



-
摘要:
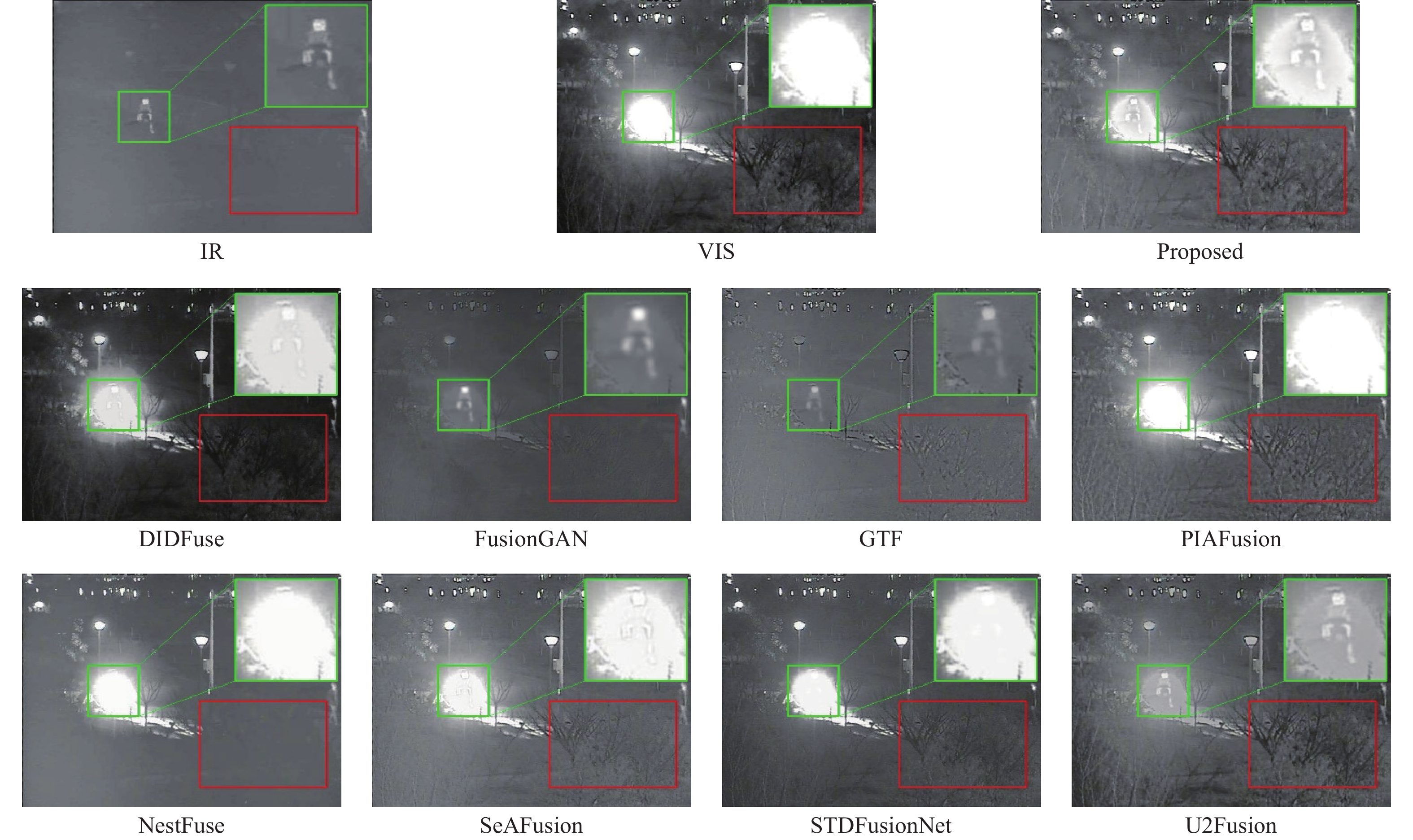
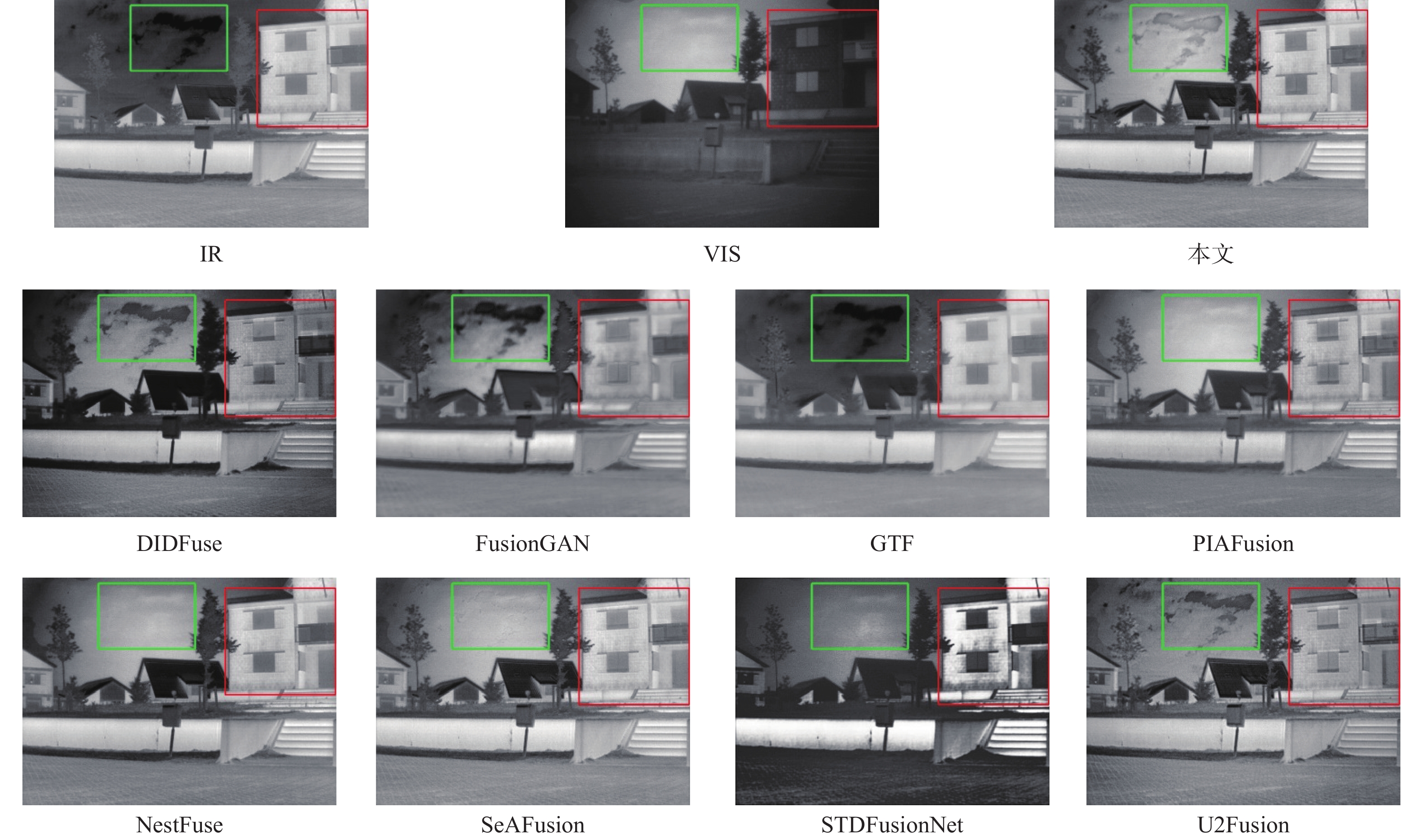
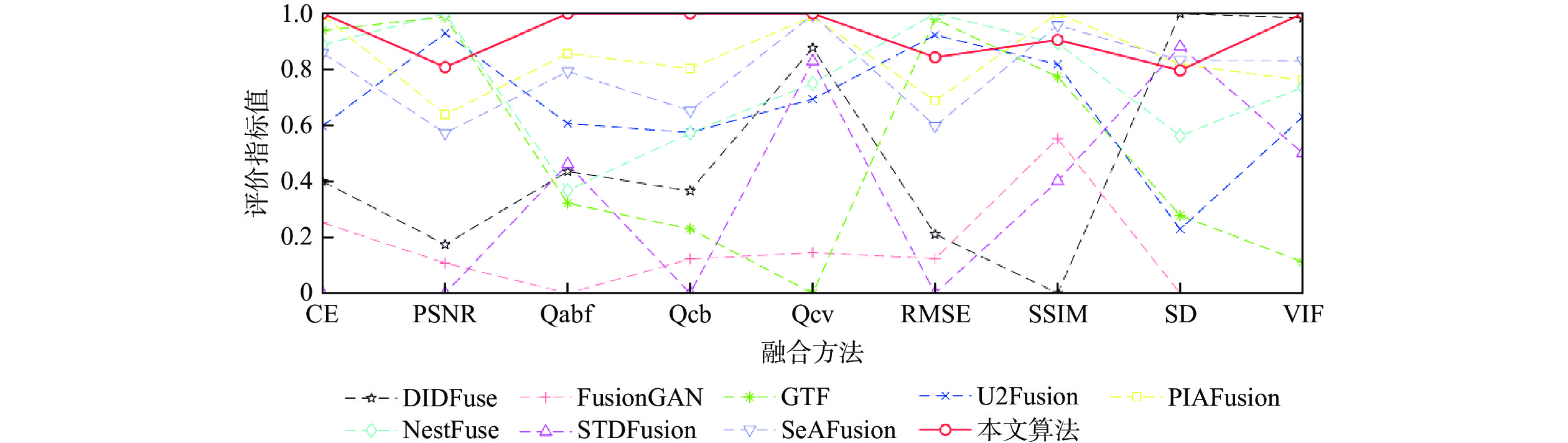
为解决红外与可见光图像融合方法中依赖于人工设计的融合策略、运行时间过长以及无法提取多尺度深度特征的问题,提出了一种实时的基于嵌套连接的多尺度图像融合模型。特征提取器提取多尺度深层次特征,通过融合网络生成具有多尺度深度特征的特征图像,通过图像重构器得到融合图像。在公开数据集上与其他算法进行对比,在主观定性评价中,该算法在保持图像强度的同时能够包含锐利的图像边缘,在过度曝光、目标遮挡、细节模糊等复杂情况下具有更好的融合效果。客观指标对比中,在基于信息论、基于图像特征、基于图像结构相似性和人类感知度量4类9个指标上取得了5个第一2个第二的结果,另外2个指标的结果也处于较高水平,且融合时间大幅缩短。实验证明,该模型能够有效解决当前图像融合方法中存在的问题,具有较高的实用性。
Abstract:This work suggests a multi-scale real-time image fusion model based on nest connection, which aims to address the issues of lengthy running times, unnatural fusion strategies, and the incapacity to extract multi-scale deep features in existing infrared and visible image fusion approaches. Firstly, multi-scale deep features are extracted by a feature extractor. Then, feature maps with multi-scale deep features are generated from the fusion network. Finally, the fusion image is reconstructed by an image re-constructor. In comparison to other algorithms tested on common datasets, a subjective qualitative comparison shows that the algorithm in this paper can contain sharp image edges while maintaining image intensity and it has a better fusion effect under complex conditions such as over-exposure, target occlusion, and detail blurring. In objective quantitative metrics comparison, 5 best values and 2 second best values have been obtained on 9 evaluation metrics of 4 categories which are based on information theory, based on image feature, based on image structure similarity and human perception. Additionally, the other two metrics results have also showed good performance. Moreover, there has been a noticeable reduction in fusion time. The model presented in this paper has a high practicability and may successfully overcome the current issues with picture fusion techniques through experimental verification.
-
Key words:
- image fusion /
- deep learning /
- nest connection /
- multi-scale /
- real-time
-

图 3 基于嵌套连接的多尺度实时图像融合模型网络结构
Figure 3. The architecture of multi-scale real-time infrared and visible image fusion based on Nest Connection
表 1 网络结构参数
Table 1. Network structure parameters
模块 层 卷积核 输入 输出 步长 填充 激活 特征提取器 Conv1 3×3 2 16 1 1 leaky ReLU DPCB1 16 32 DPCB2 32 48 DPCB3 48 64 特征融合器 Conv2 3×3 32 16 1 1 leaky ReLU Conv3 3×3 64 32 1 1 leaky ReLU Conv4 3×3 96 48 1 1 leaky ReLU Conv5 3×3 48 32 1 1 leaky ReLU Conv6 3×3 96 32 1 1 leaky ReLU 图像重构器 Conv7 3×3 64 48 1 1 leaky ReLU Conv8 3×3 48 32 1 1 leaky ReLU Conv9 3×3 32 16 1 1 leaky ReLU Conv10 1×1 16 1 1 0 Tanh DPCB Max-pooling Conv 3×3 Nin Nin 1 1 leaky ReLU Conv 3×3 Nin Nout 1 1 leaky ReLU 上采样卷积 UpSamping Conv 1×1 N N-16 1 0  下载: 导出CSV
下载: 导出CSV
表 2 实验评价结果
Table 2. Evaluation metric values of all methods
数据集 方法 评价指标 CE PSNR Qabf Qcb Qcv RMSE SSIM SD VIF RoadScene DIDFuse(2,0,0) 1.070 59.275 0.511 0.511 289 0.077 1.344 69.910 0.735 FusionGAN(0,0,0) 1.142 58.594 0.272 0.496 573 0.091 1.318 40.735 0.365 GTF(0,3,0) 0.523 60.121 0.344 0.498 460 0.064 1.484 58.562 0.430 U2Fusion(3,1,1) 0.822 60.194 0.526 0.573 464 0.063 1.534 39.507 0.437 PIAFusion(1,1,0) 0.503 59.665 0.426 0.525 318 0.071 1.516 47.939 0.392 NestFuse(0,0,3) 0.730 59.279 0.536 0.496 285 0.077 1.303 64.756 0.598 STDFusion(0,1,0) 1.622 58.145 0.312 0.386 880 0.100 1.215 69.405 0.589 SeAFusion(1,1,2) 0.673 59.389 0.540 0.545 248 0.075 1.486 57.127 0.573 Proposed(2,2,3) 0.585 59.918 0.673 0.615 262 0.067 1.467 52.243 0.688 MSRS DIDFuse(0,0,0) 2.274 59.374 0.241 0.375 717 0.077 0.631 34.740 0.419 FusionGAN(0,1,0) 1.919 60.094 0.171 0.390 3892 0.064 1.266 20.460 0.122 GTF(0,0,0) 0.891 59.994 0.271 0.432 4305 0.066 1.218 19.645 0.166 U2Fusion(0,0,0) 2.694 59.184 0.380 0.393 1364 0.080 1.144 23.494 0.321 PIAFusion(3,0,2) 0.638 60.003 0.696 0.583 89 0.066 1.434 52.559 0.795 NestFuse(2,4,0) 0.697 60.188 0.723 0.567 68 0.062 1.428 50.046 0.715 STDFusion(0,0,0) 4.365 59.361 0.497 0.350 301 0.076 1.183 37.551 0.414 SeAFusion(1,3,3) 0.923 60.122 0.698 0.599 68 0.064 1.455 48.568 0.724 Proposed(3,4,2) 0.742 60.152 0.737 0.635 64 0.064 1.448 48.830 0.748 TNO DIDFuse(2,0,0) 1.069 59.714 0.351 0.507 315 0.071 1.282 45.935 0.643 FusionGAN(0,0,0) 2.373 58.728 0.179 0.469 929 0.090 1.239 23.908 0.212 GTF(2,1,1) 0.527 60.780 0.327 0.467 1159 0.055 1.379 29.650 0.223 U2Fusion(3,1,2) 0.713 60.790 0.424 0.567 503 0.055 1.411 34.033 0.640 PIAFusion(1,2,0) 0.786 59.957 0.559 0.596 247 0.067 1.399 39.709 0.362 NestFuse(0,1,2) 0.686 60.064 0.420 0.521 220 0.065 1.286 39.968 0.343 STDFusion(0,1,0) 1.222 59.398 0.339 0.464 382 0.076 1.217 40.790 0.271 SeAFusion(1,0,0) 0.770 60.097 0.410 0.539 218 0.065 1.354 38.775 0.478 Proposed(1,2,4) 0.600 60.238 0.486 0.611 222 0.063 1.320 38.724 0.479 VIFB DIDFuse(2,0,0) 2.087 57.961 0.501 0.523 404 0.107 1.260 53.718 0.748 FusionGAN(0,0,0) 1.947 58.633 0.223 0.357 1649 0.093 1.407 24.191 0.186 GTF(0,2,0) 1.356 58.819 0.465 0.405 2178 0.090 1.433 27.859 0.256 U2Fusion(3,0,2) 1.099 59.304 0.572 0.556 724 0.081 1.483 34.047 0.552 PIAFusion(1,4,2) 1.051 58.633 0.657 0.575 250 0.093 1.457 46.840 0.621 NestFuse(0,0,0) 1.535 58.536 0.494 0.435 397 0.095 1.451 43.936 0.386 STDFusion(0,0,2) 1.669 58.692 0.503 0.411 511 0.095 1.419 45.281 0.456 SeAFusion(0,1,2) 1.413 58.377 0.579 0.470 328 0.099 1.458 43.936 0.512 Proposed(3,2,1) 1.010 58.658 0.693 0.581 278 0.092 1.450 45.171 0.657 数据集均值 DIDFuse(1,1,0) 1.625 59.081 0.401 0.479 431 0.083 1.129 51.076 0.636 FusionGAN(0,0,0) 1.845 59.012 0.211 0.428 1761 0.084 1.308 27.323 0.221 GTF(2,1,0) 0.824 59.929 0.352 0.450 2026 0.069 1.379 33.929 0.269 U2Fusion(0,2,0) 1.332 59.868 0.476 0.522 764 0.070 1.393 32.770 0.487 PIAFusion(1,3,2) 0.745 59.565 0.585 0.570 226 0.074 1.452 46.762 0.542 NestFuse(0,1,0) 0.912 59.517 0.543 0.505 243 0.075 1.368 49.677 0.511 STDFusion(0,0,1) 2.220 58.899 0.412 0.402 518 0.087 1.259 48.257 0.433 SeAFusion(0,2,3) 0.945 59.496 0.557 0.538 216 0.076 1.438 47.102 0.572 Proposed(5,0,2) 0.734 59.741 0.647 0.611 206 0.071 1.421 46.242 0.643 注:CE、Qcv和RMSE为负向指标,其余为正向指标,每个指标最佳3个值分别用红色、绿色和蓝色表示,每个方法后的3个数字为第1、第2、第3值的数量。
下载: 导出CSV
表 3 9种算法在4个数据集共40个图像对的平均运行时间
Table 3. Average running time of the 9 algorithms in 40 image pairs in 4 data sets
融合方法 时间均值/s DIDFuse 0.161 FusionGAN 2.703 GTF 8.214 U2Fusion 3.495 PIAFusion 4.531 NestFuse 0.318 STDFusion 1.415 SeAFusion 0.089 本文 0.034 注:最佳3个值分别用红色、绿色和蓝色表示。
下载: 导出CSV
-
[1] 曹金亮, 薛伟民, 蔡雨含, 等. 一种红外与可见光图像信息交换融合网络[J]. 太原科技大学学报, 2022, 43(4): 277-282.CAO J L, XUE W M, CAI Y H, et al. Infrared and visible image information exchange-fusion algorithm[J]. Journal of Taiyuan University of Science and Technology, 2022, 43(4): 277-282 (in Chinese). [2] 杨叶君, 刘刚, 肖刚, 等. 基于自适应特征增强和生成器路径交互的红外与可见光图像融合[J]. 激光与光电子学进展, 2022: 1-18.YANG Y J, LIU G, XIAO G, et al. Infrared and visible image fusion based on adaptive feature enhancement and generator path interaction[J]. Laser & Optoelectronics Progress, 2022: 1-18(in Chinese). [3] ZHANG X C, YE P, LEUNG H, et al. Object fusion tracking based on visible and infrared images: a comprehensive review[J]. Information Fusion, 2020, 63: 166-187. [4] 王建中, 徐浩楠, 王洪枫, 等. 基于残差密集块和自编码网络的红外与可见光图像融合[J]. 北京理工大学学报, 2021, 41(10): 1077-1083.WANG J Z, XU H N, WANG H F, et al. Infrared and visible image fusion based on residual dense block and auto-encoder network[J]. Transactions of Beijing Institute of Technology, 2021, 41(10): 1077-1083 (in Chinese). [5] 宋加文, 朱大明, 付志涛, 等. 基于对比度和结构提取的红外与可见光图像融合[J]. 激光与光电子学进展, 2023, 60(14): 1410005.SONG J W, ZHU D M, FU Z T, et al. Infrared and visible image fusion based on contrast and structure extraction[J]. Laser & Optoelectronics Progress, 2023, 60(14): 1410005(in Chinese). [6] 张冬冬, 王春平, 付强. 深度学习框架下的红外与可见光图像融合算法综述[J]. 激光与红外, 2022, 52(9): 1288-1298.ZHANG D D, WANG C P, FU Q. Overview of infrared and visible image fusion algorithms based on deep learning framework[J]. Laser & Infrared, 2022, 52(9): 1288-1298 (in Chinese). [7] 魏琦, 赵娟. 红外和可见光图像融合算法的研究进展[J]. 计算机科学, 2023, 50(2): 11.WEI Q, ZHAO J. Research progress of infrared and visible image fusion algorithms[J]. Computer Science, 2023, 50(2): 11(in Chinese). [8] LI H, WU X J, DURRANI T. NestFuse: an infrared and visible image fusion architecture based on nest connection and spatial/channel attention models[J]. IEEE Transactions on Instrumentation Measurement, 2020, 69(12): 9645-9656. [9] MA J Y, YU W, LIANG P W, et al. FusionGAN: a generative adversarial network for infrared and visible image fusion[J]. Information Fusion, 2019, 48: 11-26. [10] MA J Y, TANG L F, XU M L, et al. STDFusionNet: an infrared and visible image fusion network based on salient target detection[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 5009513. [11] ZHAO Z X, XU S, ZHANG C X, et al. DIDFuse: deep image decomposition for infrared and visible image fusion[C]// Proceedings of the Twenty-Ninth International Joint Conference on Artificial Intelligence. California: International Joint Conferences on Artificial Intelligence Organization, 2020: 1-5. [12] TANG L F, YUAN J T, ZHANG H, et al. PIAFusion: a progressive infrared and visible image fusion network based on illumination aware[J]. Information Fusion, 2022, 83-84: 79-92. [13] 汤璐, 卢荣胜, 史艳琼, 等. 基于YCbCr空间融合的高动态范围成像方法[J]. 激光与光电子学进展, 2022, 59(14): 308-319.TANG L, LU R S, SHI Y Q, et al. High dynamic range imaging method based on YCbCr Color space fusion[J]. Laser & Optoelectronics Progress, 2022, 59(14): 308-319(in Chinese). [14] XU H, MA J Y, JIANG J J, et al. U2Fusion: a unified unsupervised image fusion network[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(1): 502-518. [15] ZHOU Z W, SIDDIQUEE M M R, TAJBAKHSH N, et al. UNet++: a nested U-net architecture for medical image segmentation[J]. Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support: 4th International Workshop, DLMIA 2018, and 8th International Workshop, ML-CDS 2018, Held in Conjunction with MICCAI 2018. Granada, Spain: [s.n.], 2018, 11045: 3-11. [16] TANG L F, YUAN J T, MA J Y. Image fusion in the loop of high-level vision tasks: a semantic-aware real-time infrared and visible image fusion network[J]. Information Fusion, 2022, 82: 28-42. [17] 闵莉, 曹思健, 赵怀慈, 等. 改进残差密集生成对抗网络的红外与可见光图像融合[J]. 控制与决策, 2022, 37(1): 1-8.MIN L, CAO S J, ZHAO H C, et al. Infrared and visible image fusion with improved residual dense generative adversarial network[J]. Control and Decision, 2022, 37(1): 1-8(in Chinese). [18] MA J Y, CHEN C, LI C, et al. Infrared and visible image fusion via gradient transfer and total variation minimization[J]. Information Fusion, 2016, 31: 100-109. [19] ZHANG X C, YE P, XIAO G. VIFB: a visible and infrared image fusion benchmark[C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway: IEEE Press, 2020: 468-478. [20] LI H, WU X J, KITTLER J. RFN-Nest: an end-to-end residual fusion network for infrared and visible images[J]. Information Fusion, 2021, 73: 72-86. [21] 张勇, 马东玺, 闫鹏程. 灰度夜视融合图像质量结构相似度评价方法[J]. 光子学报, 2014, 43(S1): 242-248.ZHANG Y, MA D X, YAN P C. Structural similarity evaluation method to night vision fusion image quality[J]. Acta Photonica Sinica, 2014, 43(S1): 242-248(in Chinese). -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 755
- HTML全文浏览量: 314
- PDF下载量: 49
- 被引次数: 0
