 39(1): 139-143.ZHENG L, SUI D, ZHANG J F, et al. Analysis of the aircraft flight path based on turning points clustering[J] Journal of Wuhan University of Technology (Transportation Science & Engineering), 2015, 39(1): 139-143(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 390
- HTML全文浏览量: 101
- PDF下载量: 32
- 被引次数: 0
