



-
摘要:
针对飞行区航空器单一监视源存在监视精度低、位置跳变的问题,提出一种基于Transformer和注意力机制的航空器监视数据融合方法。利用Transformer的编码器结构分别对各监视源数据进行特征提取,通过注意力机制对不同监视源赋予权重值,经过全连接网络进行回归计算,获得最终的融合结果。选取场面监视雷达(SMR)和广播式自动相关监视(ADS-B)系统的监视数据作为融合源,多点定位(MLAT)数据作为真实标签,实验结果表明:所提方法有效降低了单一监视源的监视误差,且融合效果优于基于注意力机制的长短期记忆网络、循环神经网络和扩展卡尔曼滤波融合方法,平均绝对误差分别提升了2.81%、16.73%和35.80%。
-
关键词:
- 数据融合 /
- Transformer /
- 注意力机制 /
- 场面监视雷达 /
- 广播式自动相关监视
Abstract:An aircraft surveillance data fusion method based on a Transformer and attention mechanism is proposed to address the issues of low monitoring accuracy and position jump in a single surveillance source for aircraft in the flight area. Prior to assigning weight values to various surveillance sources via the attention mechanism, features are first extracted from each surveillance source data using the Transformer’s encoder structure. Finally, regression calculations are performed through a fully connected network to obtain the final fusion result. The multilateration (MLAT) data are employed as actual tags, while the surveillance data from the autonomous dependent surveillance-broadcast (ADS-B) system and the surface movement radar (SMR) are chosen as fusion sources. The experimental results show that the proposed method effectively reduces the surveillance error of a single surveillance source, and the fusion effect is better than that of the long short-term memory network based on the attention mechanism, recurrent neural network, and extended Kalman filter fusion methods. The mean absolute error is increased by 2.81%, 16.73% and 35.80% respectively.
-
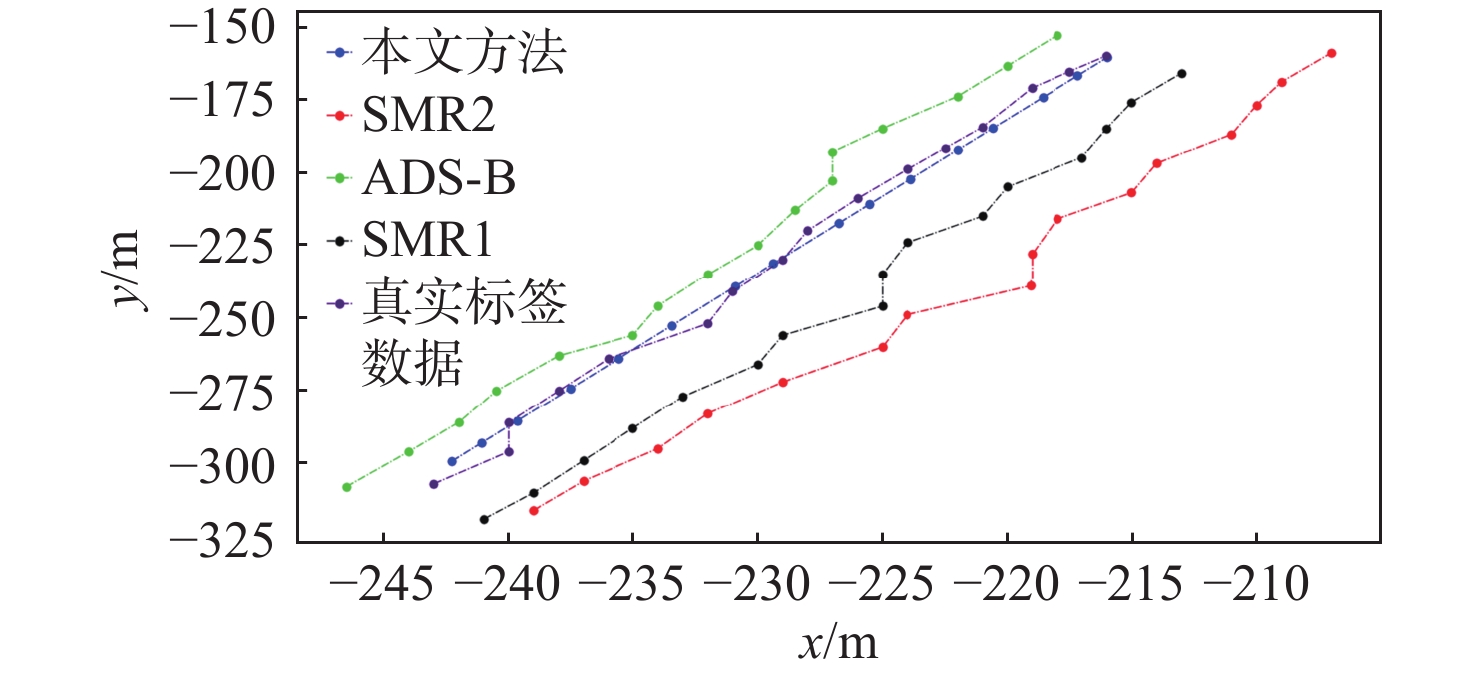
图 4 航空器直线滑行时模型融合结果
Figure 4. Model fusion results during aircraft straight-line taxiing
表 1 Trans-Attention融合模型参数设置
Table 1. Trans-Attention fusion model parameter settings
学习率 隐藏层
丢失率训练
轮次多头注意
力个数Encode层
深度批量
大小0.001 0.1 600 6 2 048 8  下载: 导出CSV
下载: 导出CSV
表 2 基于Trans-Attention融合方法结果数据评估
Table 2. Data evaluation based on Trans-Attention fusion method results
数据来源 MSE/m RMSE/m MAE/m Trans-Attention 4.2811 2.0691 2.0595 ADS-B 14.4971 3.8075 4.3479 SMR1 36.3145 6.0262 8.2769 SMR2 47.4476 6.8882 10.6579
下载: 导出CSV
表 3 EKF融合方法参数设置
Table 3. EKF fusion method parameter settings
参数类型 参数值 初始化状态协方差矩阵P0 [1.000001.000001.000001.0] 过程噪声协方差Q0 [0.0001000000.0001000000.00009000000.001000000.001] SMR1的测量协方差矩阵R1 [6.250000.00160006.25] SMR2的测量协方差矩阵R2 [4.62250000.00090004.6255] ADS-B的测量协方差矩阵R3 [2.25002.25]
下载: 导出CSV
表 4 RNN融合方法参数设置
Table 4. RNN fusion method parameter settings
学习率 隐藏层丢失率 训练轮次 批量大小 RNN层数 0.001 0.1 300 8 2
下载: 导出CSV
表 5 LSTM-Attention融合方法参数设置
Table 5. LSTM-Attention fusion method parameter settings
学习率 隐藏层丢失率 训练轮次 批量大小 LSTM层数 0.001 0.1 300 8 2
下载: 导出CSV
表 6 不同融合方法结果数据评估
Table 6. Data evaluation form for results of different fusion methods
方法 MSE/m RMSE/m MAE/m 本文方法 4.2811 2.0691 2.0595 EKF 9.9745 3.1582 3.2078 LSTM-Attention 4.3775 2.0922 2.1190 RNN 4.9697 2.2293 2.4732
下载: 导出CSV
-
[1] LANZKRON P, BROOKNER E. Solid state X-band airport surface surveillance radar[C]//Proceedings of the IEEE Radar Conference. Piscataway: IEEE Press, 2007: 670-676. [2] 卿烈华. 场面监视雷达系统在民用机场的应用[J]. 数字技术与应用, 2018, 36(5): 100-102.QING L H. Application of scene surveillance radar system in civil airports[J]. Digital Technology and Application, 2018, 36(5): 100-102(in Chinese). [3] 王思达, 段昌淼. 基于ADS-B的场面监视技术探讨[J]. 空运商务, 2018(6): 59-61. doi: 10.3969/j.issn.1671-3095.2018.06.030WANG S D, DUAN C M. Discussion on scene monitoring technology based on ADS-B[J]. Air Transport & Business, 2018(6): 59-61(in Chinese). doi: 10.3969/j.issn.1671-3095.2018.06.030 [4] VASYLIEV V M, VASYLIEV D V, NAUMENKO K V. Using data of multilateration surveillance system for aircraft tracking[C]// Proceedings of the 4th International Conference on Methods and Systems of Navigation and Motion Control. Piscataway: IEEE Press, 2016: 279-283. [5] 戴敏. 结合正则化求解的机场场面多点定位方法[J]. 计算机工程与设计, 2021, 42(10): 2995-3001.DAI M. Multilateration method for airport surface surveillance based on regularization[J]. Computer Engineering and Design, 2021, 42(10): 2995-3001(in Chinese). [6] AKRAM M A, LIU P L, TAHIR M O, et al. A state optimization model based on Kalman filtering and robust estimation theory for fusion of multi-source information in highly non-linear systems[J]. Sensors, 2019, 19(7): 1687. doi: 10.3390/s19071687 [7] 张学军, 张其善. ATM中的ADS-SSR数据融合研究[J]. 北京航空航天大学学报, 2001, 27(1): 24-27. doi: 10.3969/j.issn.1001-5965.2001.01.007ZHANG X J, ZHANG Q S. Data fusion of ADS-SSR in air traffic management[J]. Journal of Beijing University of Aeronautics and Astronautics, 2001, 27(1): 24-27(in Chinese). doi: 10.3969/j.issn.1001-5965.2001.01.007 [8] XIA X, HASHEMI E, XIONG L, et al. Autonomous vehicle kinematics and dynamics synthesis for sideslip angle estimation based on consensus Kalman filter[J]. IEEE Transactions on Control Systems Technology, 2022, 31(1): 179-192. [9] 刘康, 何明浩, 韩俊, 等. 基于多传感器的雷达对抗侦察数据融合算法[J]. 系统工程与电子技术, 2023, 45(1): 101-107.LIU K, HE M H, HAN J, et al. Data fusion algorithm for radar countermeasures and reconnaissance based on multi-sensor[J]. Systems Engineering and Electronics, 2023, 45(1): 101-107(in Chinese). [10] 李素. 基于航迹质量分析的加权平均融合算法[J]. 现代计算机(专业版), 2018, 24(5): 12-15.LI S. A weighted average fusion algorithm based on track quality analysis[J]. Modern Computer, 2018, 24(5): 12-15(in Chinese). [11] RAJASEKARAN R K, AHMED N, FREW E. Bayesian fusion of unlabeled vision and RF data for aerial tracking of ground targets[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2020: 1629-1636. [12] 郭建刚, 陈鹏, 郑伟. 多表冗余惯导数据融合算法及在自对准中的应用[J]. 北京航空航天大学学报, 2020, 46(12): 2211-2216.GUO J G, CHEN P, ZHENG W. Data fusion algorithm of multi-sensor redundant inertial navigation and its application in self-alignment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(12): 2211-2216(in Chinese). [13] 周恩帆, 马俊, 周永杰, 等. 一种D-S证据理论的多传感器数据融合算法[J]. 小型微型计算机系统, 2022, 43(4): 795-800.ZHOU E F, MA J, ZHOU Y J, et al. Multi-sensor data fusion algorithm based on D-S evidence theory[J]. Journal of Chinese Computer Systems, 2022, 43(4): 795-800(in Chinese). [14] KACZMAREK A, ROHM W, KLINGBEIL L, et al. Experimental 2D extended Kalman filter sensor fusion for low-cost GNSS/IMU/Odometers precise positioning system[J]. Measurement, 2022, 193: 110963. doi: 10.1016/j.measurement.2022.110963 [15] 宋安宇. 基于RNN的航空监视信息融合技术的研究与实现[D]. 北京: 北京邮电大学, 2019.SONG A Y. Research and implementation of aviation surveillance information fusion technology based on RNN[D]. Beijing: Beijing University of Posts and Telecommunications, 2019(in Chinese). [16] 孟致远. 基于多神经网络的航空监视信息融合系统的研究与实现[D]. 北京: 北京邮电大学, 2021.MENG Z Y. The research and implementation of aviation surveillance information fusion system based on multi neural network[D]. Beijing: Beijing University of Posts and Telecommunications, 2021 (in Chinese). [17] 陈建军, 孙俊, 杨予昊, 等. 机场场面监视雷达系统设计[J]. 现代雷达, 2018, 40(12): 11-14.CHEN J J, SUN J, YANG Y H, et al. Design of airport surface movement radar system[J]. Modern Radar, 2018, 40(12): 11-14(in Chinese). [18] LU Y, HUANG R S, XU Z L. Multi-sensor data fusion based on ADS-B and MLAT in approach[J]. Applied Mechanics and Materials, 2014, 602-605: 2491-2494. doi: 10.4028/www.scientific.net/AMM.602-605.2491 [19] 闫峰. 浅析北京大兴国际机场多点监视系统[J]. 电脑知识与技术, 2021, 17(21): 136-138.YAN F. Analysis of Beijing daxing international airport multipoint surveillance system[J]. Computer Knowledge and Technology, 2021, 17(21): 136-138(in Chinese). [20] 牛中伟, 陈健明. 空管场监系统雷达数据格式分析[J]. 信息通信, 2019, 32(1): 156-158.NIU Z W, CHEN J M. Analysis of radar data format for air traffic control field supervision system[J]. Information & Communications, 2019, 32(1): 156-158(in Chinese). [21] VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30: 5998-6008. -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 30
- HTML全文浏览量: 9
- PDF下载量: 1
- 被引次数: 0
