



Simulation analysis of human-machine closed-loop dynamics of aircraft landing and taxiing attitude under crosswind and wet runway conditions
-
摘要:
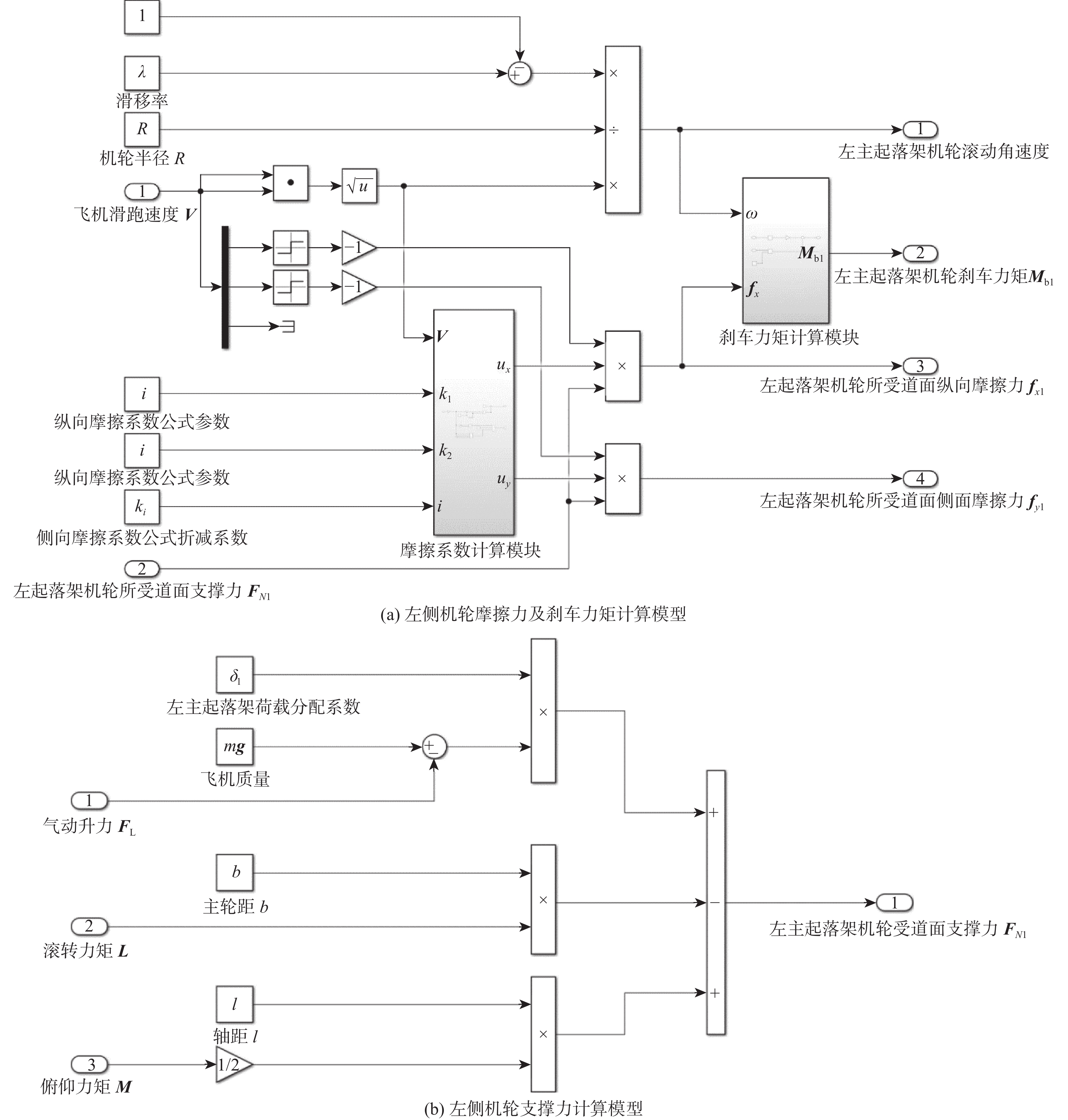
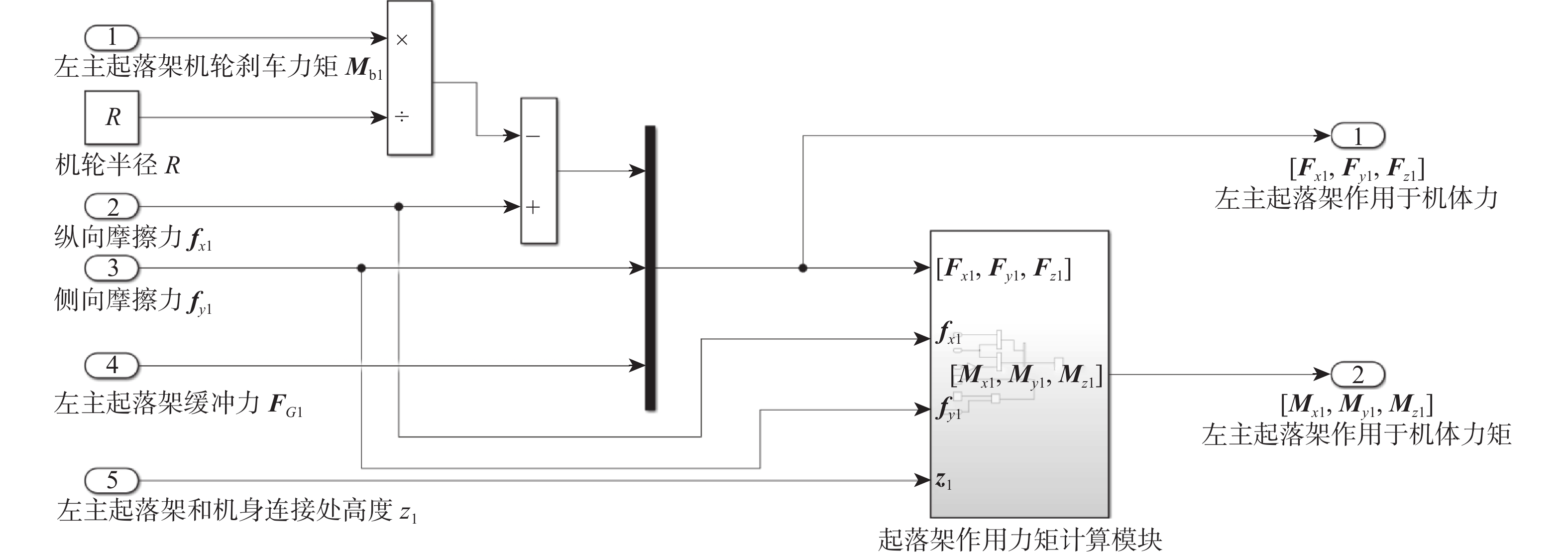
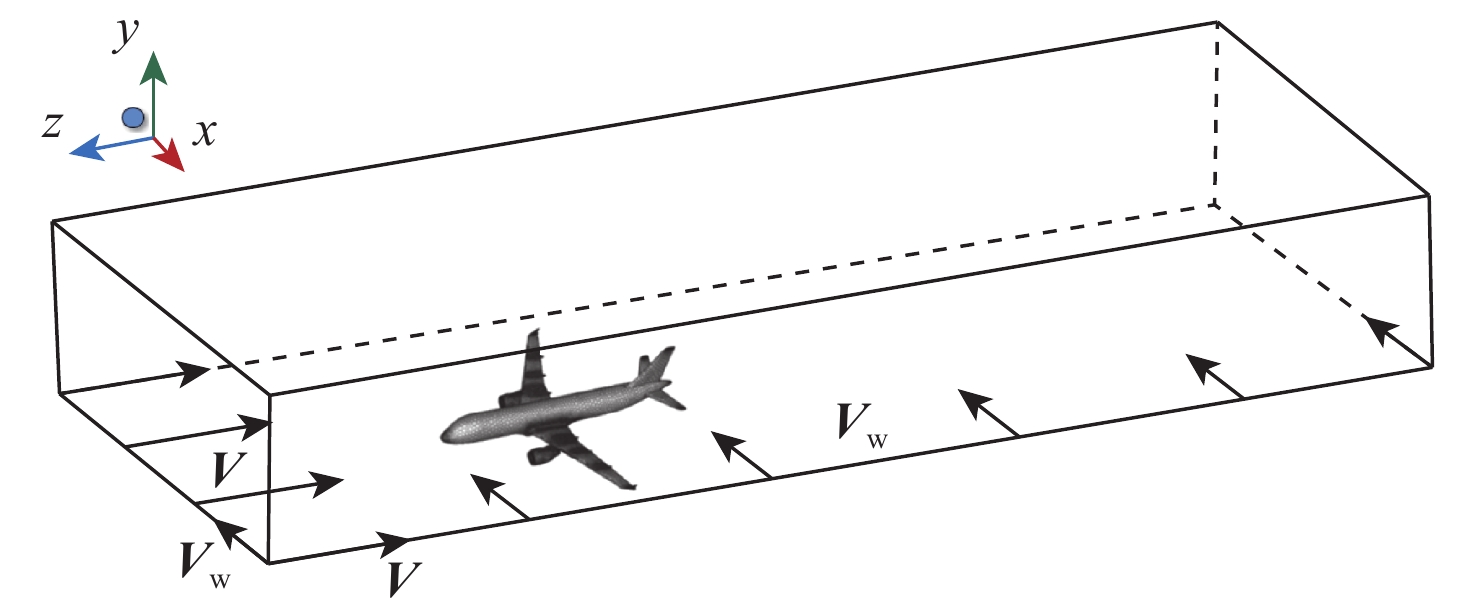
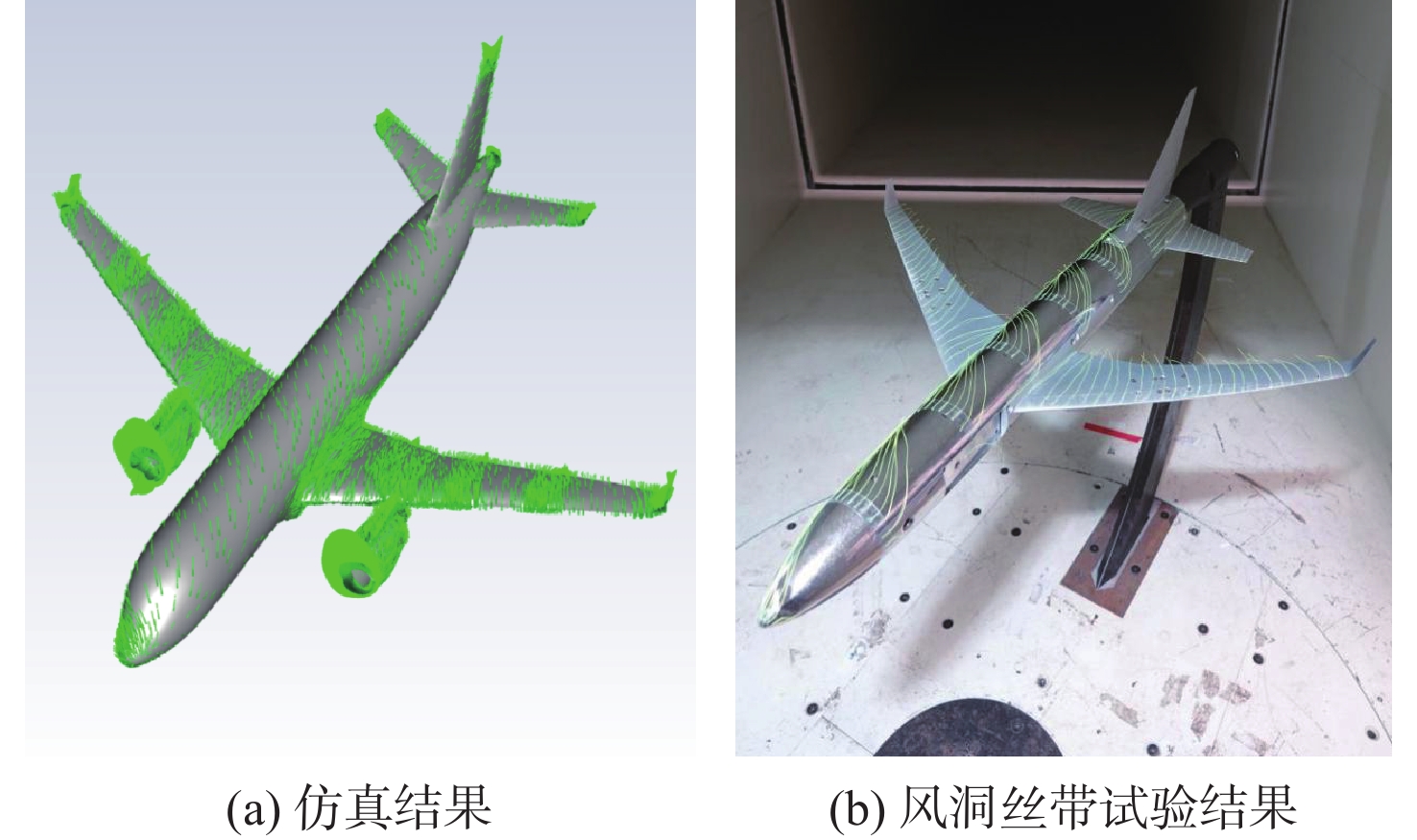
针对飞机在侧风湿滑条件下着陆滑跑易偏出跑道的问题,以民用客机A320为研究对象,利用Simulink建立了基于轮胎-湿滑道面相互作用的飞机着陆滑跑动力学模型,并基于该模型进行湿滑道面和侧风条件下的飞机着陆滑跑人机闭环仿真。对不同积水厚度、不平衡摩阻及侧风强度下的飞机着陆滑跑姿态和偏航距离进行分析,结果表明:积水厚度对飞机的侧向操纵性影响较大,较大的积水厚度会导致偏航角的峰值和终值均增大,进而使偏航距离和滑跑距离均大幅增加;10 mm及以上的道面积水厚度会使飞机在着陆滑跑的后期产生滚转振荡,极大影响飞机的侧向稳定性;道面摩阻不平衡对偏出跑道事故的影响较大,最大偏航距离达24.75 m,飞机已偏出跑道,极大影响飞机着陆滑跑的安全性;侧风强度越大,驾驶员对飞机的姿态操纵效果越差;当侧风强度增加至13.9 m/s时,滚转角在滑跑的第7.7 s便超过6°的安全限值,此时飞机的发动机或翼尖可能已经触地,其峰值达到6.57°,但此侧风强度条件下的偏航距离未超过跑道半幅宽度,可见侧风强度对飞机滚转角有着较大影响,且影响程度远超其对偏航距离的影响。在湿滑跑道管理中,应对积水厚度给予严格的13 mm禁止起降的管理,同时侧风也应小于13.9 m/s。
Abstract:Aiming at the problem that the aircraft is easy to deviate from the runway when landing and taxiing under slippery crosswind conditions, this paper takes the large civil aircraft A320 as the research object and uses Simulink to establish a dynamic model of aircraft landing and taxiing, including four components: wheels, landing gear, aircraft body, and pilot. Based on this model, a human-machine closed-loop simulation of aircraft taxiing under wet runway and crosswind conditions is conducted. An analysis is carried out on the landing roll attitude and yaw distance of the aircraft under different water film thicknesses, unbalanced friction, and crosswind intensities. The following conclusions are drawn: the water film thickness has a significant impact on the lateral controllability of the aircraft. A larger water thickness leads to increased peak and final values of the yaw angle, thus significantly increasing both the yaw distance and roll distance. A water film thickness of 10 mm or more can cause roll oscillations during the later stages of landing and taxiing, which greatly affects the aircraft’s lateral stability. Pavement friction imbalance has a considerable impact on runway excursion risk, with the maximum yaw distance reaching 24.75 m. The aircraft has already deviated from the runway, severely compromising landing and taxiing safety. The stronger the crosswind, the less effective the pilot’s attitude control becomes. When the crosswind speed increases to 13.9 m/s, the roll angle exceeds the safety threshold of 6° at 7.7 seconds into the taxiing phase. At this point, the aircraft’s engine or wingtip may have touched the ground, and the roll angle peaks at 6.57°. However, under this crosswind intensity, the yaw distance does not exceed half the width of the runway. This indicates that crosswind intensity has a significant effect on roll angle, far exceeding its impact on yaw distance. In wet runway management, strict control should be applied to water film thickness, with takeoff and landing prohibited at or above 13 mm, and crosswind speeds should be kept below 13.9 m/s.
-
Key words:
- wet runway /
- crosswind /
- human-machine closed-loop /
- runway excursion /
- aircraft attitude
-
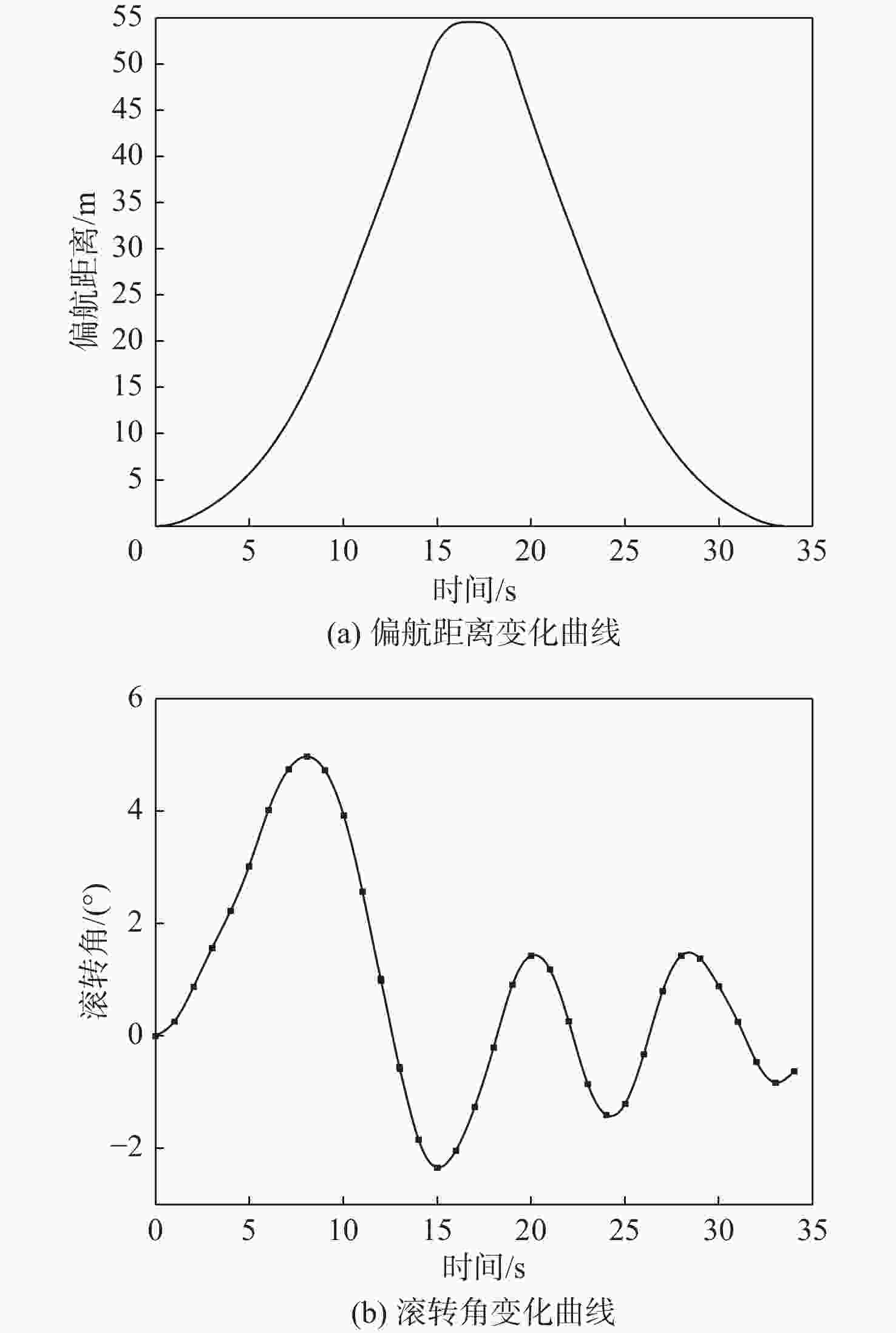
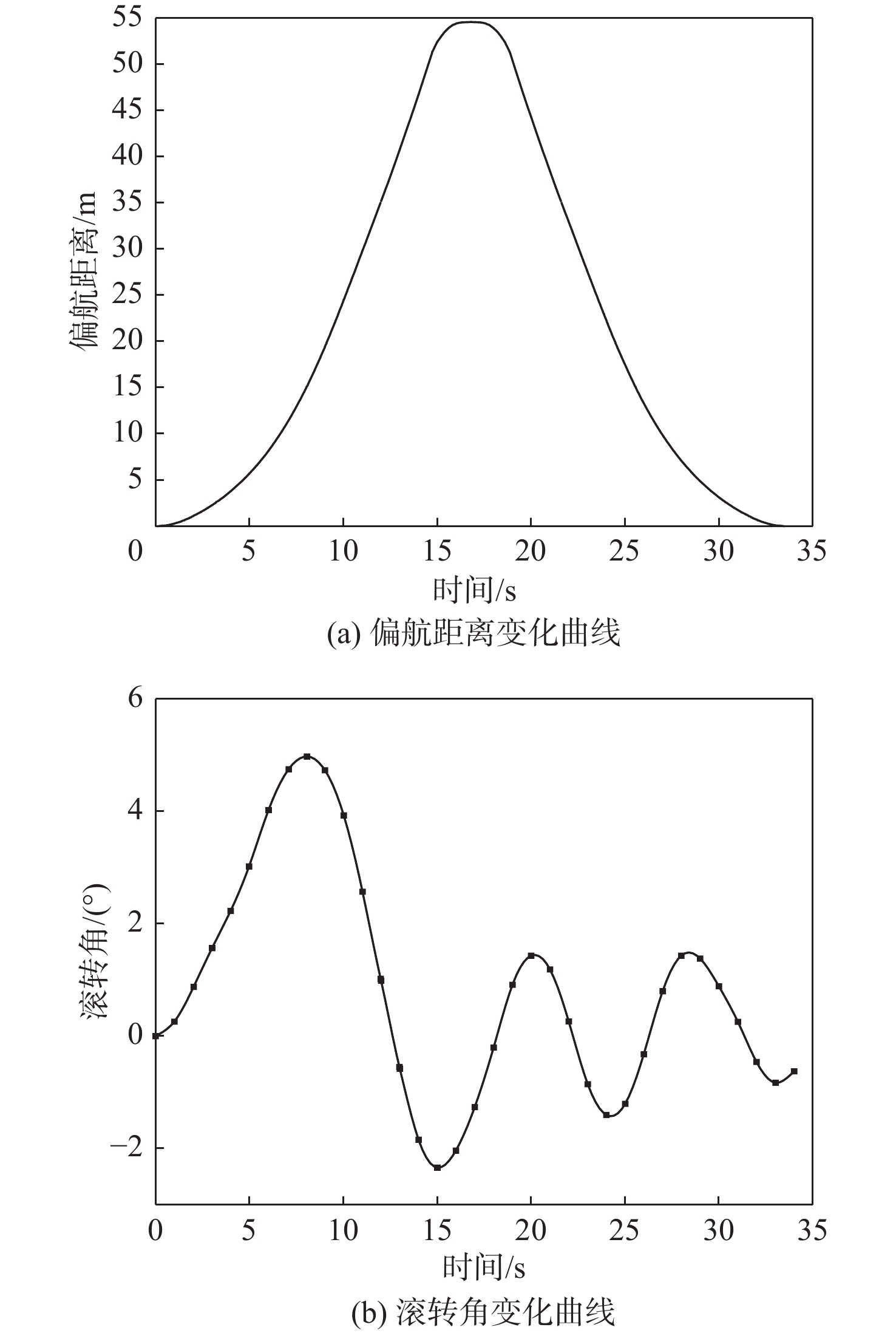
图 9 飞机偏航距离及姿态角计算结果
Figure 9. Calculation results of yaw distance and attitude angles of aircraft
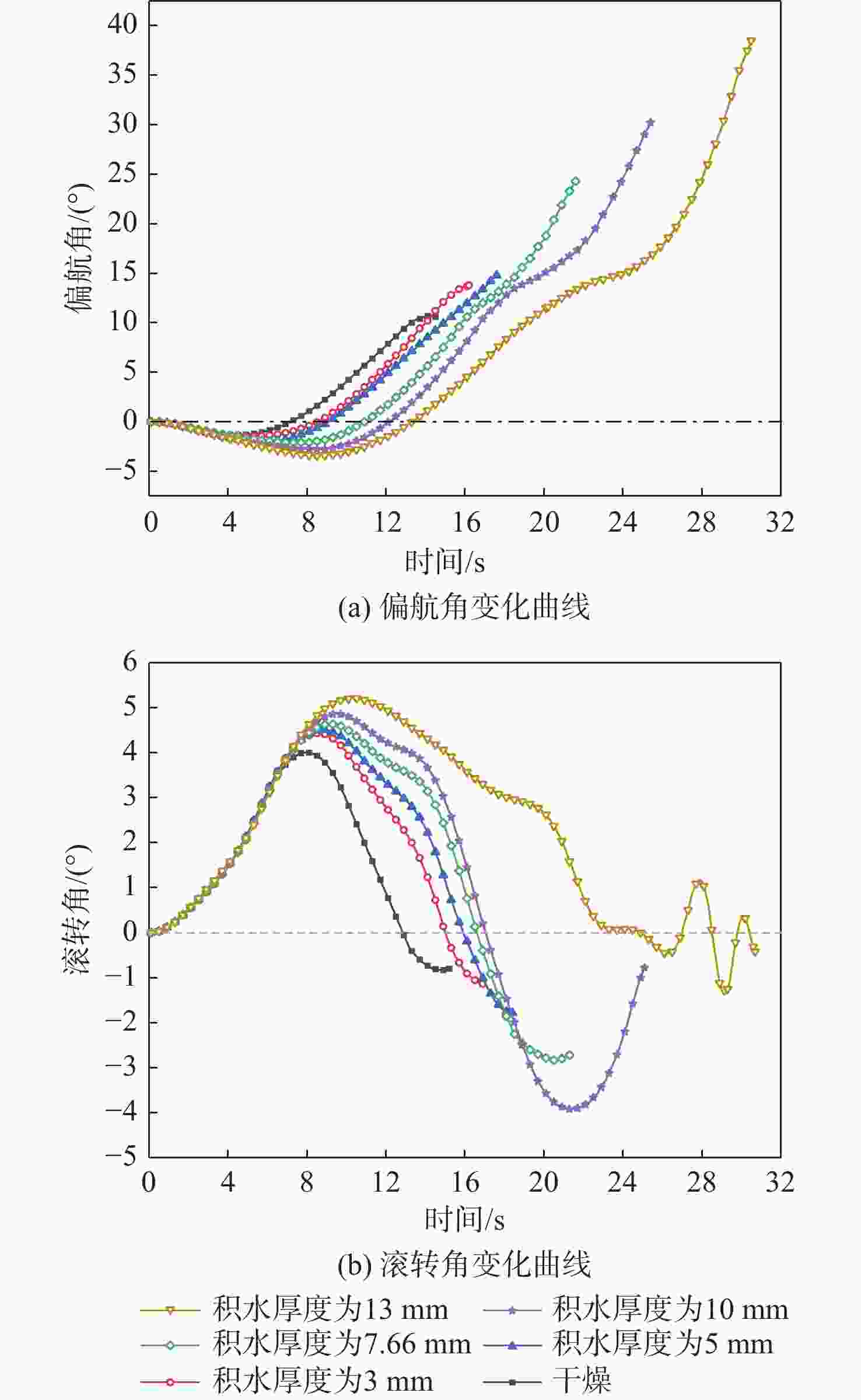
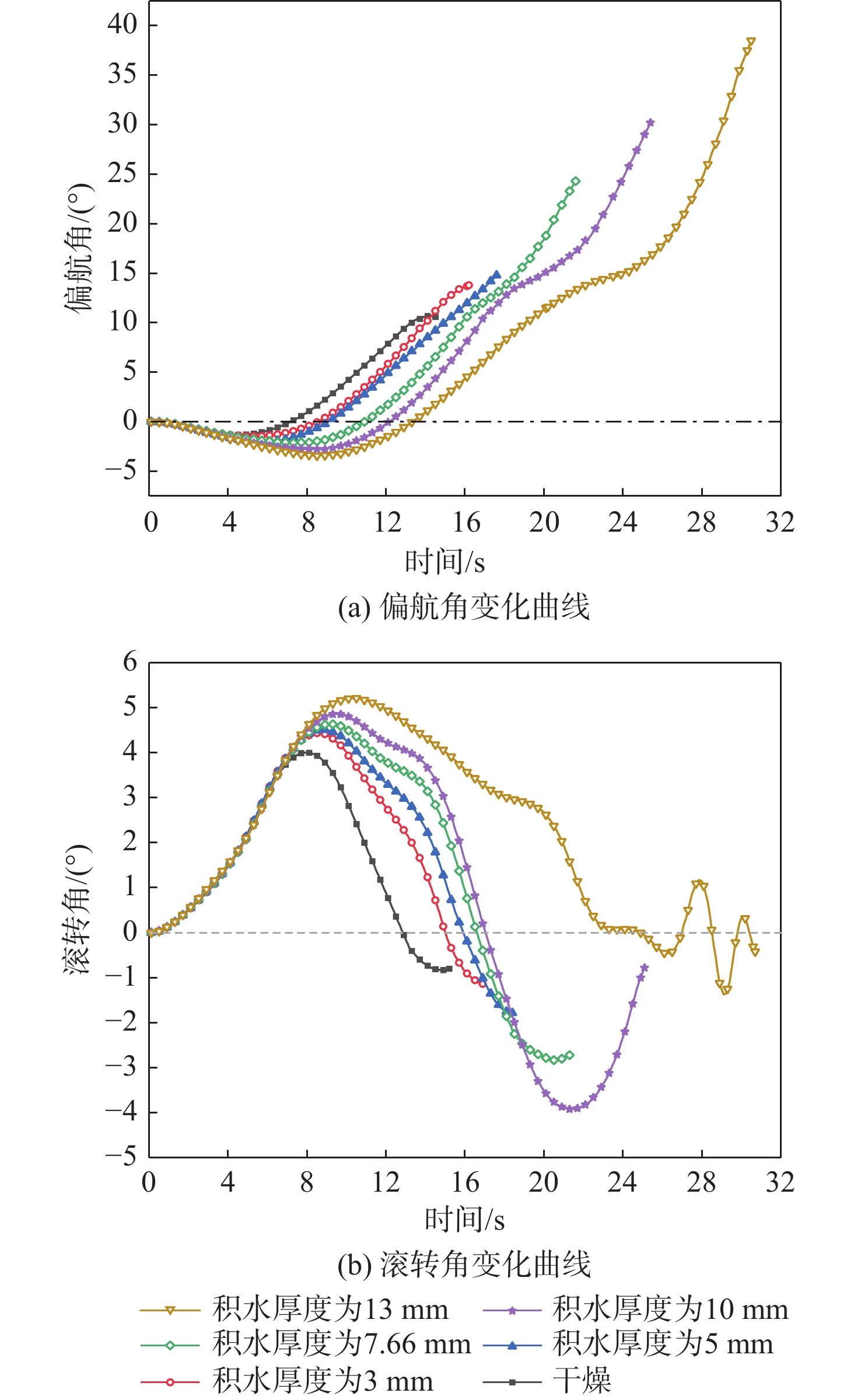
图 10 积水厚度对飞机着陆滑跑姿态角的影响
Figure 10. Effect of water film thickness on aircraft landing and taxiing attitude angles
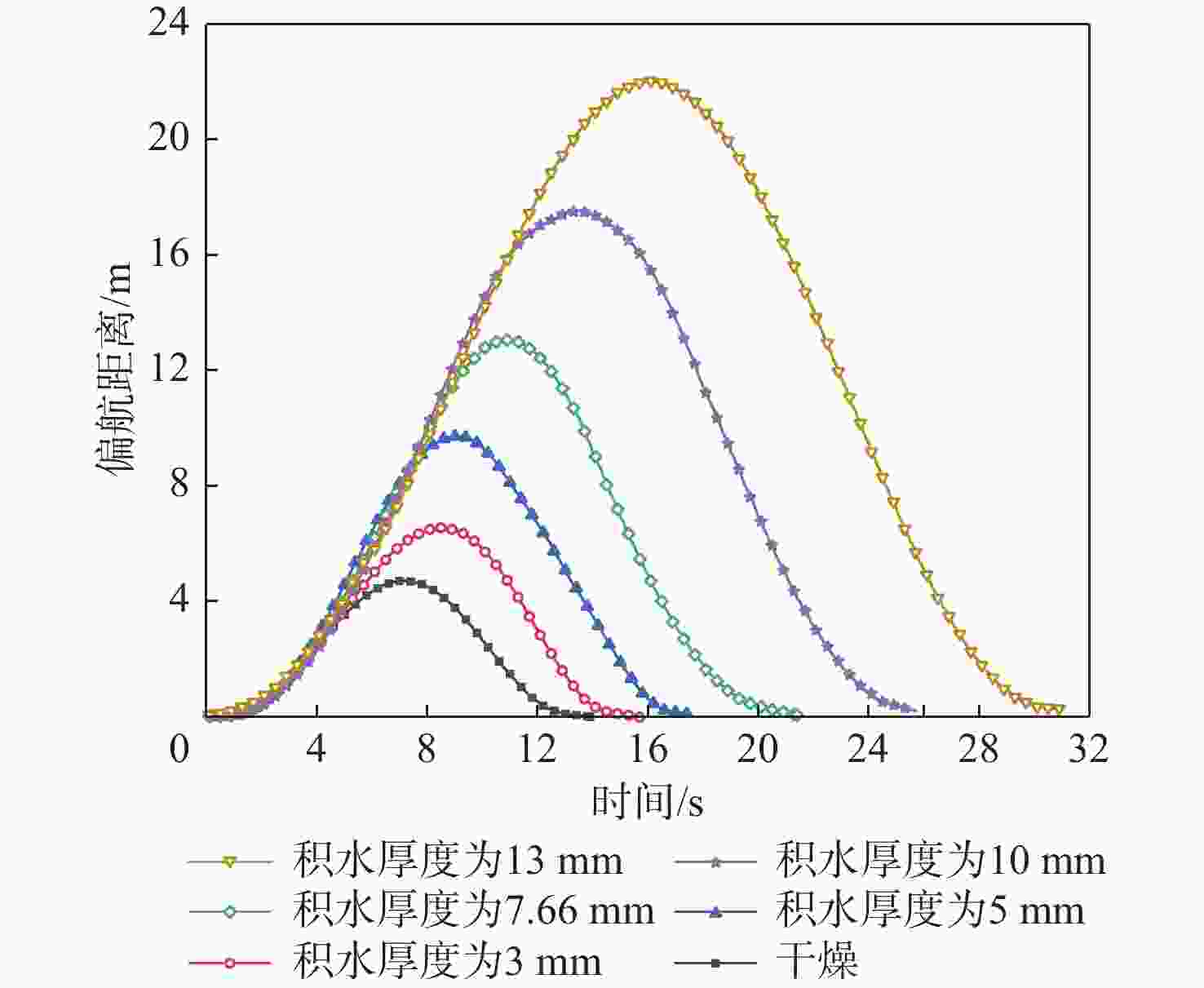
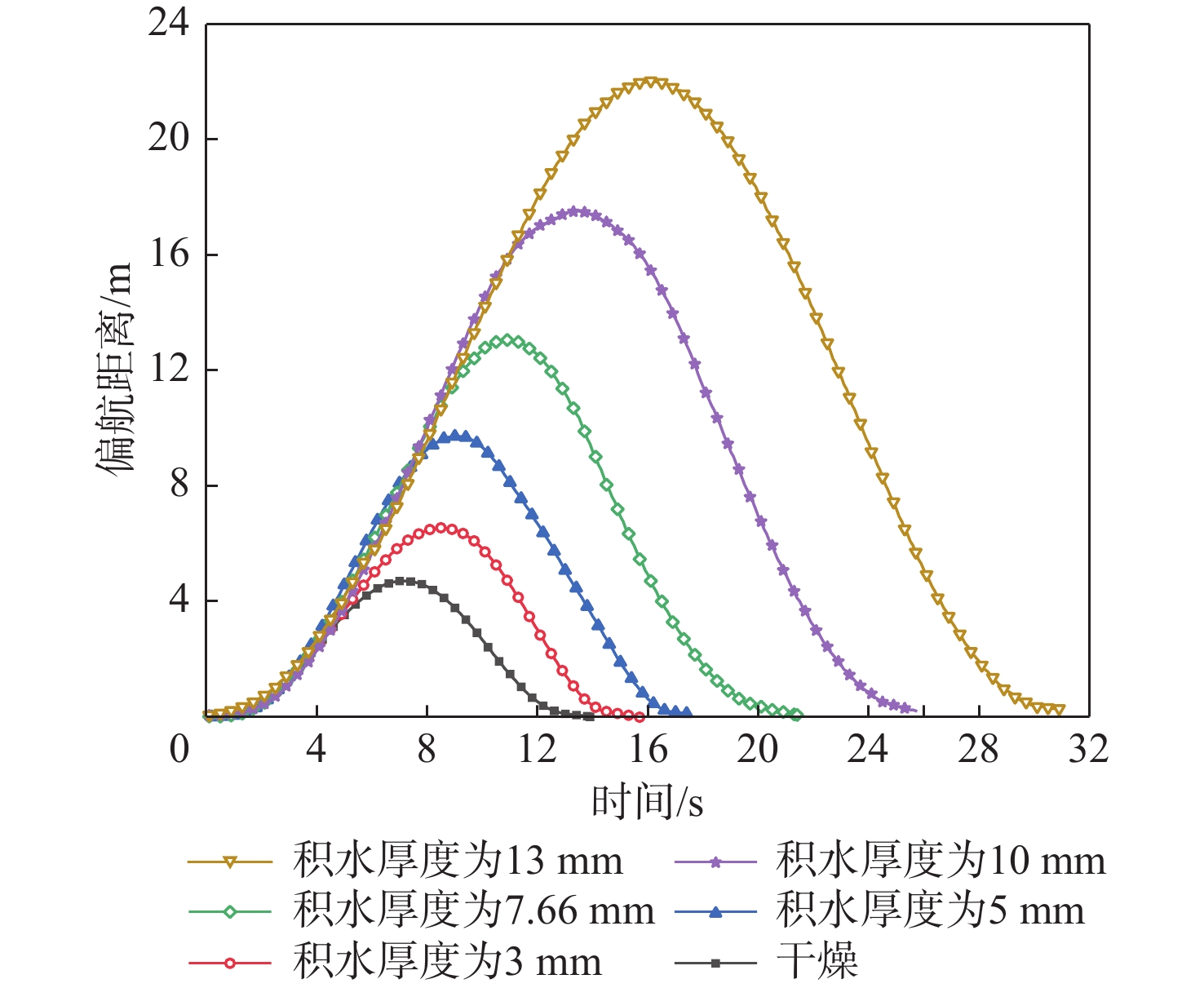
图 11 不同积水厚度的飞机偏航距离变化曲线
Figure 11. Yaw distance curves of aircraft under different water film thicknesses
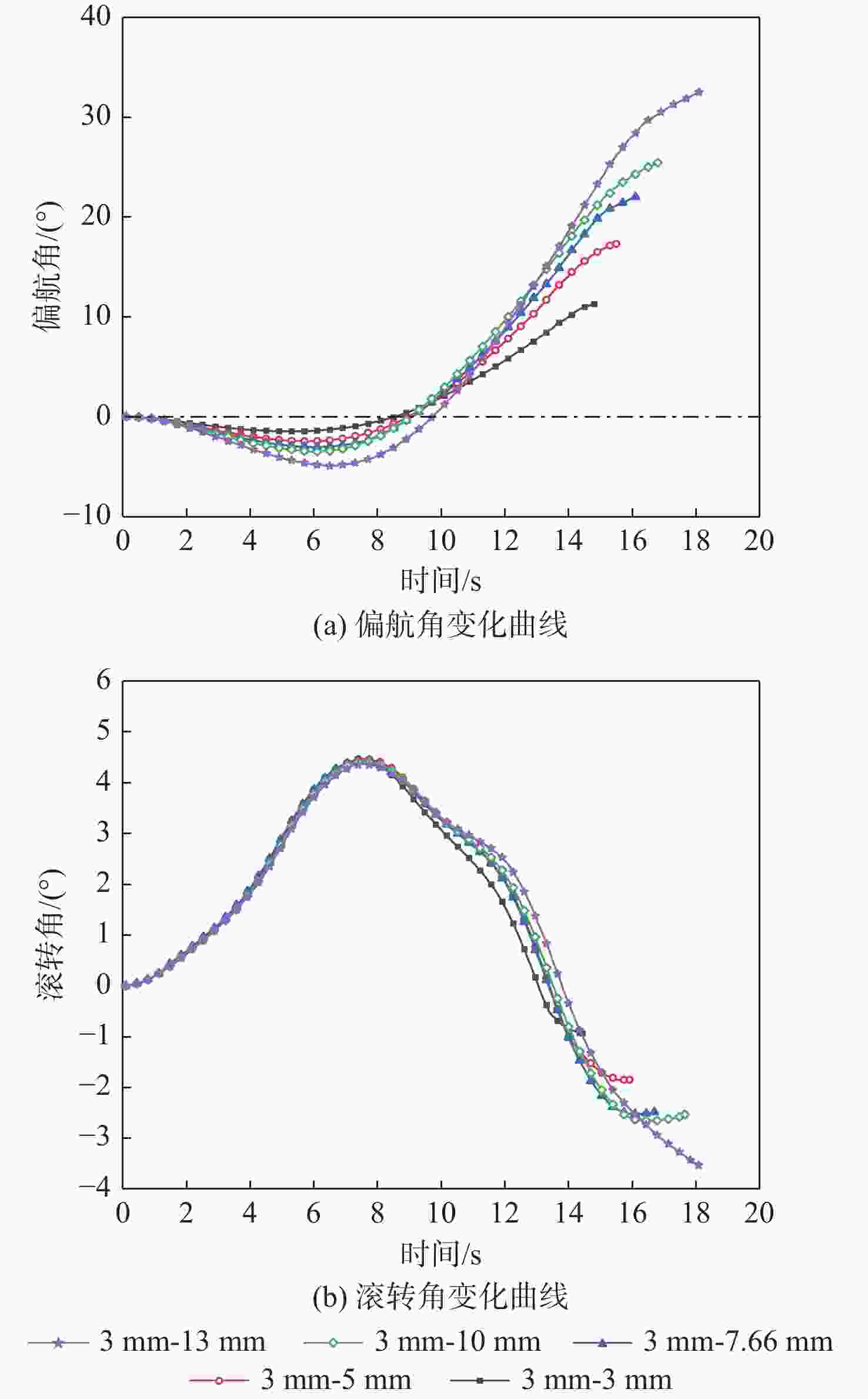
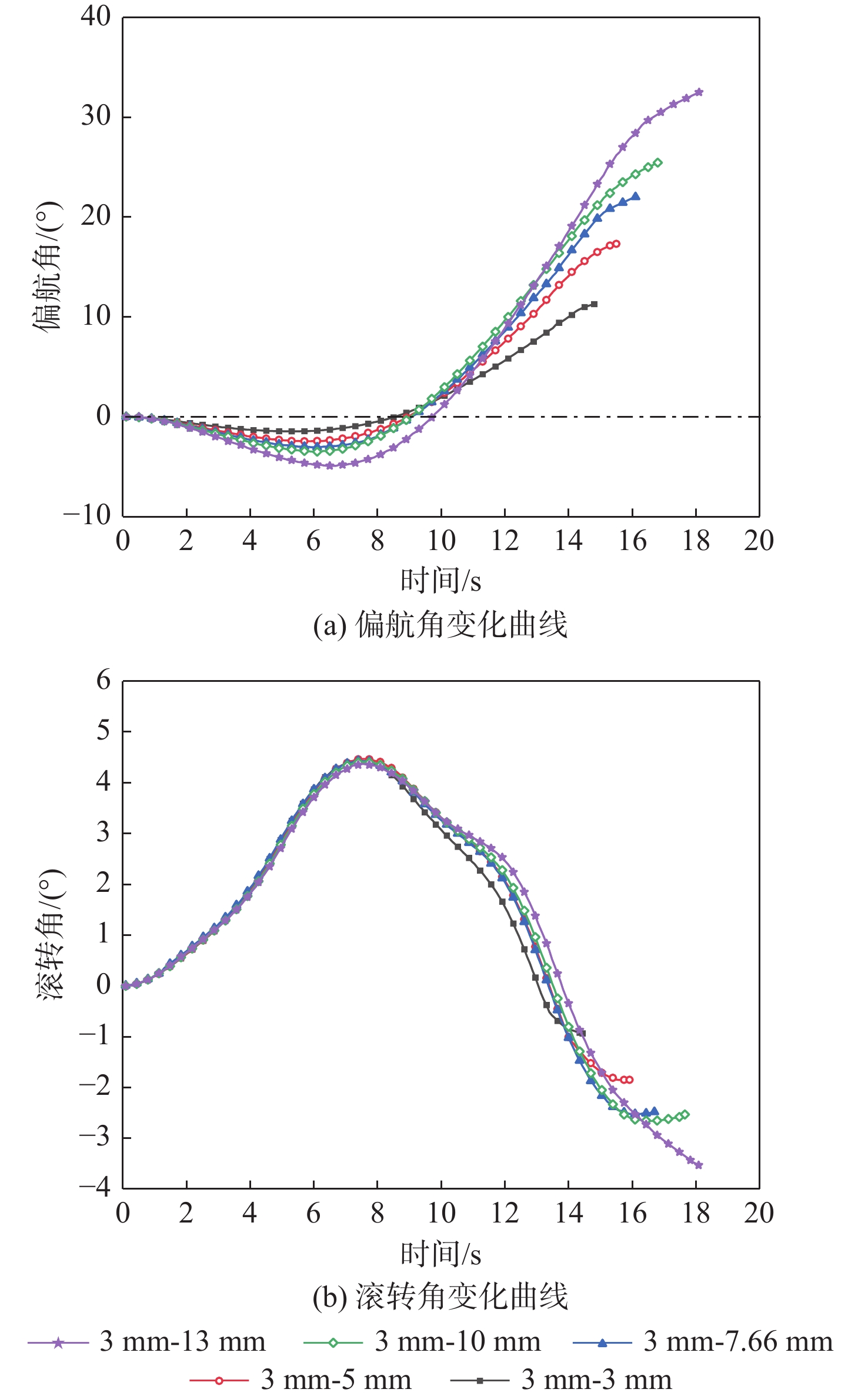
图 12 摩阻不平衡度对飞机着陆滑跑姿态角的影响
Figure 12. Effect of friction imbalance level on landing and taxiing attitude angles of aircraft
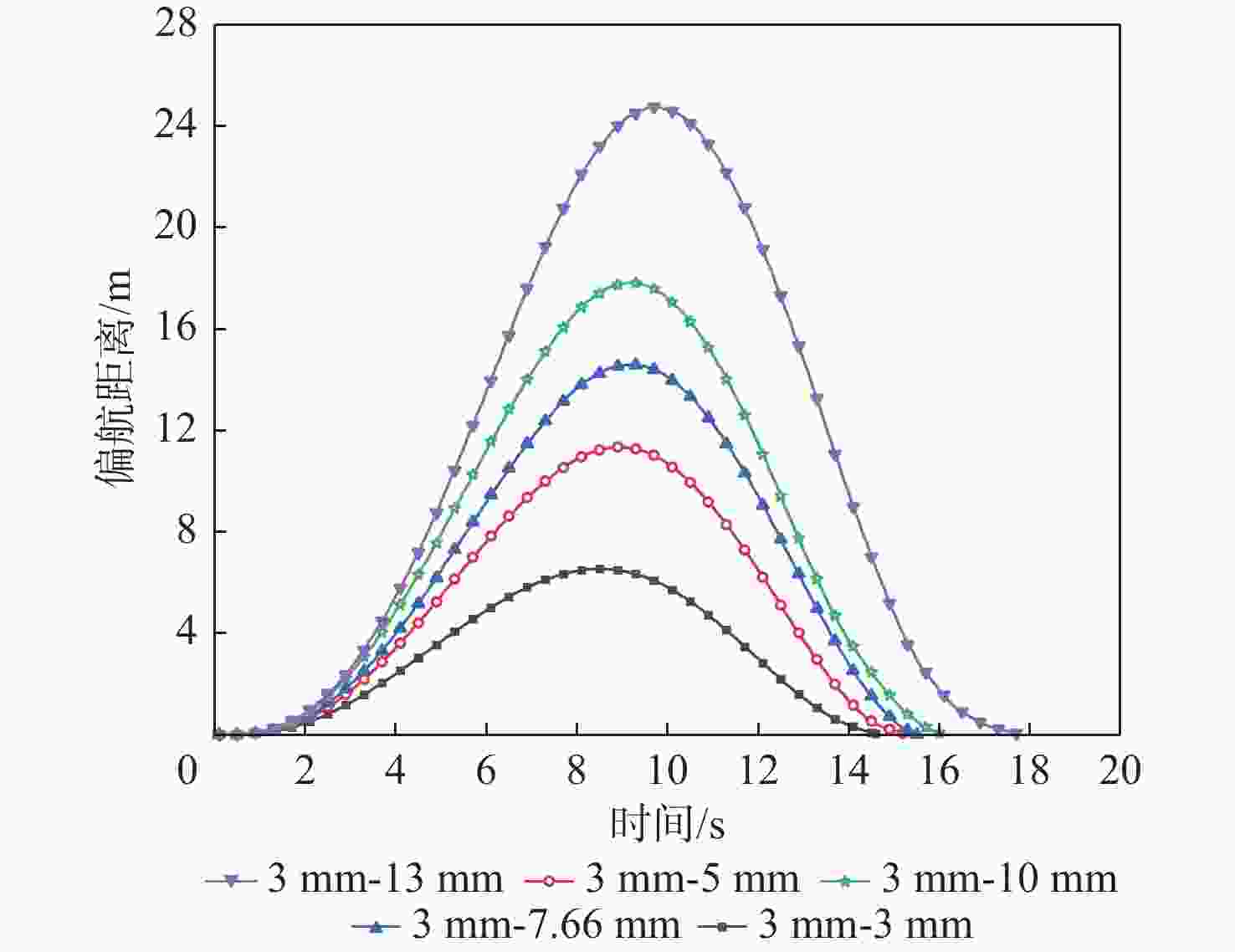
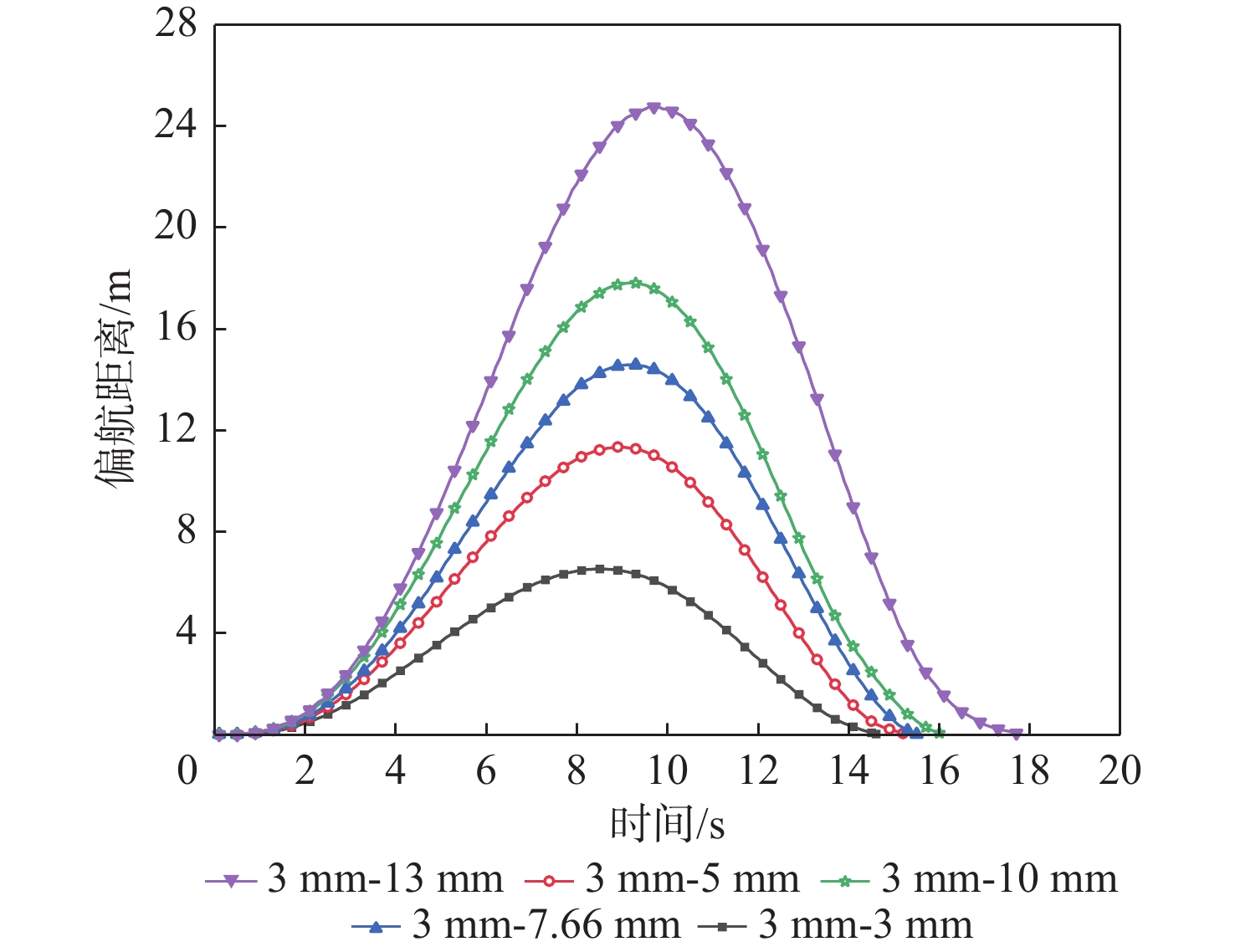
图 13 不同摩阻不平衡度的飞机偏航距离变化曲线
Figure 13. Yaw distance curves of aircraft under different friction imbalance levels
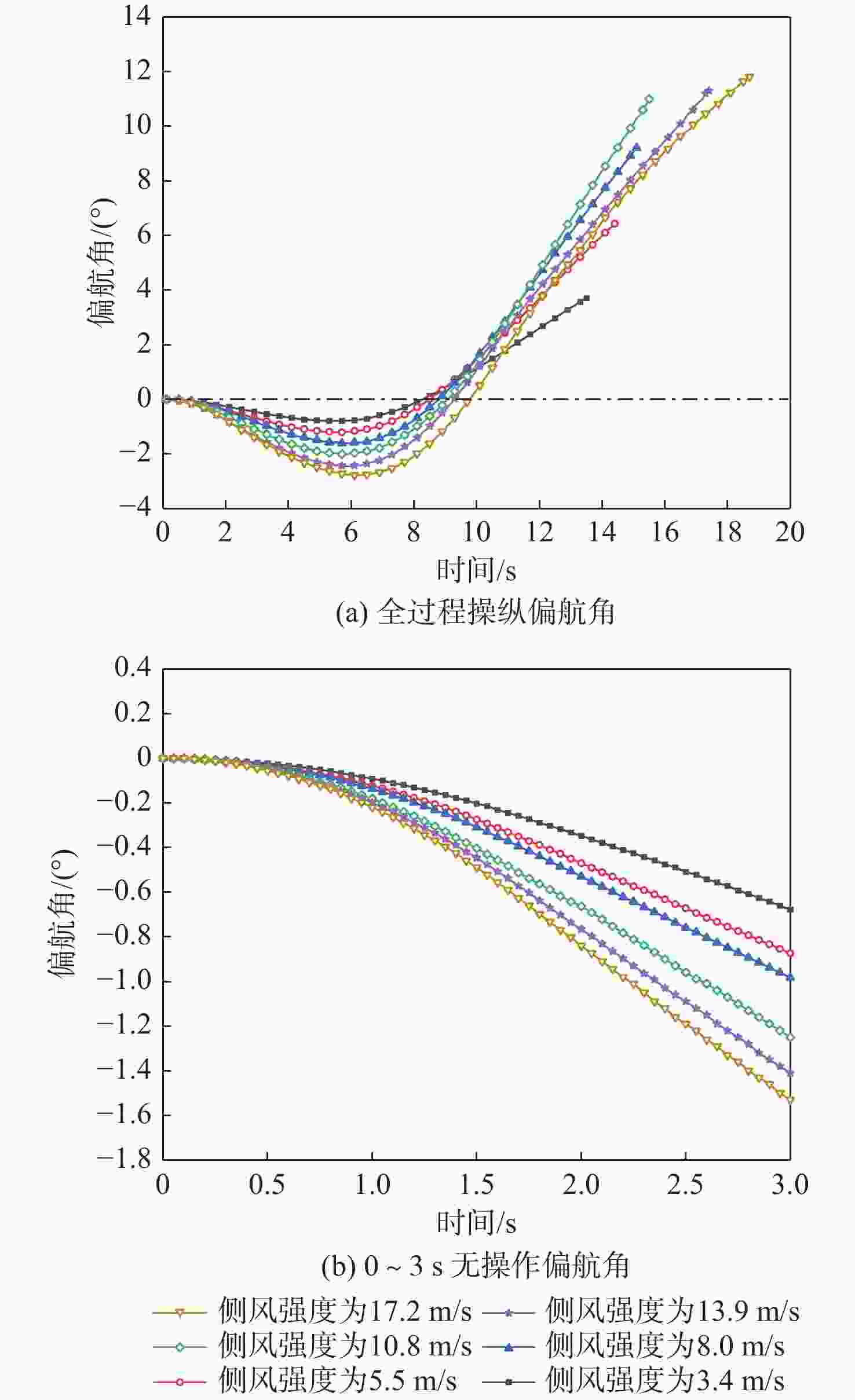
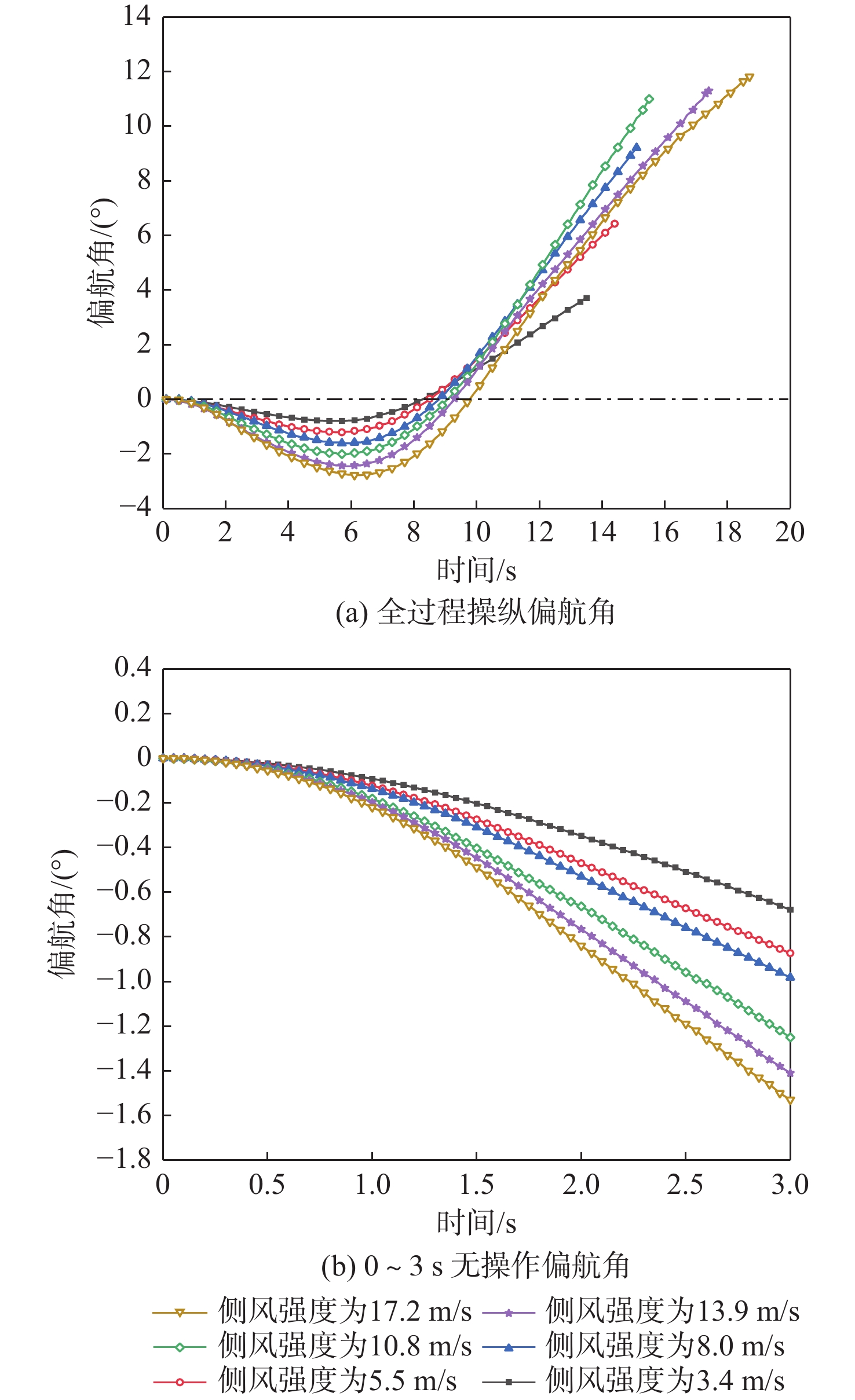
图 14 侧风强度对飞机着陆滑跑偏航角的影响
Figure 14. Effect of crosswind intensity on yaw angle of aircraft during landing roll
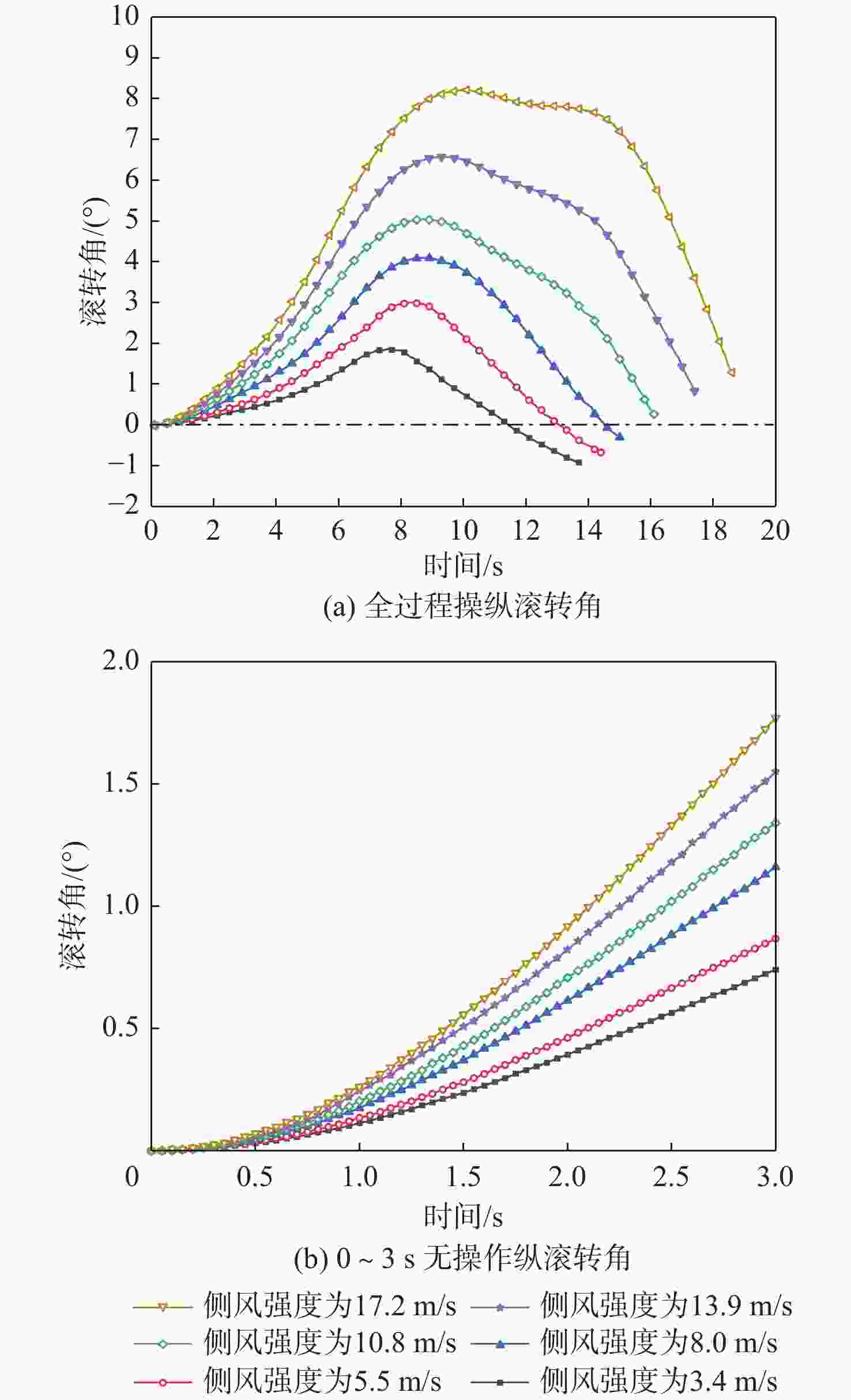
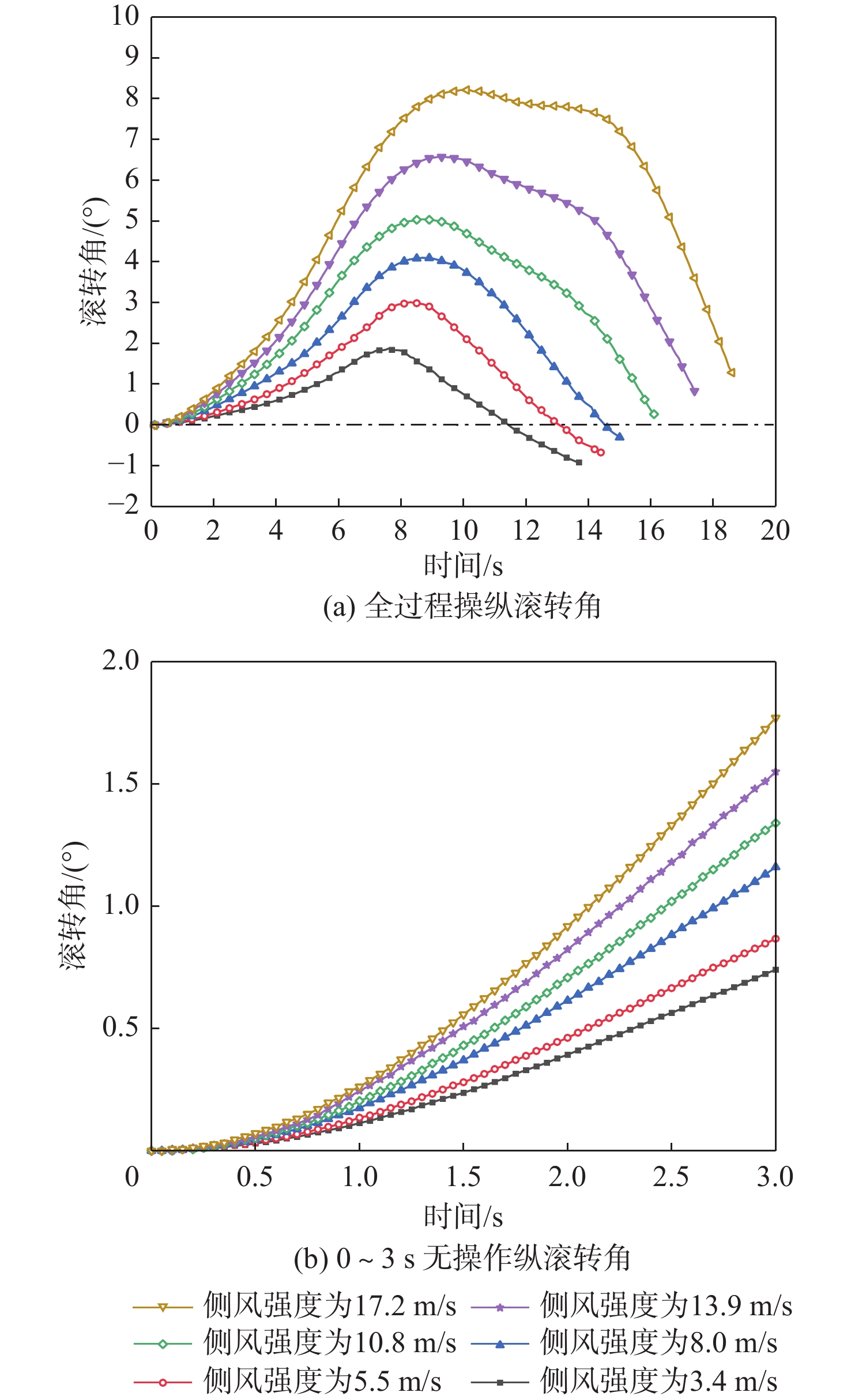
图 15 侧风强度对飞机着陆滑跑滚转角的影响
Figure 15. Effect of crosswind intensity on roll angle of aircraft during landing roll
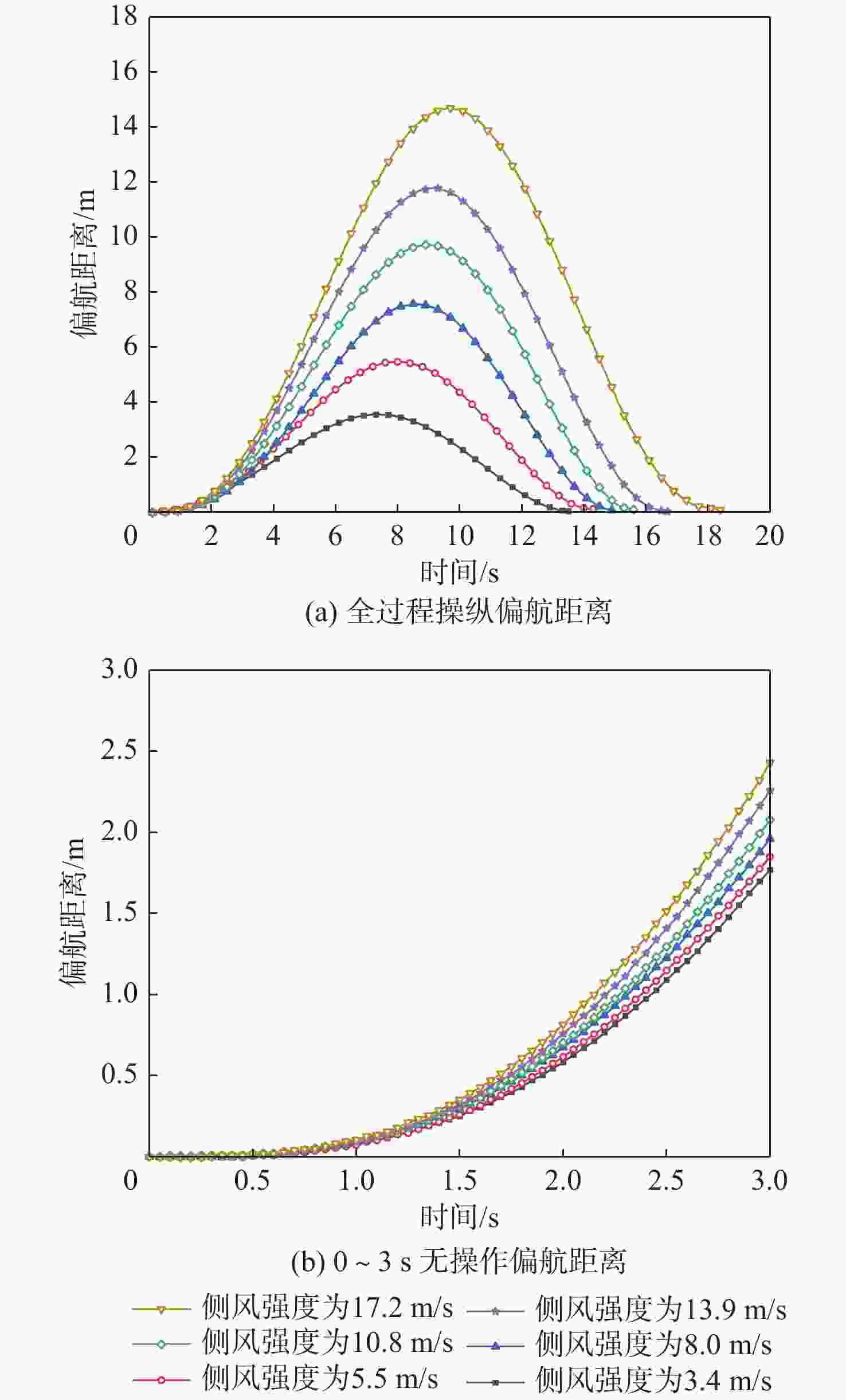
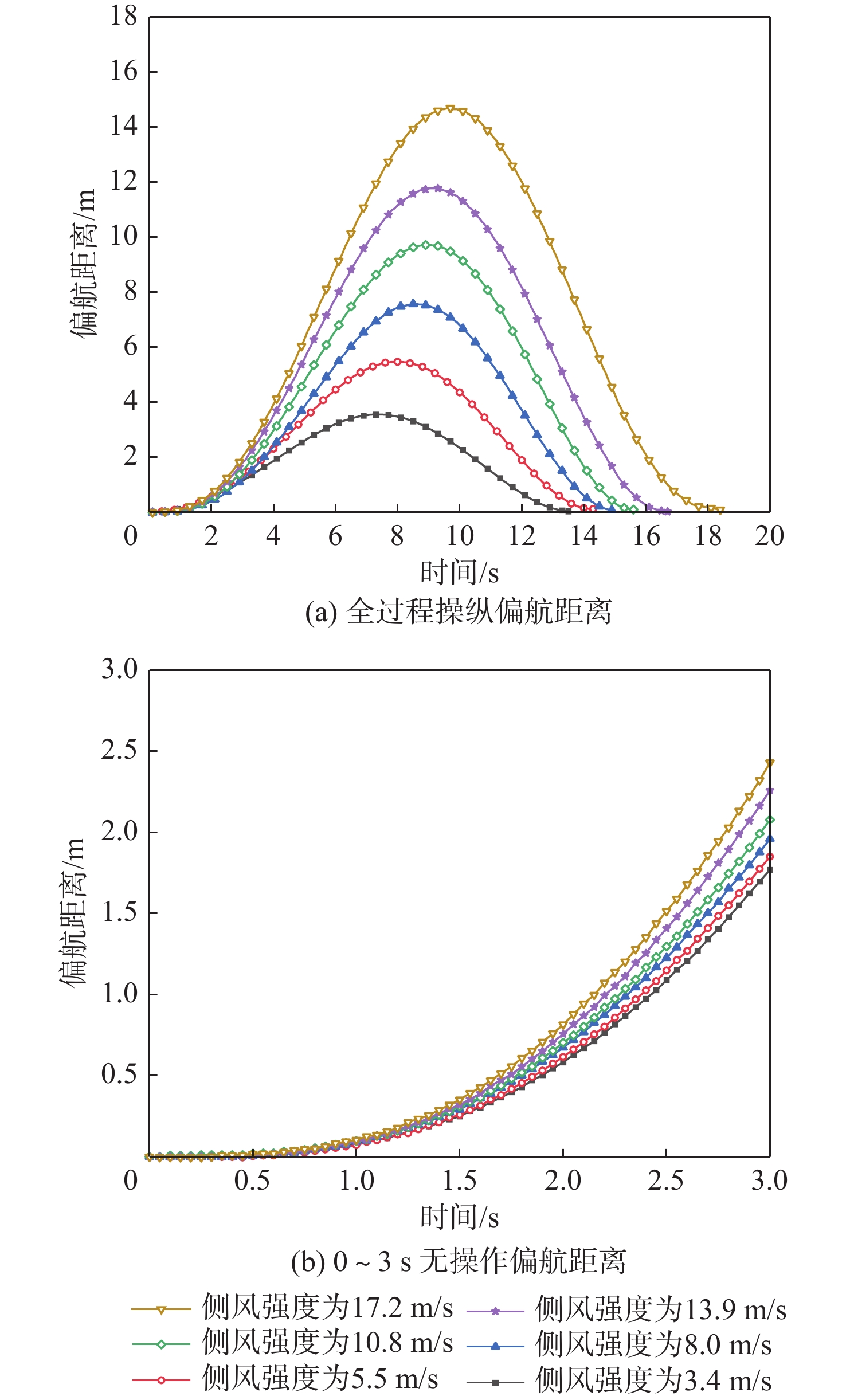
图 16 不同侧风强度的飞机偏航距离变化曲线
Figure 16. Yaw distance curves of aircraft under different crosswind intensities
表 1 纵向摩擦系数参数
Table 1. Longitudinal friction coefficient parameters
积水厚度/mm i 0(干燥) −0.3×10−3 3 −0.9×10−3 5 −2.1×10−3 7.66 −2.9×10−3 10 −3.1×10−3 13 −4.1×10−3  下载: 导出CSV
下载: 导出CSV
表 2 侧向摩擦系数参数
Table 2. Lateral friction coefficient parameters
积水厚度/mm $ {k_1} $ $ {k_2} $ 3 1.7286 ×10−4− 1.8571 ×10−65 3.4786 ×10−4−4.500×10−6 7.66 4.6429 ×10−4− 6.4286 ×10−610 4.0357 ×10−4− 6.6429 ×10−613 6.4857 ×10−4− 9.4286 ×10−6
下载: 导出CSV
表 3 PID控制参数
Table 3. PID control parameters
通道 Kp KI KD 滚转 1.39 1.27 0.48 俯仰 7.64 9.38 1.86 偏航 −4.28 −6.44 2.15
下载: 导出CSV
表 4 驾驶员模型参数
Table 4. Pilot model parameters
通道 KM TL/s TI/s TN/s $ \tau $/s 滚转 8 0.05 0.05 0.55 0.12 俯仰 6 0.5 0.2 0.01 0.08 偏航 2.63 0.05 0.05 0.08 0.12
下载: 导出CSV
表 5 不同积水厚度下滑跑参数
Table 5. Landing roll parameters under different water film thicknesses
积水厚度/mm 滑跑时间/s 偏航距离/m 0(干燥) 15.2 4.69 3 16.3 6.53 5 18.4 9.71 7.66 22.7 13.05 10 25.9 17.50 13 31.1 22.73
下载: 导出CSV
表 6 不同摩阻不平衡度的滑跑参数
Table 6. Landing roll parameters under different friction imbalance levels
摩阻不平衡度 滑跑时间/s 偏航距离/m 3 mm-3 mm 16.3 6.53 3 mm-5 mm 16.4 11.34 3 mm-7.66 mm 16.6 14.58 3 mm-10 mm 17.1 17.81 3 mm-13 mm 18.1 24.75
下载: 导出CSV
表 7 有/无驾驶员操纵状况下3 s时偏航角差值
Table 7. Yaw angle difference at 3 s with and without pilot control
侧风强度/(m·s−1) 偏航角差值/(°) 3.4 0.20 5.5 0.17 8.0 0.14 10.8 0.12 13.9 0.10 17.2 0.07
下载: 导出CSV
表 8 有/无驾驶员操纵状况下3 s时滚转角差值
Table 8. Roll angle difference at 3 s with and without pilot control
侧风强度/(m·s−1) 滚转角差值/(°) 3.4 0.35 5.5 0.33 8.0 0.31 10.8 0.23 13.9 0.18 17.2 0.16
下载: 导出CSV
表 9 不同侧风强度下偏航距离峰值
Table 9. Peak yaw distance under different crosswind intensities
侧风强度/(m·s−1) 偏航距离峰值/m 偏航距离增量 3.4 3.55 5.5 5.47 1.92 8.0 7.57 2.10 10.8 9.71 2.14 13.9 11.77 2.06 17.2 14.69 2.92
下载: 导出CSV
表 10 有/无驾驶员操纵状况下3 s时偏航距离差值
Table 10. Yaw distance difference at 3 s with and without pilot control
侧风强度/(m·s−1) 偏航距离差值/m 3.4 0.63 5.5 0.62 8.0 0.60 10.8 0.57 13.9 0.47 17.2 0.42
下载: 导出CSV
表 11 极差分析结果
Table 11. Range analysis results
着陆滑跑效果 影响因素 N1 N2 N3 N4 N5 n1 n2 n3 n4 n5 极差RR 偏航距离 积水厚度 65.05 24.01 93.87 130.40 131.90 13.01 4.803 18.77 26.08 26.39 21.58 摩阻不平衡度 48.05 76.62 104.40 115.20 101.00 9.61 15.32 20.88 23.05 20.19 13.44 侧风强度 104.90 48.43 95.43 74.26 122.30 20.98 9.69 19.09 14.85 24.45 14.76 滚转角 积水厚度 18.19 16.15 17.44 17.46 19.18 3.64 3.23 3.49 3.49 3.84 0.61 摩阻不平衡度 15.39 19.03 20.03 17.1 16.87 3.08 3.81 4.01 3.42 3.38 0.93 侧风强度 11.57 11.79 13.60 22.32 29.15 2.31 2.36 2.72 4.46 5.83 3.52 偏航角 积水厚度 18.41 11.93 26.64 28.75 55.04 3.68 2.39 5.33 5.75 11.01 8.62 摩阻不平衡度 16.14 15.96 30.36 40.37 37.93 3.229 3.19 6.07 8.07 7.59 4.88 侧风强度 28.71 15.62 29.46 31.09 35.88 5.74 3.12 5.893 6.22 7.18 4.05
下载: 导出CSV
-
[1] IATA. IATA safety report 2019[R]. Montreal: IATA, 2019: 46-85. [2] 顾宏斌. 飞机地面运行的动力学模型[J]. 航空学报, 2001, 22(2): 163-167.GU H B. Dynamic model of aircraft ground handling[J]. Acta Aeronautica et Astronautica Sinica, 2001, 22(2): 163-167(in Chinese). [3] 袁东. 飞机起落架仿真数学模型建立方法[J]. 飞行力学, 2002, 20(4): 44-47. doi: 10.3969/j.issn.1002-0853.2002.04.011YUAN D. Establishment method of a landing-gear simulation model[J]. Flight Dynamics, 2002, 20(4): 44-47(in Chinese). doi: 10.3969/j.issn.1002-0853.2002.04.011 [4] 李波, 焦宗夏. 飞机起落架系统动力学建模与仿真[J]. 北京航空航天大学学报, 2007, 33(1): 46-49. doi: 10.3969/j.issn.1001-5965.2007.01.011LI B, JIAO Z X. Aircraft landing gear system dynamic modeling and simulation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(1): 46-49(in Chinese). doi: 10.3969/j.issn.1001-5965.2007.01.011 [5] 苏彬, 王大海, 陈又军. 起落架数学模型及其在风场中的应用[J]. 飞行力学, 2007, 25(1): 63-66.SU B, WANG D H, CHEN Y J. Landing-gear mathematical model and its application in wind-field[J]. Flight Dynamics, 2007, 25(1): 63-66(in Chinese). [6] 刘海良, 王立新. 基于数字虚拟飞行的民机侧风着陆地面航向操稳特性评估[J]. 北京航空航天大学学报, 2018, 44(3): 516-525.LIU H L, WANG L X. Evaluation of directional ground stability and control characteristics in crosswind landing for civil airplane based on digital virtual flight[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3): 516-525(in Chinese). [7] 徐梓尧, 王琪. 含单边非完整约束飞机滑跑的建模与仿真方法[J]. 北京航空航天大学学报, 2015, 41(5): 835-840.XU Z Y, WANG Q. Method for modeling and simulation of aircraft taxiing with unilateral and non-holonomic constraints[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(5): 835-840(in Chinese). [8] 廖丽涓, 贾玉红. 基于虚拟样机的飞机起落架着陆时的响应分析[J]. 北京航空航天大学学报, 2008, 34(1): 75-78.LIAO L J, JIA Y H. Virtual prototype-based response analysis of aircraft landing gear[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(1): 75-78(in Chinese). [9] 马大卫, 聂宏, 张明. 民用飞机侧风影响下的纠偏研究[J]. 飞行力学, 2013, 31(1): 5-9.MA D W, NIE H, ZHANG M. The corrective research of the civil aircraft under the influence of the crosswind[J]. Flight Dynamics, 2013, 31(1): 5-9(in Chinese). [10] 陆军, 吴国强, 吴叶斌, 等. 飞机降落过程自适应控制仿真研究[J]. 计算机仿真, 2011, 28(4): 53-57.LU J, WU G Q, WU Y B, et al. Simulation based on optimized CMAC-PID control in process of aircraft landing[J]. Computer Simulation, 2011, 28(4): 53-57(in Chinese). [11] 张恒. 轮胎与湿滑道面相互作用下的飞机滑水行为研究[D]. 天津: 中国民航大学, 2018: 48-77.ZHANG H. Study on aircraft water skiing behavior under the interaction between tire and wet road surface[D]. Tianjin: Civil Aviation University of China, 2018: 48-77(in Chinese). [12] 李少杰. 考虑不平衡摩阻的湿滑污染道面飞机着陆安全问题研究[D]. 天津: 中国民航大学, 2020: 54-61.LI S J. Study on landing safety of aircraft with wet and polluted road surface considering unbalanced friction[D]. Tianjin: Civil Aviation University of China, 2020: 54-61(in Chinese). [13] 刘芳兵. 湿滑跑道飞机侧风着陆滑行安全研究[D]. 天津: 中国民航大学, 2020: 49-54.LIU F B. Study on the safety of aircraft landing and taxiing in crosswind on wet runway[D]. Tianjin: Civil Aviation University of China, 2020: 49-54(in Chinese). [14] 王岩. 湿滑道面飞机偏出跑道姿态分析及防护措施研究[D]. 天津: 中国民航大学, 2022: 40-41.WANG Y. Attitude analysis and protective measures of aircraft deviating from runway on wet road surface[D]. Tianjin: Civil Aviation University of China, 2022: 40-41(in Chinese). [15] 张明. 飞机地面动力学若干关键技术研究[D]. 南京: 南京航空航天大学, 2009: 39-40.ZHANG M. Research on some key technologies of aircraft ground dynamics[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009: 39-40(in Chinese). [16] 刘艳. 飞机起落架系统动力学建模及分析[D]. 天津: 中国民航大学, 2020: 12-14.LIU Y. Dynamic modeling and analysis of aircraft landing gear system[D]. Tianjin: Civil Aviation University of China, 2020: 12-14(in Chinese). [17] 喻俊红, 郭孔辉, 谢兆夫. 三轴汽车二十六自由度模型的建模与仿真[J]. 计算机仿真, 2017, 34(11): 132-137.YU J H, GUO K H, XIE Z F. Modeling and simulation of 26-DOF model of 3-axle vehicle[J]. Computer Simulation, 2017, 34(11): 132-137(in Chinese). [18] 廖道争, 张明廉. 一种非线性鲁棒PID控制器设计方法[J]. 北京航空航天大学学报, 2005, 31(12): 1355-1357.LIAO D Z, ZHANG M L. Robust PID control for a class of nonlinear systems[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(12): 1355-1357(in Chinese). [19] 任秀欢, 何杰, 赵池航, 等. 基于驾驶员方向控制模型的汽车侧风稳定性虚拟试验研究[J]. 武汉理工大学学报(交通科学与工程版), 2010, 34(6): 1146-1149.REN X H, HE J, ZHAO C H, et al. Virtual test study on automobile cross-wind stability based on driver directional control model[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2010, 34(6): 1146-1149(in Chinese). [20] 黄碧璇. 线性参变PID控制及其在飞行控制中的应用研究[D]. 上海: 上海交通大学, 2021: 76-77.HUANG B X. Research on linear parametric PID control and its application in flight control[D]. Shanghai: Shanghai Jiao Tong University, 2021: 76-77(in Chinese). [21] 屈香菊. 驾驶员控制模型的建模研究[D]. 北京: 北京航空航天大学, 2003: 34-36.QU X J. Study on modeling human pilot control[D]. Beijing: Beihang University, 2003: 34-36(in Chinese). [22] 谭文倩, EFREMOV A V, 屈香菊. 一种预测驾驶员操纵行为的建模方法[J]. 北京航空航天大学学报, 2010, 36(10): 1140-1144.TAN W Q, EFREMOV A V, QU X J. Approach of pilot modeling for predicting pilot control behavior[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(10): 1140-1144(in Chinese). [23] 张奇, 袁广田, 巩鹏潇. 空中加油机人机闭环系统特性分析[J]. 飞行力学, 2019, 37(3): 26-31.ZHANG Q, YUAN G T, GONG P X. Analysis of the man-machine closed-loop system characteristics of aerial tanker[J]. Flight Dynamics, 2019, 37(3): 26-31(in Chinese). [24] 中国民用航空局. 中国民用航空规章 第25部: 运输类飞机适航标准: CCAR-25-R4[S]. 北京: 中国民用航空局, 1985: 49-50.Civil Aviation Administration of China. China civil aviation regulations. Part 25: airworthiness standards of transport category aircraft: CCAR-25-R4[S]. Beijing: Civil Aviation Administration of China, 1985: 49-50(in Chinese). [25] 钟凯琪, 肖旸, 芦星, 等. 煤火热能TPCT提取正交试验设计与极差分析[J]. 中国安全科学学报, 2021, 31(9): 135-141.ZHONG K Q, XIAO Y, LU X, et al. Orthogonal experiment design and range analysis of TPCT extracting thermal energy from coal fire[J]. China Safety Science Journal, 2021, 31(9): 135-141(in Chinese). [26] 钱小辉, 马骁妍, 秦中华, 等. 基于正交试验的玻璃壳热应力影响因素分析[J]. 机械工程学报, 2019, 55(12): 91-98. doi: 10.3901/JME.2019.12.091QIAN X H, MA X Y, QIN Z H, et al. Analysis of glass shell’s thermal stress based on orthogonal experiment[J]. Journal of Mechanical Engineering, 2019, 55(12): 91-98(in Chinese). doi: 10.3901/JME.2019.12.091 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 196
- HTML全文浏览量: 90
- PDF下载量: 8
- 被引次数: 0
