



Planar motion control of distributed-driven vehicles considering dynamic hysteresis
-
摘要:
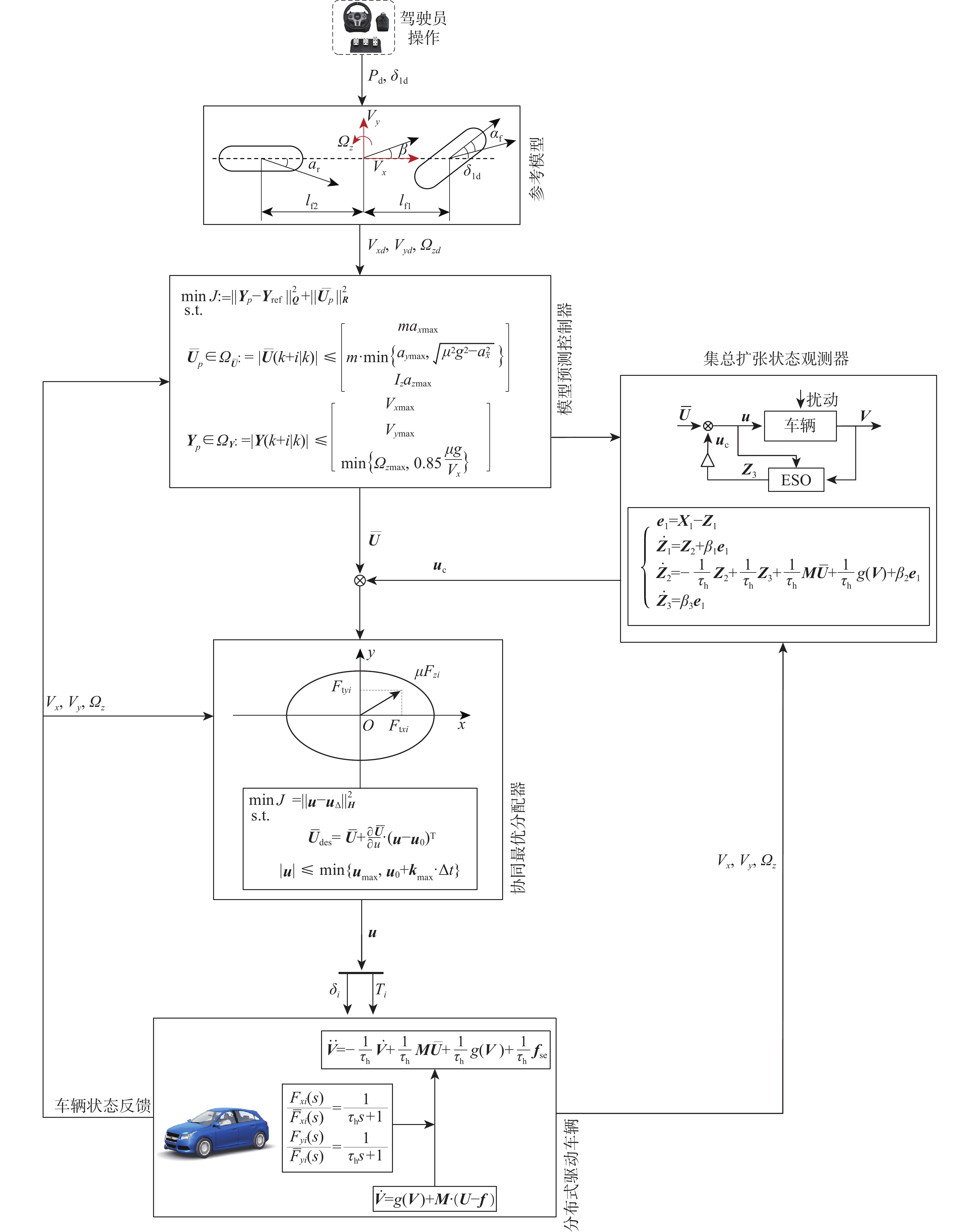
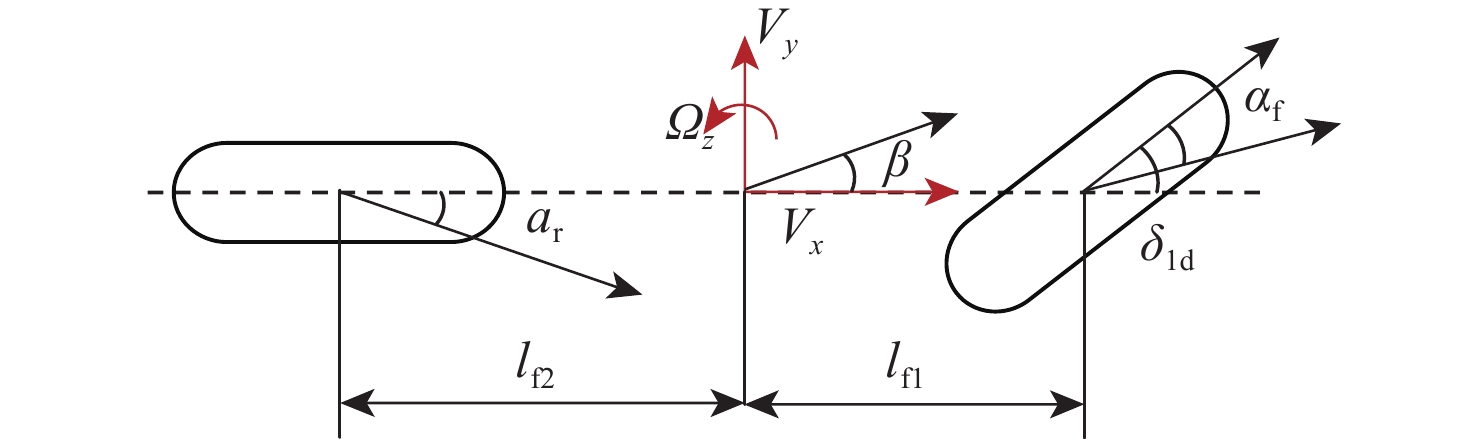
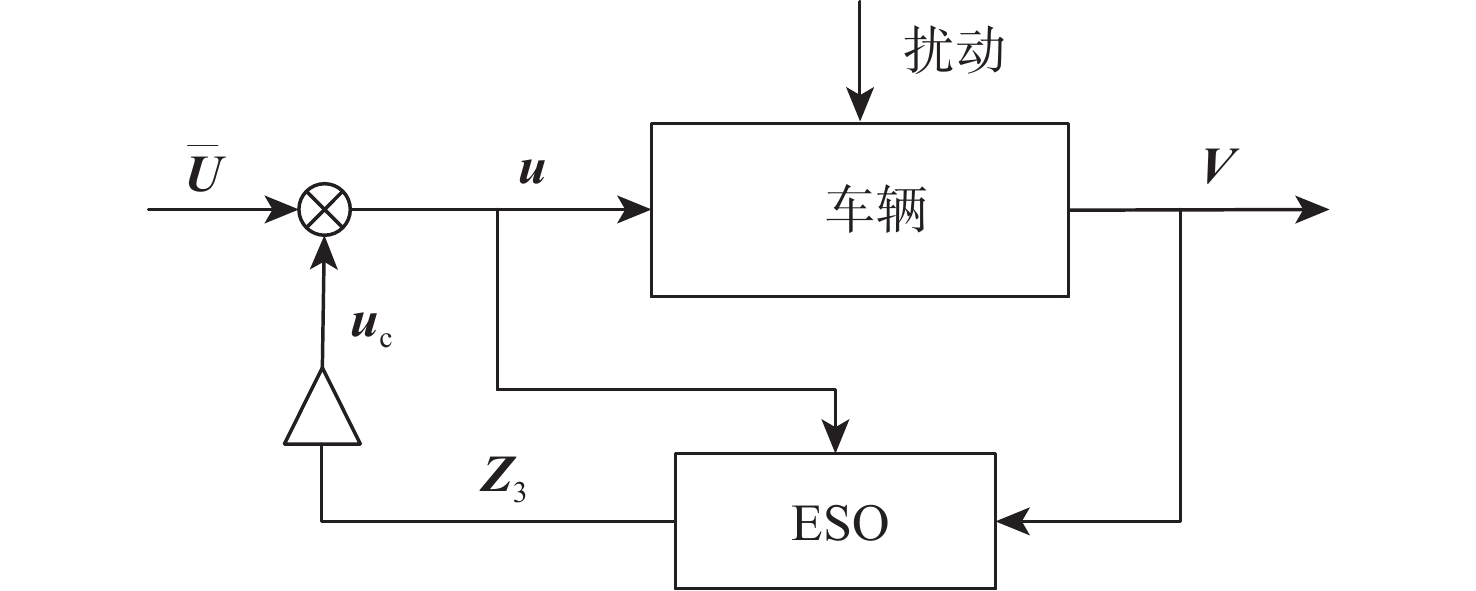
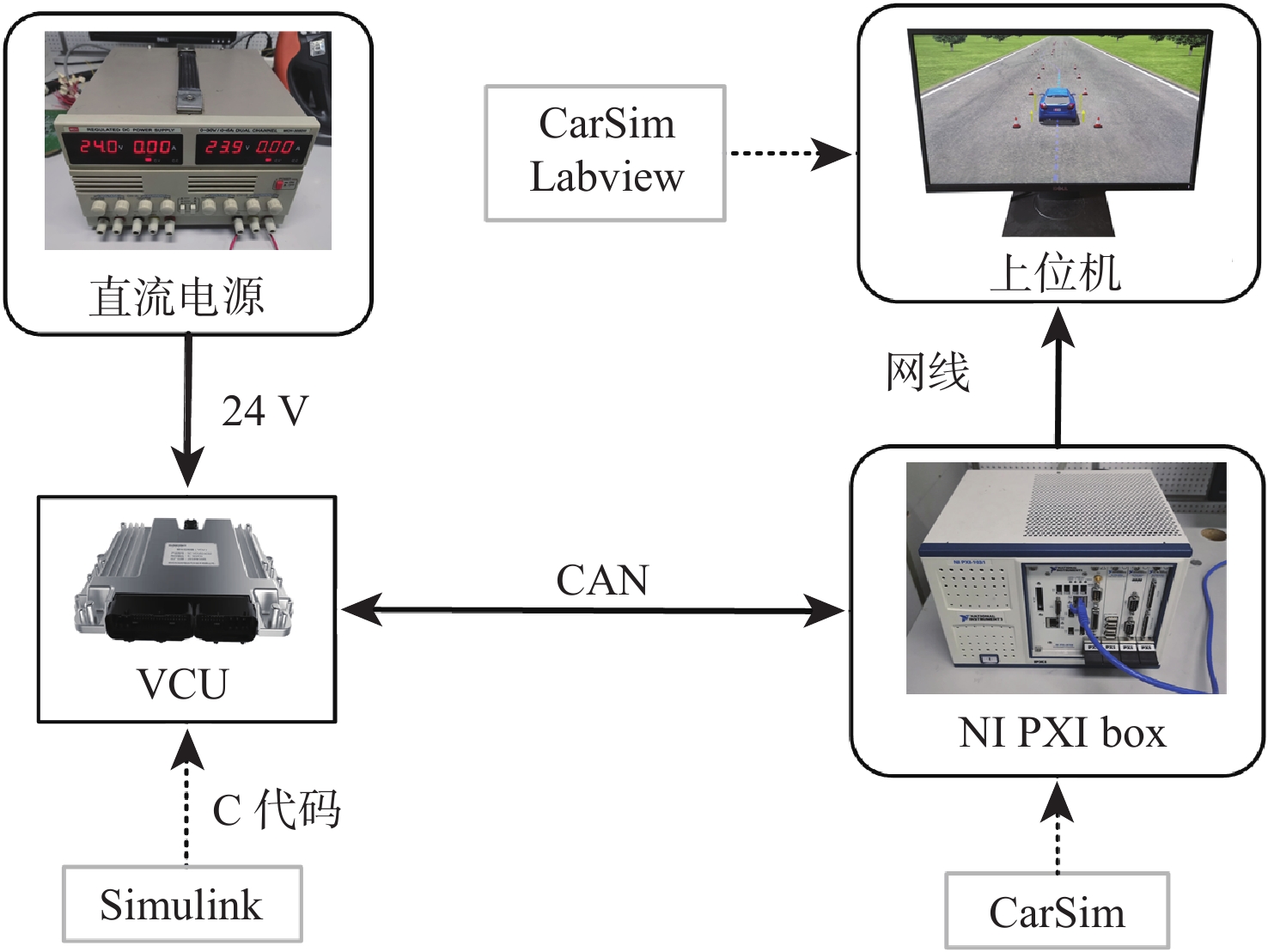
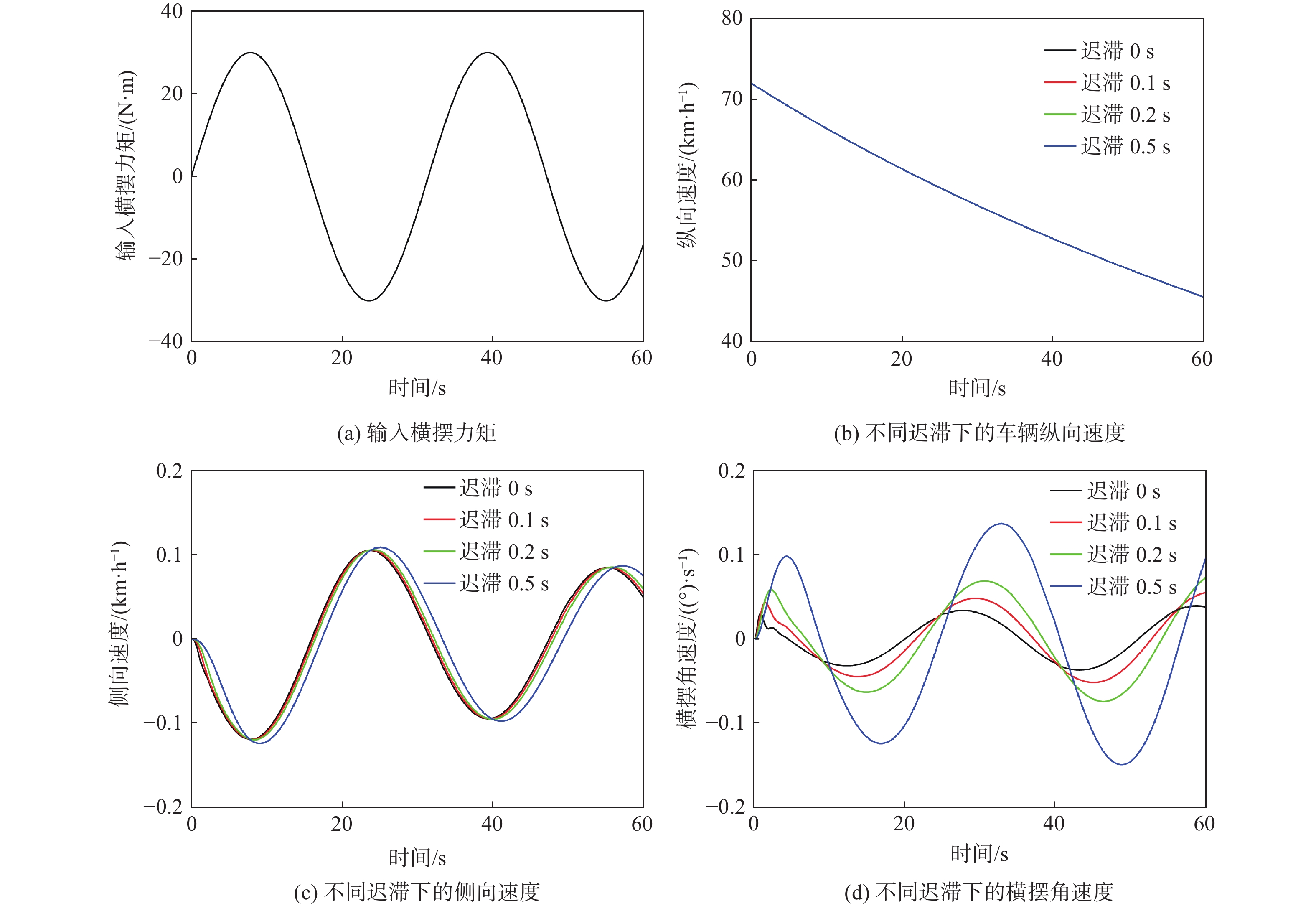
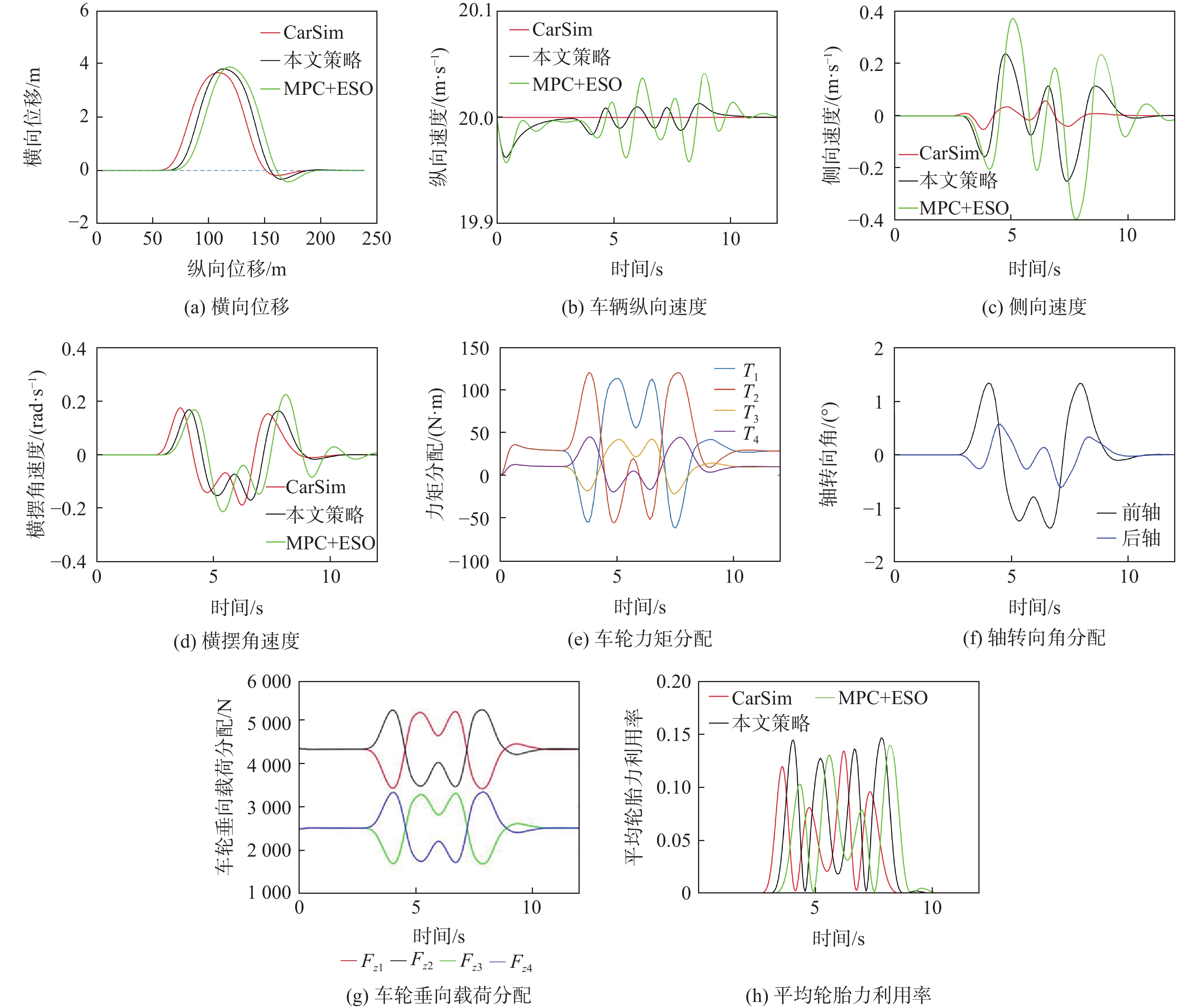
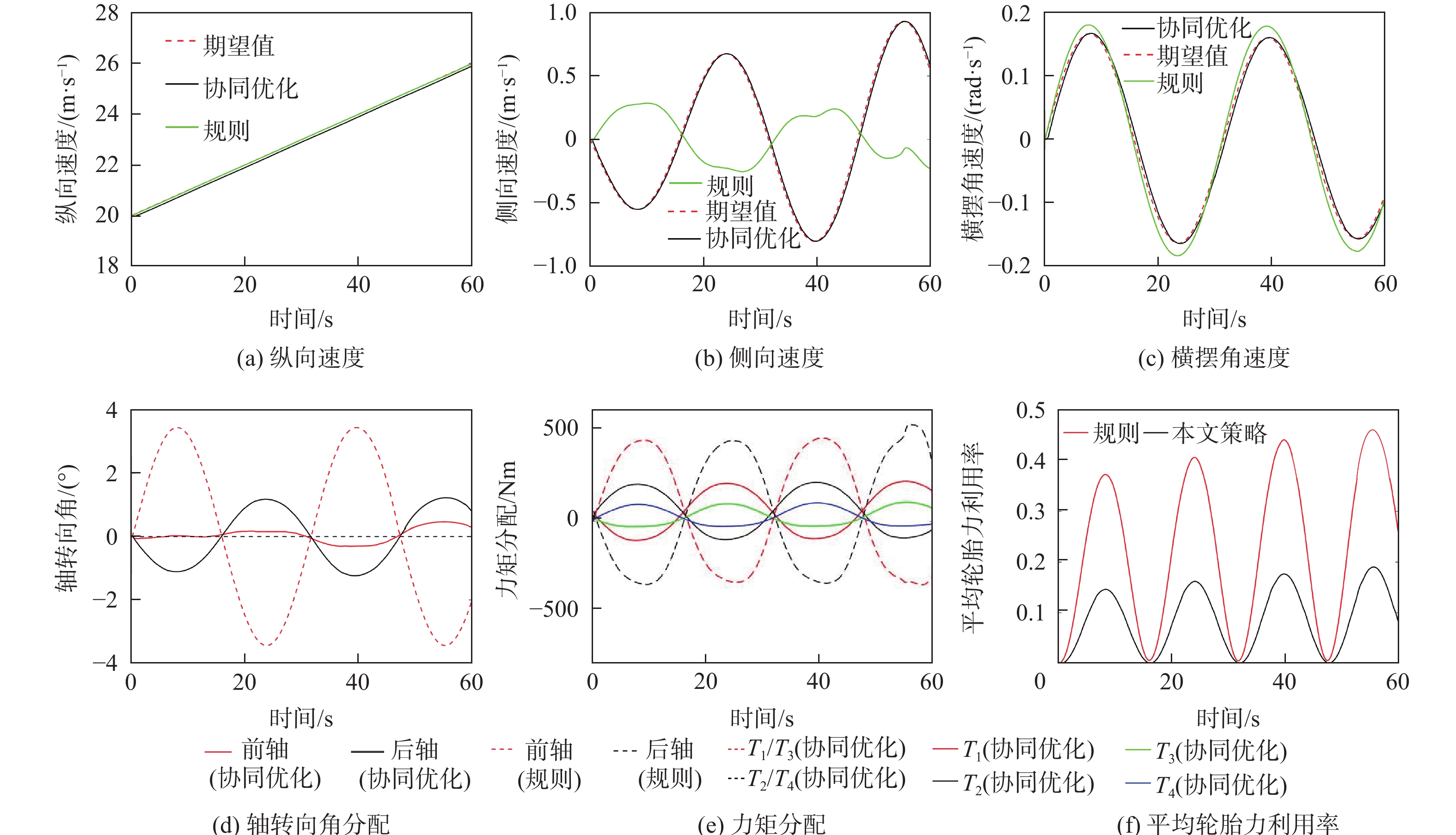
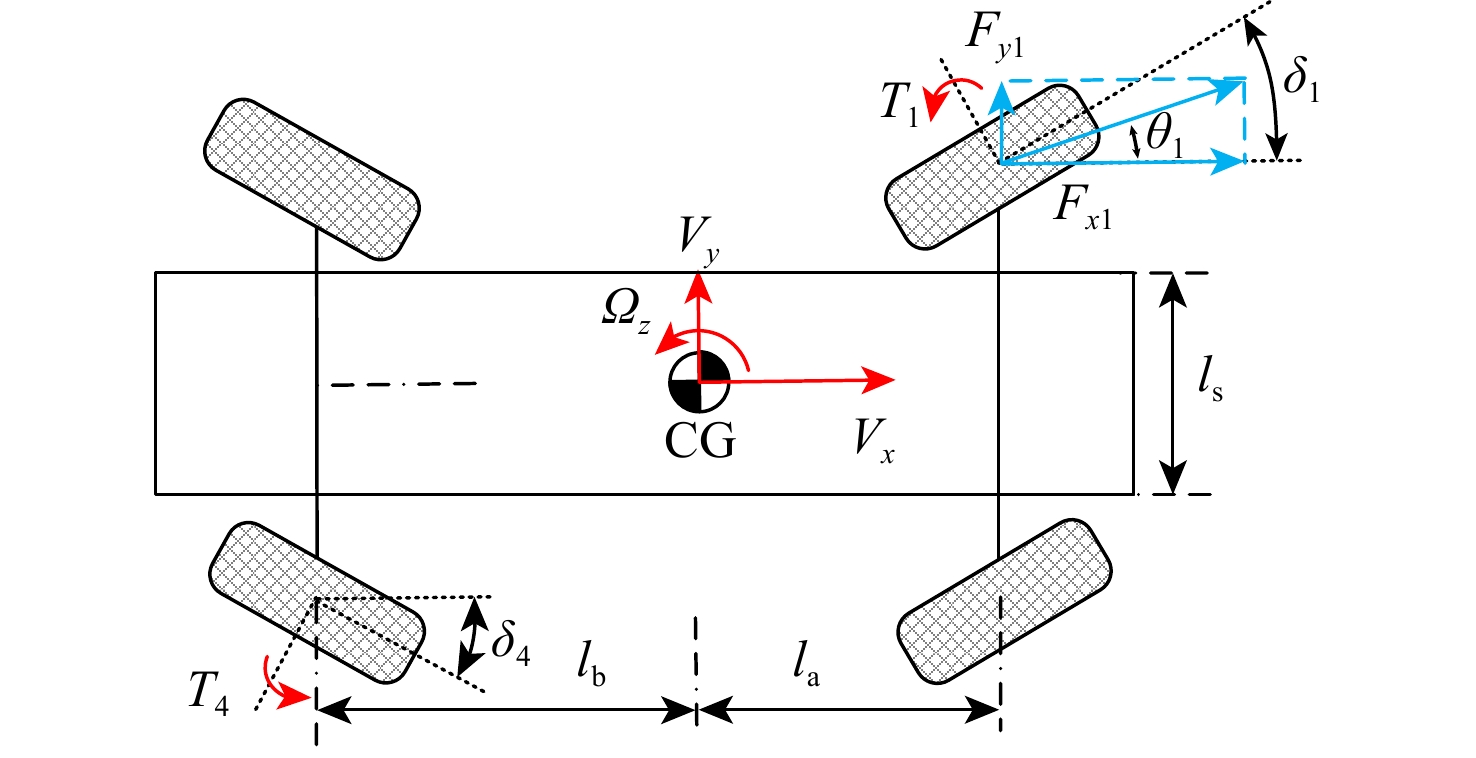
针对分布式驱动车辆平面运动横纵耦合特点及电驱动、轮胎响应延迟特性,提出一种考虑动力系统惯性迟滞、驱动与转向协同分配的安全行驶控制策略。将动力迟滞简化为轮胎力一阶惯性环节,与系统方程联立后建立升阶的车辆平面动力学模型;设计了包含参考状态生成层、轨迹跟踪控制层和控制量最优分配层的分层协同控制算法。使用单轨模型将驾驶员操作指令转译为期望稳态速度;基于抗扰模型预测控制器(DRMPC)设计轨迹跟踪算法,引入集总扩张状态观测器(ESO)进行扰动观测与系统重构,使用模型预测控制器(MPC)生成期望广义纵向力、侧向力和横摆力矩;底层基于系统模型执行控制量分配,通过雅可比线性化将驱动力矩与主动转向角解耦,视为等效控制量参与分配,并以最小轮胎力利用率为目标设计面向行驶安全的驱动/转向协同最优分配算法。处理器在环(PIL)实验表明:动力系统惯性迟滞对车辆运动状态存在影响;与忽略迟滞效应的传统控制策略相比,设计的分层控制策略在双移线工况测试中展现出控制精度和响应速度上的优势,在匀加速正弦转向工况测试中,通过控制力的再分配完成了高精度的平面运动控制,轮胎力利用率仅为传统基于规则分配策略的38.2%。
Abstract:A hierarchical control strategy is proposed for distributed-driven vehicles, taking into account the powertrain dynamical hysteresis and the coordination of motor torques and wheel steerings. This is based on the coupling characteristics of vehicle planar motion in longitudinal, lateral, and yaw directions, as well as the hysteresis characteristics of electric driving and tire response. The dynamic hysteresis is simplified to the first-order inertial term of tire force, and combined with the planar motion model to establish an ascending-order vehicle dynamics model. Then a hierarchical coordinated control strategy is proposed, containing a reference state generator, a feedback trajectory tracking controller, and an optimal control allocator. To be more precise, the top layer uses a single-track model to convert the driver's commands into expected steady-state motion states. Next, the tracking controller is established using disturbance rejection model predictive control (DRMPC), and a lumped extended state observer (ESO) is used for disturbance observation and feedback compensation. A model predictive controller (MPC) is then introduced to produce generalized longitudinal force, lateral force, and yaw moment. Finally, the bottom layer executes optimal control allocation, decoupling motor torques and wheel angles using Jacobi linearization and treating them as equivalent control inputs in the optimal allocation with the goal of minimizing tire force utilization. Processor in the loop (PIL) experiments show that: dynamic hysteresis generates an obvious effect on vehicle planar motion; the proposed hierarchical control strategy presents advantages in control accuracy and response speed in the double-lane-change maneuver compared with conventional control strategy which ignores the hysteresis; in the constant-acceleration-sinusoidal-steering test, the proposed algorithm realizes planar motion control through control force redistribution, and the tire force loading rate is only 38.2% of the traditional rule-based allocation strategy.
-
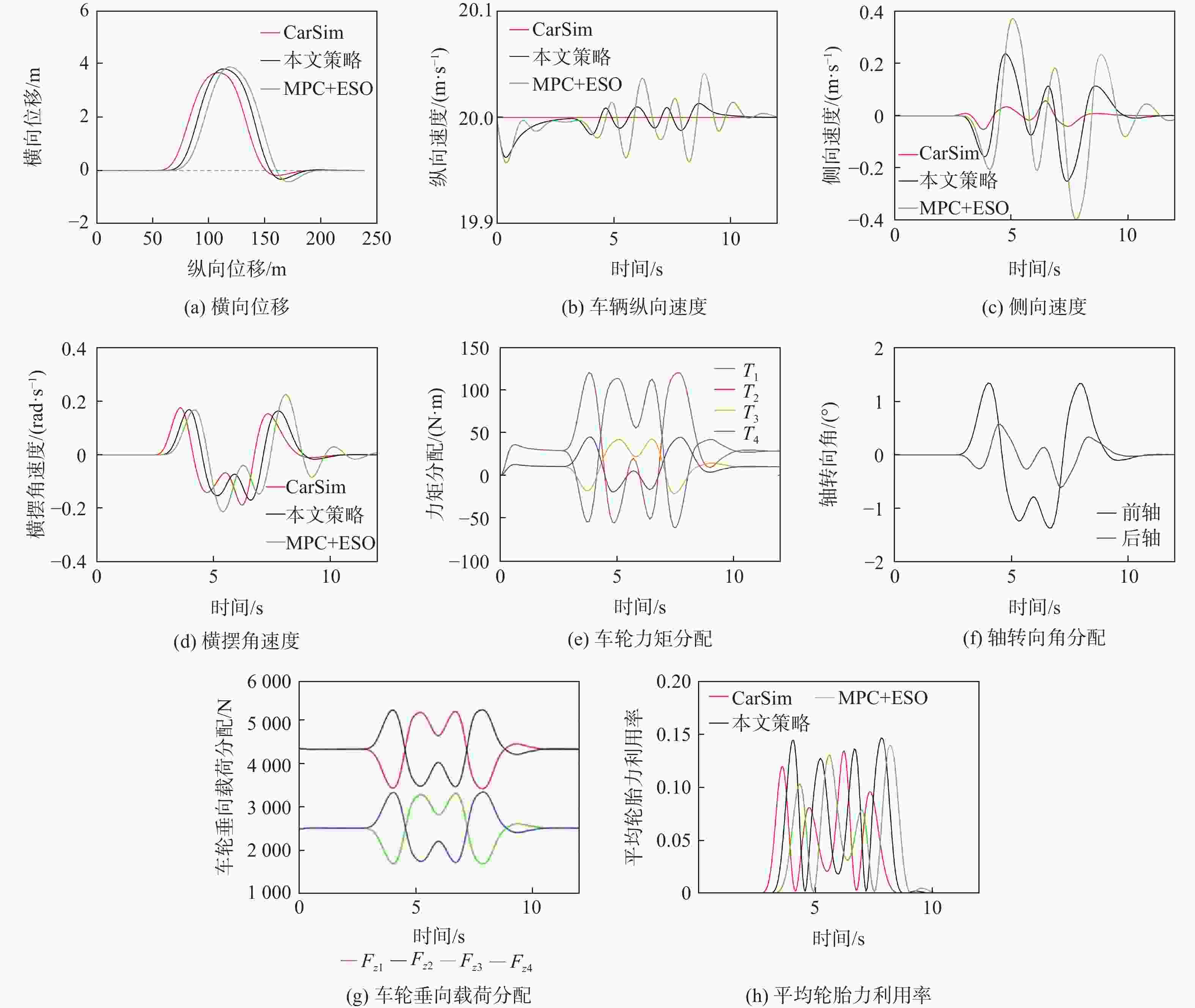
图 7 双移线工况下平面运动控制曲线
Figure 7. Planar motion control curves under double-lane change maneuver
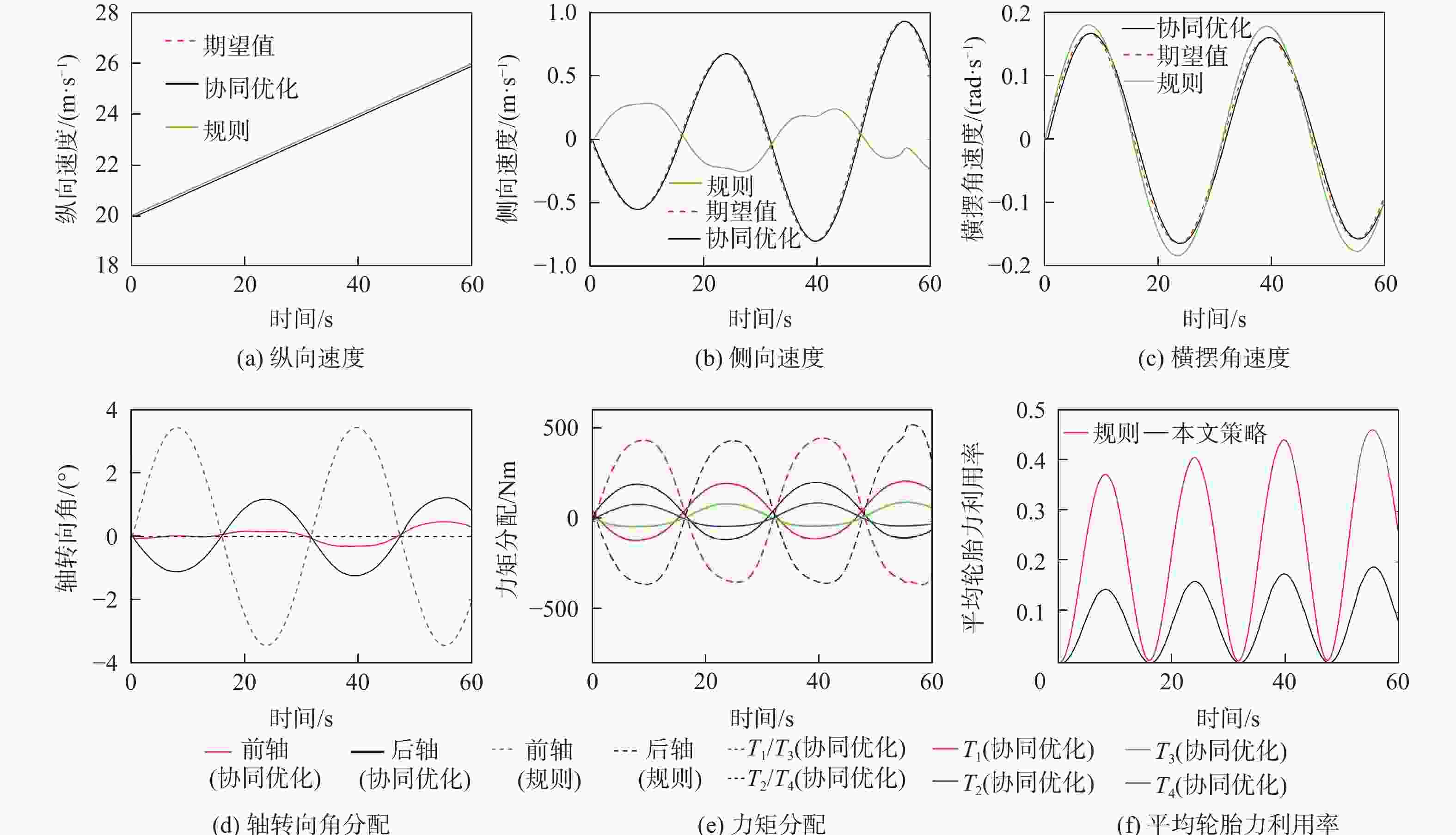
图 8 匀加速正弦转向工况下的控制曲线
Figure 8. Control curves under constant acceleration & sinusoidal steering maneuver
表 1 车体参数
Table 1. Vehicle parameters
m/kg Iz/(kg·m2) lf1/m lf2/m lf3/m lf4/m ls/m Reff/m Cα h/m 1460 2500 1.015 1.015 −1.9 −1.9 0.96 0.325 2.1×104 0.54  下载: 导出CSV
下载: 导出CSV
表 2 控制参数
Table 2. Controller parameters
参数 数值 ωo 10 p 4 Q diag{[2×102, 4×102, 2×103,1,1,1]}×6×103 R diag{[2,1,1]}×10−1 [axmax ,aymax ,azmax] [5 m/s2,1 m/s2,5 rad/s2] [Vxmax, Vymax, Ωzmax] [30 m/s,5 m/s,2 rad/s] kmax 5×102×[1,1,1,1,0.01,0.01]
下载: 导出CSV
-
[1] HORI Y. Future vehicle driven by electricity and control-research on four-wheel-motored “UOT electric March II”[J]. IEEE Transactions on Industrial Electronics, 2004, 51(5): 954-962. doi: 10.1109/TIE.2004.834944 [2] VAEZ S, JOHN V I, RAHMAN M A. Energy saving vector control strategies for electric vehicle motor drives[C]//Proceedings of the Power Conversion Conference. Piscataway: IEEE Press, 1997: 13-18. [3] SHINO M. Yaw-moment control of electric vehicle for improving handling and stability[J]. JSAE Review, 2001, 22(4): 473-480. doi: 10.1016/S0389-4304(01)00130-8 [4] HSU Y H , GERDES J C. Stabilization of a steer-by-wire vehicle at the limits of handling using feedback linearization[C]//Proceedings of the International Mechanical Engineering Congress and Exposition. New York: ASME, 2008: 483-492. [5] DING N G, TAHERI S. An adaptive integrated algorithm for active front steering and direct yaw moment control based on direct Lyapunov method[J]. Vehicle System Dynamics, 2010, 48(10): 1193-1213. doi: 10.1080/00423110903377360 [6] CHATZIKOMIS C, SORNIOTTI A, GRUBER P, et al. Comparison of path tracking and torque-vectoring controllers for autonomous electric vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(4): 559-570. doi: 10.1109/TIV.2018.2874529 [7] 余卓平, 杨鹏飞, 熊璐. 控制分配理论在车辆动力学控制中的应用[J]. 机械工程学报, 2014, 50(18): 99-107. doi: 10.3901/JME.2014.18.099YU Z P, YANG P F, XIONG L. Application of control allocation in distributed drive electric vehicle[J]. Journal of Mechanical Engineering, 2014, 50(18): 99-107(in Chinese). doi: 10.3901/JME.2014.18.099 [8] WANG J M, LONGORIA R G. Coordinated vehicle dynamics control with control distribution[C]//Proceedings of the American Control Conference. Piscataway: IEEE Press, 2006: 6. [9] DE NOVELLIS L, SORNIOTTI A, GRUBER P. Wheel torque distribution criteria for electric vehicles with torque-vectoring differentials[J]. IEEE Transactions on Vehicular Technology, 2014, 63(4): 1593-1602. doi: 10.1109/TVT.2013.2289371 [10] 余卓平, 冯源, 熊璐. 分布式驱动电动汽车动力学控制发展现状综述[J]. 机械工程学报, 2013, 49(8): 105-114. doi: 10.3901/JME.2013.08.105YU Z P, FENG Y, XIONG L. Review on vehicle dynamics control of distributed drive electric vehicle[J]. Journal of Mechanical Engineering, 2013, 49(8): 105-114(in Chinese). doi: 10.3901/JME.2013.08.105 [11] HAJILOO R, KHAJEPOUR A, ZENGIN H, et al. A coupled force predictive control of vehicle stability using front/rear torque allocation with experimental verification[J]. Vehicle System Dynamics, 2022, 60(7): 2541-2563. doi: 10.1080/00423114.2021.1912363 [12] KAPANIA N R, GERDES J C. Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling[J]. Vehicle System Dynamics, 2015, 53(12): 1687-1704. doi: 10.1080/00423114.2015.1055279 [13] HU Y, ZHANG X Z, WANG Y N. Design of vehicle stability control of distributed-driven electric vehicle based on optimal torque allocation[C]//Proceedings of the 33rd Chinese Control Conference. Piscataway: IEEE Press, 2014: 195-200. [14] YU Z P, LENG B, XIONG L, et al. Direct yaw moment control for distributed drive electric vehicle handling performance improvement[J]. Chinese Journal of Mechanical Engineering, 2016, 29(3): 486-497. doi: 10.3901/CJME.2016.0314.031 [15] ASIABAR A N, KAZEMI R. A direct yaw moment controller for a four in-wheel motor drive electric vehicle using adaptive sliding mode control[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-Body Dynamics, 2019, 233(3): 549-567. doi: 10.1177/1464419318807700 [16] YU Z P, HOU Y Y, LENG B, et al. Disturbance compensation and torque coordinated control of four In-wheel motor independent-drive electric vehicles[J]. IEEE Access, 2020, 8: 119758-119767. doi: 10.1109/ACCESS.2020.3005943 [17] LIU M C, ZHANG C N, WANG Z F. Dynamics modelling and simulation on four-axle vehicle driven by in-wheel motors[J]. Transactions of Beijing Institute of Technology, 2014, 34(2): 143-147. [18] HU J Y, LI J Q, HU Z Y, et al. Energy-efficient torque-allocation strategy for a 6×6 vehicle using electric wheels[J]. eTransportation, 2021, 10: 100136. doi: 10.1016/j.etran.2021.100136 [19] GUO N Y, ZHANG X D, ZOU Y, et al. A fast model predictive control allocation of distributed drive electric vehicles for tire slip energy saving with stability constraints[J]. Control Engineering Practice, 2020, 102: 104554. doi: 10.1016/j.conengprac.2020.104554 [20] ZHANG Y T, NI J, TIAN H Q, et al. Integrated robust dynamics control of all-wheel-independently-actuated unmanned ground vehicle in diagonal steering[J]. Mechanical Systems and Signal Processing, 2022, 164: 108263. doi: 10.1016/j.ymssp.2021.108263 [21] NI J, HU J B, XIANG C L. Envelope control for four-wheel independently actuated autonomous ground vehicle through AFS/DYC integrated control[J]. IEEE Transactions on Vehicular Technology, 2017, 66(11): 9712-9726. doi: 10.1109/TVT.2017.2723418 [22] WANG Q W, ZHAO Y Q, DENG Y J, et al. Optimal coordinated control of ARS and DYC for four-wheel steer and in-wheel motor driven electric vehicle with unknown tire model[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10809-10819. doi: 10.1109/TVT.2020.3012962 [23] 梁艺潇, 李以农, KHAJEPOUR A, 等. 基于转向与主动横摆力矩协调的四轮驱动智能电动汽车路径跟踪控制[J]. 机械工程学报, 2021, 57(6): 142-155. doi: 10.3901/JME.2021.06.142LIANG Y X, LI Y N, KHAJEPOUR A, et al. Path following control for four-wheel drive electric intelligent vehicle based on coordination between steering and direct yaw moment system[J]. Journal of Mechanical Engineering, 2021, 57(6): 142-155(in Chinese). doi: 10.3901/JME.2021.06.142 [24] ZHANG X Z, WEI K X, YUAN X F, et al. Optimal torque distribution for the stability improvement of a four-wheel distributed-driven electric vehicle using coordinated control[J]. Journal of Computational and Nonlinear Dynamics, 2016, 11(5): 051017. doi: 10.1115/1.4033004 [25] 林程, 梁晟, 宫新乐, 等. 面向极限工况的分布式驱动电动汽车动力学集成控制方法[J]. 汽车工程, 2022, 44(9): 1372-1385.LIN C, LIANG S, GONG X L, et al. Integrated dynamic control strategy for extreme maneuvers of 4WIDEVs[J]. Automotive Engineering, 2022, 44(9): 1372-1385(in Chinese). [26] SHUAI Z B, LI C M, GAI J T, et al. Coordinated motion and powertrain control of a series-parallel hybrid 8×8 vehicle with electric wheels[J]. Mechanical Systems and Signal Processing, 2019, 120: 560-583. doi: 10.1016/j.ymssp.2018.10.033 [27] CHEN W W, LIANG X T, WANG Q D, et al. Extension coordinated control of four wheel independent drive electric vehicles by AFS and DYC[J]. Control Engineering Practice, 2020, 101: 104504. doi: 10.1016/j.conengprac.2020.104504 [28] 张海军, 万少华, 张明杰. 基于自抗扰控制的轮毂电机驱动电动汽车耦合振动抑制[J]. 汽车技术, 2023(5): 8-14.ZHANG H J, WAN S H, ZHANG M J. Coupling vibration suppression of in-wheel motor electric vehicle based on active disturbance rejection control[J]. Automobile Technology, 2023(5): 8-14(in Chinese). [29] 彭晓燕, 邢星飞, 崔庆佳, 等. 分布式电动汽车驱动力分配控制方法研究[J]. 汽车工程, 2022, 44(7): 1059-1068.PENG X Y, XING X F, CUI Q J, et al. Research on driving force distribution control method of distributed electric vehicles[J]. Automotive Engineering, 2022, 44(7): 1059-1068(in Chinese). [30] LU H Y, LU J W, WEI H, et al. Investigation of dynamical stability of vehicle lateral motion control system with feedback delay[J]. Scientia Sinica Technologica, 2022, 52(10): 1608-1622. doi: 10.1360/SST-2021-0527 [31] 王喆, 周晓军, 杨辰龙, 等. 驾驶员制动意图对多轴车辆紧急制动迟滞特性的影响[J]. 汽车工程, 2018, 40(10): 1185-1191.WANG Z, ZHOU X J, YANG C L, et al. Effects of driver’s braking intention on hysteresis characteristics of emergency braking in multi-axle vehicle[J]. Automotive Engineering, 2018, 40(10): 1185-1191(in Chinese). [32] YUE W, GUO G. Guaranteed cost adaptive control of nonlinear platoons with actuator delay[J]. Journal of Dynamic Systems, Measurement, and Control, 2012, 134(5): 78-86. [33] 石晓辉, 曾键, 蒋欣, 等. 轮胎模型动态特性及参数分析[J]. 重庆理工大学学报(自然科学版), 2020, 34(1): 1-8.SHI X H, ZENG J, JIANG X, et al. Dynamic characteristics and parameter analysis of tire model[J]. Journal of Chongqing University of Technology (Natural Science), 2020, 34(1): 1-8(in Chinese). [34] 高峰, 肖凌云, 王江峰. 基于迟滞鲁棒性的自动车队队列稳定性控制[J]. 北京航空航天大学学报, 2010, 36(10): 1153-1157.GAO F, XIAO L Y, WANG J F. Lag-delay robust string stable control of platoon of automated vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(10): 1153-1157 (in Chinese). [35] 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.HAN J Q. Active disturbance rejection control technique[M]. Beijing: National Defense Industry Press, 2008(in Chinese). [36] WINSTEAD V, KOLMANOVSKY I V. Estimation of road grade and vehicle mass via model predictive control[C]//Proceedings of the IEEE Conference on Control Applications. Piscataway: IEEE Press, 2005: 1588-1593. [37] JING H H, JIA F J, LIU Z Y. Multi-objective optimal control allocation for an over-actuated electric vehicle[J]. IEEE Access, 2018, 6: 4824-4833. [38] 白锦洋, 吴学雷, 高峰, 等. 多轴车辆动力传动系统建模与仿真[J]. 北京航空航天大学学报, 2017, 43(1): 136-143.BAI J Y, WU X L, GAO F, et al. Modeling and simulation of multi-axle vehicle powertrain system[J]. Journal of Beiging University of Aweonatics and Astronautics, 2017, 43(1): 136-143(in Chinese). [39] 程洪杰, 杨健福, 刘志浩, 等. 基于规则的多轴特种车辆稳定性集成控制[J]. 北京航空航天大学学报, 2024, 50(6): 1794-1805.CHENG H J, YANG J F, LIU Z H, et al. Rule-based integrated stability control of multi-axle special vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(6): 1794-1805 (in Chinese). [40] 殷国栋, 金贤建, 张云. 分布式驱动电动汽车底盘动力学控制研究综述[J]. 重庆理工大学学报(自然科学版), 2016, 30(8): 13-19.YIN G D, JIN X J, ZHANG Y. Overview for chassis vehicle dynamics control of distributed drive electric vehicle[J]. Journal of Chongqing University of Technology (Natural Science), 2016, 30(8): 13-19(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 195
- HTML全文浏览量: 85
- PDF下载量: 0
- 被引次数: 0
