



-
摘要:
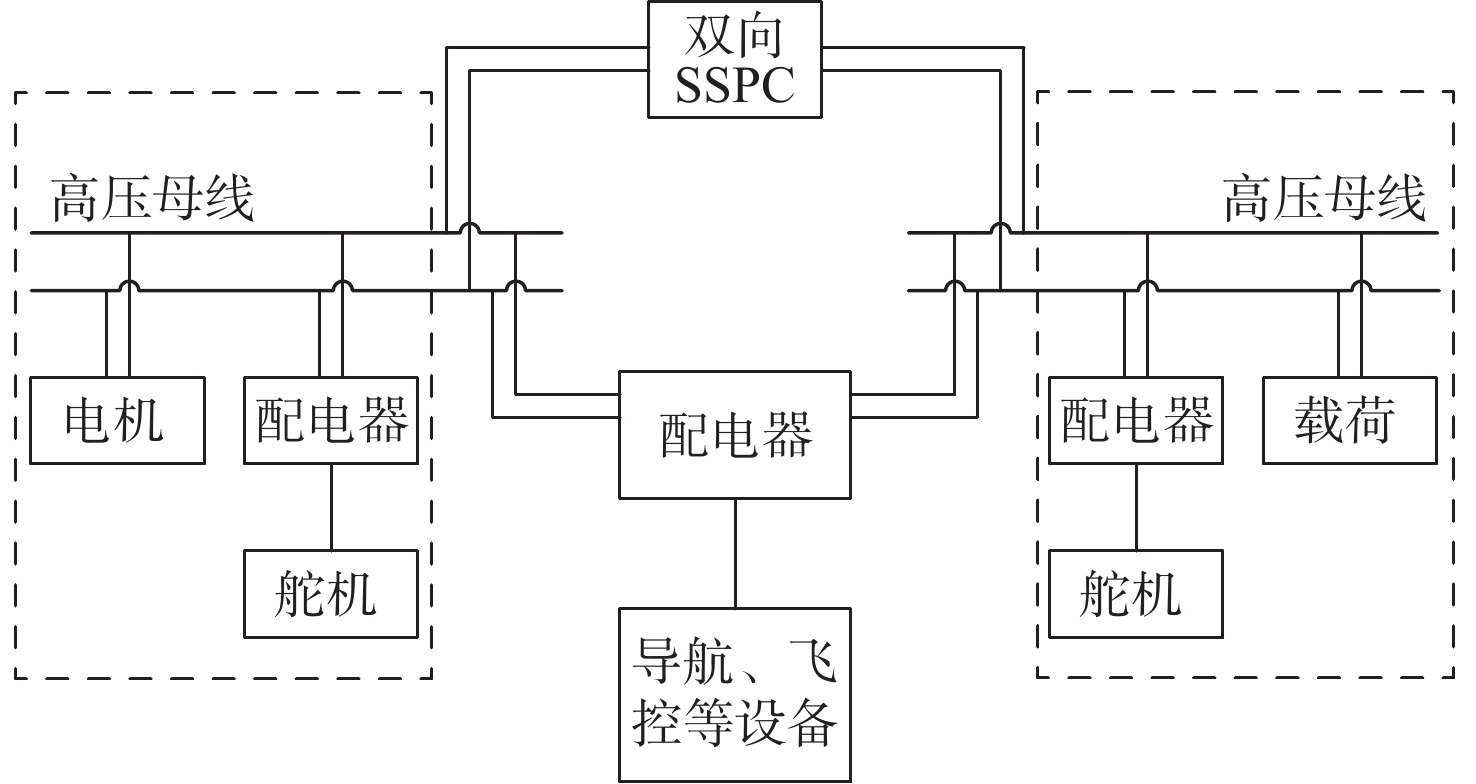
临近空间作为地球空间新的认知领域和重要的安全空间受到世界主要大国的重视,临近空间太阳能无人机是世界航空科技领域的研究热点,传统的设计方法中,能源、动力、飞控、载荷等独立设计,无法有效减轻结构质量,也难以达到总体性能最优。基于此,从能源系统可靠性和能源动力飞控一体化设计2个角度对临近空间太阳能无人机能源管理开展研究,以达到结构质量减重与总体性能优化的目的。采用双余度能源管理方案设计,通过双向固态功率控制器(SSPC)进行隔离与控制,实现单次故障状态下的安全返回;开展能源动力飞控一体化设计,将储能电池控制、电机控制、电源控制和飞行控制一体化设计,在硬件上减轻质量,软件上达到协同控制的目的;采用改进蚁群优化算法进行太阳能无人机的三维航迹规划,并将规划航迹作为能源系统地面模拟综合试验的输入进行一体化控制方案的仿真验证,实现了能源管理、动力控制与飞行控制的协同控制。
Abstract:As a newly recognized domain of geospace and an important area for national security, near space has gradually attracted the attention of major countries worldwide. Solar-powered UAVs in near space have become a research hotspot in aerospace technology. However, in conventional designs, energy, power, flight control and payloads are designed independently, whcih making it difficult to reduce structural weight and optimize overall performance. This paper researched the energy management of solar-powered UAVs from the perspectives of energy system reliability and the integrated design of energy, power, and flight control, aiming to achieve structural weight reduction and overall performance optimization. The specific contents are as follows. A dual-redundancy energy management scheme was designed, incorporating a bidirectional solid state power controller (SSPC) for isolation and control, realizing safe return under single-failure conditions. An integrated design was proposed, combining battery control, motor control, power control, and flight control. This design reduced hardware weight and enabled collaborative control through software. An improved ant colony optimization algorithm was adopted to generate a three-dimensional flight route for the solar-powered UAV, and the planned route was taken as an input for a comprehensive ground simulation test of the energy system. The proposed integrated control scheme was validated through simulation experiments, showing effective collaborative control of energy management, power control, and flight control.
-
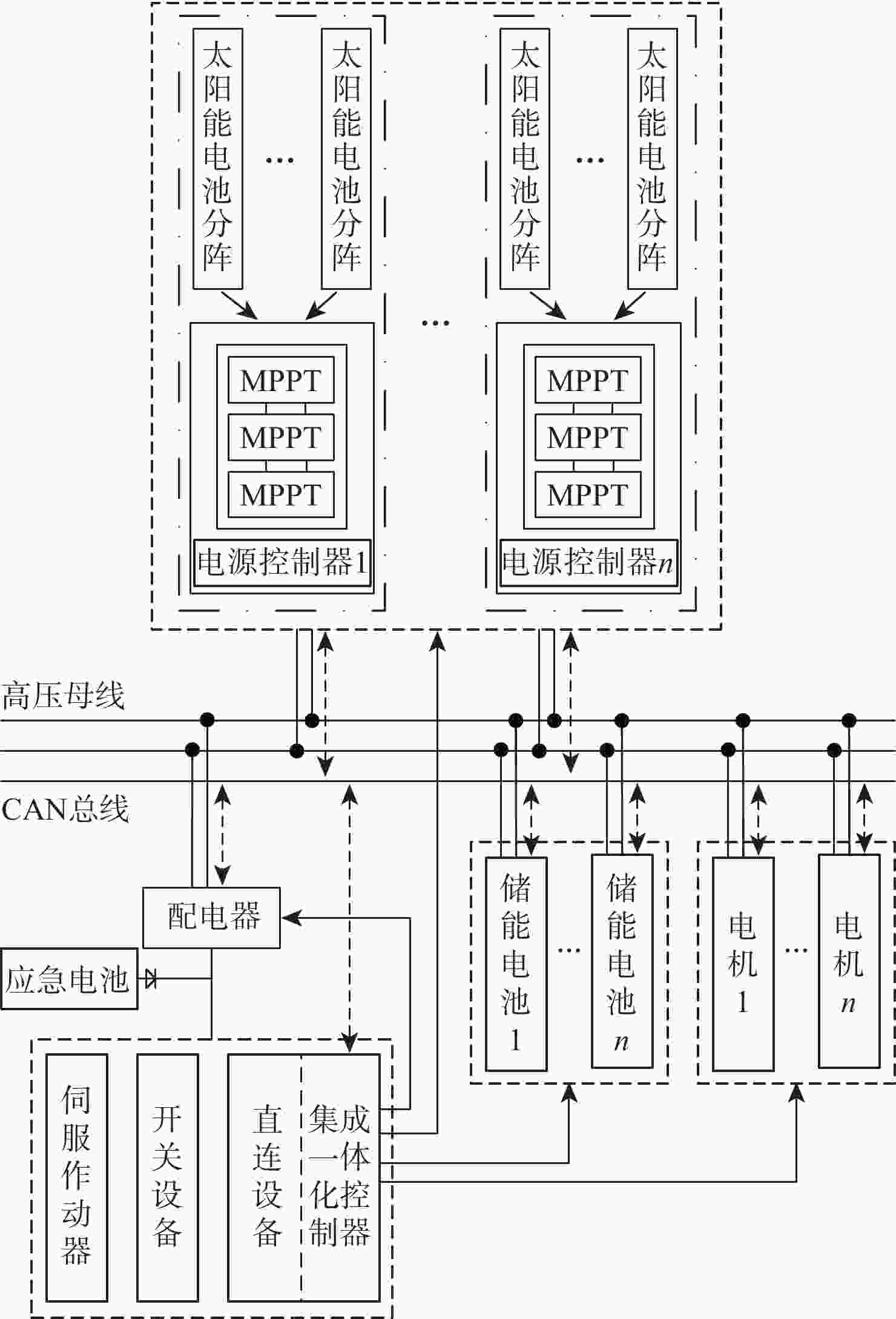
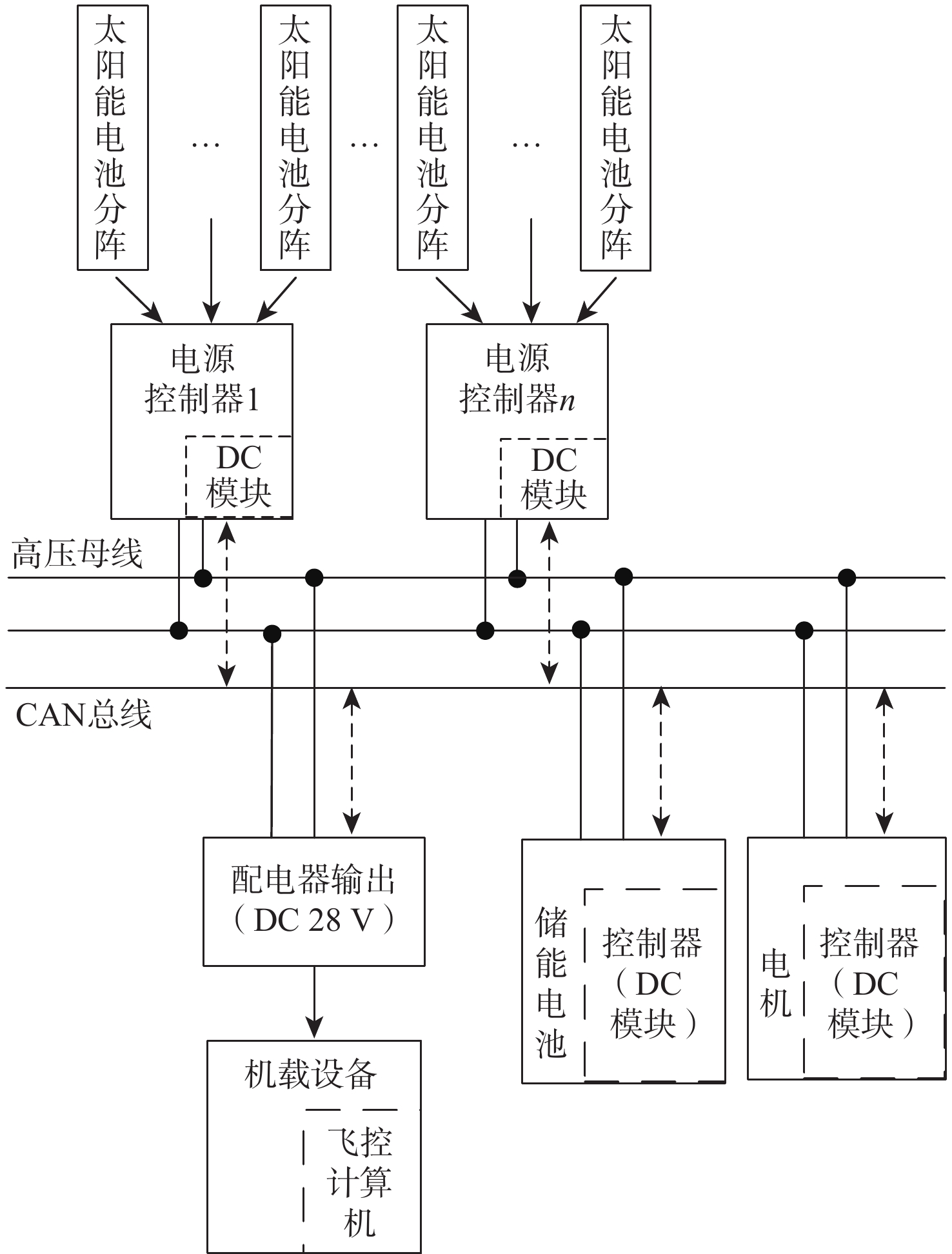
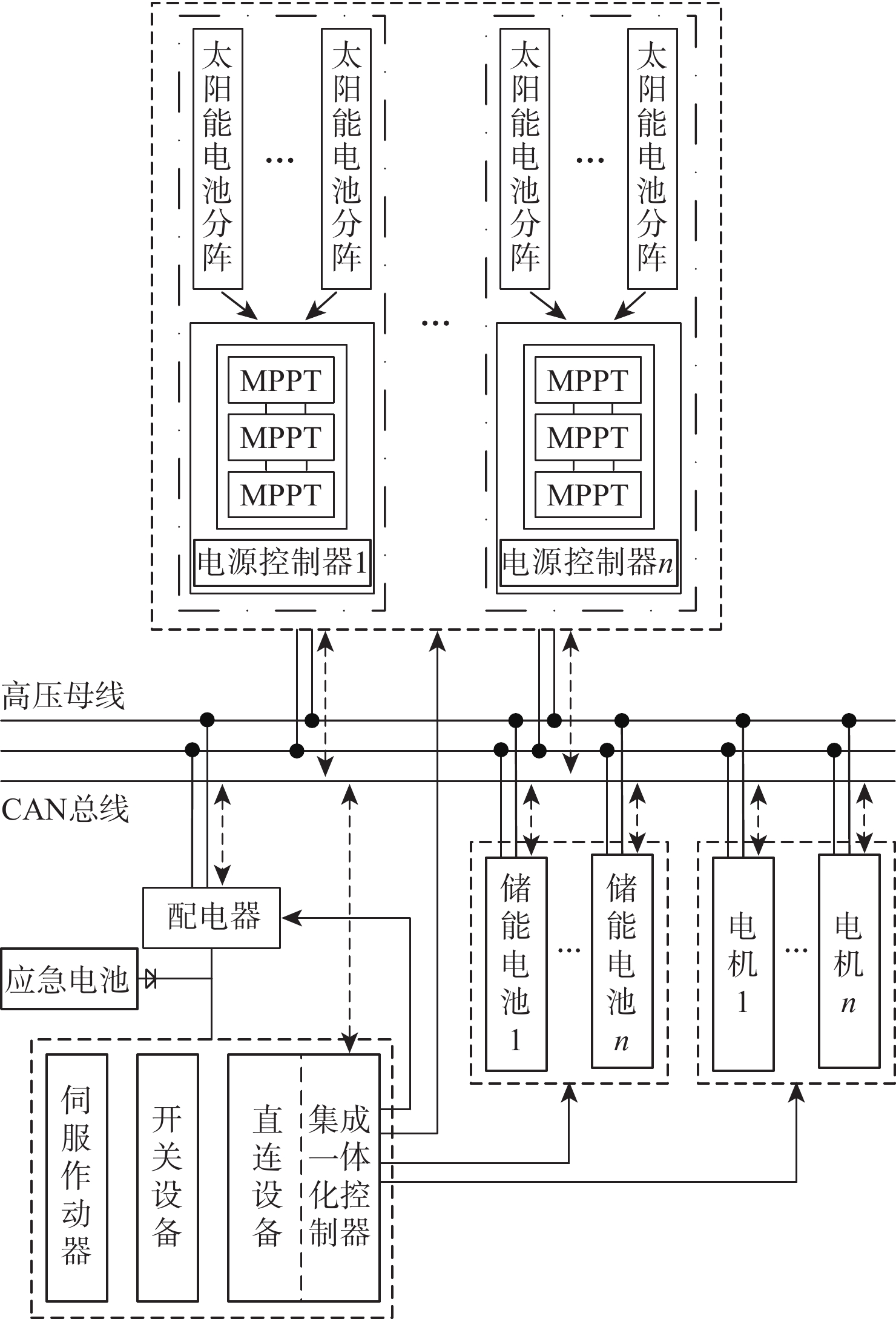
图 6 能源动力飞控一体化控制设计
Figure 6. Integrated control design of energy, power, and flight control
表 1 蚁群优化算法参数
Table 1. Parameters of ant colony optimization algorithm
参数 数值 最大迭代次数 200 蚂蚁数量 50 城市数量 19 信息素重要程度因子 1 启发函数重要程度因子 5 信息素挥发因子 0.1  下载: 导出CSV
下载: 导出CSV
表 2 飞机参数
Table 2. Aircraft parameters
参数 数值 机翼面积/m2 14.8 质量/kg 75 翼展/m 15 展弦比 15.5 奥斯瓦尔德因子 0.9 零升阻力系数 0.016 升力系数 0.741 推进系统效率 0.80 太阳能电池效率 0.181 航电功率/W 28 载荷功率/W 2 变速器效率 0.95 控制器效率 0.95 电机效率 0.90 最大迎角/(°) 10 电机功率/kW 3(最大)
下载: 导出CSV
表 3 仿真参数
Table 3. Simulation parameters
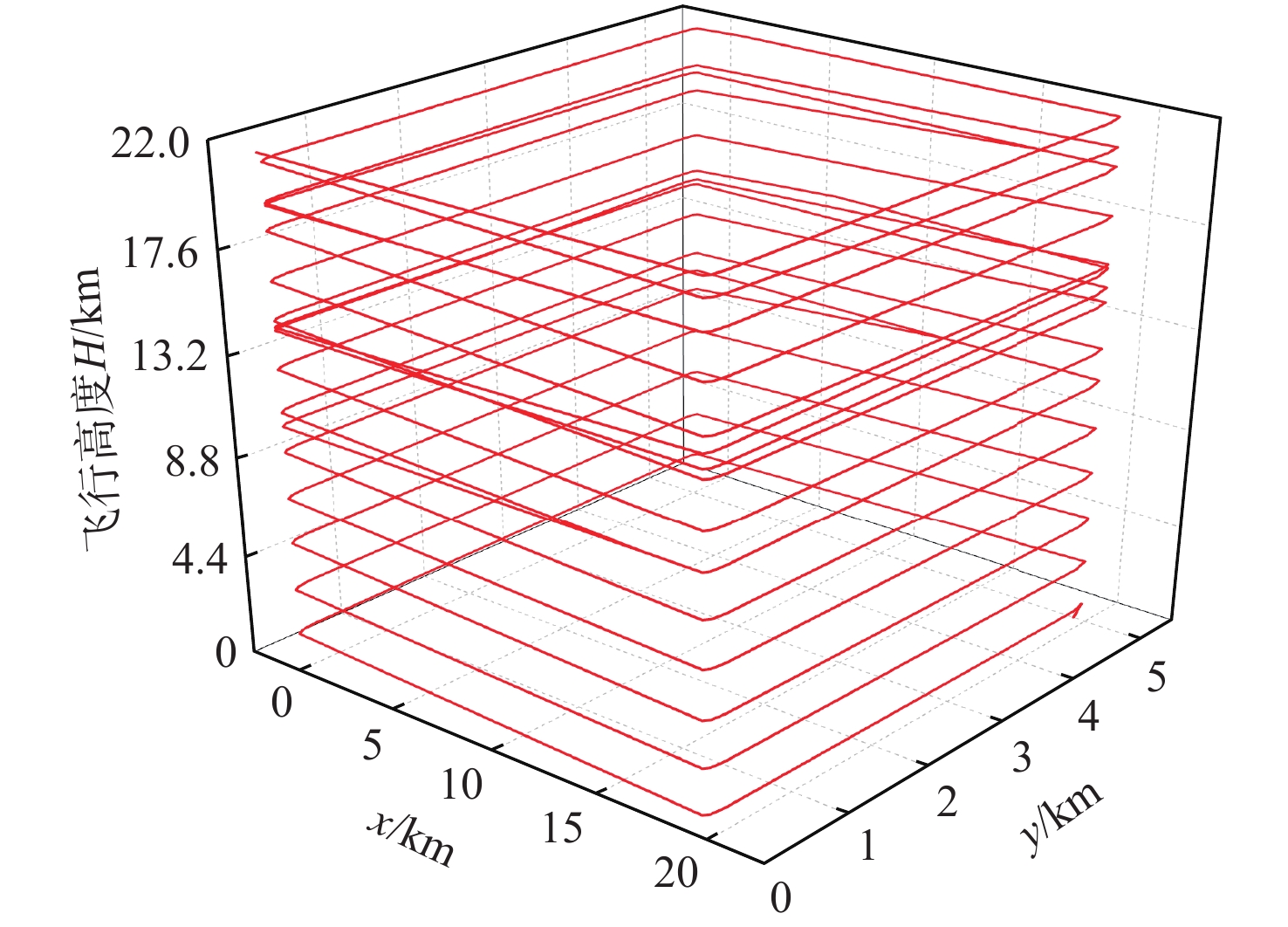
参数 数值 飞行高度范围/km 0~22 初始高度/km 20 航线范围/(km×km) 20×5(矩形航线) 最终高度/km 0 注:地点为包头, 时间为6月1日,开始时间为上午9:00。
下载: 导出CSV
-
[1] 王亚飞, 安永旺, 杨继何. 临近空间飞行器的现状及发展趋势[J]. 国防技术基础, 2010(1): 33-37.WANG Y F, AN Y W, YANG J H. Present situation and development trend of near-space vehicles[J]. Technology Foundation of National Defence, 2010(1): 33-37(in Chinese). [2] 陶于金. 临近空间超长航时太阳能无人机发展及关键技术[J]. 航空制造技术, 2016, 59(18): 26-30.TAO Y J. Development and key technology on near space long voyage solar unmanned aerial vehicle[J]. Aeronautical Manufacturing Technology, 2016, 59(18): 26-30(in Chinese). [3] QINETI Q. Solar aircraft achieves longest unmanned flight[J]. Reinforced Plastics, 2010, 54(5): 9. [4] 李晨飞, 姜鲁华. 临近空间长航时太阳能无人机研究现状及关键技术[J]. 中国基础科学, 2018, 20(2): 22-31. doi: 10.3969/j.issn.1009-2412.2018.02.004LI C F, JIANG L H. Research status and key technology of near space long endurance high altitude solar-powered unmanned air vehicle[J]. China Basic Science, 2018, 20(2): 22-31(in Chinese). doi: 10.3969/j.issn.1009-2412.2018.02.004 [5] 朱立宏, 孙国瑞, 呼文韬, 等. 太阳能无人机能源系统的关键技术与发展趋势[J]. 航空学报, 2020, 41(3): 623503.ZHU L H, SUN G R, HU W T, et al. Key technology and development trend of energy system in solar powered unmanned aerial vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(3): 623503(in Chinese). [6] MOHARRAM M A, KISHK A A. Optically transparent reflectarray antenna design integrated with solar cells[J]. IEEE Transactions on Antennas and Propagation, 2016, 64(5): 1700-1712. doi: 10.1109/TAP.2016.2539379 [7] TA S X, LEE J J, PARK I. Solar-cell metasurface-integrated circularly polarized antenna with 100% insolation[J]. IEEE Antennas and Wireless Propagation Letters, 2017, 16: 2675-2678. doi: 10.1109/LAWP.2017.2740570 [8] O’CONCHUBHAIR O, MCEVOY P, AMMANN M J. Dye-sensitized solar cell antenna[J]. IEEE Antennas and Wireless Propagation Letters, 2016, 16: 352-355. [9] 王少奇, 马东立, 杨穆清, 等. 高空太阳能无人机三维航迹优化[J]. 北京航空航天大学学报, 2019, 45(5): 936-943.WANG S Q, MA D L, YANG M Q, et al. Three-dimensional optimal path planning for high-altitude solar-powered UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(5): 936-943(in Chinese). [10] 朱炳杰, 杨宇丹, 杨希祥, 等. 太阳能飞行器能源昼夜闭环仿真分析[J]. 宇航学报, 2019, 40(8): 878-886. doi: 10.3873/j.issn.1000-1328.2019.08.004ZHU B J, YANG Y D, YANG X X, et al. Energy closed-loop simulation and analysis for solar powered aircraft round the clock[J]. Journal of Astronautics, 2019, 40(8): 878-886(in Chinese). doi: 10.3873/j.issn.1000-1328.2019.08.004 [11] 张德虎, 张健, 李军府. 太阳能飞机能量平衡建模[J]. 航空学报, 2016, 37(增刊1): 16-23.ZHANG D H, ZHANG J, LI J F. Energy balance modeling for solar powered aircrafts[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(Sup 1): 16-23(in Chinese). [12] 刘莉, 杜孟尧, 张晓辉, 等. 太阳能/氢能无人机总体设计与能源管理策略研究[J]. 航空学报, 2016, 37(1): 144-162.LIU L, DU M Y, ZHANG X H, et al. Conceptual design and energy management strategy for UAV with hybrid solar and hydrogen energy[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 144-162(in Chinese). [13] 刘莉, 曹潇, 张晓辉, 等. 轻小型太阳能/氢能无人机发展综述[J]. 航空学报, 2020, 41(3): 623474.LIU L, CAO X, ZHANG X H, et al. Review of development of light and small scale solar/hydrogen powered unmanned aerial vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(3): 623474(in Chinese). [14] NOTH A. Design of solar powered airplanes for continuous flight[D]. Zurich: Eidgenssische Technische Hochschule Zurich, 2008. [15] 陆运章, 郭进, 程文进, 等. 太阳能无人机能源控制器研究与设计[J]. 电子工业专用设备, 2017, 46(3): 45-50.LU Y Z, GUO J, CHENG W J, et al. Research and design of power management controller of solar unmanned aerial vehicle[J]. Equipment for Electronic Products Manufacturing, 2017, 46(3): 45-50(in Chinese). [16] WANG X Y, YANG Y P, WU D, et al. Mission-oriented 3D path planning for high-altitude long-endurance solar-powered UAVs with optimal energy management[J]. IEEE Access, 2020, 8: 227629-227641. doi: 10.1109/ACCESS.2020.3045934 [17] 王翔宇. 太阳能动力的球载投放无人机总体设计及能效优化设计[D]. 北京: 中国科学院大学, 2021.WANG X Y. Overall design and energy efficiency optimization design of solar-powered ball-borne unmanned aerial vehicle[D]. Beijing: University of Chinese Academy of Sciences, 2021(in Chinese). [18] SHELOKAR P S, JAYARAMAN V K, KULKARNI B D. An ant colony classifier system: application to some process engineering problems[J]. Computers & Chemical Engineering, 2004, 28(9): 1577-1584. [19] DORIGO M, MANIEZZO V, COLORNI A. Positive feedback as a search strategy: 91-016[R]. Milano: Laboratorio di Calcolatori, Dipartimento di Elettronica, Politecnico di Milano, 1999. [20] DORIGO M, GAMBARDELLA L M. Ant colonies for the traveling salesman problem[C]//Proceedings of the International Conference on Bio-inspired Information and Communication Technologies. Berlin: Springer, 1997: 73-81. [21] DORIGO M, GAMBARDELLA L M. Ant colony system: a cooperative learning approach to the traveling salesman problem[J]. IEEE Transactions on Evolutionary Computation, 1997, 1(1): 53-66. doi: 10.1109/4235.585892 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 704
- HTML全文浏览量: 154
- PDF下载量: 18
- 被引次数: 0
