



-
摘要:
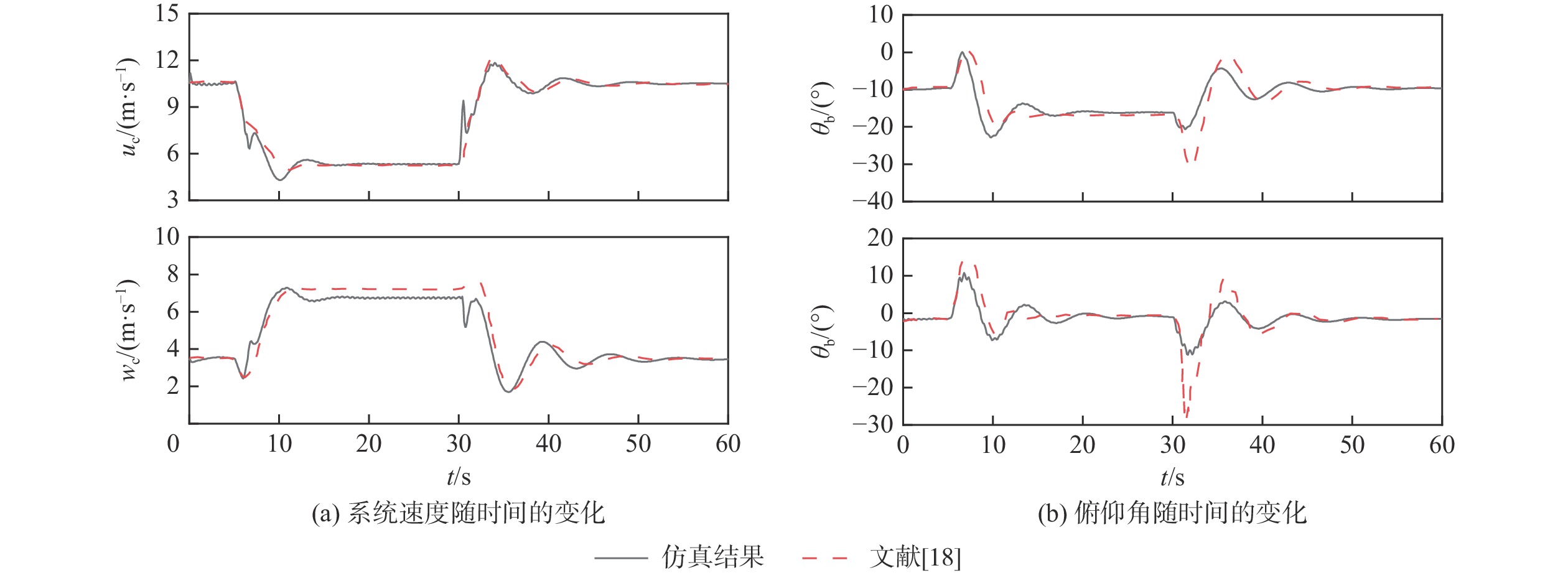
为获得操纵方式对翼伞系统雀降性能的影响规律,建立了翼伞系统两体9自由度动力学模型,采用龙格库塔法进行了动力学编程计算,系统速度、翼伞及载荷姿态的数值结果和文献规律一致,最大误差为8.2%。开展了分级操纵及操纵速度对翼伞系统雀降性能的影响研究,得到了翼伞最小水平速度、最小垂直速度及最大迎角的变化规律。研究结果表明:一次操纵的雀降性能优于分级操纵;操纵时间过长或过短均会导致垂直速度增加;采用“先快后慢”和“匀速下拉”均能保证良好的雀降性能,操纵速度的选择应同时考虑最小垂直速度及翼伞飞行的稳定性。
Abstract:A two-body 9-degree of freedom (DOF) dynamics model of the parafoil system was established, and the Runge-Kutta method was used for dynamic programming calculation. The numerical results of the system velocities and parafoil and load attitudes were consistent with the results in the literature, and the maximum error was 8.2%. On this basis, the influence of hierarchical maneuvering and maneuvering velocity on the flared landing performance of the parafoil system was investigated. The variations of minimum horizontal velocity, minimum vertical velocity, and maximum angle of attack of parafoil were obtained. The results show that the flared landing performance under one-time maneuvering is better than that under hierarchical maneuvering. If the maneuvering duration is too long or too short, the vertical velocity will increase. Both maneuverings featuring first accelerating and then decelerating and constant velocity can ensure good flared landing performance. The minimum vertical velocity and the flight stability of the parafoil should both be considered in the selection of the maneuvering velocity.
-
Key words:
- parafoil /
- flared landing performance /
- 9-DOF model /
- maneuvering modes /
- maneuvering velocity
-
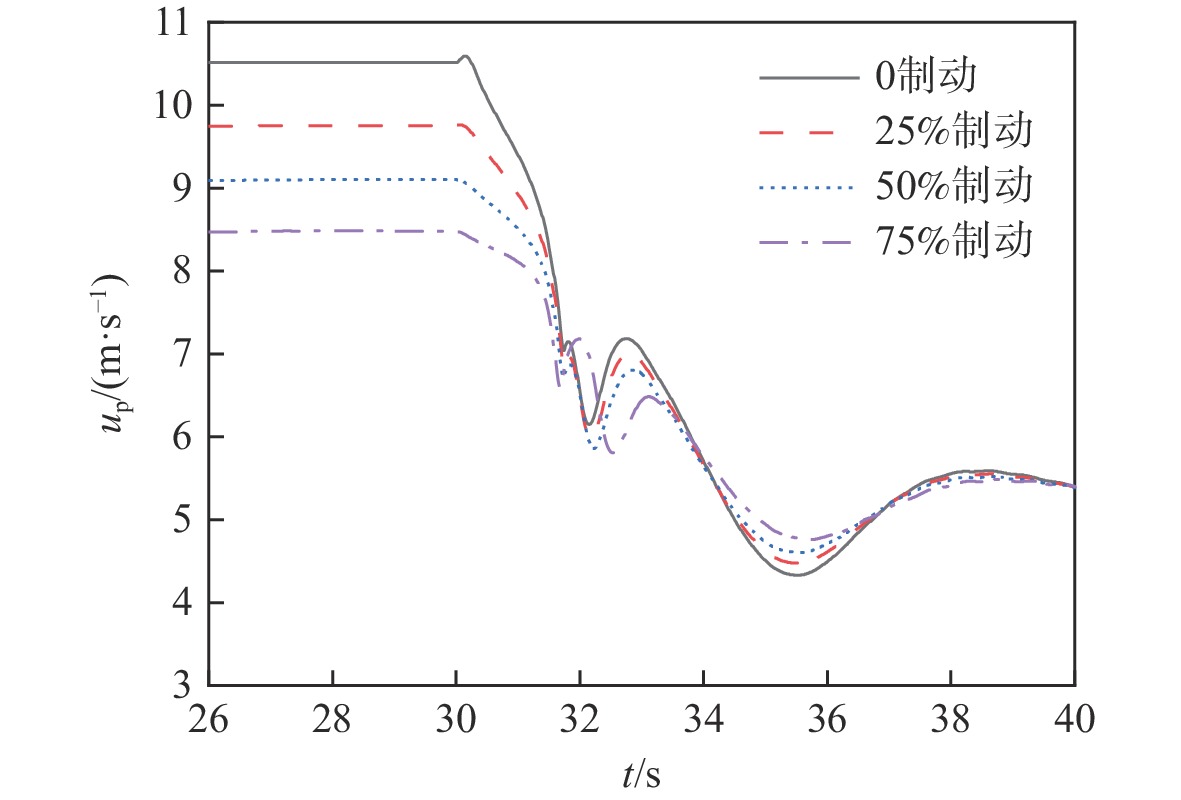
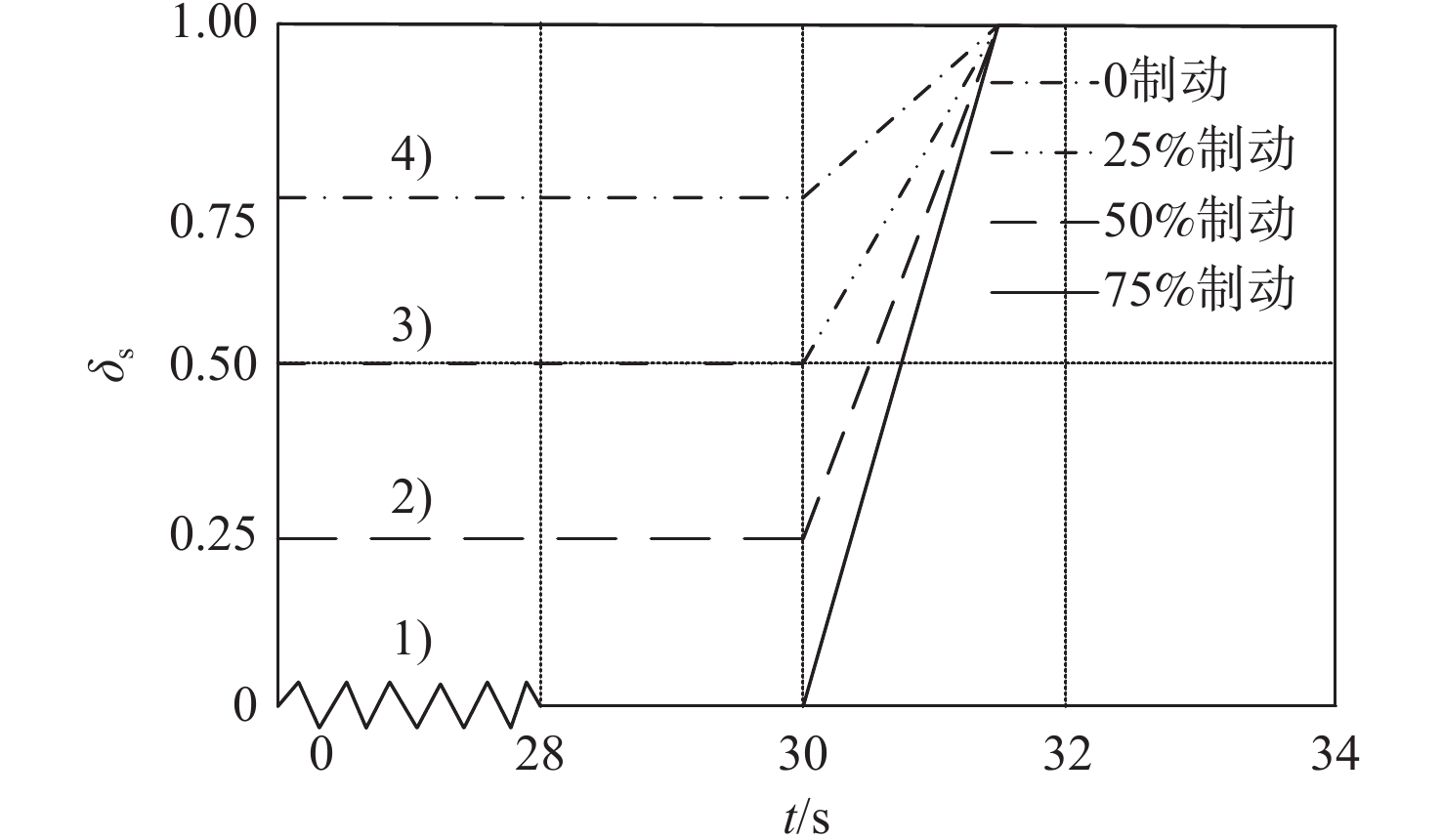
图 5 不同分级操纵制动量下翼伞水平速度变化
Figure 5. Variation of horizontal velocity of parafoil under different hierarchical maneuvering conditions
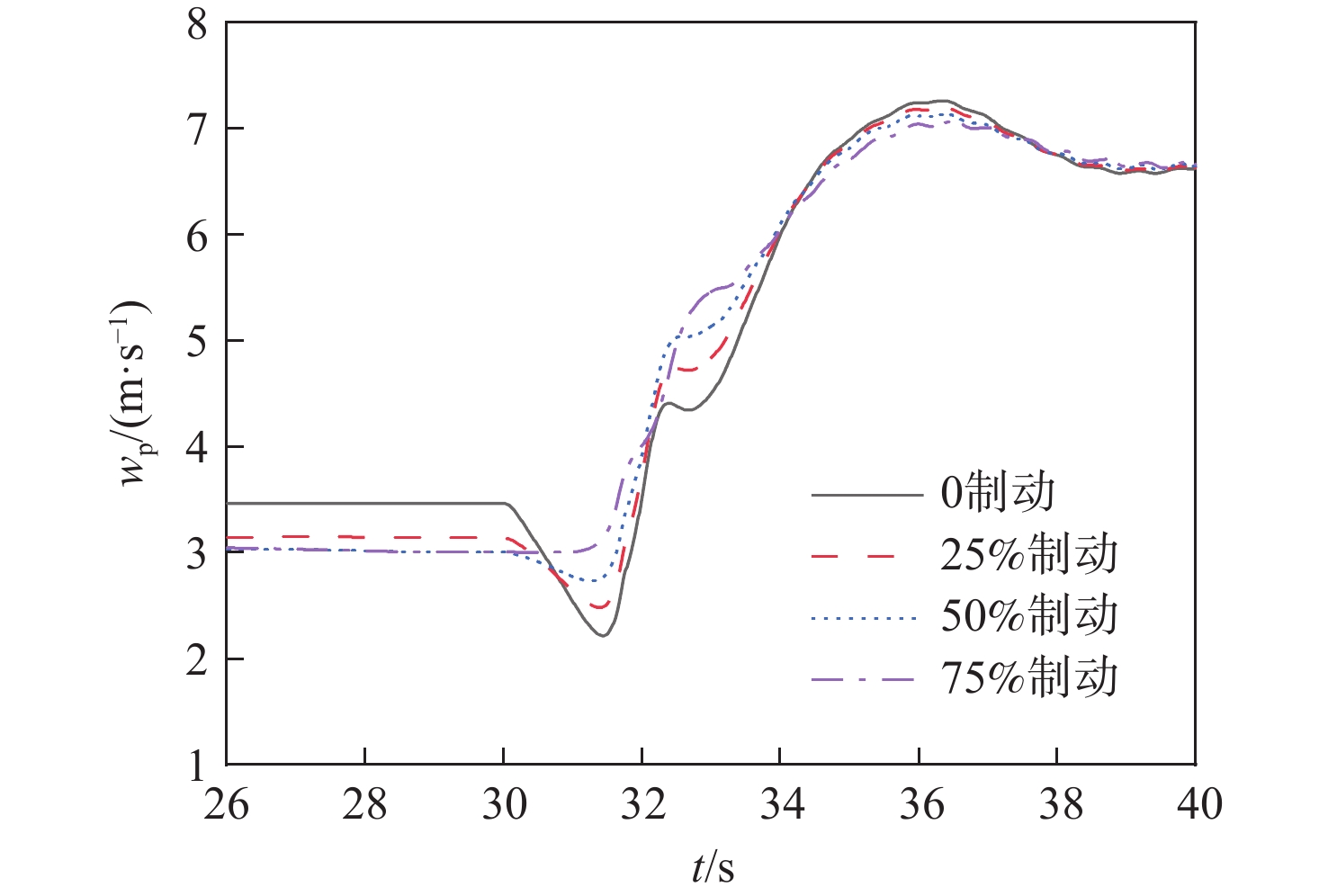
图 6 不同分级操纵制动量下翼伞垂直速度变化
Figure 6. Variation of vertical velocity of parafoil under different hierarchical maneuvering conditions
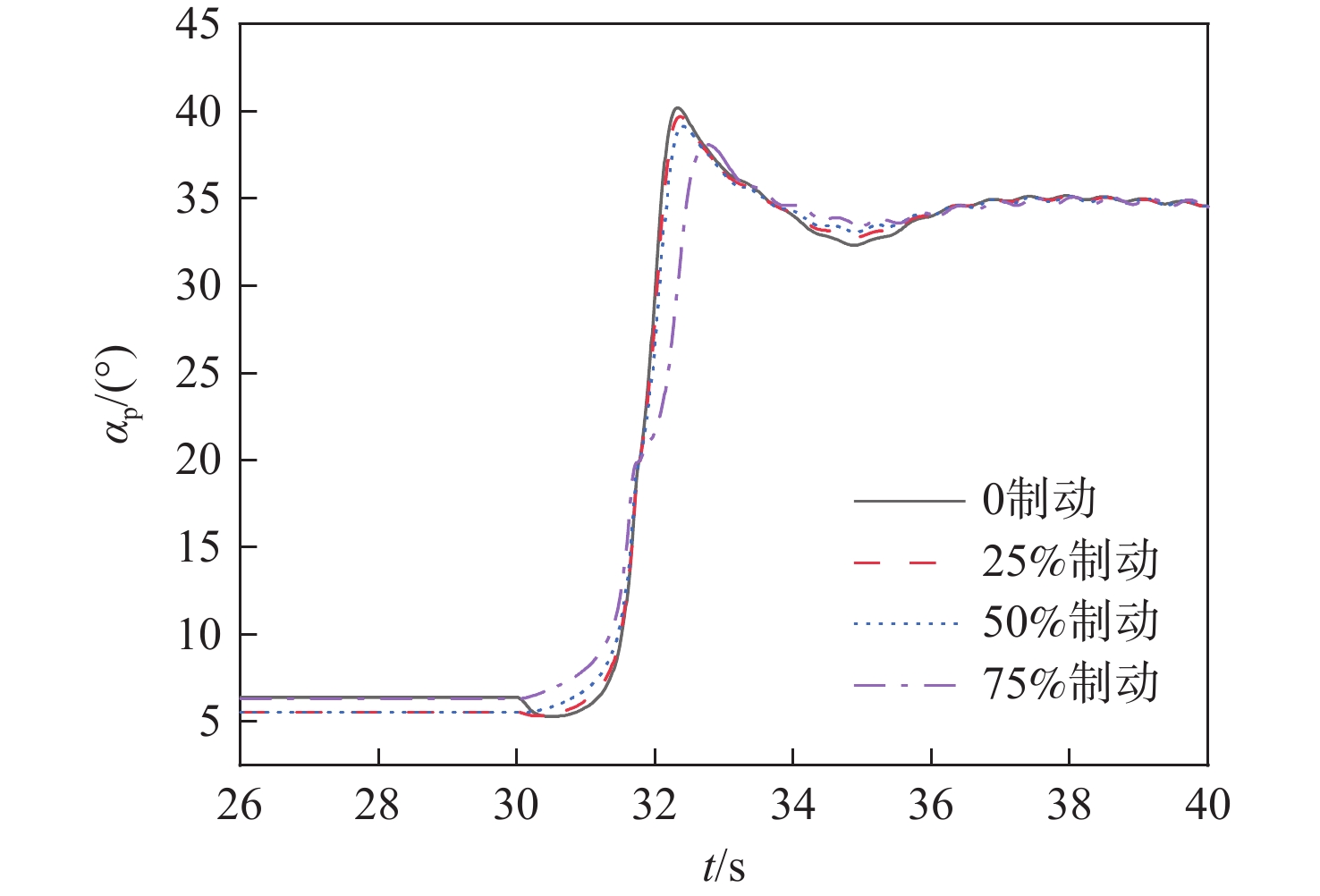
图 7 不同分级操纵制动量下翼伞迎角变化
Figure 7. Variation of angle of attack of parafoil under different hierarchical maneuvering conditions
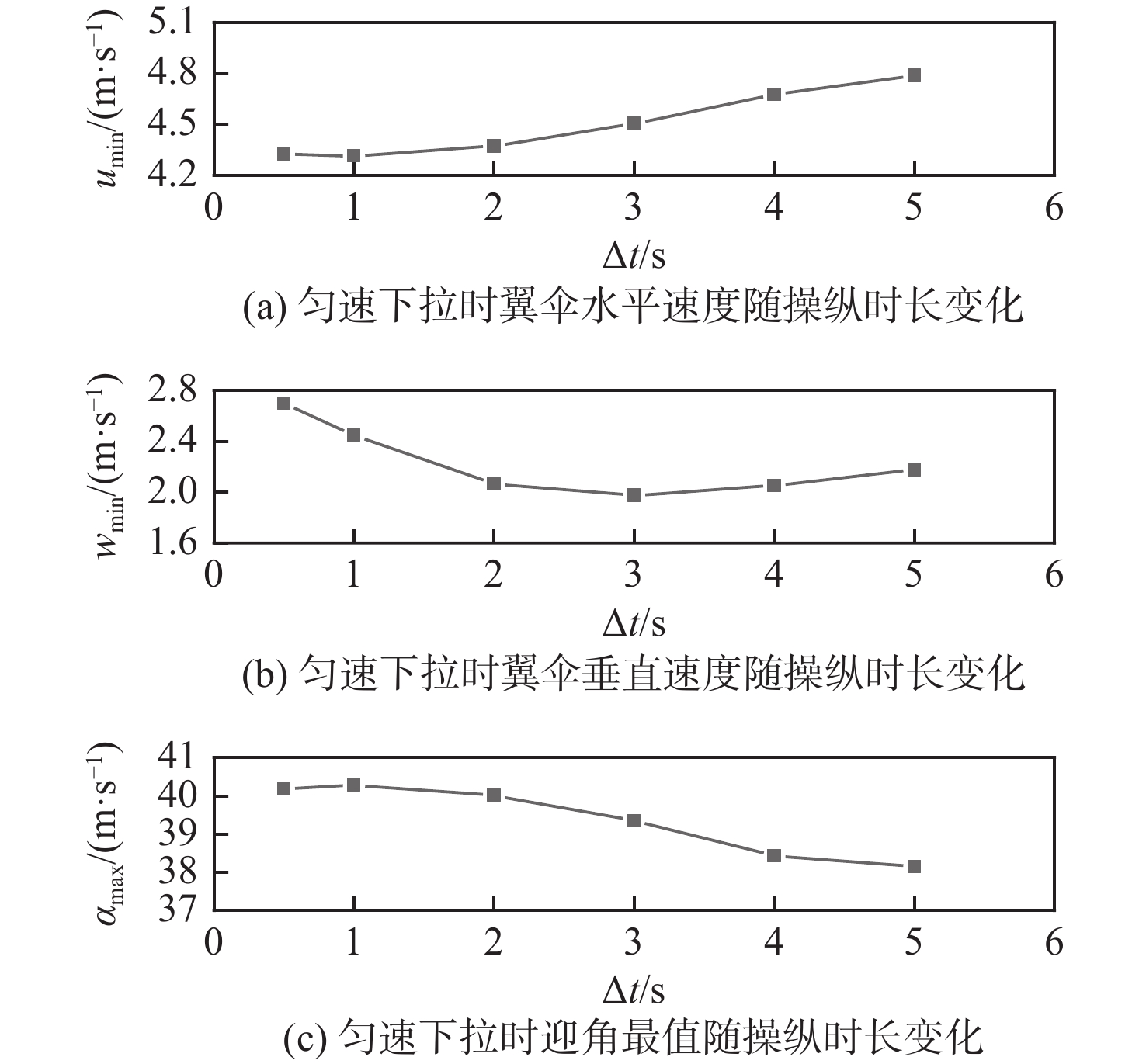
图 8 匀速下拉时翼伞速度、攻角最值随操纵时长变化
Figure 8. Variation of velocity and angle of attack of parafoil with maneuvering durations under constant velocity
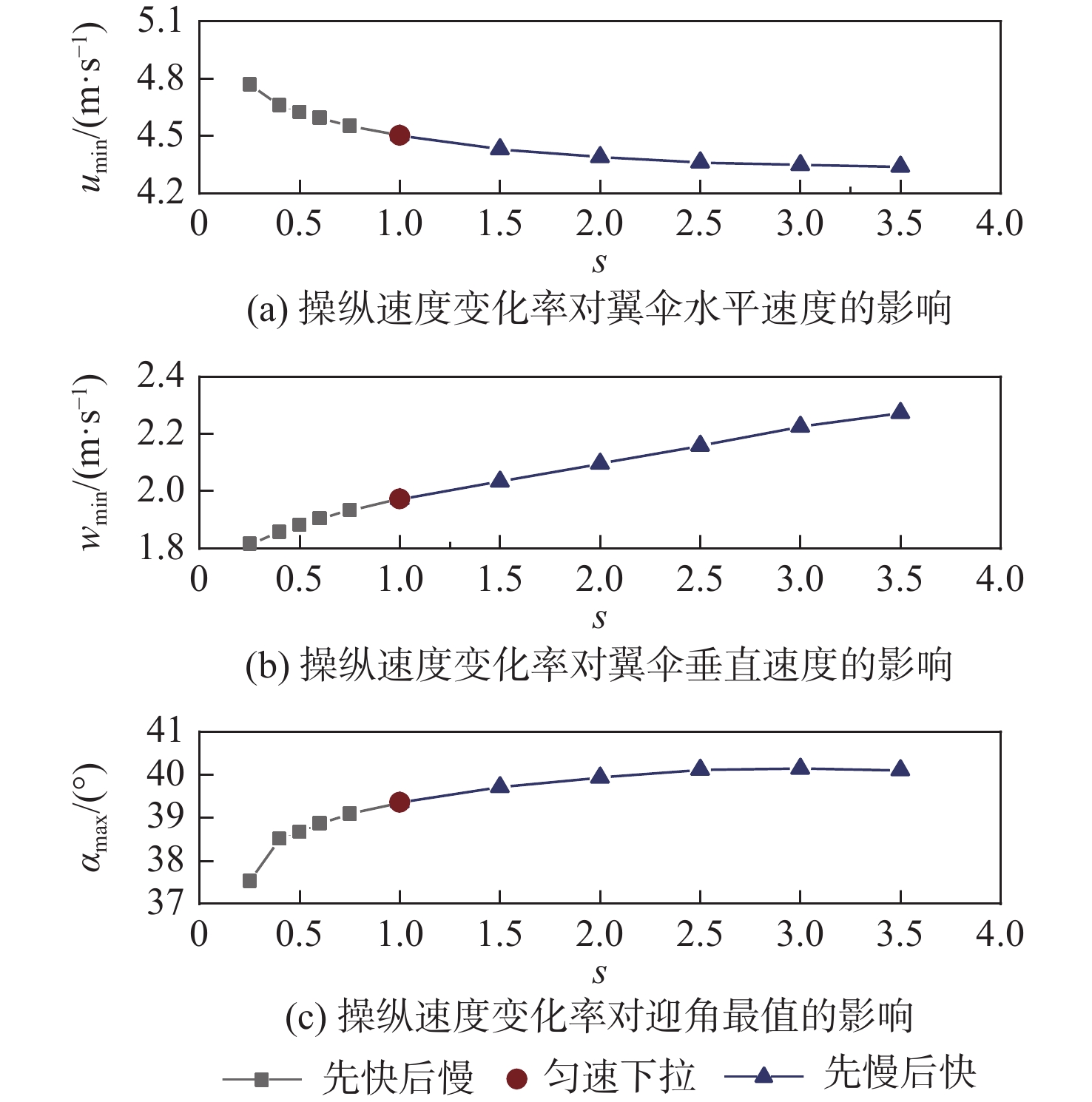
图 9 变速下拉时操纵速度变化率对翼伞速度、攻角最值的影响
Figure 9. Influence of variation of maneuvering velocity on velocity and angle of attack of parafoil under changin velocity
表 1 翼伞系统结构参数
Table 1. Structural parameters of parafoil system
展长
b/m弦长
c/m切口高度
e/m翼伞质量
mp/kg载荷质量
mb/kg伞衣有效
面积Sp/m2载荷有效
面积Sb/m2翼伞中心与系统
质心距离Rp/m载荷中心与系统
质心距离Rb/m安装角
μ/(°)7.5 3.75 0.675 5 135 28 0.5 −7.5 0.5 9  下载: 导出CSV
下载: 导出CSV
表 2 初始运动状态参数
Table 2. Initial motion state parameters
(uc,vc,wc)/(m·s−1) (φp,θp,ϕp)/(°) (x,y,z)/m (10.5,0,3.5) (0,−10,0) (0,0,− 1000 )
下载: 导出CSV
表 3 本文和文献翼伞系统稳定运动特性对比
Table 3. Comparison of stable motion characteristics of parafoil systems in this paper and in literature
运动阶段 uc/(m·s−1) uc本文相对
文献误差/%wc/(m·s−1) wc本文相对
文献误差/%滑翔比 滑翔比本文相对
文献误差/%文献 本文 文献 本文 文献 本文 滑翔阶段
(0~5 s, 50~60 s)10.50 10.52 0.2 3.50 3.53 0.9 3.00 2.98 0.7 雀降阶段
(20~30 s)5.25 5.31 1.1 7.20 6.75 6.3 0.73 0.79 8.2
下载: 导出CSV
表 4 不同操纵方式下翼伞速度、迎角最值
Table 4. Extreme values of velocity and angle of attack of parafoil under different maneuvering conditions
操纵方式 umin/(m·s−1) wmin/(m·s−1) αmax/(°) 0制动(一次操纵) 4.33 2.22 40.18 25%制动 4.48 2.48 39.69 50%制动 4.6 2.73 39.14 75%制动 4.76 3 38.07
下载: 导出CSV
表 5 操纵方式对比工况
Table 5. Comparison of maneuvering conditions
操纵方式 Δt/s s 匀速下拉 0.5,1,2,3,4,5 1 先快后慢 3 0.25,0.4,0.5,0.6,0.75 先慢后快 3 1.5,2,2.5,3,3.5
下载: 导出CSV
-
[1] 赵秋艳. 翼伞雀降技术[J]. 航天返回与遥感, 1999(2): 5-9.ZHAO Q Y. Parafoil bird landing technology[J]. Space Return and Remote Sensing, 1999(2): 5-9 (in Chinese). [2] 王利荣. 降落伞理论与应用[M]. 北京:宇航出版社, 1997: 528-530.WANG L R. Parachute theory and application[M]. Beijing: Aerospace Press, 1997: 528-530 (in Chinese). [3] 赵培尧. 单层翼伞回收末段飞行特性研究[D]. 北京: 北京理工大学, 2017: 59-63.ZHAO P Y. Study on flight characteristics of recovery terminal of single-layer parafoil[D]. Beijing: Beijing Institute of Technology, 2017: 59-63 (in Chinese). [4] 余莉. 气动减速技术[M]. 北京: 科学出版社, 2018: 273-276.YU L. Aerodynamic deceleration technology[M]. Beijing: Science Press, 2018: 273-276 (in Chinese). [5] SLEGERS N, GORMAN C. Comparison and analysis of multi-body parafoil models with varying degrees of freedom[C]// 21st AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar. Reston: AIAA, 2011: 2615. [6] TAN P L, SUN M W, SUN Q L, et al. Dynamic modeling and experimental verification of powered parafoil with two suspending points[J]. IEEE Access, 2020, 8: 12955-12966. doi: 10.1109/ACCESS.2020.2965541 [7] GOODRICK T. Simulation studies of the flight dynamics of gliding parachute systems[C]// 6th Aerodynamic Decelerator and Balloon Technology Conference. Reston: AIAA, 1979: 417. [8] GOODRICK T. Comparison of simulation and experimental data for a gliding parachute in dynamic flight[C]// 7th Aerodynamic Decelerator and Balloon Technology Conference. Reston: AIAA, 1981: 1924. [9] 常冠清, 张泽, 仇海涛, 等. 翼伞系统动力学建模与仿真研究[J]. 导航与控制, 2016, 15(6): 33-40.CHANG G Q, ZHANG Z, QIU H T, et al. Dynamic modeling and simulation of parafoil aerial delivery system[J]. Navigation and Control, 2016, 15(6): 33-40 (in Chinese). [10] ZHANG Z X, ZHAO Z N, FU Y L. Dynamics analysis and simulation of six DOF parafoil system[J]. Cluster Computing, 2019, 22(5): 12669-12680. [11] 张兴会, 朱二琳. 翼伞系统雀降性能及控制研究[J]. 航天控制, 2012, 30(1): 29-32.ZHANG X H, ZHU E L. The study of the flare-landing performance and control of parafoil system[J]. Aerospace Control, 2012, 30(1): 29-32 (in Chinese). [12] OCHI Y. Modeling and simulation of flight dynamics of a relative-roll-type parafoil[C]// AIAA Scitech 2020 Forum. Reston: AIAA, 2020: 1643. [13] GANG Y. Nine-degree of freedom modeling and flight dynamic analysis of parafoil aerial delivery system[J]. Procedia Engineering, 2015, 99: 866-872. doi: 10.1016/j.proeng.2014.12.614 [14] SLEGERS N, COSTELLO M. Aspects of control for a parafoil and payload system[J]. Journal of Guidance, Control, and Dynamics, 2003, 26(6): 898-905. doi: 10.2514/2.6933 [15] MORIYOSHI T, YAMADA K, NISHIDA H. The effect of rigging angle on longitudinal direction motion of parafoil-type vehicle: basic stability analysis and wind tunnel test[J/OL]. International Journal of Aerospace Engineering, 2020: 8861714 (2020-12-07)[2022-10-11]. https://doi.org/10.1155/2020/8861714. [16] 张晓今. 航天器可控翼伞回收系统雀降性能研究[J]. 国防科技大学学报, 1996, 18(2): 5.ZHANG X J. Research on lark landing performance of spacecraft controllable parafoil recovery system[J]. Journal of National University of Defense Technology, 1996, 18(2): 5 (in Chinese). [17] MÜLLER S, WAGNER O, SACHS G. A high-fidelity nonlinear multibody simulation model for parafoil systems[C]// 17th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar. Reston: AIAA, 2003: 2120. [18] PRAKASH O, ANANTHKRISHNAN N. Modeling and simulation of 9-DOF parafoil-payload system flight dynamics[C]// AIAA Atmospheric Flight Mechanics Conference and Exhibit. Reston: AIAA, 2006: 6130. [19] VISHNIAK A. Simulation of the payload-parachute-wing system flight dynamics[C]// Aerospace Design Conference. Reston: AIAA, 1993: 1250. [20] PRAKASH O, DAFTARY A, ANANTHKRISHNAN N. Trim and stability analysis of parafoil/payload system using bifurcation methods[C]// 18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar. Reston: AIAA, 2005: 1666. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 230
- HTML全文浏览量: 112
- PDF下载量: 8
- 被引次数: 0
