



Re-entry trajectory planning for hypersonic morphing vehicles using penalty sequence convex programming
-
摘要:
为实现高超声速飞行器由固定构型的单点最优向可变构型的全包线持续最优的跨越升级,设计了类乘波体变体飞行器布局与变后掠-变展长复合变形方案。在此基础上,针对高超声速变体飞行器再入轨迹规划问题求解难度大、规划耗时高的问题,提出了自适应信赖域更新的罚函数序列凸优化方法。采用对数凸化策略凸化路径约束,提高近似精度;引入虚拟控制,对动力学等式约束进行变量替换;定制二阶锥约束,并采用罚函数方法将其加入目标函数中,引导迭代结果向可行域逼近;设计自适应信赖域更新策略,加速序列凸优化算法收敛。仿真结果表明:相比于固定构型,高超变体飞行器增程16.63%,增程效果明显;相比于hp伪谱法,所提算法求解耗时降低了89.24%,具有更高的时效性。
Abstract:To realize continuous leapfrog upgrades of the hypersonic vehicle from single-point optimal fixed configuration to full envelope optimal of morphing configuration, a quasi-wave rider profile and composite deformation scheme morphing wingspan and sweep are designed. On this basis, to reduce the computational burdens of reentry trajectory planning, the adaptive trust-region-based penalty sequence convex programming method is proposed. To increase the approximate accuracy, the path restrictions are communicated using the logarithmic convexification technique. A virtual control is introduced to replace the dynamic equation constraints. Using the penalty function method, modify the second-order cone constraint and incorporate it into the objective function to direct the iterative results in order to approximate the feasible domain. An adaptive trust region updating strategy is designed to accelerate the convergence of the sequence convex optimization algorithm. As demonstrated by the simulation results, the hypersonic morphing vehicle's range extension is 16.63% when compared to the fixed configuration, and the ATP-SCP computing time is 89.24% less than when compared to the HP pseudospectral method.
-
图 4 固定/可变构型状态变量对比
Figure 4. Comparison on state variables of fixed and morphing configuration
图 5 固定/可变构型路径约束对比
Figure 5. Comparison on path constraints of fixed and morphing configuration
图 6 固定/可变构型机翼变形量
Figure 6. Comparison on morphing variables of fixed and morphing configuration
图 7 hp伪谱法与ATP-SCP算法状态变量对比
Figure 7. Comparison on state variables of hp pseudospectrum and ATP-SCP algorithm
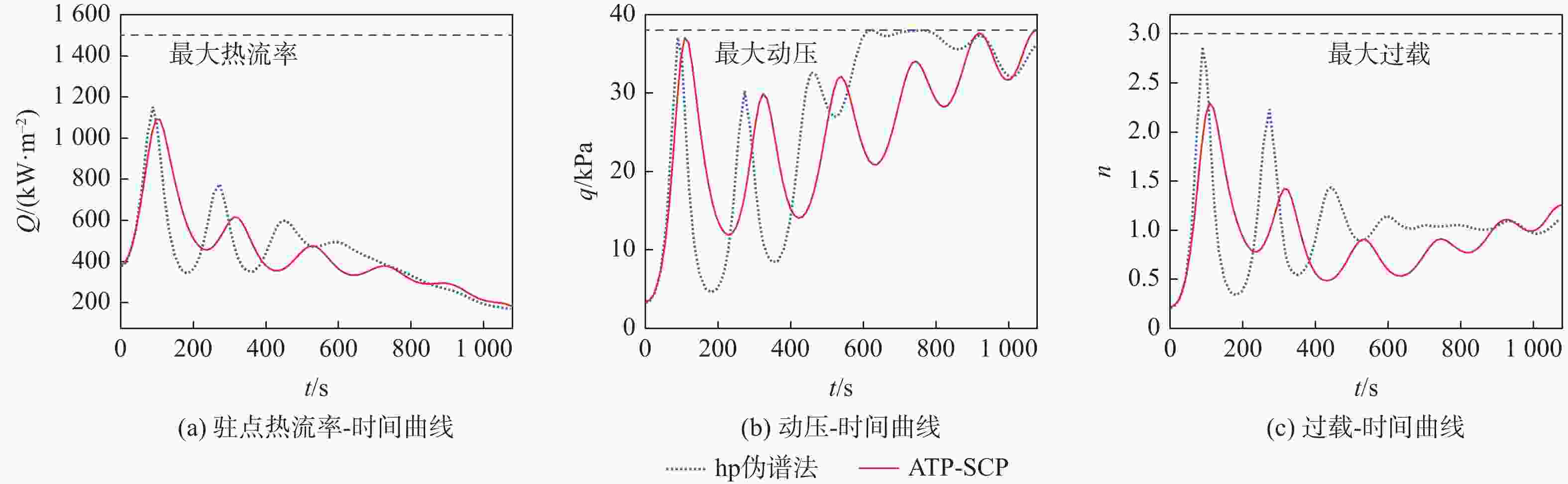
图 8 hp伪谱法与ATP-SCP算法路径约束对比
Figure 8. Comparison on path constraints of hp pseudospectrum and ATP-SCP algorithm
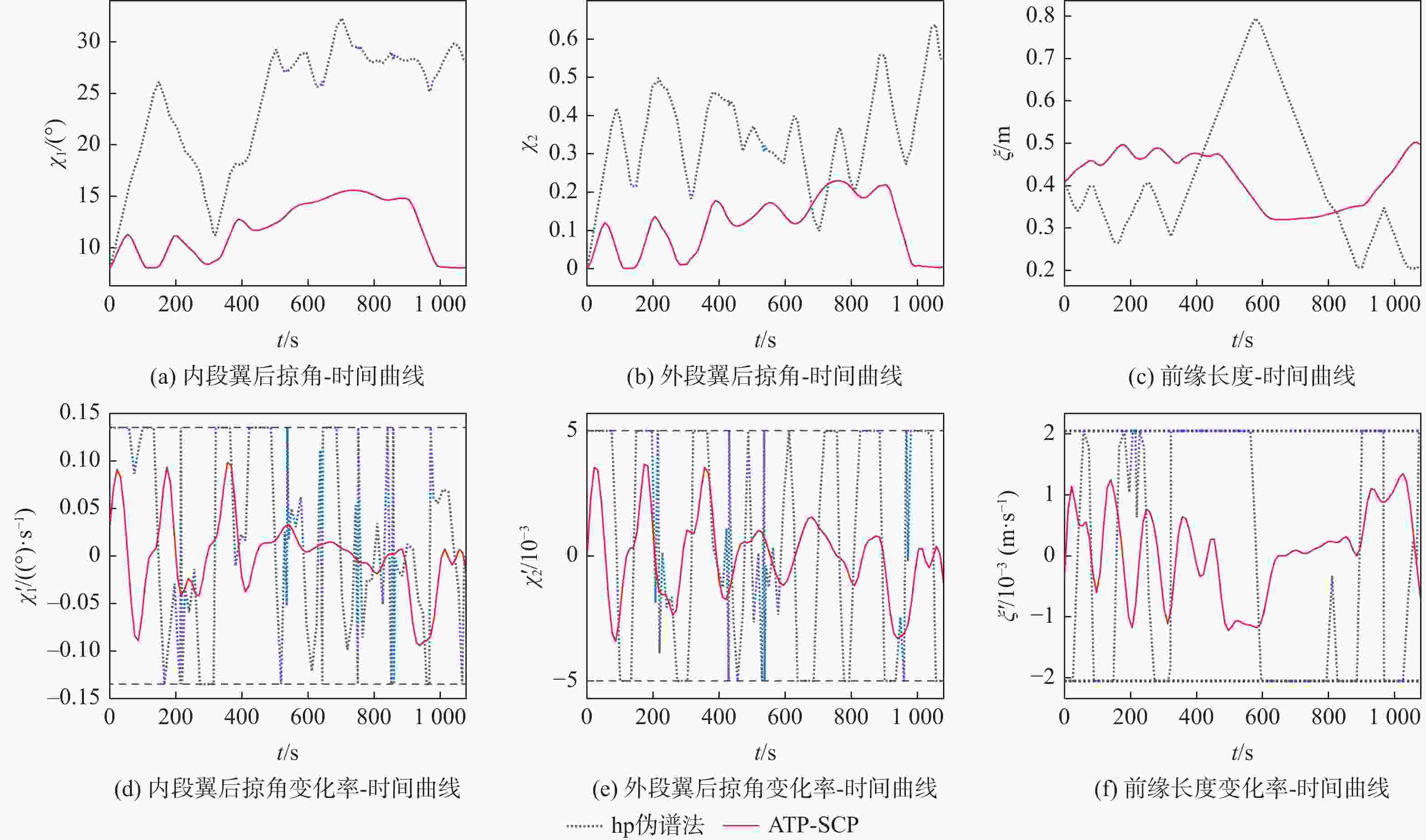
图 9 hp伪谱法与ATP-SCP算法变形量及对应控制变量对比
Figure 9. Comparison on morphing and control variables of hp pseudospectrum and ATP-SCP algorithm
表 1 升力系数、阻力系数和参考面积拟合精度
Table 1. RMSE of $ {{{C}}_{\rm{L}}} $, ${{{C}}_{\rm{D}}}$ and ${{S}}$
拟合精度指标 CL CD 参考面积/m2 RMSE 0.0096 0.0074 0.0195  下载: 导出CSV
下载: 导出CSV
表 2 高超声速变体飞行器参数
Table 2. Parameters of hypersonic morphing vehicle
飞行器性能参数 数值 质量m/kg 5500 固定外形参考翼面积S/m2 10.94 最大热流率${\dot Q_{{\mathrm{s}},\max }}$/(kW·m−2) 1500 热流相关系数$ {k_Q} $ $5 \times {10^{ - 8}}$ 最大动压${q_{\max }} $/kPa 38 最大过载${n_{\max }} $ 3g
下载: 导出CSV
表 3 初末状态1
Table 3. Initial and final state 1
状态 射程x/km 海拔h/km 速度v/(m·s−1) 弹道倾角$\gamma $/(°) 内段翼后掠角${\chi _1}$/(°) 内段翼后后掠角${\chi _2}$ 展长$\xi $/m 初始状态 0 55 4950 −1 8 0 0.41 终端状态 30 2 000
下载: 导出CSV
表 4 初末状态2
Table 4. Initial and final state 2
变量 射程x/km 海拔h/km 速度v/(m·s−1) 弹道倾角$\gamma $/(°) 攻角$\alpha $/(°) 内段翼后掠角${\chi _1}$/(°) 外段翼后后掠角${\chi _2}$ 前缘长度$\xi $/m 初始状态 0 61 5100 0 18 8 0 0.41 终端状态 30 12
下载: 导出CSV
表 5 求解耗时与最优性对比
Table 5. Comparison of solving time and optimality
算法 求解耗时/s 最大射程/km ATP-SCP 4.10 3695.54 hp伪谱法 38.11 3747.67
下载: 导出CSV
-
[1] 孙聪. 高超声速飞行器强度技术的现状、挑战与发展趋势[J]. 航空学报, 2022, 43(6): 527590.SUN C. Development status, challenges and trends of strength technology for hypersonic vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(6): 527590(in Chinese). [2] 张灿, 王轶鹏, 叶蕾. 国外近十年高超声速飞行器技术发展综述[J]. 战术导弹技术, 2020(6): 81-86.ZHANG C, WANG Y P, YE L. Summary of the technological development of overseas hypersonics in the past ten years[J]. Tactical Missile Technology, 2020(6): 81-86(in Chinese). [3] 朱广生, 段毅, 姚世勇, 等. 跨流域高速飞行器气动设计研究现状及思考[J]. 宇航学报, 2023, 44(3): 358-367.ZHU G S, DUAN Y, YAO S Y, et al. Research status and consideration on aerodynamic design of hypersonic flight vehicle covering various flow regimes[J]. Journal of Astronautics, 2023, 44(3): 358-367(in Chinese). [4] 白鹏, 陈钱, 徐国武, 等. 智能可变形飞行器关键技术发展现状及展望[J]. 空气动力学学报, 2019, 37(3): 426-443.BAI P, CHEN Q, XU G W, et al. Development status of key technologies and expectation about smart morphing aircraft[J]. Acta Aerodynamica Sinica, 2019, 37(3): 426-443(in Chinese). [5] LI D C, ZHAO S W, DA RONCH A, et al. A review of modelling and analysis of morphing wings[J]. Progress in Aerospace Sciences, 2018, 100: 46-62. [6] AJAJ R M, PARANCHEERIVILAKKATHIL M S, AMOOZGAR M, et al. Recent developments in the aeroelasticity of morphing aircraft[J]. Progress in Aerospace Sciences, 2021, 120: 100682. [7] WEISSHAAR T A. Morphing aircraft systems: historical perspectives and future challenges[J]. Journal of Aircraft, 2013, 50(2): 337-353. [8] LI Z H, HU C, DING C B, et al. Stochastic gradient particle swarm optimization based entry trajectory rapid planning for hypersonic glide vehicles[J]. Aerospace Science and Technology, 2018, 76: 176-186. [9] 杨博, 朱一川, 魏延明, 等. 折叠式变体飞行器轨迹优化及控制分析[J]. 中国空间科学技术, 2020, 40(3): 64-75.YANG B, ZHU Y C, WEI Y M, et al. Trajectory optimization and control analysis of folding wing aircraft[J]. Chinese Space Science and Technology, 2020, 40(3): 64-75(in Chinese). [10] 王娜, 陈洁卿, 明超, 等. 基于hp自适应伪谱法的变后掠翼导弹弹道优化设计[J]. 弹道学报, 2016, 28(4): 24-29.WANG N, CHEN J Q, MING C, et al. Optimization design for trajectory of morphing-wing missile based on hp-adaptive pseudo-spectral method[J]. Journal of Ballistics, 2016, 28(4): 24-29(in Chinese). [11] DAI P, YAN B B, LIU R F, et al. Integrated morphing strategy and trajectory optimization of a morphing waverider and its online implementation based on the neural network[J]. IEEE Access, 2021, 9: 59383-59393. [12] BAO C Y, WANG P, TANG G J. Integrated method of guidance, control and morphing for hypersonic morphing vehicle in glide phase[J]. Chinese Journal of Aeronautics, 2021, 34(5): 535-553. [13] WEI Z F, CHENG Y, GUO X X, et al. Hybrid trajectory optimization method and tracking guidance for variable-sweep missiles[J]. Mathematical Problems in Engineering, 2021, 2021(1): 6669618. [14] 陈铁彪, 龚旻, 王洪波, 等. 临近空间可变形滑翔飞行器轨迹优化与性能分析[J]. 宇航学报, 2018, 39(9): 944-952.CHEN T B, GONG M, WANG H B, et al. Trajectory optimization and performance analysis of the near space morphing glide vehicles[J]. Journal of Astronautics, 2018, 39(9): 944-952(in Chinese). [15] 岳彩红, 唐胜景, 郭杰, 等. 高超声速伸缩式变形飞行器再入轨迹快速优化[J]. 系统工程与电子技术, 2021, 43(8): 2232-2243.YUE C H, TANG S J, GUO J, et al. Reentry trajectory rapid optimization for hypersonic telescopic deformable vehicle[J]. Systems Engineering and Electronics, 2021, 43(8): 2232-2243(in Chinese). [16] ROCKAFELLAR R T. Convex analysis[M]. Princeton, NJ: Princeton University Press, 1997. [17] LIU X F, LU P, PAN B F. Survey of convex optimization for aerospace applications[J]. Astrodynamics, 2017, 1(1): 23-40. [18] MALYUTA D, YU Y, ELANGO P, et al. Advances in trajectory optimization for space vehicle control[J]. Annual Reviews in Control, 2021, 52: 282-315. [19] AÇıKMEŞE B, BLACKMORE L. Lossless convexification of a class of optimal control problems with non-convex control constraints[J]. Automatica, 2011, 47(2): 341-347. [20] HARRIS M W, AÇıKMEŞE B. Lossless convexification of non-convex optimal control problems for state constrained linear systems[J]. Automatica, 2014, 50(9): 2304-2311. [21] MAO Y Q, SZMUK M, AÇıKMEŞE B. Successive convexification of non-convex optimal control problems and its convergence properties[C]//2016 IEEE 55th Conference on Decision and Control (CDC). Piscataway: IEEE Press, 2016: 3636-3641. [22] LIU X F, SHEN Z J, LU P. Entry trajectory optimization by second-order cone programming[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(2): 227-241. [23] WANG Z B, GRANT M J. Constrained trajectory optimization for planetary entry via sequential convex programming[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(10): 2603-2615. [24] 陈铁彪, 王洪波, 康永来, 等. 变形技术在助推-滑翔飞行器中的应用前景分析[J]. 战术导弹技术, 2017(5): 1-5,11.CHEN T B, WANG H B, KANG Y L, et al. Application prospects of morphing technology in the boost-glide vehicle[J]. Tactical Missile Technology, 2017(5): 1-5,11(in Chinese). [25] 武宇飞. 多源模型驱动的高超声速变体飞行器总体方案设计优化研究[D]. 北京: 北京理工大学, 2023.WU Y F. Multi-models driven conceptual design optimization of hypersonic morphing aircraft[D]. Beijing: Beijing Institute of Technology, 2023(in Chinese). [26] 陈钱, 白鹏, 李锋. 可变形飞行器机翼两种变后掠方式及其气动特性机理[J]. 空气动力学学报, 2012, 30(5): 658-663.CHEN Q, BAI P, LI F. Morphing aircraft wing variable-sweep: two practical methods and their aerodynamic characteristics[J]. Acta Aerodynamica Sinica, 2012, 30(5): 658-663(in Chinese). [27] VALE J. Aero-structural optimization and performance evaluation of a morphing wing with variable span and camber[J]. Journal of Intelligent Material Systems and Structures, 2011, 22(10): 1057-1073. [28] VIANA F A C, GOGU C, GOEL T. Surrogate modeling: tricks that endured the test of time and some recent developments[J]. Structural and Multidisciplinary Optimization, 2021, 64(5): 2881-2908. [29] 李广华. 高超声速滑翔飞行器运动特性分析及弹道跟踪预报方法研究[D]. 长沙: 国防科学技术大学, 2016.LI G H. Motion characteristics analysis and trajectory prediction for hypersonic glide vehicles[D]. Changsha: National University of Defense Technology, 2016(in Chinese). [30] LOFBERG J. YALMIP: a toolbox for modeling and optimization in matlab[C]//Proceedings of the 2004 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2004: 284-289. [31] DOMAHIDI A, CHU E, BOYD S. ECOS: an SOCP solver for embedded systems[C]//2013 European Control Conference (ECC). Piscataway: IEEE Press, 2013: 3071-3076. [32] PATTERSON M A, RAO A V. GPOPS-II: a MATLAB software for solving multiple-phase optimal control problems using hp-adaptive Gaussian quadrature collocation methods and sparse nonlinear programming[J]. ACM Transactions on Mathematical Software, 2014, 41(1): 1-37. -

 下载:
下载:









 点击查看大图
点击查看大图

计量
- 文章访问数: 996
- HTML全文浏览量: 242
- PDF下载量: 92
- 被引次数: 0
