



Online trajectory optimization method for vertical landing phase of reusable launch vehicle
-
摘要:
重复使用运载火箭垂直着陆段在制导中存在初始条件不确定、过程约束复杂和终端约束严苛的问题,针对这些问题,提出了一种结合凸优化和四次多项式制导的在线轨迹优化方法。采用考虑终端姿态约束和以燃料最优为目标的四次多项式制导方法,计算得到初始轨迹和终端着陆时间;根据不同的初始条件得到不同的轨迹和时间,确保在不同初始条件下凸优化均能求解成功。同时,将初始轨迹代入同样以燃料最优为目标的凸优化算法,得到制导指令并满足过程约束和终端约束条件,实现软着陆。仿真分析表明相比于常值凸优化算法,所提出的方法对不同偏差的适应性更好,着陆成功率更高,并且省略了着陆终端时间寻优的过程,求解效率更高,使用的燃料更少。
Abstract:In order to overcome the difficulties of ambiguous initial circumstances, intricate process constraints, and strict terminal restrictions in the guidance of reusable launch vehicles, this work suggests an online trajectory optimization technique that combines convex optimization and fourth-order polynomial guidance. The method utilizes a fourth-order polynomial guidance approach considering terminal attitude constraints and fuel optimality as the objective to compute the initial trajectory and terminal landing time. By considering different initial conditions, different trajectories and times are obtained to ensure a successful solution of convex optimization under varying circumstances. Additionally, by applying the initial trajectory to a convex optimization algorithm with the same fuel optimality objective, guidance commands are generated to satisfy process constraints and terminal constraints, enabling a soft landing. Simulation analysis demonstrates that the proposed method exhibits better adaptability and higher reliability to different deviations compared to constant convex optimization algorithms. Furthermore, by doing away with the need to optimize terminal landing time, the suggested approach increases solution efficiency and lowers fuel consumption.
-
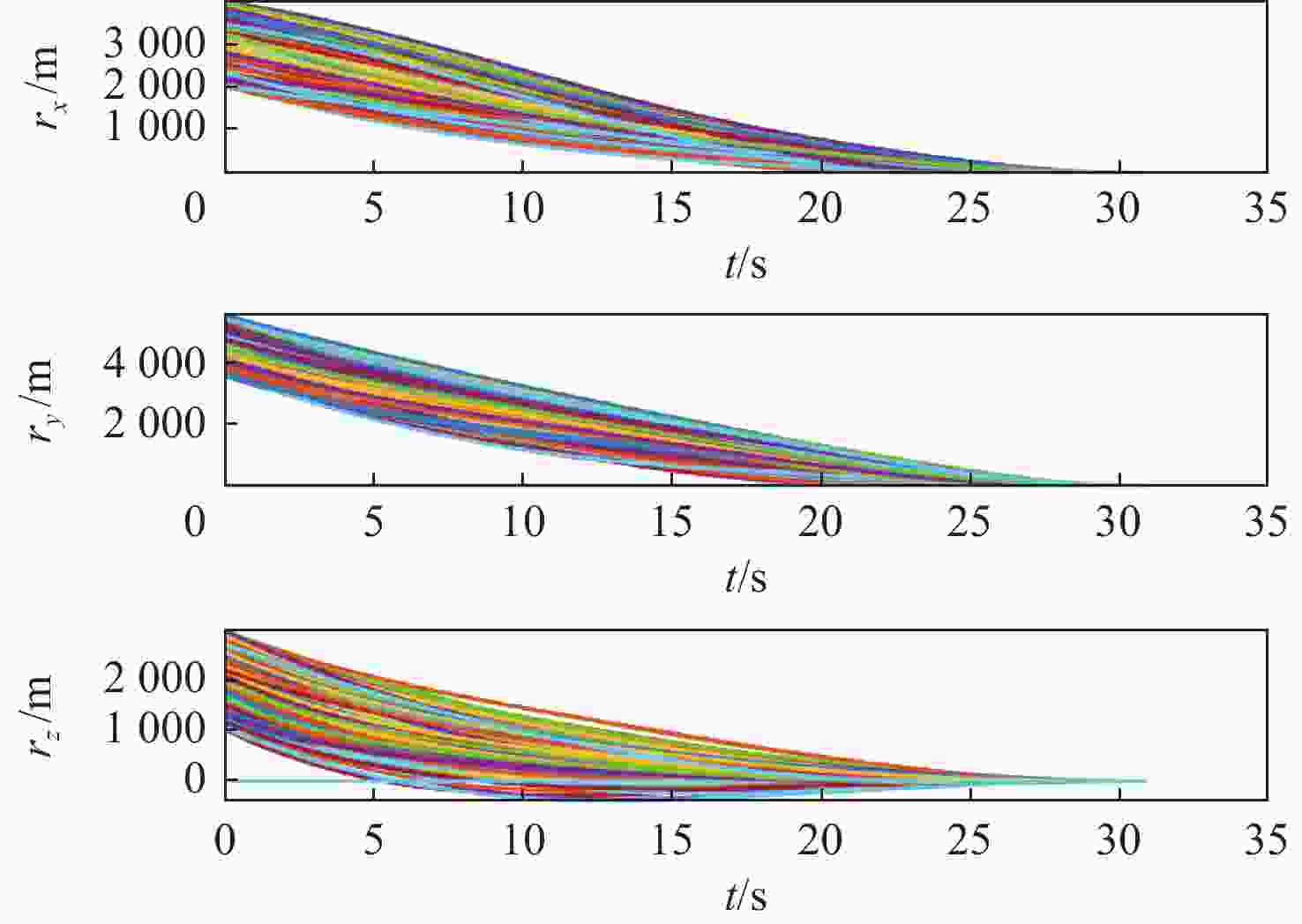
图 1 使用常值凸优化的火箭位置蒙特卡罗打靶曲线
Figure 1. Rocket position Monte-Carlo hitting curve with constant convex optimization
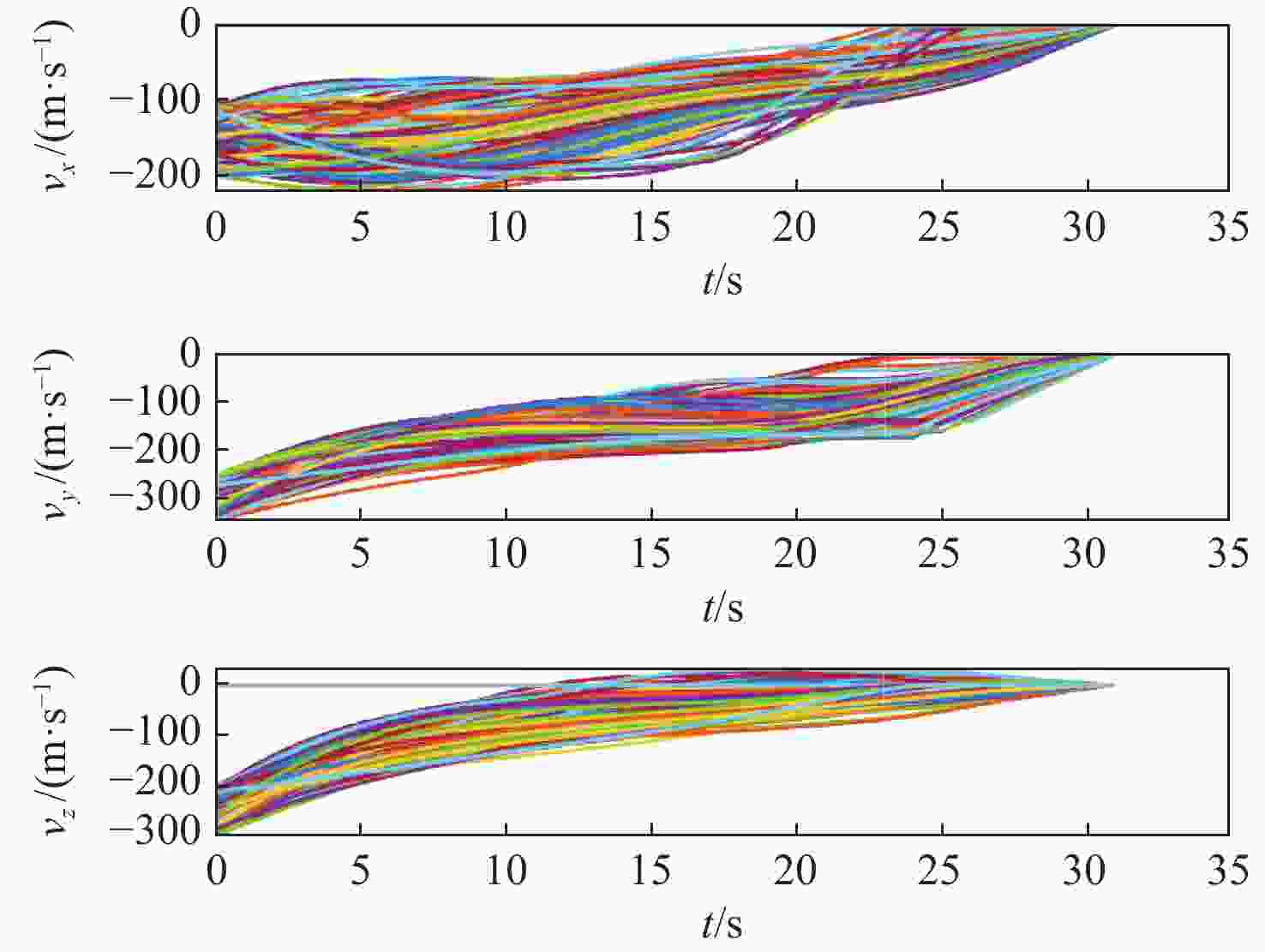
图 2 使用常值凸优化的火箭速度蒙特卡罗打靶曲线
Figure 2. Rocket velocity Monte-Carlo hitting curve with constant convex optimization
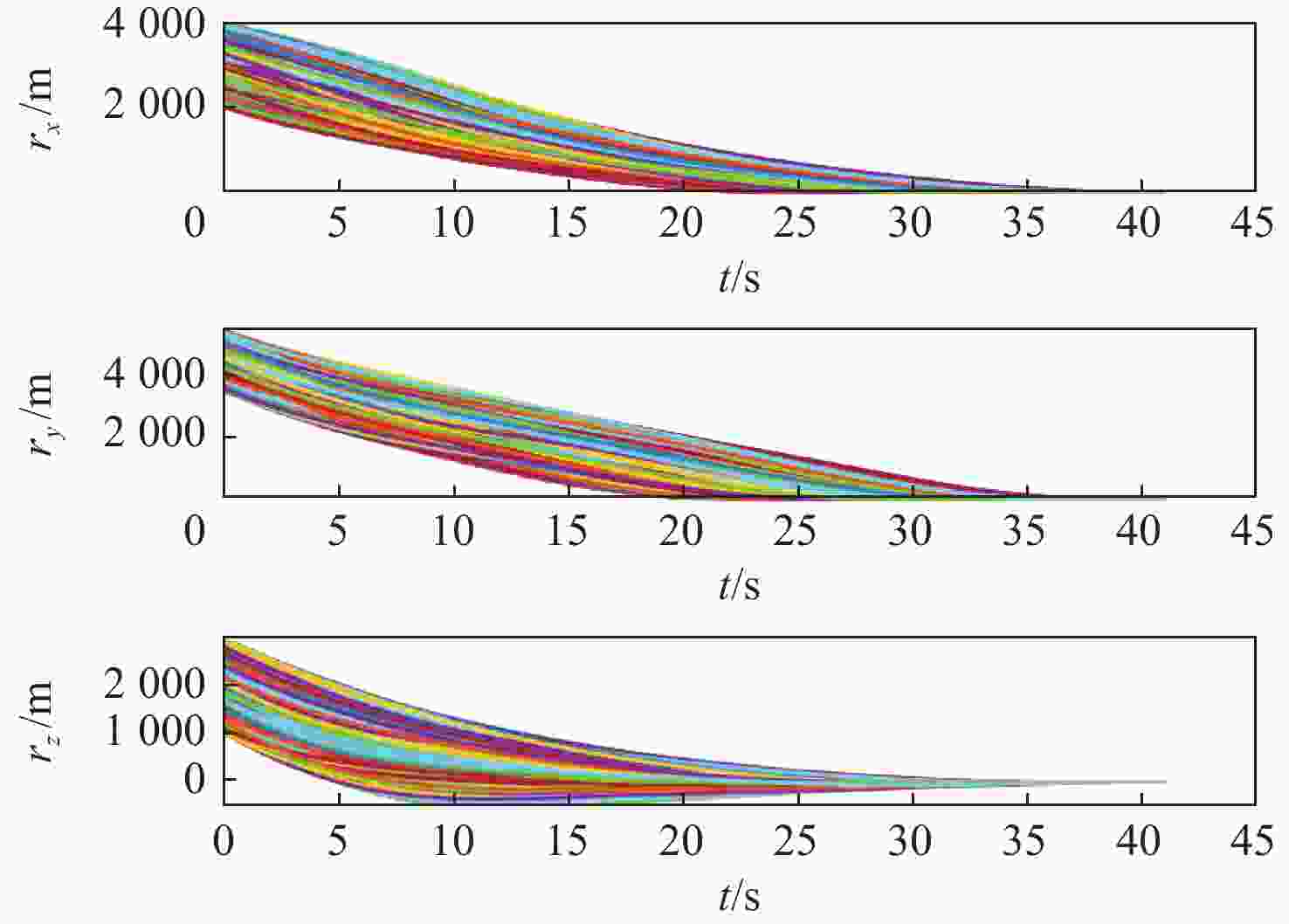
图 3 使用本文算法的火箭位置蒙特卡罗打靶曲线
Figure 3. Rocket position Monte-Carlo hitting curve utilizing the algorithm in this paper
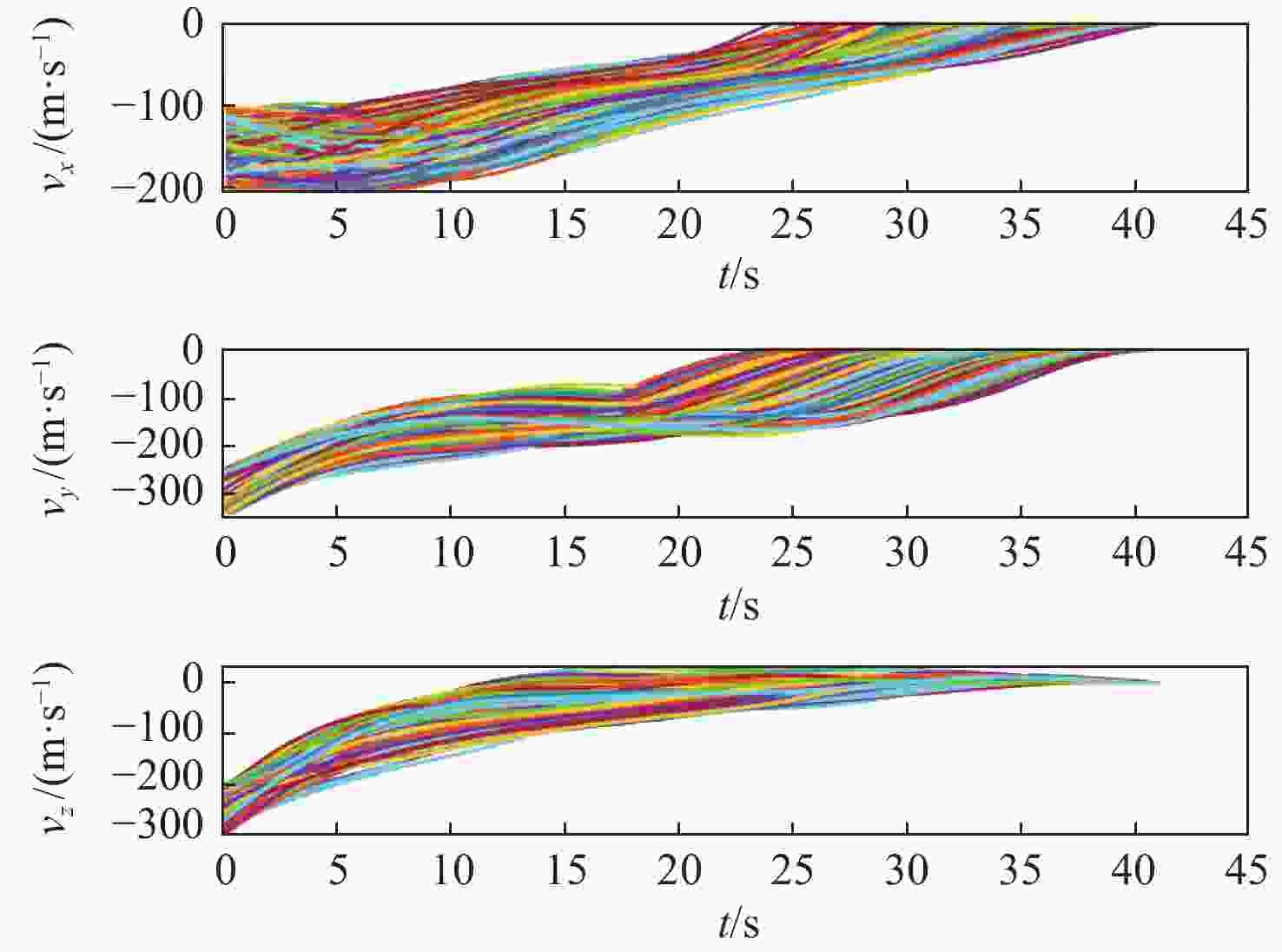
图 4 使用本文算法的火箭速度蒙特卡罗打靶曲线
Figure 4. Rocket velocity Monte-Carlo hitting curve utilizing the algorithm in this paper
图 5 火箭终端位置蒙特卡罗打靶结果统计对比
Figure 5. Statistical comparison of rocket position Monte-Carlo hitting results
图 6 火箭终端速度蒙特卡罗打靶结果统计对比
Figure 6. Statistical comparison of rocket terminal velocity Monte-Carlo hitting results
图 8 火箭一子级三轴速度曲线
Figure 8. The three-axis velocity curve of the first sub-stage of the rocket
图 11 火箭一子级质量变化曲线
Figure 11. The mass change curve of the first sub-stage of the rocket
表 1 凸优化方案流程表
Table 1. Convex optimization scheme flow table
步骤 内容 STEP1 获取着陆段初始位置和速度信息 STEP2 四次多项式制导求解初始轨迹${\boldsymbol{x}}_k^0$ ($k = 1,2, \cdots ,N$),并给定终端时间${t_{\rm f}}$ STEP3 根据前一次的状态量${\boldsymbol{x}}_k^{i - 1}$凸优化求解式(23)得到控制量${\boldsymbol{u}}_k^i$ STEP4 控制量${\boldsymbol{u}}_k^i$代入动力学模型式(1)积分得到真实状态量${\boldsymbol{x}}_k^i$,$i = i + 1$ STEP5 If ${\boldsymbol{x}}_k^i$不满足终止约束条件
跳到STEP3
else ${\boldsymbol{x}}_k^i$满足终止约束条件
${\boldsymbol{x}}_k^i$,${\boldsymbol{u}}_k^i$即为可行解 下载: 导出CSV
下载: 导出CSV
表 2 Falcon火箭一子级部分参数
Table 2. Partial parameters of a sub-stage of Falcon rocket
火箭参数 取值 火箭参数 取值 ${{{m_{{\text{fuel}}}}} \mathord{\left/ {\vphantom {{{m_{{\text{fuel}}}}} {{\text{kg}}}}} \right. } {{\text{kg}}}}$ 12230 ${{{{\boldsymbol{r}}_0}} \mathord{\left/ {\vphantom {{{{\boldsymbol{r}}_0}} {{\text{km}}}}} \right. } {{\text{km}}}}$ [3 4.5 2.6]T ${{{m_{{\text{dry}}}}} \mathord{\left/ {\vphantom {{{m_{{\text{dry}}}}} {{\text{kg}}}}} \right. } {{\text{kg}}}}$ 22200 ${{{{\boldsymbol{v}}_0}} \mathord{\left/ {\vphantom {{{{\boldsymbol{v}}_0}} {{\text{(m}} \cdot {{\text{s}}^{ - 1}})}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 1}})}}$ [−150 −320 −260]T ${{{m_{{\text{wet}}}}} \mathord{\left/ {\vphantom {{{m_{{\text{wet}}}}} {{\text{kg}}}}} \right. } {{\text{kg}}}}$ 34530 ${{{S_{{\text{ref}}}}} \mathord{\left/ {\vphantom {{{S_{{\text{ref}}}}} {{{\text{m}}^2}}}} \right. } {{{\text{m}}^2}}}$ 10 ${{{g_0}} \mathord{\left/ {\vphantom {{{g_0}} {{\text{(m}} \cdot {{\text{s}}^{ - 2}}}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 2}}}})$ 9.8 ${C_{\mathrm{D}}}$ 2.2 ${{{T_{{\text{max}}}}} \mathord{\left/ {\vphantom {{{T_{{\text{max}}}}} {{\text{kN}}}}} \right. } {{\text{kN}}}}$ 845 ${{{I_{\rm sp}}} \mathord{\left/ {\vphantom {{{I_{\rm sp}}} {({\text{m}} \cdot {{\text{s}}^{ - 1}}}}} \right. } {({\text{m}} \cdot {{\text{s}}^{ - 1}}}})$ 282 ${{{T_{{\text{min}}}}} \mathord{\left/ {\vphantom {{{T_{{\text{min}}}}} {{\text{kN}}}}} \right. } {{\text{kN}}}}$ 0 ${{{\rho _0}} \mathord{\left/ {\vphantom {{{\rho _0}} {({\text{kg}} \cdot {{\text{m}}^{ - 3}}}}} \right. } {({\text{kg}} \cdot {{\text{m}}^{ - 3}}}})$ 1.225 ${{\Delta {T_{{\text{max}}}}} \mathord{\left/ {\vphantom {{\Delta {T_{{\text{max}}}}} {{\text{kN}}}}} \right. } {{\text{kN}}}}$ 100 ${\beta \mathord{\left/ {\vphantom {\beta {{{\text{m}}^{ - 1}}}}} \right. } {{{\text{m}}^{ - 1}}}}$ 1.3785 ×10−4
下载: 导出CSV
表 3 蒙特卡罗打靶初始条件设定范围
Table 3. Monte Carlo targeting initial condition setting range
偏差项 初始条件范围 偏差项 初始条件范围 ${{{{\boldsymbol{r}}_x}} \mathord{\left/ {\vphantom {{{{\boldsymbol{r}}_x}} {{\text{km}}}}} \right. } {{\text{km}}}}$ $\left[ {2,4} \right]$ ${{{m_{{\text{wet}}}}} \mathord{\left/ {\vphantom {{{m_{{\text{wet}}}}} {{\text{kg}}}}} \right. } {{\text{kg}}}}$ 均值 34530
标准差 500${{{{\boldsymbol{r}}_y}} \mathord{\left/ {\vphantom {{{{\boldsymbol{r}}_y}} {{\text{km}}}}} \right. } {{\text{km}}}}$ $\left[ {3.5,5.5} \right]$ ${{{I_{\rm sp}}} \mathord{\left/ {\vphantom {{{I_{\rm sp}}} {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}})$ $\left[ {270,290} \right]$ ${{{{\boldsymbol{r}}_{\textit{z}}}} \mathord{\left/ {\vphantom {{{{\boldsymbol{r}}_{\textit{z}}}} {{\text{km}}}}} \right. } {{\text{km}}}}$ $\left[ {1,3} \right]$ ${{{\rho _0}} \mathord{\left/ {\vphantom {{{\rho _0}} {{\text{(kg}} \cdot {{\text{m}}^{ - 3}}}}} \right. } {{\text{(kg}} \cdot {{\text{m}}^{ - 3}}}})$ $\left[ {1,1.5} \right]$ ${{{{\boldsymbol{v}}_x}} \mathord{\left/ {\vphantom {{{{\boldsymbol{v}}_x}} {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}})$ $\left[ { - 200, - 100} \right]$ ${{{{\boldsymbol{v}}_{\textit{z}}}} \mathord{\left/ {\vphantom {{{{\boldsymbol{v}}_{\textit{z}}}} {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}})$ $\left[ { - 300, - 200} \right]$ ${{{{\boldsymbol{v}}_y}} \mathord{\left/ {\vphantom {{{{\boldsymbol{v}}_y}} {{\text{(m}} \cdot {{\text{s}}^{ - 1}})}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 1}})}}$ $\left[ { - 350, - 250} \right]$
下载: 导出CSV
表 4 火箭子级垂直着陆段蒙特卡罗打靶结果统计
Table 4. Statistical table of Monte Carlo shooting results of rocket substage vertical landing section
参数 ${{{r_x}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{r_x}\left( {{t_{\rm f}}} \right)} {\text{m}}}} \right. } {\text{m}}}$ ${{{r_y}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{r_y}\left( {{t_{\rm f}}} \right)} {\text{m}}}} \right. } {\text{m}}}$ ${{{r_{\textit{z}}}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{r_{\textit{z}}}\left( {{t_{\rm f}}} \right)} {\text{m}}}} \right. } {\text{m}}}$ ${{{v_x}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{v_x}\left( {{t_{\rm f}}} \right)} {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}})$ ${{{v_y}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{v_y}\left( {{t_{\rm f}}} \right)} {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}})$ ${{{v_{\textit{z}}}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{v_{\textit{z}}}\left( {{t_{\rm f}}} \right)} {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}}} \right. } {{\text{(m}} \cdot {{\text{s}}^{ - 1}}}})$ ${{\Delta m} \mathord{\left/ {\vphantom {{\Delta m} {{\text{kg}}}}} \right. } {{\text{kg}}}}$ 均值 3.42×10−5 2.70×10−4 4.87×10−5 2.42×10−7 1.39×10−5 1.53×10−6 4696.2 标准差 5.93×10−5 3×10−4 8.82×10−5 1.18×10−6 1.76×10−5 2.13×10−6 667.01 极值 4.12×10−4 0.0027 0.001 1.14×10−5 1.33×10−4 1.81×10−5 6294.7
下载: 导出CSV
表 5 四次多项式凸优化与常值凸优化对比
Table 5. Quadratic polynomial convex optimization vs. constant convex optimization
参数 四次多项式凸优化 常值凸优化 ${{{r_x}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{r_x}\left( {{t_{\rm f}}} \right)} {\text{m}}}} \right. } {\text{m}}}$ 1.27×10−5 2.98×10−5 ${{{r_y}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{r_y}\left( {{t_{\rm f}}} \right)} {\text{m}}}} \right. } {\text{m}}}$ −9.75×10−5 −1.85×10−4 ${{{r_{\textit{z}}}\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{{r_{\textit{z}}}\left( {{t_{\rm f}}} \right)} {\text{m}}}} \right. } {\text{m}}}$ −4.76×10−6 −1.18×10−5 $ {v}_{x}\left({t}_{\rm f}\right)/\text{(m} \cdot {\text{s}}^{-1}) $ 1.71×10−7 8.31×10−7 $ {v}_{y}\left({t}_{\rm f}\right)/\text{(m} \cdot {\text{s}}^{-1}) $ −3.93×10−6 −4.89×10−6 $ {v}_{z}\left({t}_{\rm f}\right)/(\mathrm{m} \cdot {s}^{-1}) $ −3.09×10−7 −5.69×10−7 ${{m\left( {{t_{\rm f}}} \right)} \mathord{\left/ {\vphantom {{m\left( {{t_{\rm f}}} \right)} {{kg} }}} \right. } {{{\mathrm{kg}}} }}$ 30104.06 30047.02 求解时间/s 12.63 16.38
下载: 导出CSV
-
[1] BONO P. Rombus-an integrated systems concept for a reusable orbital module/booster and utility shuttle [C]//Summer Meeting. 1963: 271. [2] 吴荣. 垂直起降可重复使用火箭返回制导与控制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2019.WU R. Research on guidance and control method of vertical take-off and landing reusable rocket return[D]. Harbin: Harbin Institute of Technology, 2019(in Chinese). [3] 宋征宇, 蔡巧言, 韩鹏鑫, 等. 重复使用运载器制导与控制技术综述[J]. 航空学报, 2021, 42(11): 525050.SONG Z Y, CAI Q Y, HAN P X, et al. Review of guidance and control technologies for reusable launch vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 525050(in Chinese). [4] KLUMPP A R. Apollo lunar descent guidance[J]. Automatica, 1974, 10(2): 133-146. [5] 张洪华, 关轶峰, 黄翔宇, 等. 嫦娥三号着陆器动力下降的制导导航与控制[J]. 中国科学: 技术科学, 2014, 44(4): 377-384.ZHANG H H, GUAN Y F, HUANG X Y, et al. Guidance navigation and control for Chang’E-3 powered descent[J]. Scientia Sinica (Technologica), 2014, 44(4): 377-384(in Chinese). [6] 韦常柱, 琚啸哲, 徐大富, 等. 垂直起降重复使用运载器返回制导与控制[J]. 航空学报, 2019, 40(7): 322782.WEI C Z, JU X Z, XU D F, et al. Guidance and control for return process of vertical takeoff vertical landing reusable launching vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(7): 322782(in Chinese). [7] 张康. 火箭子级垂直回收轨迹优化与制导研究[D]. 长沙: 国防科技大学, 2018.ZHANG K. Research on optimization and guidance of rocket sub-stage vertical recovery trajectory[D]. Changsha: National University of Defense Technology, 2018(in Chinese). [8] ACIKMESE B, PLOEN S R. Convex programming approach to powered descent guidance for Mars landing[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(5): 1353-1366. [9] SCHARF D P, REGEHR M W, VAUGHAN G M, et al. ADAPT demonstrations of onboard large-divert Guidance with a VTVL rocket[C]//2014 IEEE Aerospace Conference. Piscataway: IEEE Press, 2014: 1-18. [10] 张志国, 马英, 耿光有, 等. 火箭垂直回收着陆段在线制导凸优化方法[J]. 弹道学报, 2017, 29(1): 9-16.ZHANG Z G, MA Y, GENG G Y, et al. Convex optimization method used in the landing-phase on-line guidance of rocket vertical recovery[J]. Journal of Ballistics, 2017, 29(1): 9-16(in Chinese). [11] WANG J B, CUI N G, WEI C Z. Optimal rocket landing guidance using convex optimization and model predictive control[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(5): 1078-1092. [12] 吴杰, 张成, 李淼, 等. 基于凸优化和LQR的火箭返回轨迹跟踪制导[J]. 北京航空航天大学学报, 2022, 48(11): 2270-2280.WU J, ZHANG C, LI M, et al. Rocket return trajectory tracking guidance based on convex optimization and LQR[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2270-2280(in Chinese). [13] 安泽, 熊芬芬, 梁卓楠. 基于偏置比例导引与凸优化的火箭垂直着陆制导[J]. 航空学报, 2020, 41(5): 323606.AN Z, XIONG F F, LIANG Z N. Landing-phase guidance of rocket using bias proportional guidance and convex optimization[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 323606(in Chinese). [14] SAGLIANO M, HEIDECKER A, MACÉS HERNÁNDEZ J, et al. Onboard guidance for reusable rockets: aerodynamic descent and powered landing[C]//AIAA Scitech 2021 Forum. Reston: AIAA, 2021: 0862. [15] LIU X F. Fuel-optimal rocket landing with aerodynamic controls[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(1): 65-77. [16] WANG J B, LI H X, CHEN H B. An iterative convex programming method for rocket landing trajectory optimization[J]. The Journal of the Astronautical Sciences, 2020, 67(4): 1553-1574. [17] MA L, WANG K X, XU Z H, et al. Optimal feedback guidance for powered landing of reusable rockets[C]//2019 Chinese Control and Decision Conference (CCDC). Piscataway: IEEE, 2019: 915-920. [18] 何林坤, 张冉, 龚庆海. 基于强化学习的可回收运载火箭着陆制导[J]. 空天防御, 2021, 4(3): 33-40.HE L K, ZHANG R, GONG Q H. Landing guidance of reusable launch vehicle based on reinforcement learning[J]. Air & Space Defense, 2021, 4(3): 33-40(in Chinese). [19] 郭超. 基于凸优化的火箭垂直返回精确着陆轨迹在线优化[D]. 哈尔滨: 哈尔滨工业大学, 2020.GUO C. On-line optimization of rocket vertical return accurate landing trajectory based on convex optimization[D]. Harbin: Harbin Institute of Technology, 2020(in Chinese). [20] BLACKMORE L, ACIKMESE B, SCHARF D P. Minimum-landing-error powered-descent guidance for Mars landing using convex optimization[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(4): 1161-1171. -

 下载:
下载:











 点击查看大图
点击查看大图

计量
- 文章访问数: 571
- HTML全文浏览量: 159
- PDF下载量: 62
- 被引次数: 0
