



-
摘要:
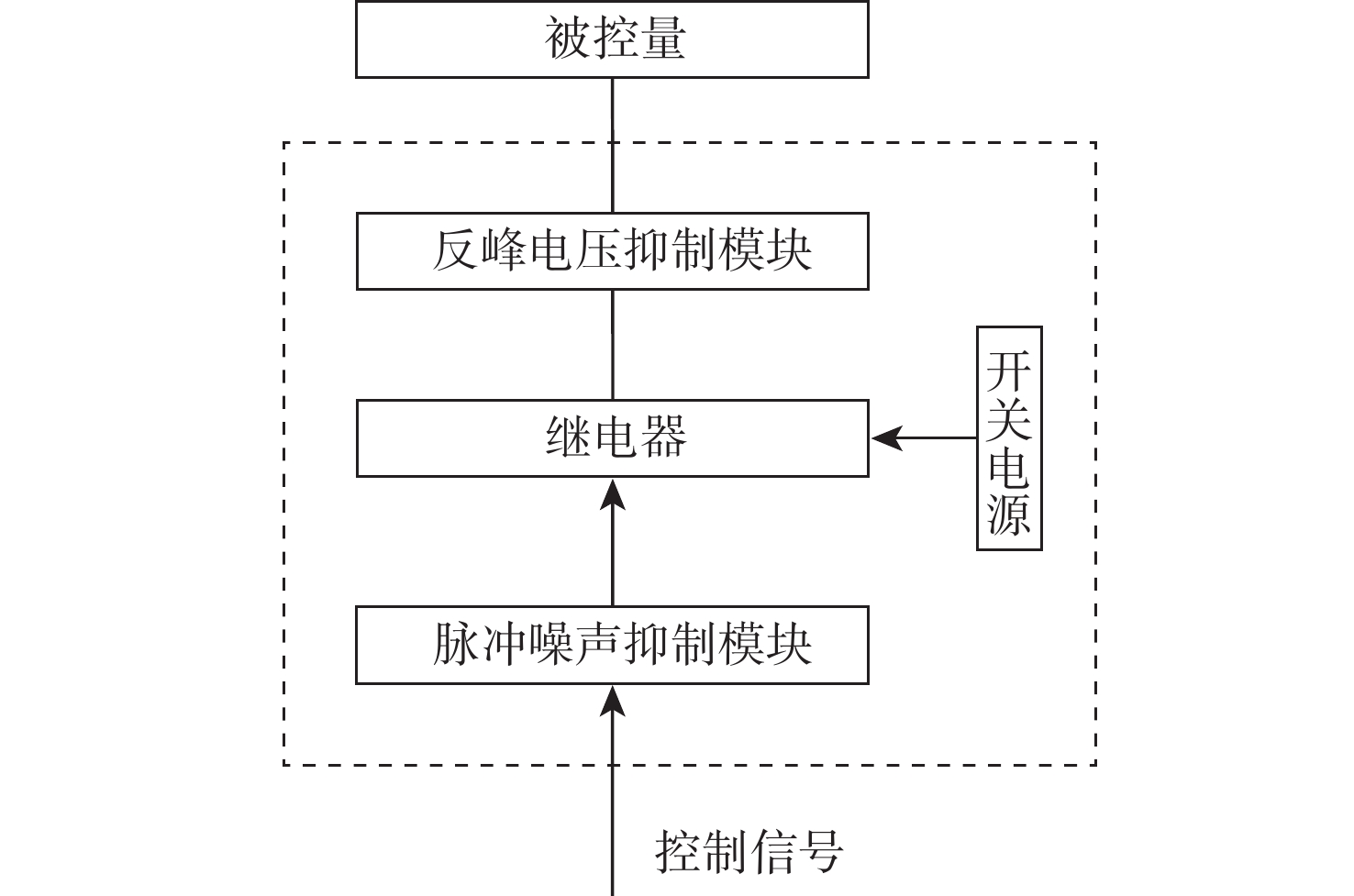
针对液体火箭发动机地面试验控制系统须抑制控制电路输入端的脉冲噪声、输出端的反峰电压及控制电流测量精度低等问题,运用放大电路原理,采用电路仿真方法,设计了基于电路印制板型固态继电器的控制驱动和控制电流测量电路。控制驱动电路应用“二极管+稳压二极管”模块以实现降低反峰电压和缩短复位时间的效果,控制驱动电路中固态继电器输出端集成了光耦隔离模块用于反馈控制信号,控制电流测量电路主要由霍尔效应电流感应模块和运算放大器构成以达到较高精度测量控制电流的目的。通过电路仿真,分析了控制驱动电路的反峰电压抑制模块、控制电流测量电路的动静态特性。仿真和实测结果表明:控制电流测量电路的基本误差为6.66%±1.80%,电路上升时间小于0.3 ms,下降时间小于0.5 ms;控制驱动电路的接通时间小于2 $ \text{μs} $,关断时间小于0.5 ms,“标准恢复二极管+齐纳二极管”方法能有效抑制反峰电压;控制驱动电路可应用于液体火箭发动机高精度的地面试验控制系统研制。
Abstract:Aiming at the problems that the liquid rocket engine ground test control system must suppress the pulse noise at the input end of the control circuit, the peak inverse voltage at the output end and the low measurement accuracy of the control current, a control drive and control current measurement circuit based on printed board solid state relay is designed through the application of circuit simulation and amplification circuit methods. The control drive circuit applied the "diode + zener diode" module to reduce the peak reverse voltage and speed up the reset time. An optocoupler isolation module is integrated at the output of solid state relay (SSR) of the control drive circuit to feed back the control signal. The Hall effect current sensing module and operational amplifier make up the majority of the control current measurement circuit, which is designed to provide high-precision control current measurement. The dynamic and static characteristics of the peak inverse voltage suppression module of the control drive circuit and the control current measurement circuit are simulated and analyzed. The simulation and measurement results show that the intrinsic error of the control current measurement circuit is 6.66%±1.80%, with a circuit rise time less than 0.3 ms and a fall time less than 0.5 ms. Control drive circuit can be used to construct high precision ground test control system of liquid rocket engine, with turn-on and turn-off time less than 2 μs and 0.5 ms, respectively. The control drive circuit can efficiently suppress peak inverse voltage with the help of a "standard recovery diode + zener diode" module.
-

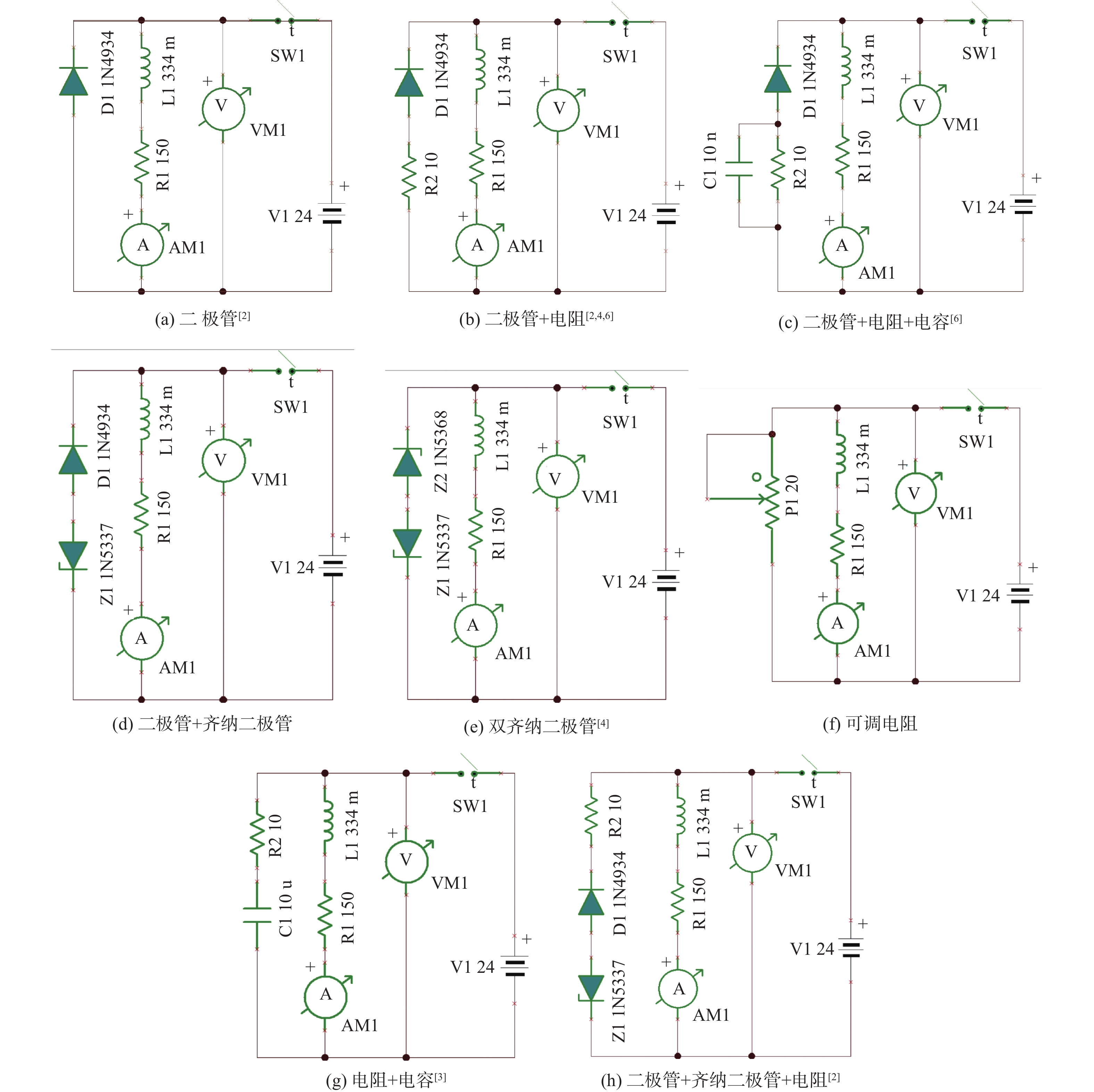
图 3 常见抑制反峰电压方法仿真电路原理
Figure 3. Simulation circuit schematic of common inverse peak voltage suppression methods

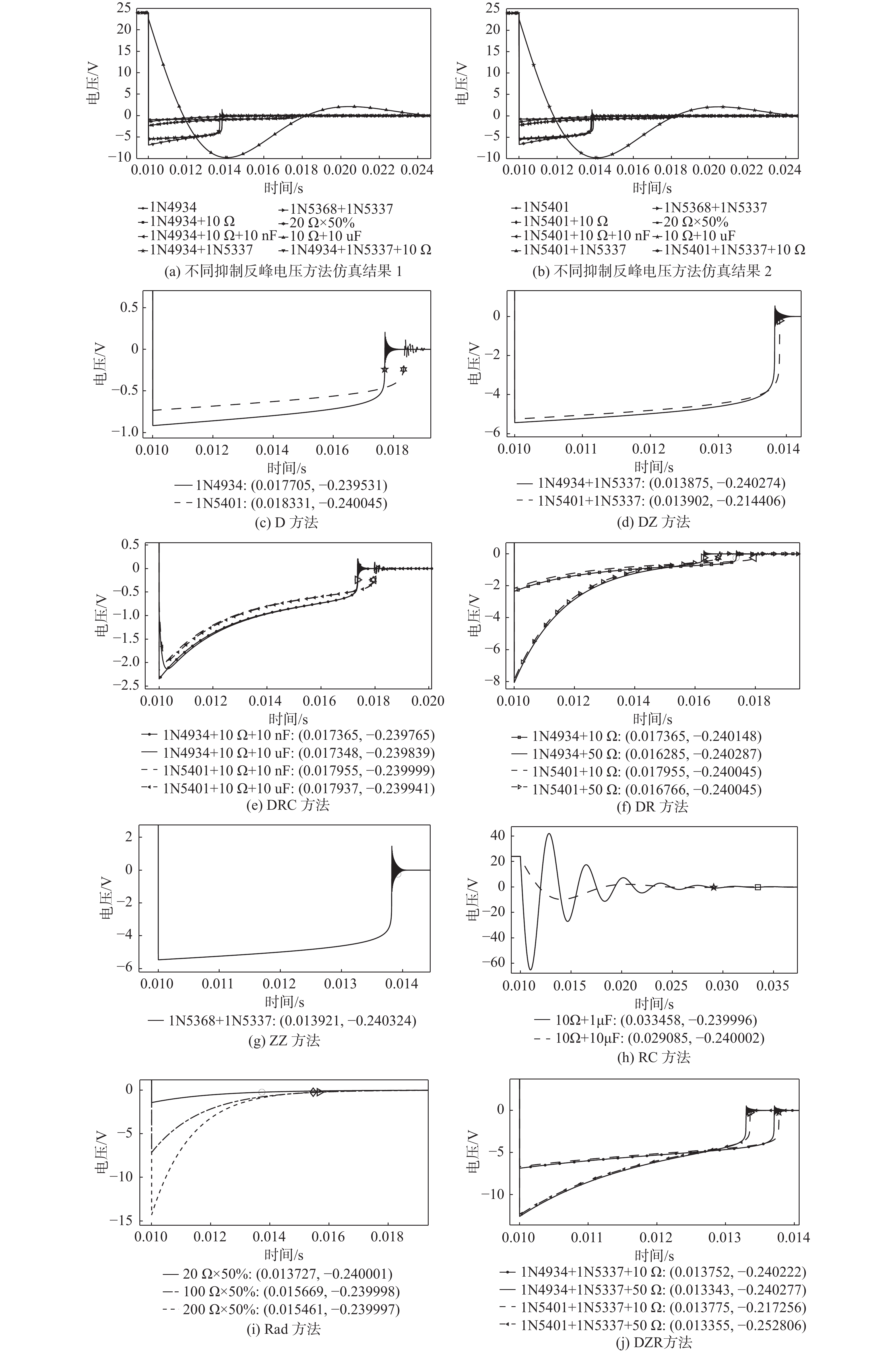
图 4 不同抑制反峰电压方法的仿真结果对比
Figure 4. Comparison of simulation results for different methods to suppress peak inverse voltage

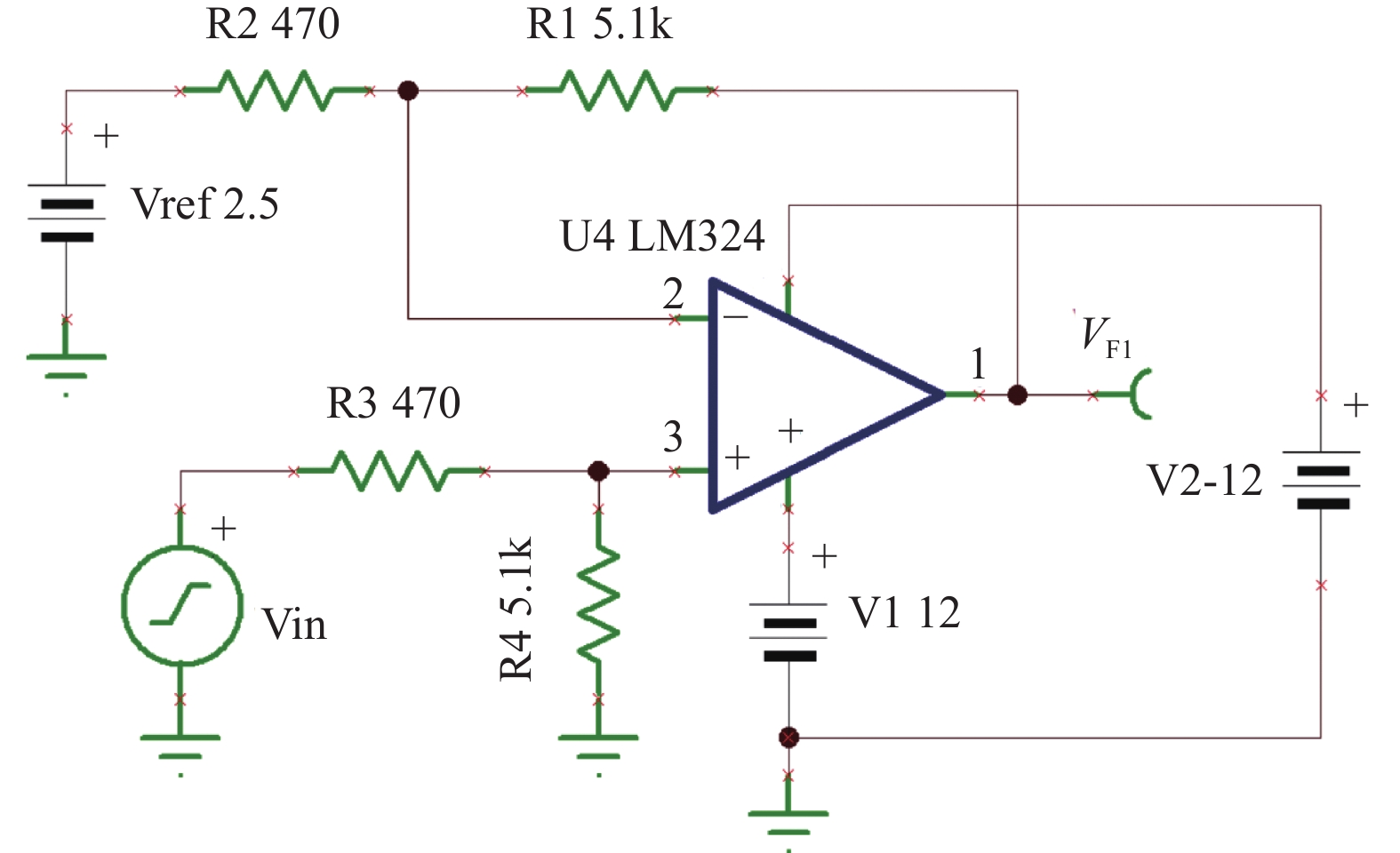
图 5 反相正基准电压同相放大电路原理
Figure 5. Non-inverting amplifier circuit schematic diagram with inverting positive reference voltage

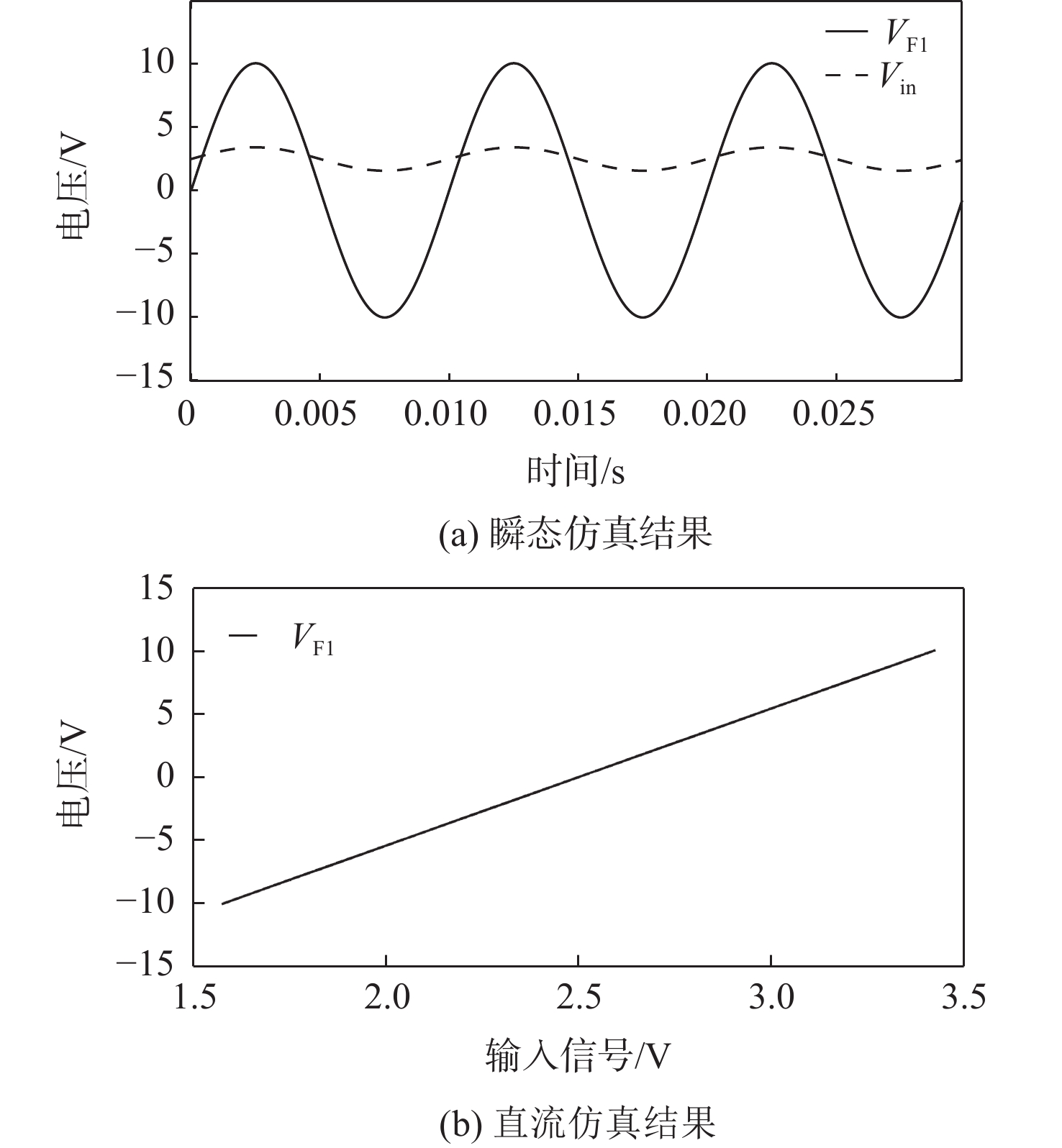
图 6 反相正基准电压同相放大电路仿真结果
Figure 6. Simulation results of non-inverting amplifier circuit with inverting positive reference voltage

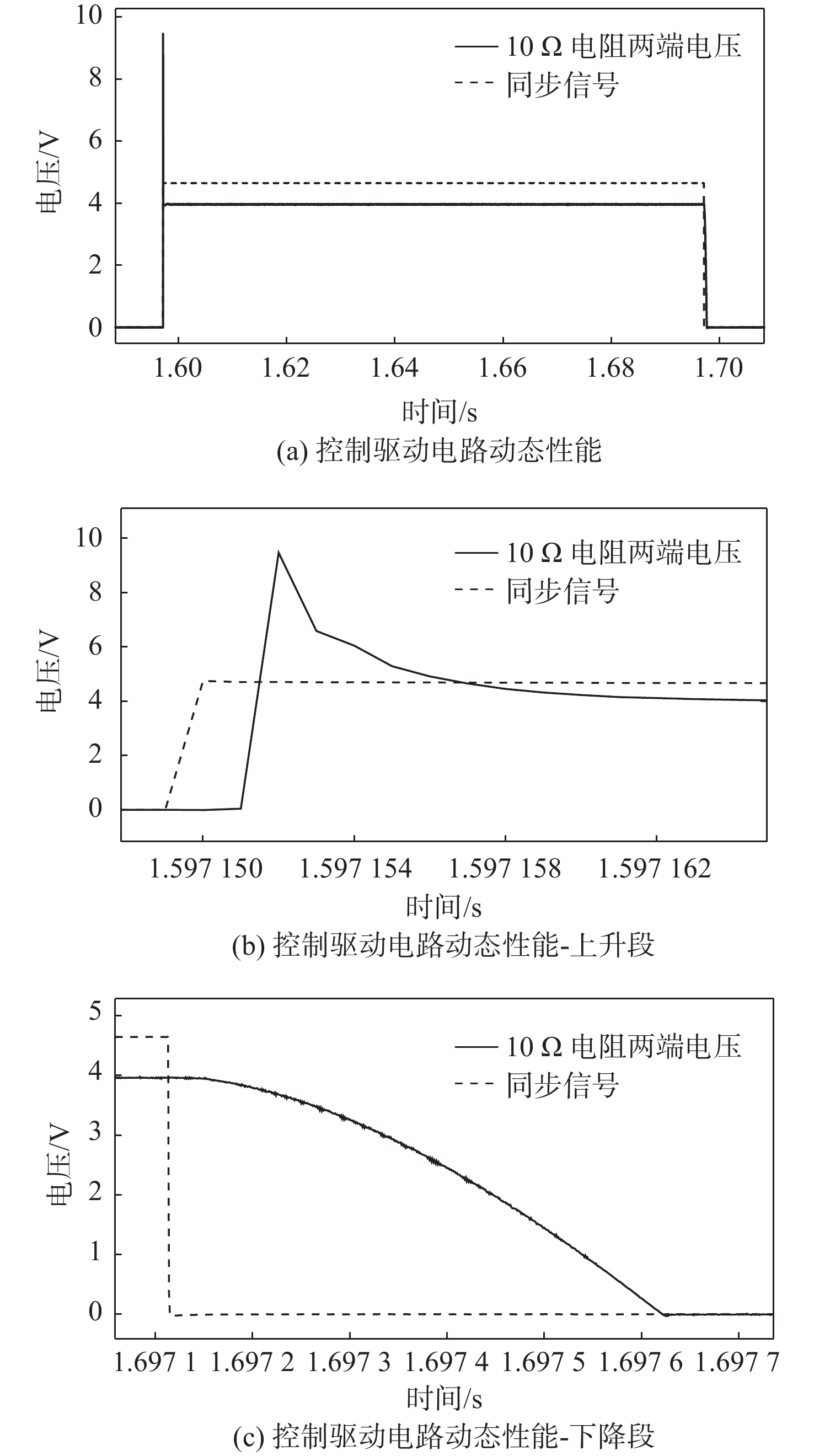
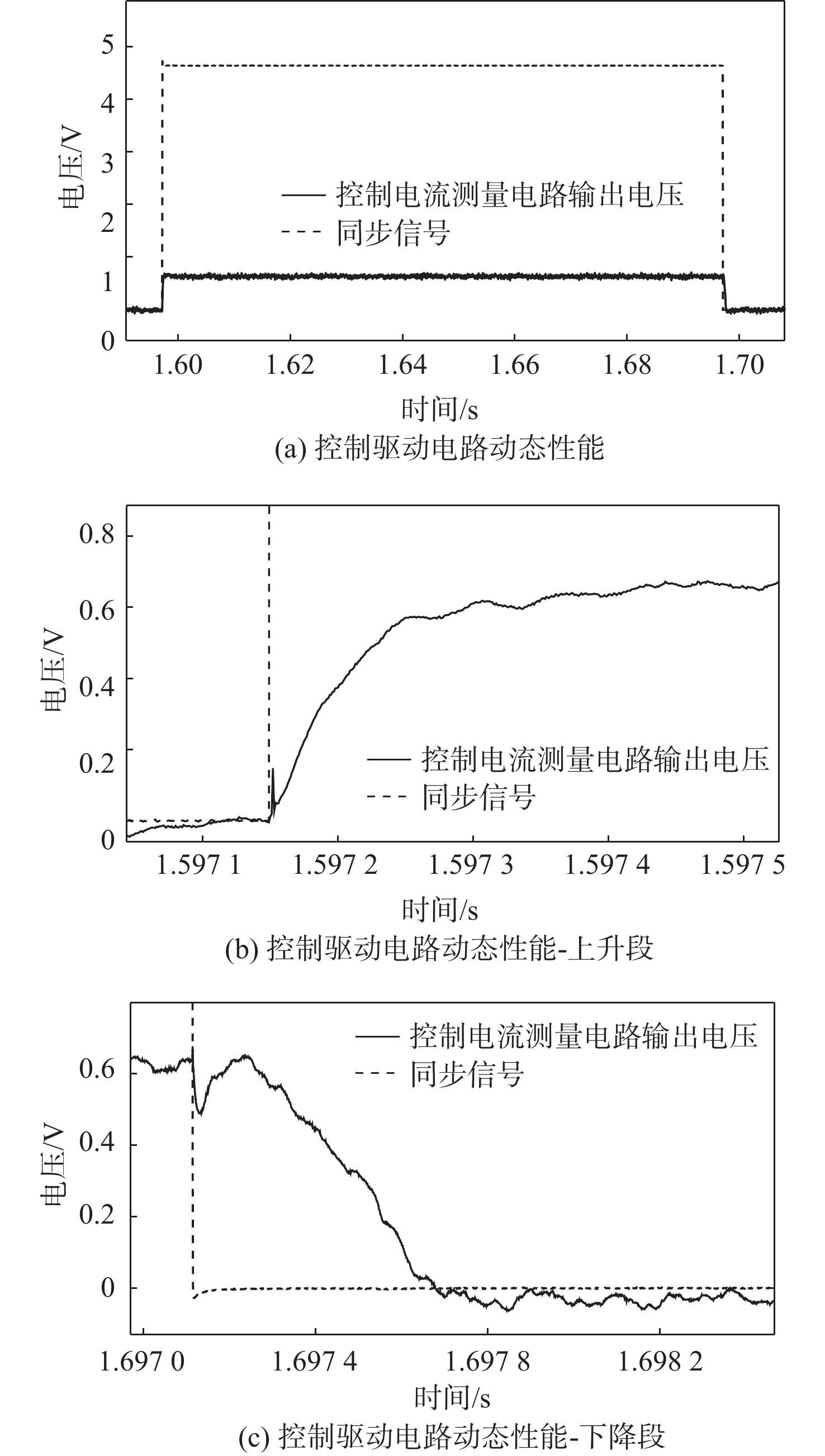
图 10 控制驱动电路的动态性能测试结果
Figure 10. Dynamic performance test results of control drive circuit

图 11 控制电流测量电路的动态性能测试结果
Figure 11. Dynamic performance test results of control current measurement circuit

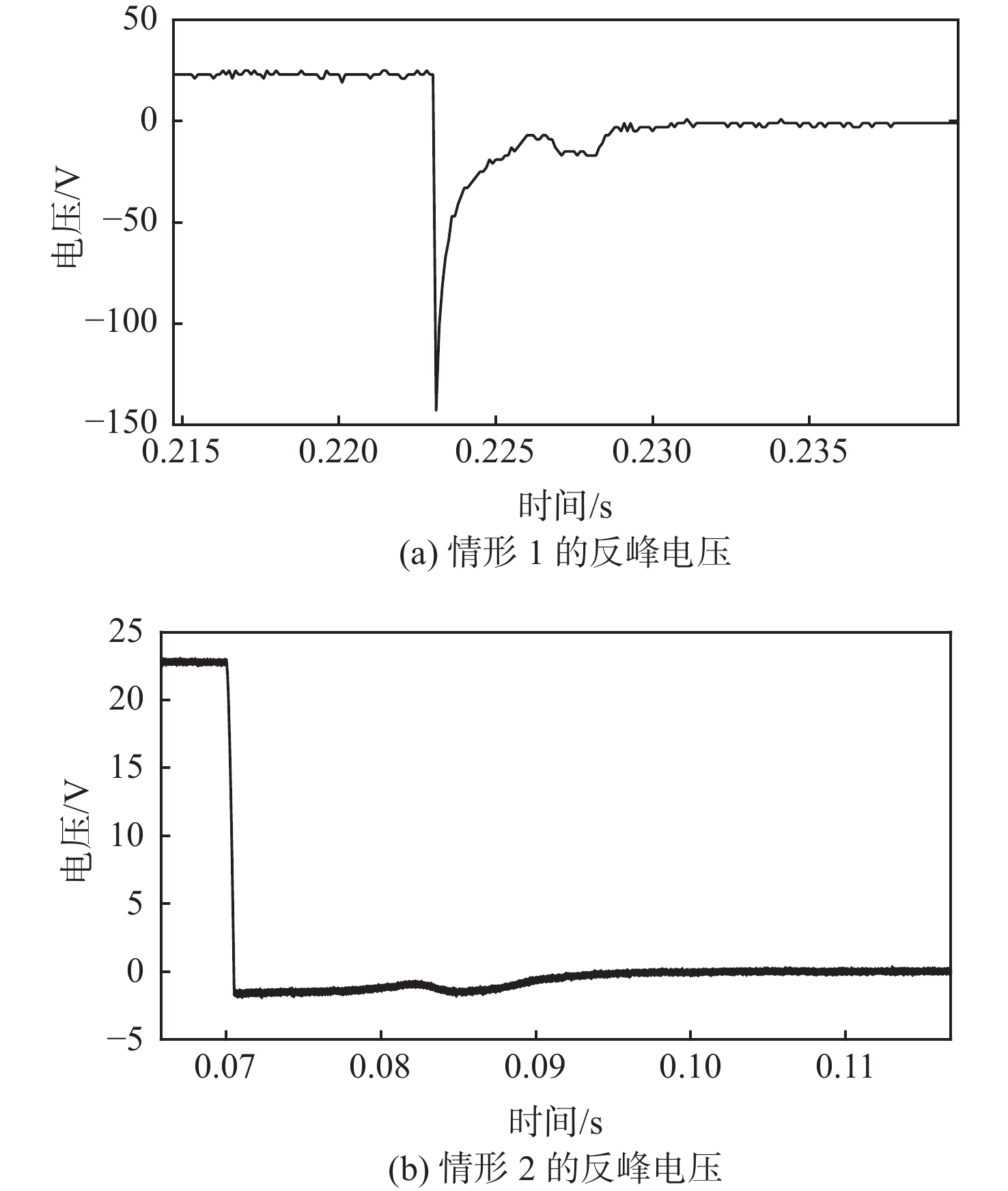
图 12 电磁阀关断瞬间的反峰电压
Figure 12. Peak inverse voltage at the turn-off moment of solenoid valve
表 1 不同抑制反峰电压方法仿真结果
Table 1. 1Simulation results of different inverse peak voltage suppression methods
方法 反峰电压峰值/V 复位时间/ms D 1N4934 0.92 7.705 1N5401 0.73 8.331 DR 1N4934+10 Ω 2.35 7.365 1N4934+50 Ω 8.06 6.285 1N5401+10 Ω 2.16 7.955 1N5401+50 Ω 7.88 6.766 DZ 1N4934+1N5337 5.43 3.875 1N5401+1N5337 5.25 3.902 ZZ 1N5368+1N5337 5.46 3.921 Rad 20 Ω×50% 1.43 3.727 100 Ω×50% 7.15 5.669 200 Ω×50% 14.31 5.461 RC 10 Ω+1 μF 65.12 23.458 10 Ω+10 μF 9.78 19.085 DZR 1N4934+1N5337+10 Ω 6.86 3.752 1N4934+1N5337+50 Ω 12.58 3.343 1N5401+1N5337+10 Ω 6.68 3.775 1N5401+1N5337+50 Ω 12.39 3.355  下载: 导出CSV
下载: 导出CSV
表 2 抑制反峰电压电路方法对比
Table 2. Comparison of methods to suppress peak inverse voltage
方法 对比项 适用性 抑制PIV峰值效果 复位时间 额外功耗 选型难易 D 最佳 偏长 很小 简单 优 DR 很好 偏长 很小 稍复杂 良 DRC 很好 偏长 很小 复杂 良 DZ 好 短 很小 稍复杂 优 ZZ 好 短 很小 稍复杂 优 Rad 很好 最短 大 复杂 中 RC 最差 最长 较小 复杂 差 DZR 较好 很短 很小 复杂 良
下载: 导出CSV
表 3 不同抑制反峰电压方法的适用情况举例
Table 3. Examples of application on different methods to suppress peak inverse voltage
执行部件 控制特性 适用电路方法及其次序 电磁阀 高频开关动作 DZ、D、ZZ 电动阀 低频开关动作 D、DZ、ZZ 电点火器 低频开关动作 D、DZ、ZZ 电磁气动阀 高频开关动作 DZ、D、ZZ 流量调节器 步进动作/高频开关动作 DZ、D、ZZ
下载: 导出CSV
表 4 控制电流测量电路的设计条件和设计目标
Table 4. Design conditions and design objectives of control current measurement circuit
ACS712供电
电压/VACS712输出
电压/V参考
电压/V正负
隔离电源/VLM321输出
电压/V5 1.575~3.425 2.5 ±12 −10~10
下载: 导出CSV
表 5 控制电路测试项
Table 5. Control circuit test items
序号 测试项 1 控制驱动电路及电流测量电路的动态性能 2 电流测量电路的准确度 3 控制电路抑制反峰电压效果
下载: 导出CSV
表 6 开关电源输出阶梯型电流
Table 6. Switching power supply outputs stepped current
序号 升程电流/A 回程电流/A 持续时间/s 1 0 0 3 2 1.25 1.25 3 3 2.5 2.5 3 4 3.75 3.75 3 5 5 5 3
下载: 导出CSV
表 7 控制电流测量电路准确度分析结果
Table 7. Accuracy analysis results of control current measurement circuit
电流标准值/A 理论输出值/V 升程电压/V 回程电压/V 第1组 第2组 第3组 第1组 第2组 第3组 0 0 −0.13953 −0.10075 −0.06805 −0.06151 −0.07936 −0.09029 1.25 2.5 2.24591 2.29788 2.30546 2.32679 2.35502 2.31732 2.5 5 4.66812 4.67193 4.68949 4.69761 4.70027 4.72886 3.75 7.5 7.05219 7.06046 7.08349 7.04689 7.06249 7.1007 5 10 9.40493 9.45529 9.43293 9.43447 9.43617 9.43293 注:准确度分析结果:线性误差为0.00215,回差为0.00499,重复性误差为0.00714,基本误差(满量程)为0.05678,零点输出误差为0.00899。
下载: 导出CSV
-
[1] 凌思睿, 丁博深. 火箭发动机试验电磁阀电流隔离式测量电路[J]. 火箭推进, 2020, 46(5): 102-108.LING S R, DING B S. Isolated solenoid valve current measurement circuit in rocket engine test[J]. Journal of Rocket Propulsion, 2020, 46(5): 102-108(in Chinese). [2] 余力凡, 马红梅. 运载火箭控制系统电磁继电器消反峰电路分析与MULTISIM仿真[J]. 计算机测量与控制, 2017, 25(11): 55-57.YU L F, MA H M. Analysis and MULTISIM simulation of electromagnetic relay anti-PIV circuit in launch vehicle control system[J]. Computer Measurement& Control, 2017, 25(11): 55-57(in Chinese). [3] 方蜀州, 尹治武. 固体姿轨控发动机燃气电磁阀快速驱动电路研究[J]. 固体火箭技术, 2005, 28(3): 232-234.FANG S Z, YIN Z W. The fast driving circuit for gas solenoid valve of solid rocket divert and attitude control motor[J]. Journal of Solid Rocket Technology, 2005, 28(3): 232-234(in Chinese). [4] 弭艳, 张红霞, 马兵兵, 等. 基于双向TVS的电磁阀加速释放电路研究[J]. 计算机测量与控制, 2019, 27(8): 182-187.MI Y, ZHANG H X, MA B B, et al. Accelerated release circuit of solenoid valve based on bidirectional TVS[J]. Computer Measurement & Control, 2019, 27(8): 182-187(in Chinese). [5] 沈福东. 浅谈直流感性负载消除反电动势电路设计[J]. 科技创新导报, 2012, 9(15): 55.SHEN F D. Discussion on circuit design of DC inductive load eliminating back EMF[J]. Science and Technology Innovation Herald, 2012, 9(15): 55(in Chinese). [6] 卫强, 郭红杰, 刘洌, 等. 基于PXI的液体姿轨控火箭发动机试验测控系统设计与实现[J]. 航空动力学报, 2016, 31(12): 2979-2987.WEI Q, GUO H J, LIU L, et al. Design and implementation of PXI based test measurement and control system for attitude and orbit control liquid rocket engine[J]. Journal of Aerospace Power, 2016, 31(12): 2979-2987(in Chinese). [7] ITODA S, NISHIDA T, MATSUO S. Control circuit for switch apparatus, has rectifier circuit or element for surge absorption that is connected between power supply and control circuit: Japan, WO2018159041-A1[P]. 2018-07-09. [8] DOI M, YASUI T.Electromagnetic valve-control circuit for controlling opening/closing of solenoid valve for physics and chemistry fields to measure flow volume of fluid, has voltage absorption unit and capacitor for becoming parallel with respect to valve: Japan, JP2014206240-A[P]. 2014-10-30. [9] CHOI J H. Surge absorption circuit for protection equipment, particularly for absorbing transient voltage and noise flowed in instrument, comprises suppression assembly and varistor units for absorbing transient voltages and induced noise components: Korea, KR2015083300-A[P]. 2015-07-17. [10] NICOLAE P M, STĂNESCU D G, NICOLAE M S, et al. Considerations on signals conditioning circuits[C]//Proceedings of the 11th International Conference on Electrical Power Quality and Utilisation. Piscataway: IEEE Press, 2011: 1-6. [11] 王明迪, 李建勋. 霍尔电流传感器在阀门电流测试中的应用[J]. 微型电脑应用, 2009, 25(11): 17-19.WANG M D, LI J X. Application of hall current sensor in valve current measurement[J]. Microcomputer Applications, 2009, 25(11): 17-19(in Chinese). [12] 武旭, 王林森, 居鹏, 等. 基于闭环霍尔电流传感器驱动电路的设计[J]. 控制工程, 2020, 27(7): 1210-1215.WU X, WANG L S, JU P, et al. Design of drive circuit based on closed-loop hall current sensor[J]. Control Engineering of China, 2020, 27(7): 1210-1215(in Chinese). [13] 沈传兵, 苏杭, 朱子勇. 基于PLC和WinCC的火箭发动机热真空试验控制系统[J]. 火箭推进, 2015, 41(3): 93-97.SHEN C B, SU H, ZHU Z Y. Control system for liquid rocket engine heat-vacuum test based on PLC and WinCC[J]. Journal of Rocket Propulsion, 2015, 41(3): 93-97(in Chinese). [14] 张卫东, 李力, 张茂森, 等. 基于虚拟仪器和PXI总线的电磁阀控制系统研制[J]. 火箭推进, 2015, 41(1): 112-116.ZHANG W D, LI L, ZHANG M S, et al. Development of solenoid valve control system based on virtual instrument and PXI bus[J]. Journal of Rocket Propulsion, 2015, 41(1): 112-116(in Chinese). [15] 翟国富, 崔行磊, 杨文英. 电磁继电器产品及研究技术发展综述[J]. 电器与能效管理技术, 2016, 2016(2): 1-8.ZHAI G F, CUI X L, YANG W Y. Overview for development of research and technologies of electromagnetic relays[J]. Electrical & Energy Management Technology, 2016, 2016(2): 1-8(in Chinese). [16] 航天部第一研究院技术部标准化处. 气动电磁阀通用技术要求: QJ1141-87[S]. 北京: 中华人民共和国航天工业部, 1987: 1-8.Department of Standardization, Department of Technology, First Research Institute of Aerospace Ministry. Pneumatic solenoid valve general technical requirements: QJ1141-87[S]. Beijing: Ministry of Aerospace Industry of the People’s Republic of China, 1987: 1-8(in Chinese). [17] OMRON. Solid state relays common precautions[R]. Kyoto: OMRON, 1-9. [18] CARTER B. 运算放大器权威指南[M]. 4版. 北京: 人民邮电出版社, 2014: 227.CARTER B. OP AMPs for everyone[M]. 4th ed. Beijng: Posts and Telecom Press, 2014: 227(in Chinese). [19] BALNDFORD D, PARR J. 数字信号处理及MATLAB仿真[M]. 北京: 机械工业出版社, 2015: 500.BALNDFORD D, PARR J. Introduction to digital signal processing[M]. Beijing: China Machine Press, 2015: 500(in Chinese). [20] 中华人民共和国国家发展和改革委员会. 霍尔电流传感器: JB/T 7490—2007[S]. 北京: 机械工业出版社, 2007: 15.National Development and Reform Commission of the People’s Republic of China. Hall effect current sensor: JB/T 7490—2007[S]. Beijing: China Machine Press, 2007: 15(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 132
- HTML全文浏览量: 87
- PDF下载量: 4
- 被引次数: 0
