



Tracking control of unmanned aerial vehicle swarms with leader-following double formation
-
摘要:
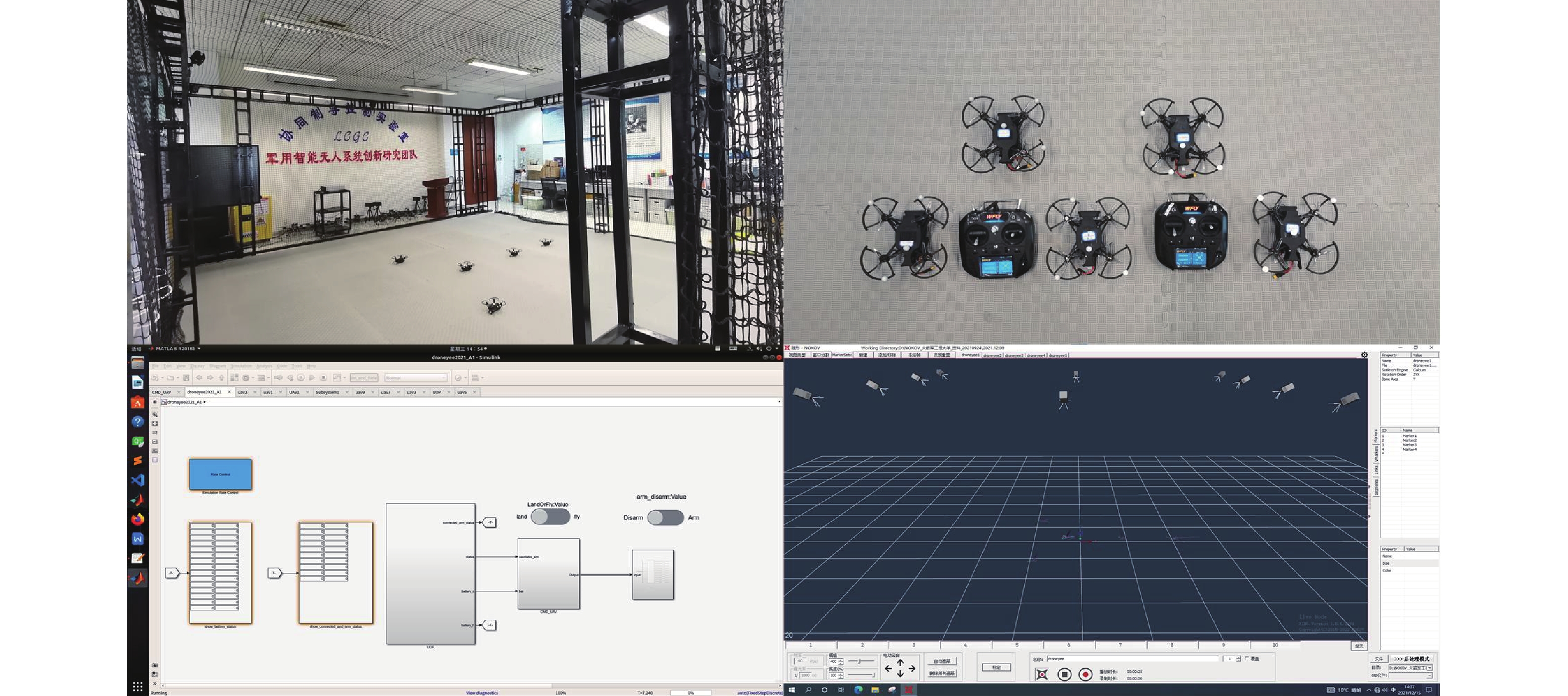
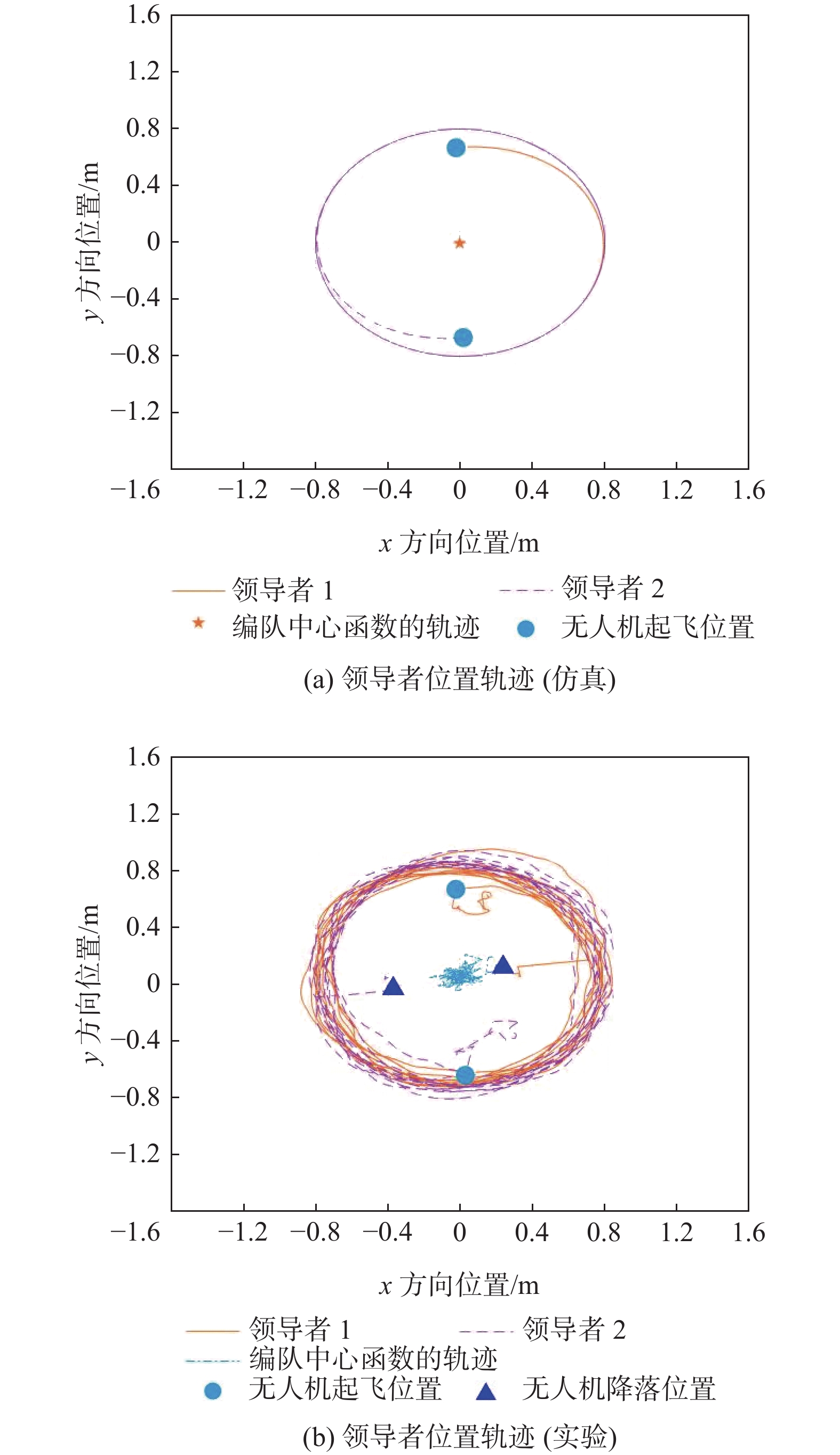
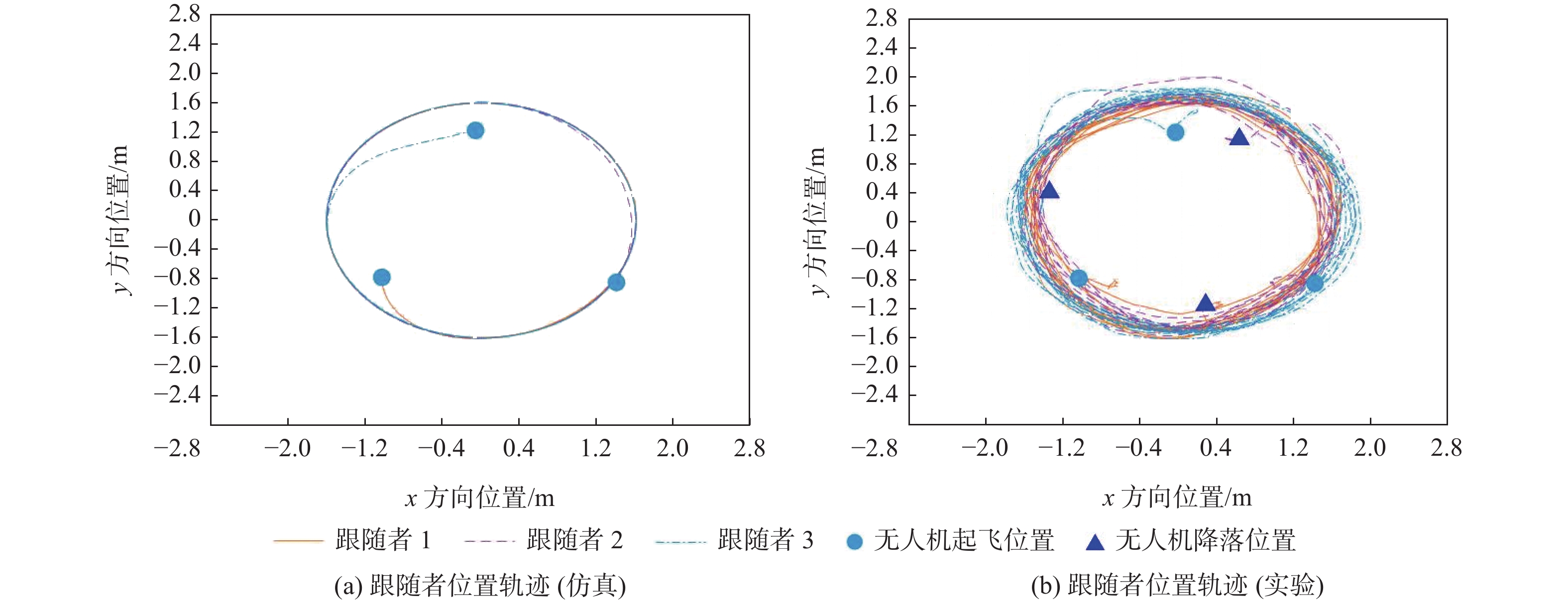
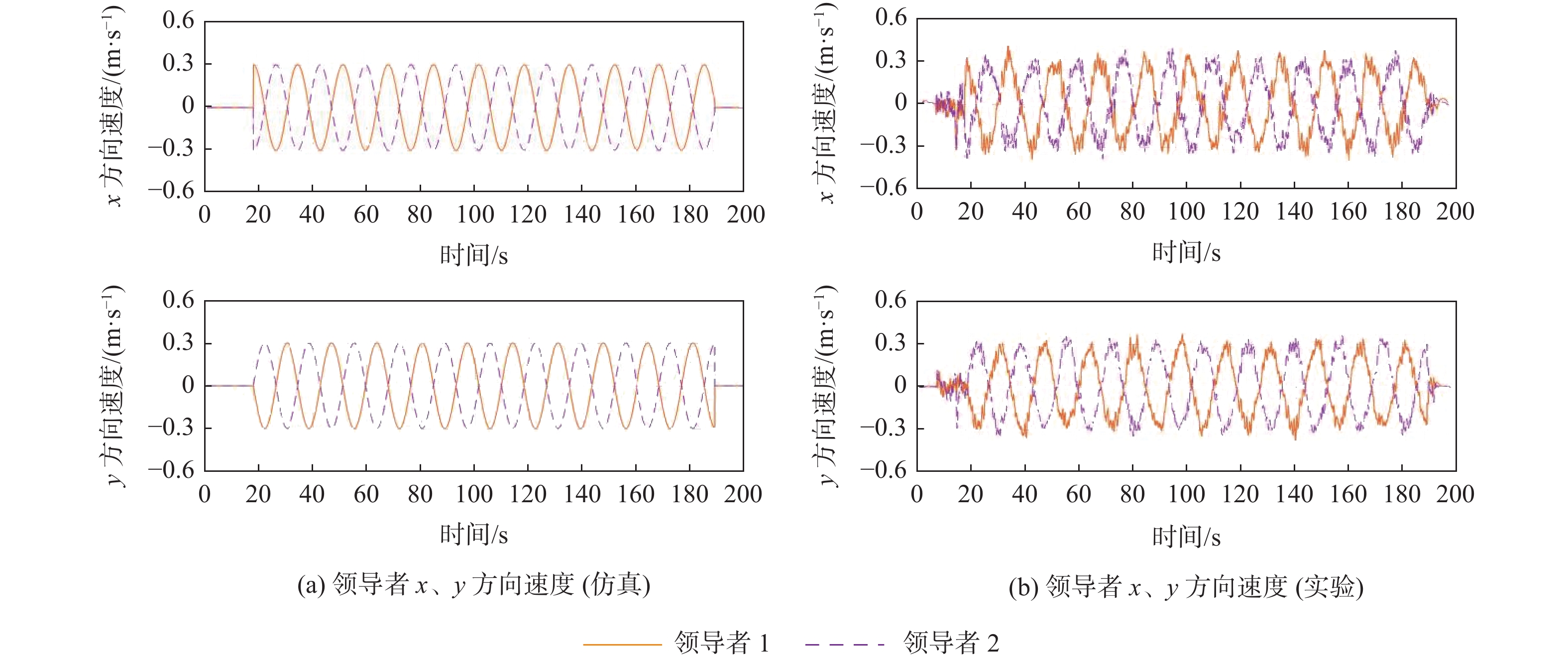
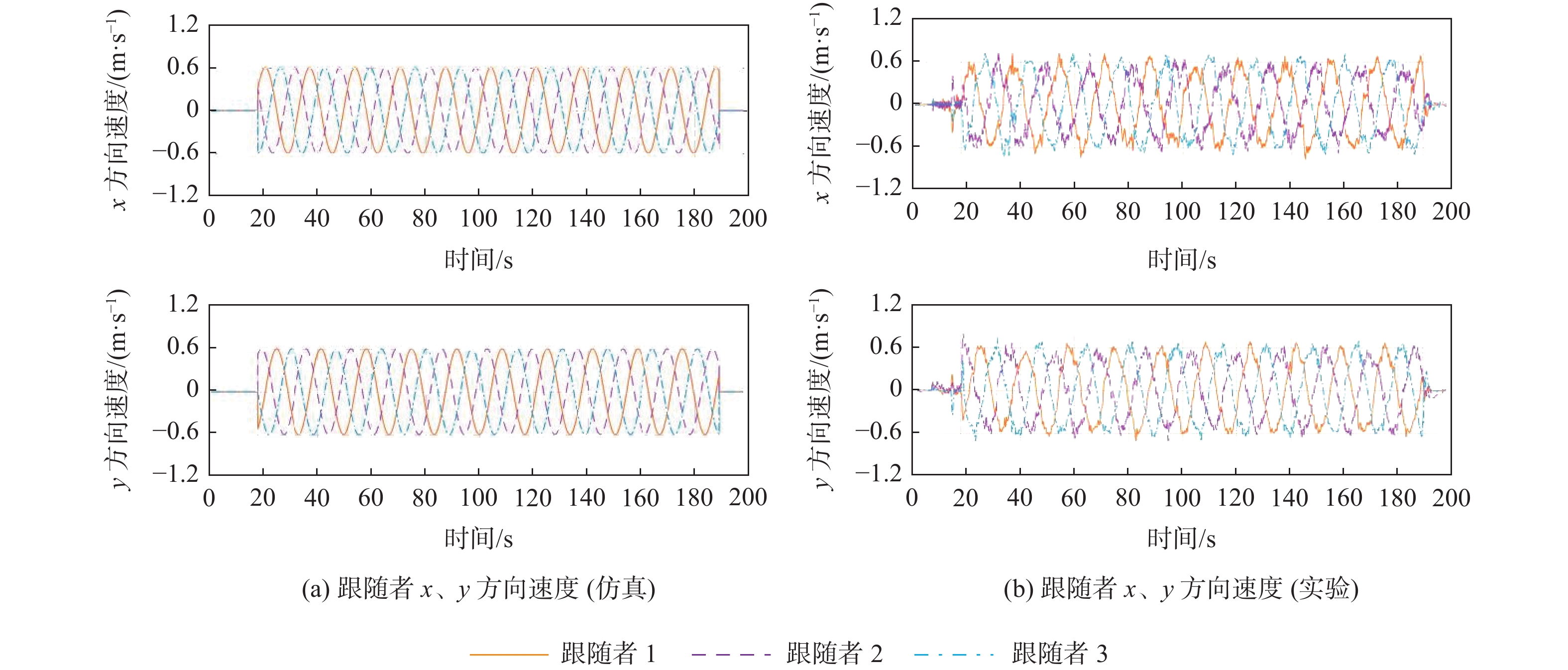
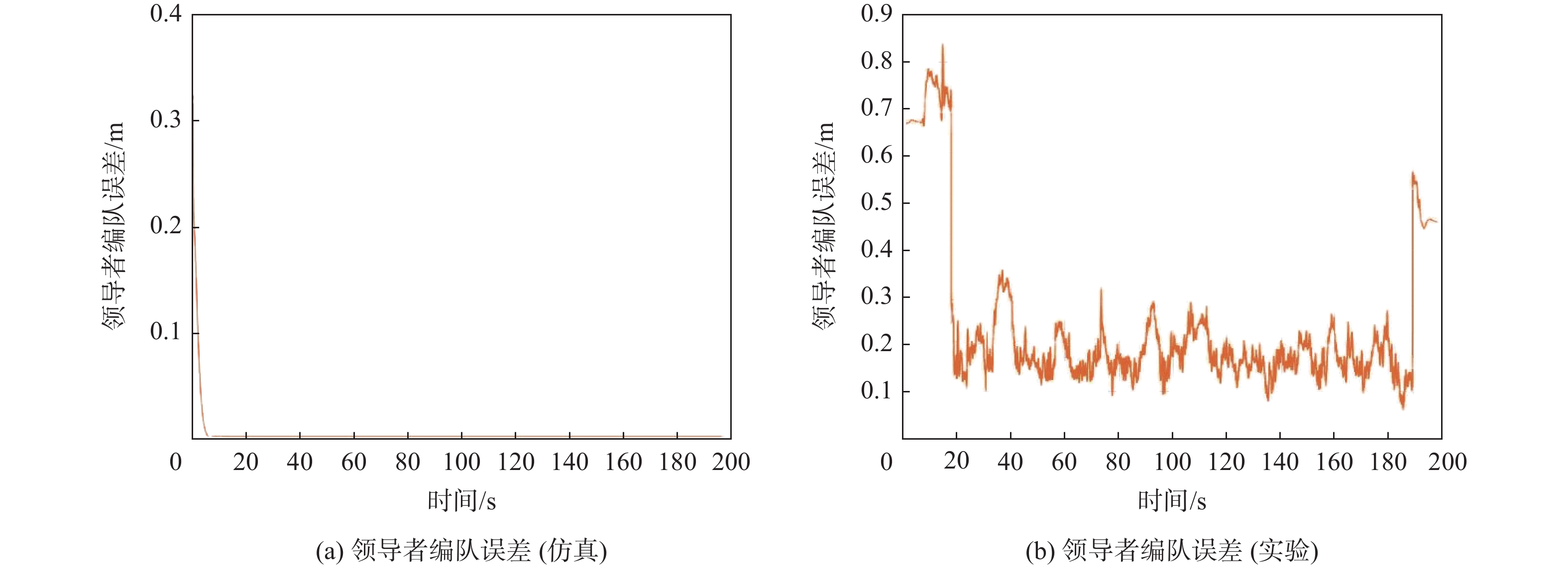
针对具有多个领导者的四旋翼无人机集群,提出领导-跟随双层结构时变编队跟踪控制分析与设计方法。利用无人机局部邻域信息,构造时变编队跟踪控制协议;基于领导-跟随双层编队通信拓扑结构,给出编队中心的显式表达式和编队跟踪的充分条件;通过构造并求解代数Riccati方程,提出一种领导-跟随双层结构编队跟踪控制协议的设计方法;利用四旋翼无人机集群飞行平台开展领导-跟随双层结构编队跟踪飞行实验。结果表明:所设计的领导-跟随双层结构编队跟踪控制协议可以驱使具有多个领导者的四旋翼无人机集群系统形成期望的领导-跟随双层编队结构,验证了所提方法的有效性。
-
关键词:
- 领导-跟随双层编队结构 /
- 时变编队控制 /
- 编队跟踪 /
- 四旋翼无人机 /
- 分布式
Abstract:In this paper, for a quadrotor unmanned aerial vehicle swarm with multiple leaders, a time-varying formation tracking control analysis and design method is proposed to realize the leader-following double formation structure. First, time-varying formation tracking protocols are constructed based on the neighboring information of UAVs. Next, using the leader-following double communication topology structure as a foundation, an explicit explanation of the formation center function and necessary requirements of formation tracking are suggested. Besides, a method to design the leader-following double structures formation tracking protocol is presented by solving an algebraic Riccati equation. Finally, the flight experiment of the leader-following double structure formation tracking was carried out by using the quadrotor UAV swarm flight platform. The experimental results validate the theoretical conclusions by demonstrating that the quadrotor UAV swarms system can be driven by the leader-following double structures formation tracking control protocol to build the necessary leader-following double formation structures.
-
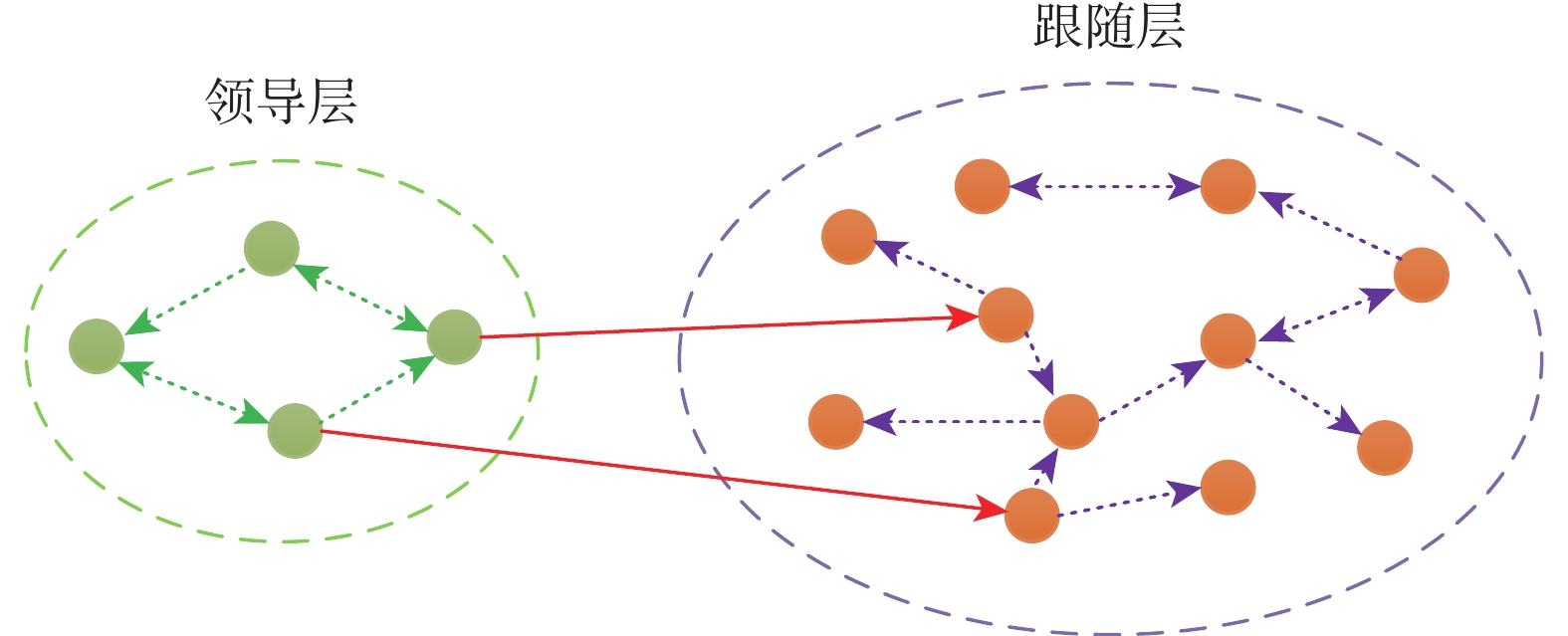
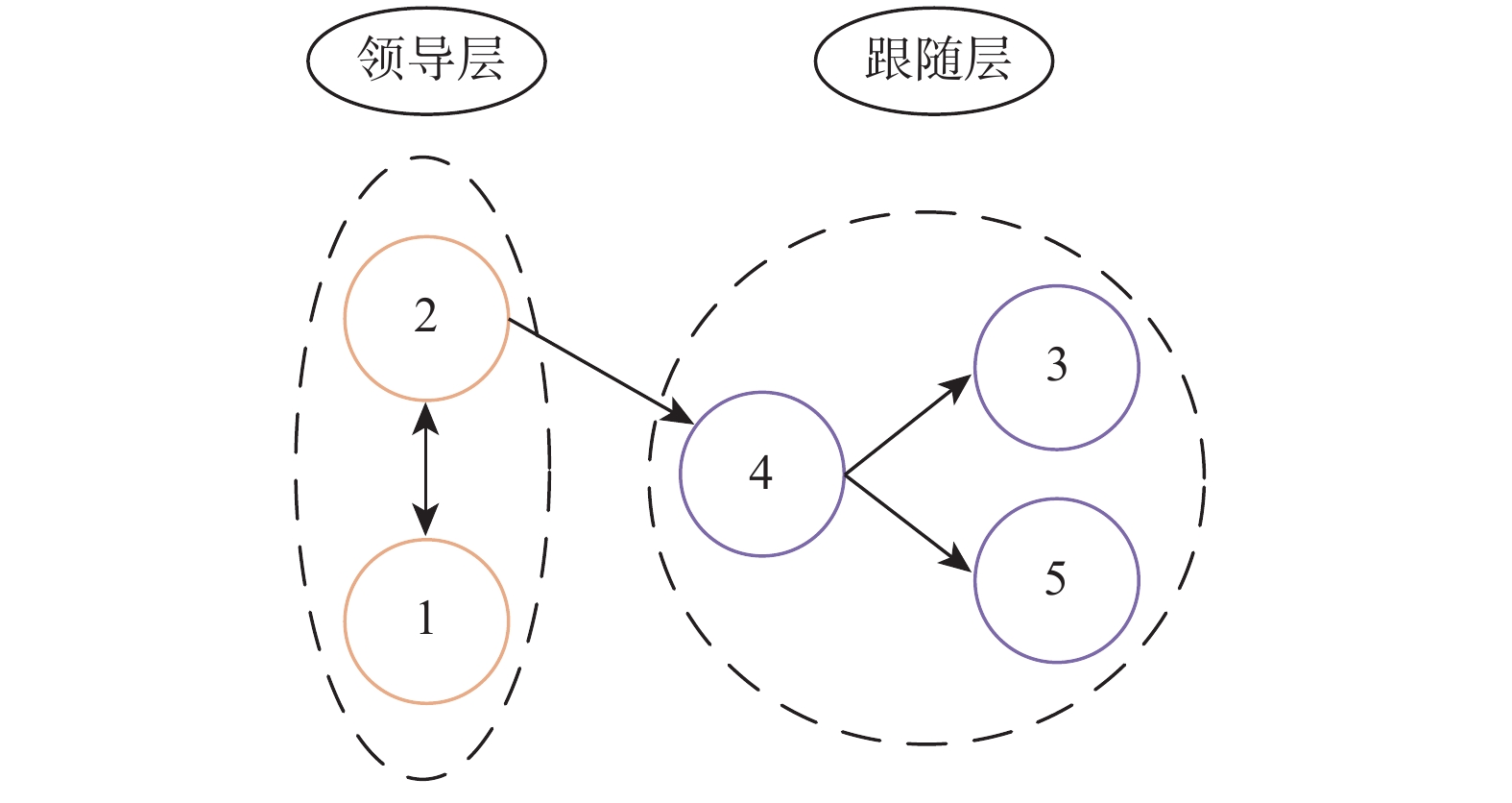
图 1 领导层和跟随层的节点关系
Figure 1. The nodes relationship schematic between the leadership layer and the following layer
-
[1] ZHANG D D, TANG Y, ZHANG W B, et al. Hierarchical design for position-based formation control of rotorcraft-like aerial vehicles[J]. IEEE Transactions on Control of Network Systems, 2020, 7(4): 1789-1800. doi: 10.1109/TCNS.2020.3000738 [2] HUANG Y, MENG Z Y. Bearing-based distributed formation control of multiple vertical take-off and landing UAVs[J]. IEEE Transactions on Control of Network Systems, 2021, 8(3): 1281-1292. doi: 10.1109/TCNS.2021.3061941 [3] 张世勇, 张雪波, 苑晶, 等. 旋翼无人机环境覆盖与探索规划方法综述[J]. 控制与决策, 2022, 37(3): 513-529.ZHANG S Y, ZHANG X B, YUAN J, et al. A survey on coverage and exploration path planning with multi-rotor micro aerial vehicles[J]. Control and Decision, 2022, 37(3): 513-529(in Chinese). [4] DUCARD G J J, ALLENSPACH M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs[J]. Aerospace Science and Technology, 2021, 118: 107035. doi: 10.1016/j.ast.2021.107035 [5] 石嘉, 裴忠才, 唐志勇, 等. 改进型自抗扰四旋翼无人机控制系统设计与实现[J]. 北京航空航天大学学报, 2021, 47(9): 1823-1831.SHI J, PEI Z C, TANG Z Y, et al. Design and realization of an improved active disturbance rejection quadrotor UAV control system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1823-1831(in Chinese). [6] XU Y, ZHEN Z. Multivariable adaptive distributed leader-follower flight control for multiple UAVs formation[J]. The Aeronautical Journal, 2017, 121(1241): 877-900. doi: 10.1017/aer.2017.42 [7] YU Z Q, ZHANG Y M, JIANG B, et al. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles[J]. Chinese Journal of Aeronautics, 2022, 35(1): 1-18. doi: 10.1016/j.cja.2021.04.022 [8] LI W X, CHEN Z Q, LIU Z X. Leader-following formation control for second-order multiagent systems with time-varying delay and nonlinear dynamics[J]. Nonlinear Dynamics, 2013, 72(4): 803-812. doi: 10.1007/s11071-013-0754-6 [9] 孟琭, 杨旭. 目标跟踪算法综述[J]. 自动化学报, 2019, 45(7): 1244-1260.MENG L, YANG X. A survey of object tracking algorithms[J]. Acta Automatica Sinica, 2019, 45(7): 1244-1260(in Chinese). [10] XIE D M, CHENG Y L. Consensus tracking control of multi-agent systems with an active virtual leader: time delay case[J]. IET Control Theory & Applications, 2014, 8(17): 1815-1823. [11] XIONG T Y, PU Z Q, YI J Q, et al. Fixed-time observer based adaptive neural network time-varying formation tracking control for multi-agent systems via minimal learning parameter approach[J]. IET Control Theory & Applications, 2020, 14(9): 1147-1157. [12] 姚辉, 席建祥, 王成, 等. 二阶多智能体系统自抗扰编队跟踪与避撞控制[J]. 北京航空航天大学学报, 2020, 46(5): 960-977.YAO H, XI J X, WANG C, et al. Active disturbance rejection based formation tracking and collision avoidance control for second-order multi-agent system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(5): 960-977(in Chinese). [13] DONG X W, ZHOU Y, REN Z, et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5014-5024. doi: 10.1109/TIE.2016.2593656 [14] YANG Y, SI X F, YUE D, et al. Time-varying formation tracking with prescribed performance for uncertain nonaffine nonlinear multiagent systems[J]. IEEE Transactions on Automation Science and Engineering, 2021, 18(4): 1778-1789. doi: 10.1109/TASE.2020.3019346 [15] DONG X W, TAN Q K, LI Q D, et al. Necessary and sufficient conditions for average formation tracking of second-order multi-agent systems with multiple leaders[J]. Journal of the Franklin Institute, 2017, 354(2): 611-626. doi: 10.1016/j.jfranklin.2016.10.030 [16] DONG X W, HU G Q. Time-varying formation tracking for linear multiagent systems with multiple leaders[J]. IEEE Transactions on Automatic Control, 2017, 62(7): 3658-3664. doi: 10.1109/TAC.2017.2673411 [17] HU J Y, BHOWMICK P, LANZON A. Distributed adaptive time-varying group formation tracking for multiagent systems with multiple leaders on directed graphs[J]. IEEE Transactions on Control of Network Systems, 2020, 7(1): 140-150. doi: 10.1109/TCNS.2019.2913619 [18] REN W, BEARD R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies[J]. IEEE Transactions on Automatic Control, 2005, 50(5): 655-661. doi: 10.1109/TAC.2005.846556 [19] MENG Z Y, REN W, YOU Z. Distributed finite-time attitude containment control for multiple rigid bodies[J]. Automatica, 2010, 46(12): 2092-2099. doi: 10.1016/j.automatica.2010.09.005 [20] BAYEZIT İ, FIDAN B. Distributed cohesive motion control of flight vehicle formations[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5763-5772. doi: 10.1109/TIE.2012.2235391 [21] WANG L, XI J X, HE M, et al. Robust time-varying formation design for multiagent systems with disturbances: extended-state-observer method[J]. International Journal of Robust and Nonlinear Control, 2020, 30(7): 2796-2808. doi: 10.1002/rnc.4941 [22] XI J X, WANG L, ZHENG J F, et al. Energy-constraint formation for multiagent systems with switching interaction topologies[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2020, 67(7): 2442-2454. doi: 10.1109/TCSI.2020.2975383 [23] ZAHREDDINE Z, ELSHEHAWEY E F. On the stability of a system of differential equations with complex coefficients[J]. Indian Journal of Pure & Applied Mathematics, 1988, 19(10): 963-972. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 509
- HTML全文浏览量: 159
- PDF下载量: 29
- 被引次数: 0
