



-
摘要:
为改善车辆跟踪过程中因遮挡造成的跟踪漂移及身份切换(IDS)问题,在Deep SORT算法基础上提出一种融合全尺度特征与轨迹修正的遮挡车辆跟踪方法。引入全尺度特征提取网络提取目标不同尺度特征并实现自适应动态融合,增强目标表观特征。提出一种轨迹修正算法对遮挡过程中的跟踪轨迹进行修复,重新更新Kalman滤波参数以减小遮挡过程中累积的线性误差,优化目标运动特征。结合外观特征和运动特征实现遮挡车辆跟踪。通过消融实验与可视化分析验证所提方法的可行性,在KITTI数据集上的实验结果表明:与现有典型方法相比,所提方法取得最高综合得分为78.13%和最低的IDS次数为192,有效改善遮挡车辆跟踪中的IDS问题,提高车辆跟踪鲁棒性。
Abstract:An occluded vehicle tracking method that fuses full-scale features with trajectory correction based on the Deep SORT algorithm is proposed to improve the tracking drift and identity switching (IDS) problems caused by occlusion in vehicle tracking. First, a full-scale feature extraction network is introduced to extract features of different scales of the target and to achieve adaptive dynamic fusion to enhance the apparent features of the target. Then, a trajectory correction approach is suggested to fix the tracking trajectory during the occlusion process, and the Kalman filter parameters are adjusted in order to minimize the cumulative linear errors during the occlusion process and optimize the target motion features. Finally, occluded vehicle tracking is achieved by combining the appearance features and the motion features. The feasibility of the proposed method is verified by ablation experiments and visualized analysis. The suggested approach successfully resolves the IDS issue in obscured vehicle tracking and increases the robustness of vehicle tracking, as demonstrated by experimental results on the KITTI dataset, which yield the highest overall score of 78.13% and the fewest number of IDS (192), when compared to typical existing methods.
-
Key words:
- computer application /
- multiple object tracking /
- vehicle tracking /
- full scale /
- trajectory correction
-
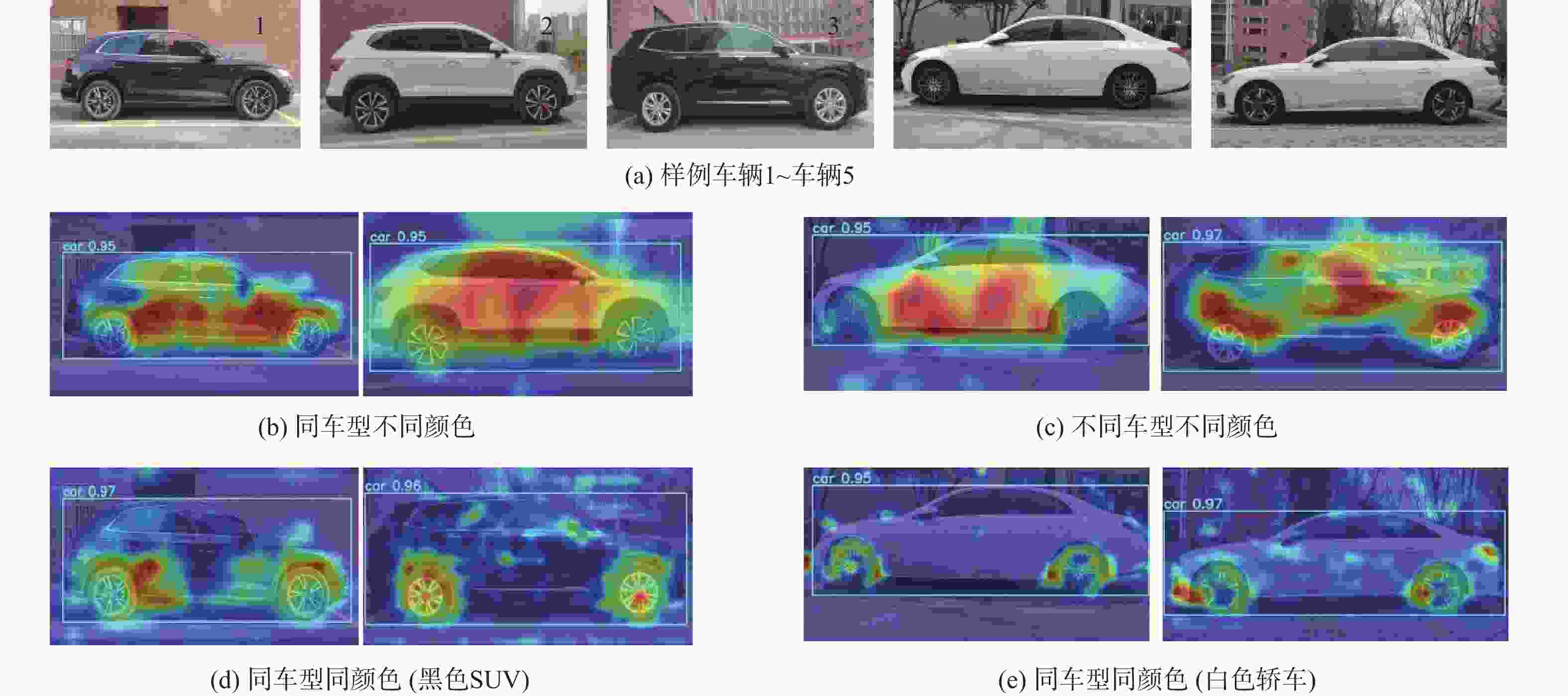
图 9 不同输入下车辆特征注意力热图
Figure 9. Heat map of vehicle feature attention with different inputs
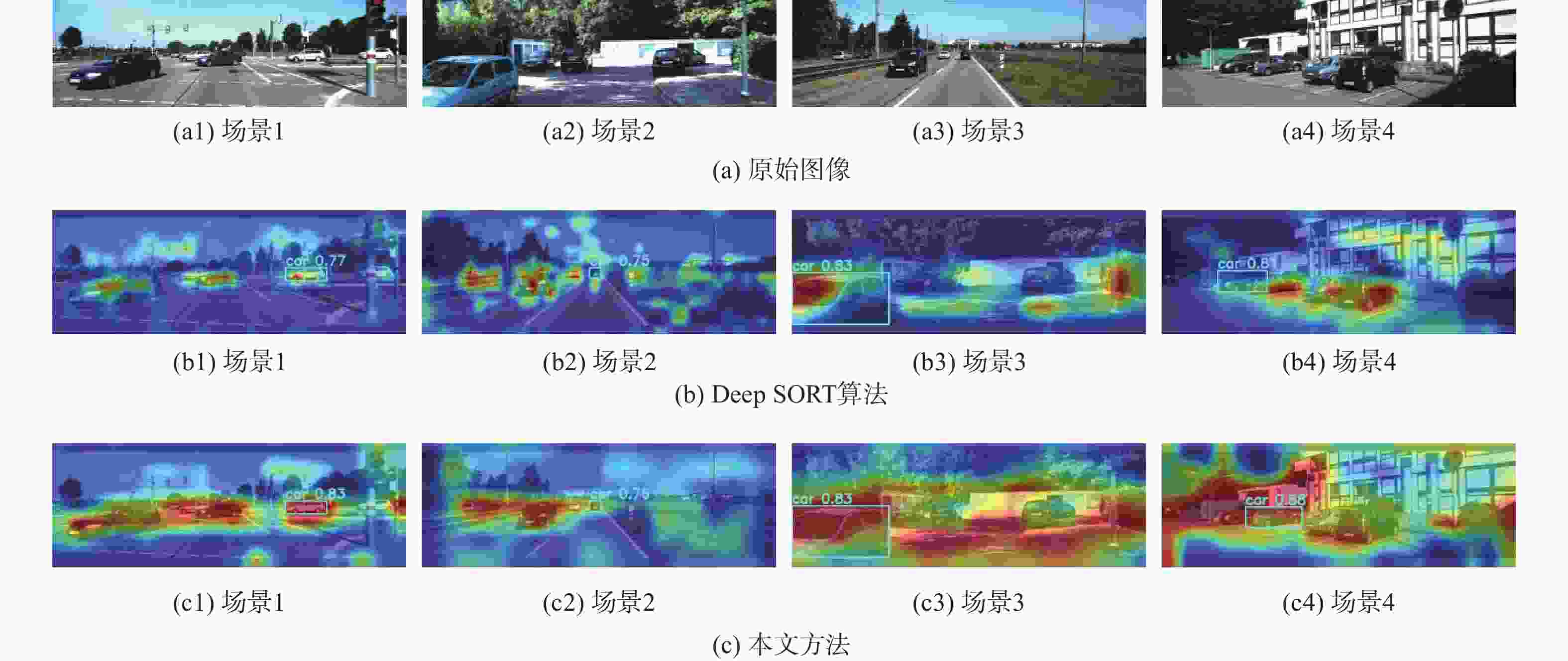
图 10 KITTI数据集场景车辆特征热力图
Figure 10. Heat map of vehicle characteristics for dataset scenarios of the KITTI
表 1 全尺度特征提取网络架构
Table 1. FSNet architecture
层 输出(h×w×c) 操作 conv1 128×64×64
64×32×647×7 conv,stride 2
3×3 max pooling,stride 2conv2 64×32×256 bottleneck×2 transition 64×32×256
32×16×2561×1 conv
2×2 average pooling,stride 2conv3 32×16×384 bottleneck×2 transition 32×16×384
16×8×3841×1 conv
2×2 average pooling,stride 2conv4 16×8×512 bottleneck×2 conv5 16×8×512 1×1 conv gap 1×1×512 global average pooling  下载: 导出CSV
下载: 导出CSV
表 2 全尺度特征提取网络训练参数
Table 2. FSNet training parameters
训练轮次 批处理大小 初始学习率 权重衰减系数 350 64 0.065 0.0005
下载: 导出CSV
表 3 消融实验
Table 3. Ablation experimental
模型 FSNet TCA MOTA/% ASSA/% HOTA/% A 87.37 73.59 72.18 B √ 89.33 73.77 75.42 C √ 87.31 77.89 75.11 D √ √ 90.81 78.27 78.13
下载: 导出CSV
表 4 不同算法在KITTI数据集测试结果
Table 4. Test results of different algorithms on KITTI dataset
算法 MOTA/% ASSA/% HOTA/% IDS次数 FPS Deep SORT 87.37 73.59 74.02 334 34.51 PermaTrack 90.85 77.66 77.42 275 11.86 OC SORT 90.28 76.39 76.54 250 29.04 StrongSORT 90.35 78.20 77.75 240 7.09 ByteTrack 90.43 76.14 76.60 361 29.63 BOT-SORT 90.72 78.19 77.95 248 6.58 本文方法 90.81 78.27 78.13 192 17.84
下载: 导出CSV
-
[1] PARK Y, DANG L M, LEE S, et al. Multiple object tracking in deep learning approaches: a survey[J]. Electronics, 2021, 10(19): 2406. doi: 10.3390/electronics10192406 [2] LUO W H, XING J L, MILAN A, et al. Multiple object tracking: a literature review[J]. Artificial Intelligence, 2021, 293: 103448. doi: 10.1016/j.artint.2020.103448 [3] 周雪, 梁超, 何均洋, 等. 一体化多目标跟踪算法研究综述[J]. 电子科技大学学报, 2022, 51(5): 728-736. doi: 10.12178/1001-0548.2021349ZHOU X, LIANG C, HE J Y, et al. A survey on one-shot multi-object tracking algorithm[J]. Journal of University of Electronic Science and Technology of China, 2022, 51(5): 728-736(in Chinese). doi: 10.12178/1001-0548.2021349 [4] 韩瑞泽, 冯伟, 郭青, 等. 视频单目标跟踪研究进展综述[J]. 计算机学报, 2022, 45(9): 1877-1907. doi: 10.11897/SP.J.1016.2022.01877HAN R Z, FENG W, GUO Q, et al. Single object tracking research: a survey[J]. Chinese Journal of Computers, 2022, 45(9): 1877-1907(in Chinese). doi: 10.11897/SP.J.1016.2022.01877 [5] DENDORFER P, OŠEP A, MILAN A, et al. MOTChallenge: a benchmark for single-camera multiple target tracking[J]. International Journal of Computer Vision, 2021, 129(4): 845-881. doi: 10.1007/s11263-020-01393-0 [6] CIAPARRONE G, LUQUE SÁNCHEZ F, TABIK S, et al. Deep learning in video multi-object tracking: a survey[J]. Neurocomputing, 2020, 381: 61-88. doi: 10.1016/j.neucom.2019.11.023 [7] EMAMI P, PARDALOS P M, ELEFTERIADOU L, et al. Machine learning methods for data association in multi-object tracking[J]. ACM Computing Surveys, 2020, 53(4): 1-34. [8] BEWLEY A, GE Z Y, OTT L, et al. Simple online and realtime tracking[C]//Proceedings of the IEEE International Conference on Image Processing. Piscataway: IEEE Press, 2016: 3464-3468. [9] WOJKE N, BEWLEY A, PAULUS D. Simple online and realtime tracking with a deep association metric[C]//Proceedings of the IEEE International Conference on Image Processing. Piscataway: IEEE Press, 2017: 3645-3649. [10] DU Y H, ZHAO Z C, SONG Y, et al. StrongSORT: make DeepSORT great again[J]. IEEE Transactions on Multimedia, 2023, 25: 8725-8737. doi: 10.1109/TMM.2023.3240881 [11] CAO J K, PANG J M, WENG X S, et al. Observation-centric SORT: rethinking SORT for robust multi-object tracking[EB/OL]. (2023-03-16)[2023-03-20]. https://arxiv.org/abs/2203.14360v3. [12] MAGGIOLINO G, AHMAD A, CAO J K, et al. Deep OC-sort: multi-pedestrian tracking by adaptive re-identification[C]//Proceedings of the IEEE International Conference on Image Processing. Piscataway: IEEE Press, 2023: 3025-3029. [13] AHARON N, ORFAIG R, BOBROVSKY B Z. BoT-SORT: robust associations multi-pedestrian tracking[EB/OL]. (2022-07-07)[2023-03-20]. https://arxiv.org/abs/2206.14651v2. [14] SEIDENSCHWARZ J, BRASÓ G, SERRANO V C, et al. Simple cues lead to a strong multi-object tracker[EB/OL]. (2022-06-09)[2023-03-20]. https://arxiv.org/abs/2206.04656v7. [15] YANG F, ODASHIMA S, MASUI S, et al. Hard to track objects with irregular motions and similar appearances? make it easier by buffering the matching space[C]//Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press, 2023: 4788-4797. [16] 马永杰, 马芸婷, 程时升, 等. 基于改进YOLOv3模型与Deep-SORT算法的道路车辆检测方法[J]. 交通运输工程学报, 2021, 21(2): 222-231.MA Y J, MA Y T, CHENG S S, et al. Road vehicle detection method based on improved YOLOv3 model and deep-SORT algorithm[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 222-231(in Chinese). -

 下载:
下载:













 点击查看大图
点击查看大图

计量
- 文章访问数: 254
- HTML全文浏览量: 39
- PDF下载量: 10
- 被引次数: 0
