



Vision-based path planning algorithm of unmanned bird-repelling vehicles in airports
-
摘要:
机场飞行区存在的低空飞鸟严重威胁飞行器的起飞和降落安全,现有的驱鸟措施难以高效驱离低空飞鸟,且存在设备资源消耗高、受时空影响大等问题。为此,使用无人驱鸟车替代有人驾驶车辆进行驱鸟工作,并使用搭载固定摄像云台的无人驱鸟车对机场低空中鸟类进行实时检测,获取鸟情数据后,为无人驱鸟车路径规划提供鸟情数据基础。针对鸟类检测的问题,提出一种基于坐标注意力机制改进的YOLOv5网络,对小目标鸟类进行高效的实时检测,使网络更加精准地对鸟类进行定位;针对传统路径规划算法存在路径距离较长、拐点较多等缺陷,提出一种改进的天牛群算法,可有效缩短无人驱鸟车行驶距离,精准躲避机场内静态障碍物和动态障碍物,并快速到达指定驱鸟位置。实验结果表明:所提算法可对机场鸟类进行有效检测,为无人驱鸟车及时提供鸟情数据,利用改进的天牛群算法缩短规划路径的距离,使无人驱鸟车更加精准快速地到达指定驱鸟位置,有效减少人力资源投入,节约无人驱鸟车行进所需能源,提高驱鸟效率。
Abstract:Low-flying birds flying in the vicinity of the airports are a serious threat to the safety of aircraft takeoff and landing, and the existing bird-repelling measurements make it difficult to effectively repel low-flying birds for high instrument resource consumption and large spatio-temporal influence. In order to reduce the workload associated with repelling birds, this paper suggests replacing manned vehicles with unmanned vehicles. These unmanned vehicles will be outfitted with fixed cameras to enable real-time bird detection near the airport, as well as the collection and provision of bird data for the unmanned vehicles’ route planning. The method is divided into two parts: bird detection and path planning of unmanned bird-repelling vehicles. In order to enhance the accuracy of the network’s bird location, this study first addresses bird detection. Specifically, it suggests an enhanced YOLOv5 network that utilizes a coordinate attention mechanism to effectively identify small target birds in real time. Second, in view of the path planning problem of unmanned bird-repelling vehicles, the traditional path planning algorithms need to be improved in perspectives of long path distances and more inflection points. Therefore, an improved beetle swarm optimization algorithm is proposed in this paper, which can effectively shorten the marched distance of unmanned bird-repelling vehicles, accurately avoid static obstacles and dynamic obstacles in the airport, and quickly reach the designated location. The results show that the method can effectively detect airport birds, and provide timely bird data for unmanned bird-repelling vehicles. The route planning distance can be shortened by using the enhanced beetle swarm optimization technique, giving unmanned bird-repelling vehicles quick access to designated locations. It can effectively reduce human resource investments, save the unmanned bird-repelling vehicles energy, and improve the bird-repelling efficiency.
-

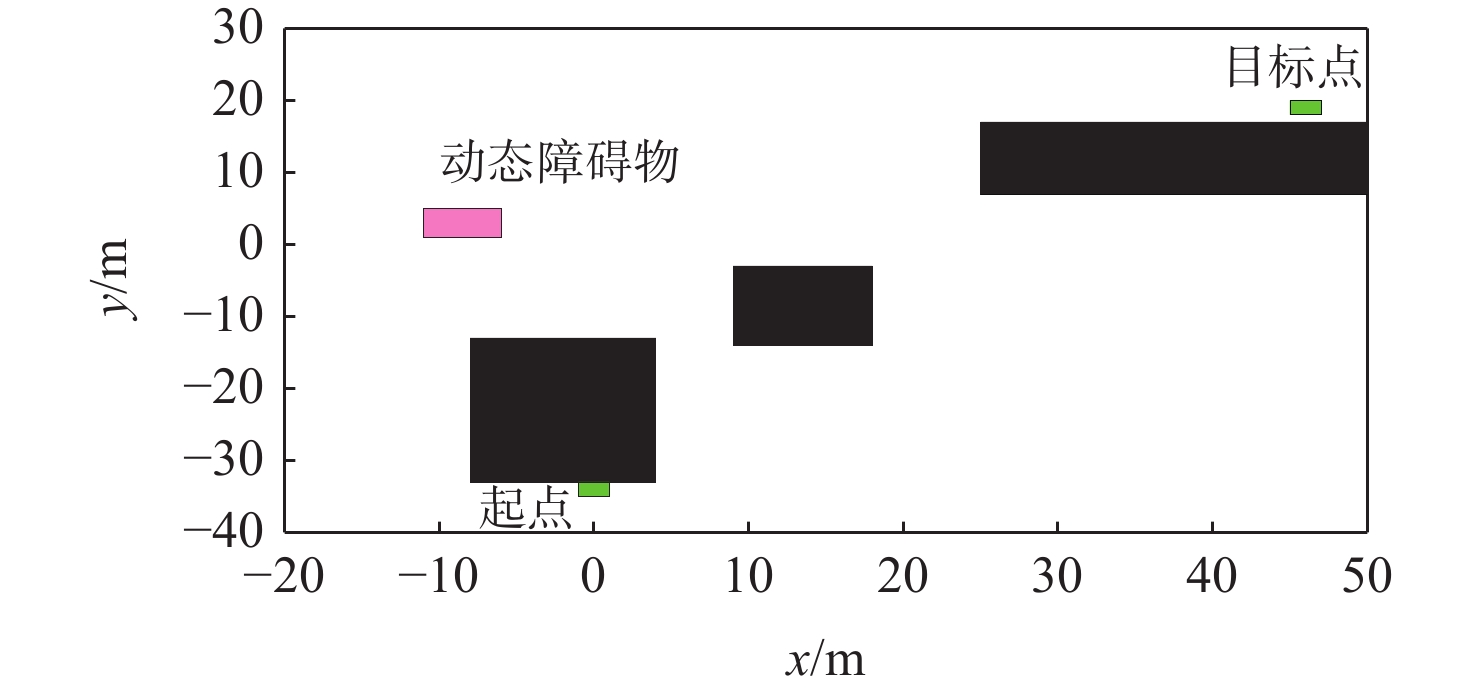
图 2 路径规划环境建模示意图
Figure 2. Schematic diagram of environmental modeling for path planning
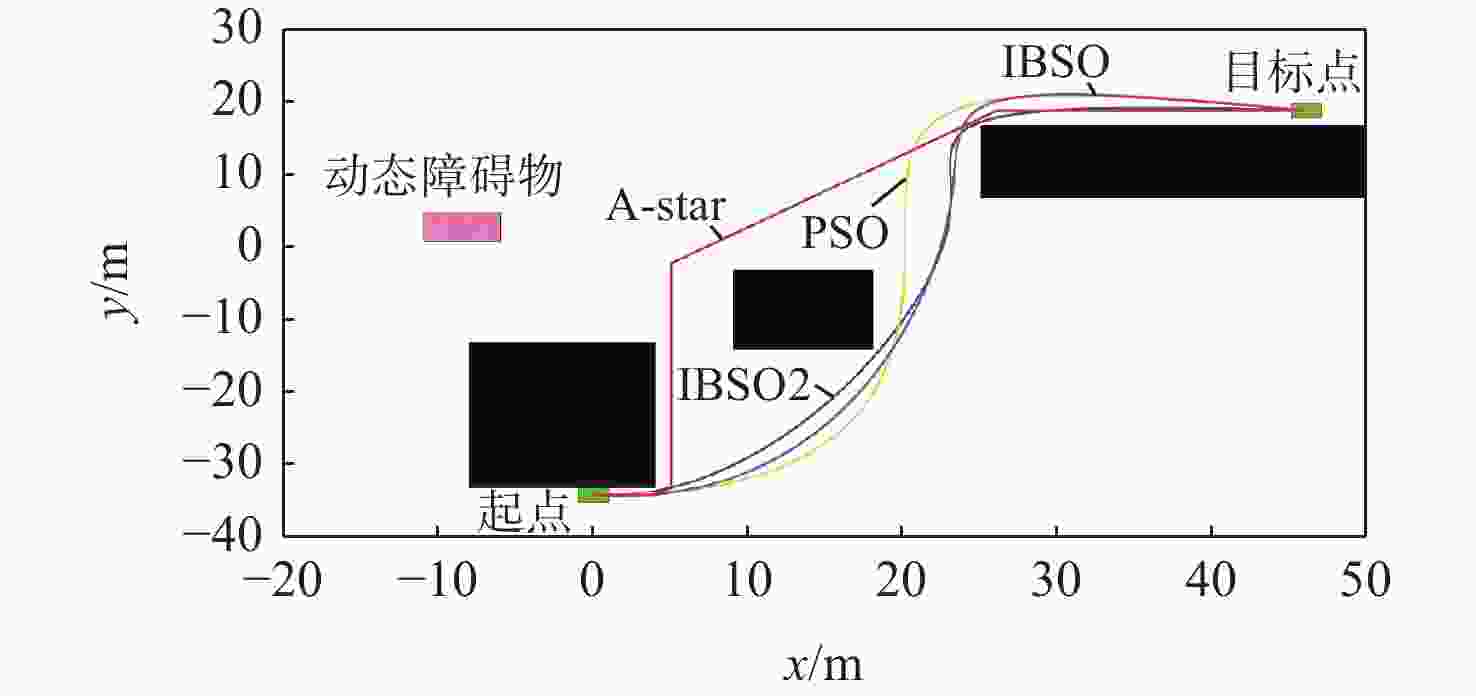
图 5 4种算法静态环境下路径规划仿真结果
Figure 5. Simulation results of path planning in static environment compared with four algorithms

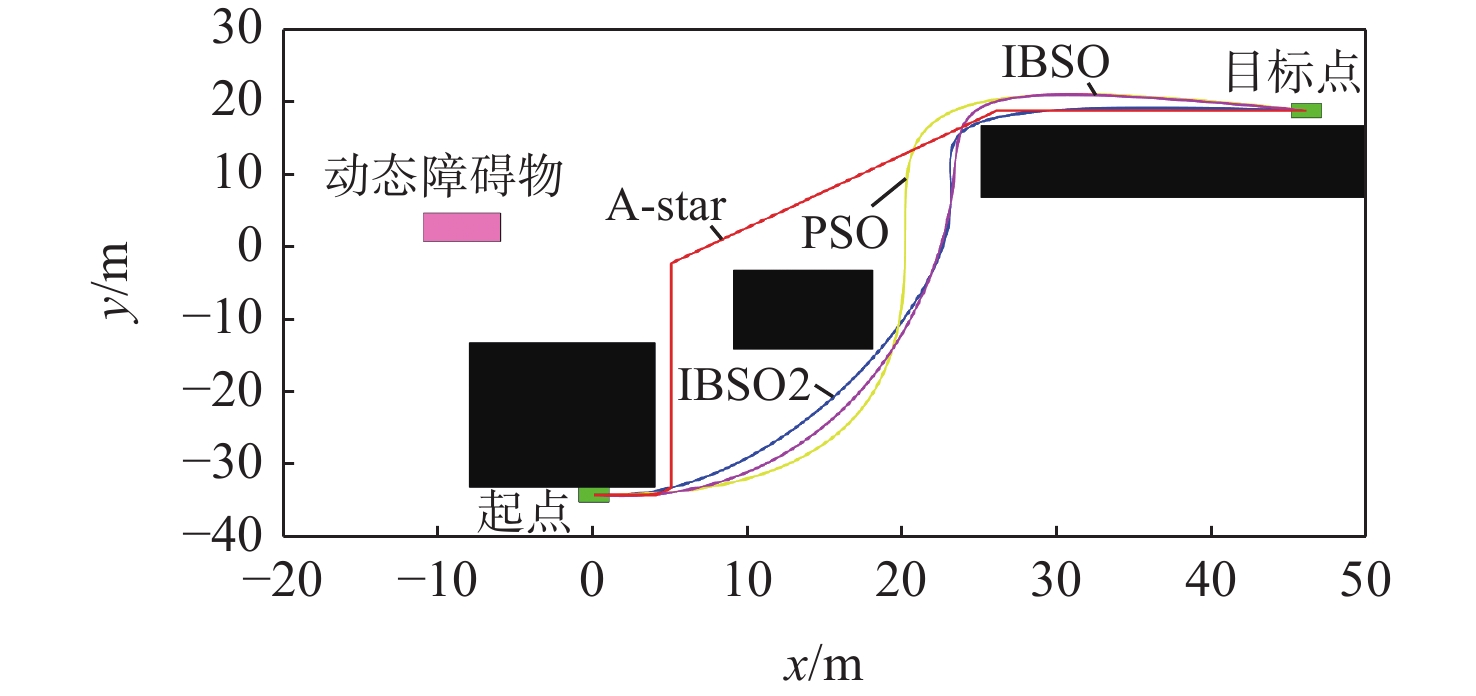
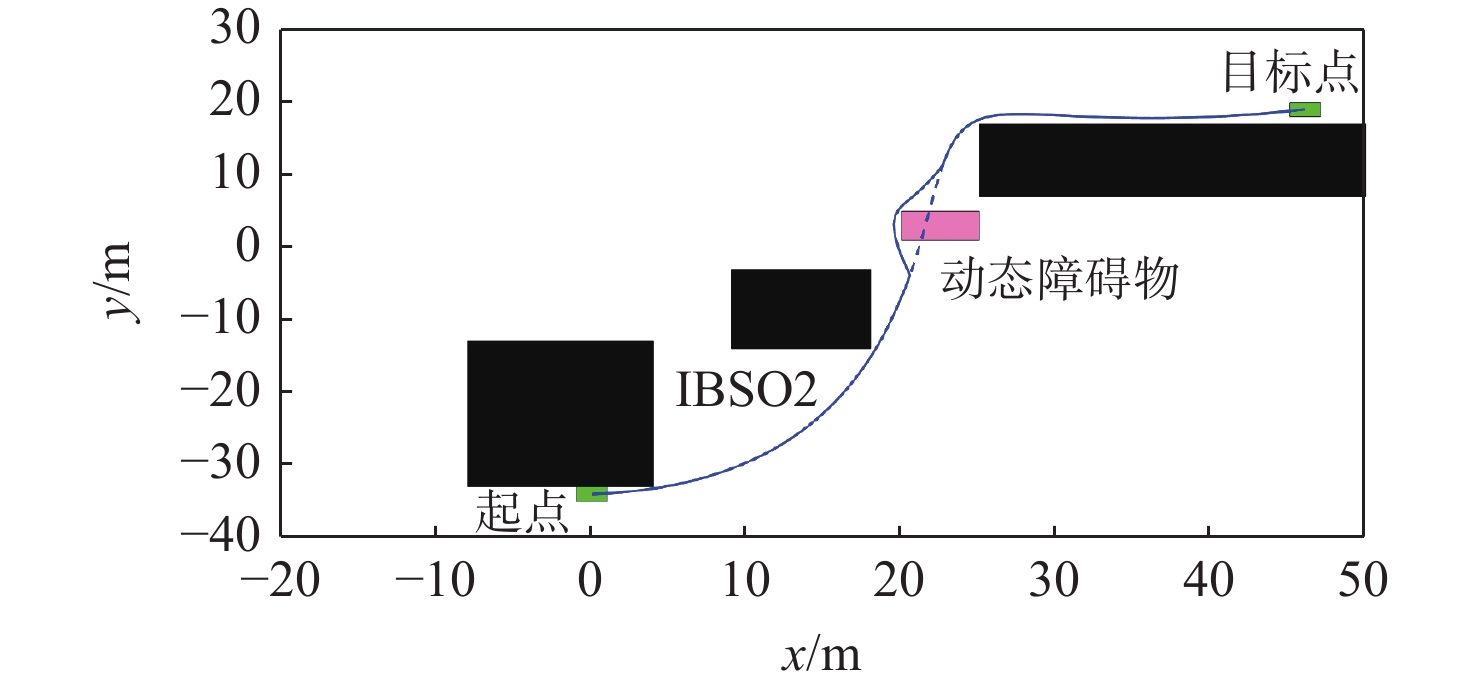
图 6 存在动态障碍物的路径规划仿真结果
Figure 6. Simulation results of path planning in the presence of dynamic obstacles
表 1 改进的CSPDarkNet53主干网络结构
Table 1. Improved CSPDarknet53 backbone network architecture
模块 数量 参数量 尺寸 输出尺寸 Focus 1 3520 1×1 320×320 Conv 1 18560 3×3 160×160 C3 3 18816 160×160 CA 1 1688 160×160 Conv 1 73984 3×3 80×80 C3 9 156928 80×80 CA 1 3352 80×80 Conv 1 295424 3×3 40×40 C3 9 625152 40×40 CA 1 6680 40×40 Conv 1 1180672 3×3 20×20 SPP 1 656896 1×1, 5×5, 9×9, 13×13 20×20 C3 3 1182720 20×20  下载: 导出CSV
下载: 导出CSV
表 2 鸟类检测实验结果对比
Table 2. Comparison of bird detection experimental results
方法 召回率 精准率 平均精度 检测速度/(帧·s−1) YOLOv5 0.823 0.841 0.874 57.2 改进YOLOv5 0.902 0.914 0.931 55.9
下载: 导出CSV
表 3 4种算法运行100次的路径长度平均值
Table 3. Average path length of the four algorithms for 100 runs
算法 路径长度/m A-star 86.122 PSO 89.725 IBSO 84.736 IBSO2 83.026
下载: 导出CSV
-
[1] HE K, ZHANG X, REN S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. doi: 10.1109/TPAMI.2015.2389824 [2] GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2014: 580-587. [3] LIU W, ANGUELOV D, ERHAN D, et al. SSD: Single shot multibox detector[C]//Proceedings of the European Conference on Computer Vision. Berlin: Springer, 2016: 21-37. [4] REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 779-788. [5] REDMON J, FARHADI A. YOLO9000: Better, faster, stronger[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 7263-7271. [6] REDMON J, FARHADI A. YOLOv3: An incremental improvement[EB/OL]. (2018-04-08)[2022-05-25]. https://arxiv.org/abs/1804.02767. [7] BOCHKOVSKIY A, WANG C Y, LIAO H Y. YOLOv4: Optimal speed and accuracy of object detection[EB/OL]. (2020-04-23)[2022-05-25]. https://arxiv.org/abs/2004.10934. [8] HOU Q, ZHOU D, FENG J. Coordinate attention for efficient mobile network design[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2021: 13713-13722. [9] 赵江, 张岩, 马泽文, 等. 对AGV路径规划A星算法的改进与验证[J]. 计算机工程与应用, 2018, 54(21): 217-223.ZHAO J, ZHANG Y, MA Z W, et al. Improvement and verification of A-star algorithm for AGV path planning[J]. Computer Engineering and Applications, 2018, 54(21): 217-223(in Chinese). [10] TANG G, TANG C Q, CLARAMUNT C, et al. A-star algorithm: An improved A-star algorithm for AGV path planning in a port environment[J]. IEEE Access, 2021, 9: 59196-59210 . doi: 10.1109/ACCESS.2021.3070054 [11] OROZCO-ROSAS U, PICOS K, MONTIEL O. Hybrid path planning algorithm based on membrane pseudo-bacterial potential field for autonomous mobile robots[J]. IEEE Access, 2019, 7: 156787-156803. doi: 10.1109/ACCESS.2019.2949835 [12] 张万绪, 张向兰, 李莹. 基于改进粒子群算法的智能机器人路径规划[J]. 计算机应用, 2014, 34(2): 510-513.ZHANG W X, ZHANG X L, LI Y. Path planning for intelligent robots based on improved particle swarm optimization algorithm[J]. Journal of Computer Applications, 2014, 34(2): 510-513(in Chinese). [13] 柳长安, 鄢小虎, 刘春阳, 等. 基于改进蚁群算法的移动机器人动态路径规划方法[J]. 电子学报, 2011, 39(5): 1220-1224.LIU C A, YAN X H, LIU C Y, et al. Dynamic path planning for mobile robot based on improved ant colony optimization algorithm[J]. Acta Electronica Sinica, 2011, 39(5): 1220-1224(in Chinese). [14] VIEIRA R, ARGENTO E, REVOREDO T. Trajectory planning for car-like robots through curve parametrization and genetic algorithm optimization with applications to autonomous parking[J]. IEEE Latin America Transactions, 2022, 20(2): 309-316. doi: 10.1109/TLA.2022.9661471 [15] 杨俊成, 李淑霞, 蔡增玉. 路径规划算法的研究与发展[J]. 控制工程, 2017, 24(7): 1473-1480.YANG J C, LI S X, CAI Z Y. Research and development of path planning algorithm[J]. Control Engineering of China, 2017, 24(7): 1473-1480(in Chinese). [16] 魏彤, 龙琛. 基于改进遗传算法的移动机器人路径规划[J]. 北京航空航天大学学报, 2020, 46(4): 703-711.WEI T, LONG C. Path planning for mobile robot based on improved genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 703-711(in Chinese). [17] 段安娜, 周锐, 邸斌. 考虑先验信息的多机器人重点区域协同覆盖[J]. 北京航空航天大学学报, 2023, 49(6): 1479-1486.DUAN A N, ZHOU R, DI B. Multi-robot cooperative coverage of key regions considering priorinformation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(6): 1479-1486(in Chinese). [18] 赵萌, 路辉, 王诗琪, 等. 多种群合作学习的多模态多目标路径规划算法[J]. 北京航空航天大学学报, 2023, 49(3): 606-616.ZHAO M, LU H, WANG S Q, et al. A multimodal multi-objective path planning algorithm based on multi-swarm cooperative learning[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(3): 606-616(in Chinese). [19] 孙波, 陈卫东, 席裕庚. 基于粒子群优化算法的移动机器人全局路径规划[J]. 控制与决策, 2005, 20(9): 1052-1055.SUN B, CHEN W D, XI Y G. Particle swarm optimization based global path planning for mobile robots[J]. Control and Decision, 2005, 20(9): 1052-1055(in Chinese). [20] TONG Y F, ZHONG M, LI J W, et al. Research on intelligent welding robot path optimization based on GA and PSO algorithms[J]. IEEE Access, 2018, 6: 65397-65404. doi: 10.1109/ACCESS.2018.2878615 [21] 赵辉, 郝梦雅, 王红君, 等. 基于改进A*算法与天牛须搜索算法的农业机器人路径规划方法[J]. 科学技术与工程, 2019, 19(31): 185-190.ZHAO H, HAO M Y, WANG H J, et al. Path planning method of agricultural robot based on improved A* algorithm and beetle antennae search algorithm[J]. Science Technology and Engineering, 2019, 19(31): 185-190(in Chinese). [22] HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 7132-7141. [23] WOO S, PARK J, LEE J Y, et al. CBAM: Convolutional block attention module[C]//Proceedings of the European Conference on Computer Vision. Berlin: Springer, 2018: 3-19. [24] 单梁, 强浩, 李军, 等. 基于Tent映射的混沌优化算法[J]. 控制与决策, 2005, 20(2): 179-182.SHAN L, QIANG H, LI J, et al. Chaos optimization algorithm based Tent map[J]. Control and Decision, 2005, 20(2): 179-182(in Chinese). [25] WANG R, LI J M. A new improved beetle swarm optimization algorithm[C]//Proceedings of the Chinese Intelligent Systems Conference. Berlin: Springer, 2021, 805: 663-671. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 298
- HTML全文浏览量: 103
- PDF下载量: 43
- 被引次数: 0
