



Method for regional real-time satellite clock offset estimation considering group delay variation
-
摘要:
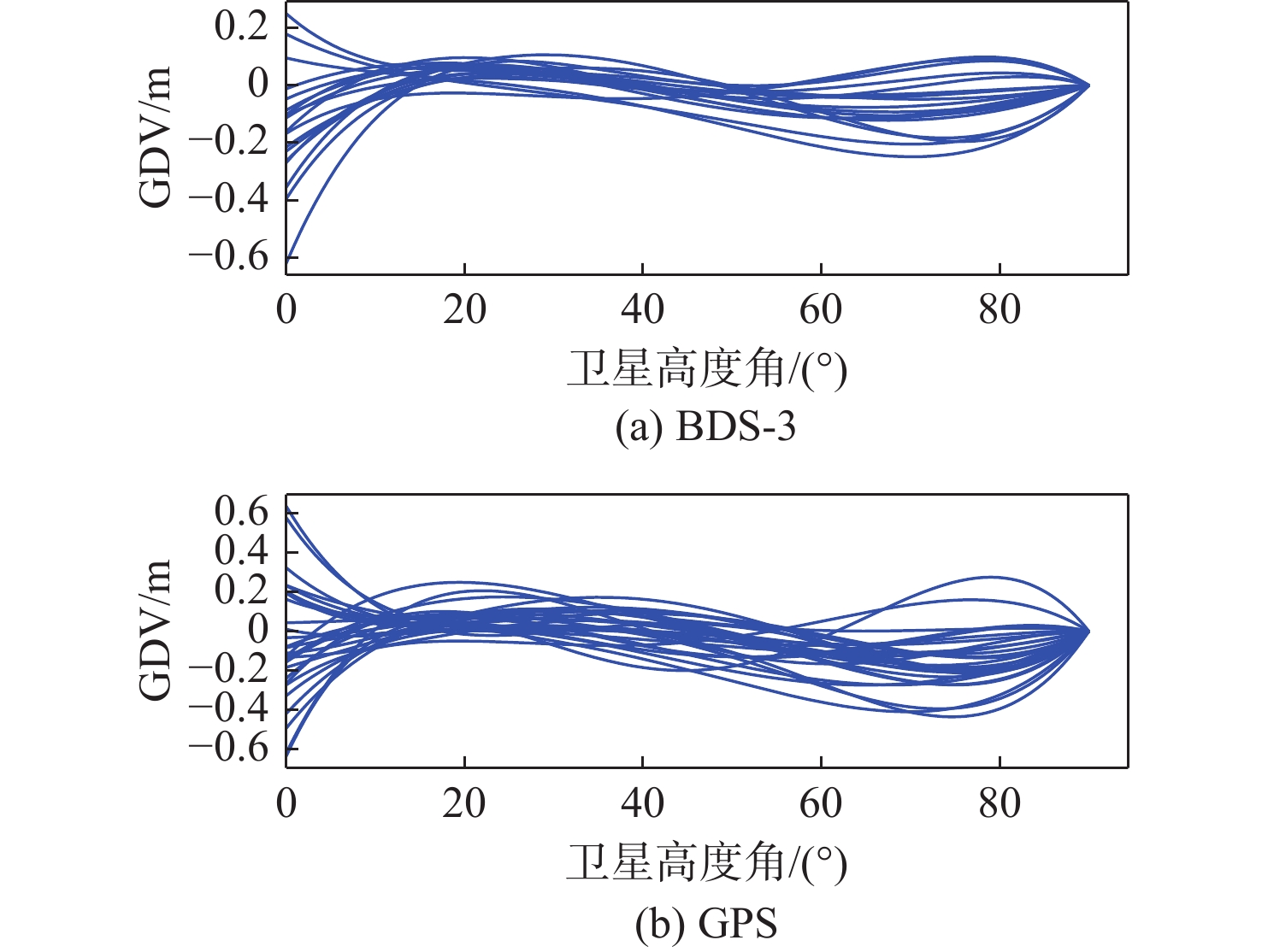
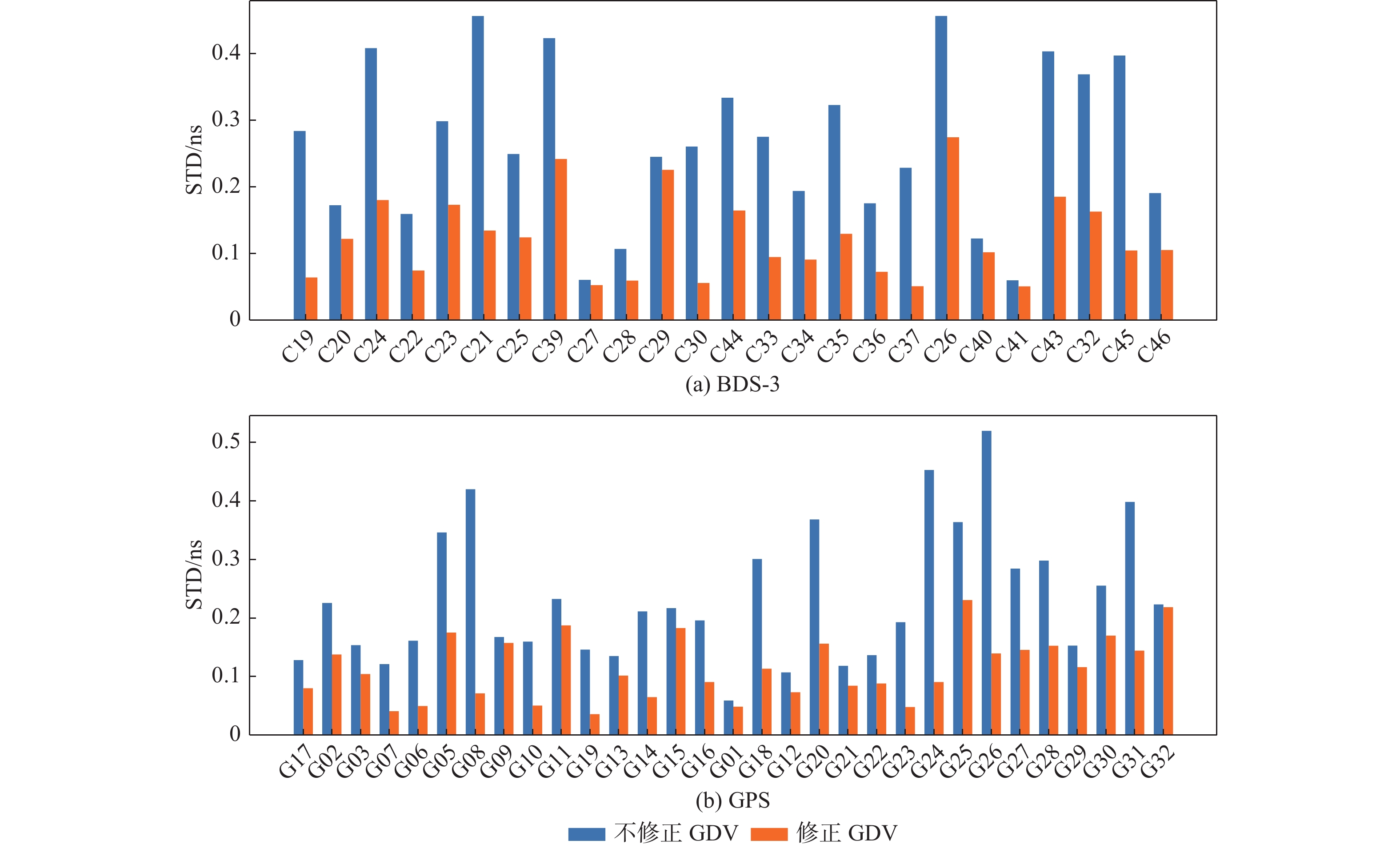
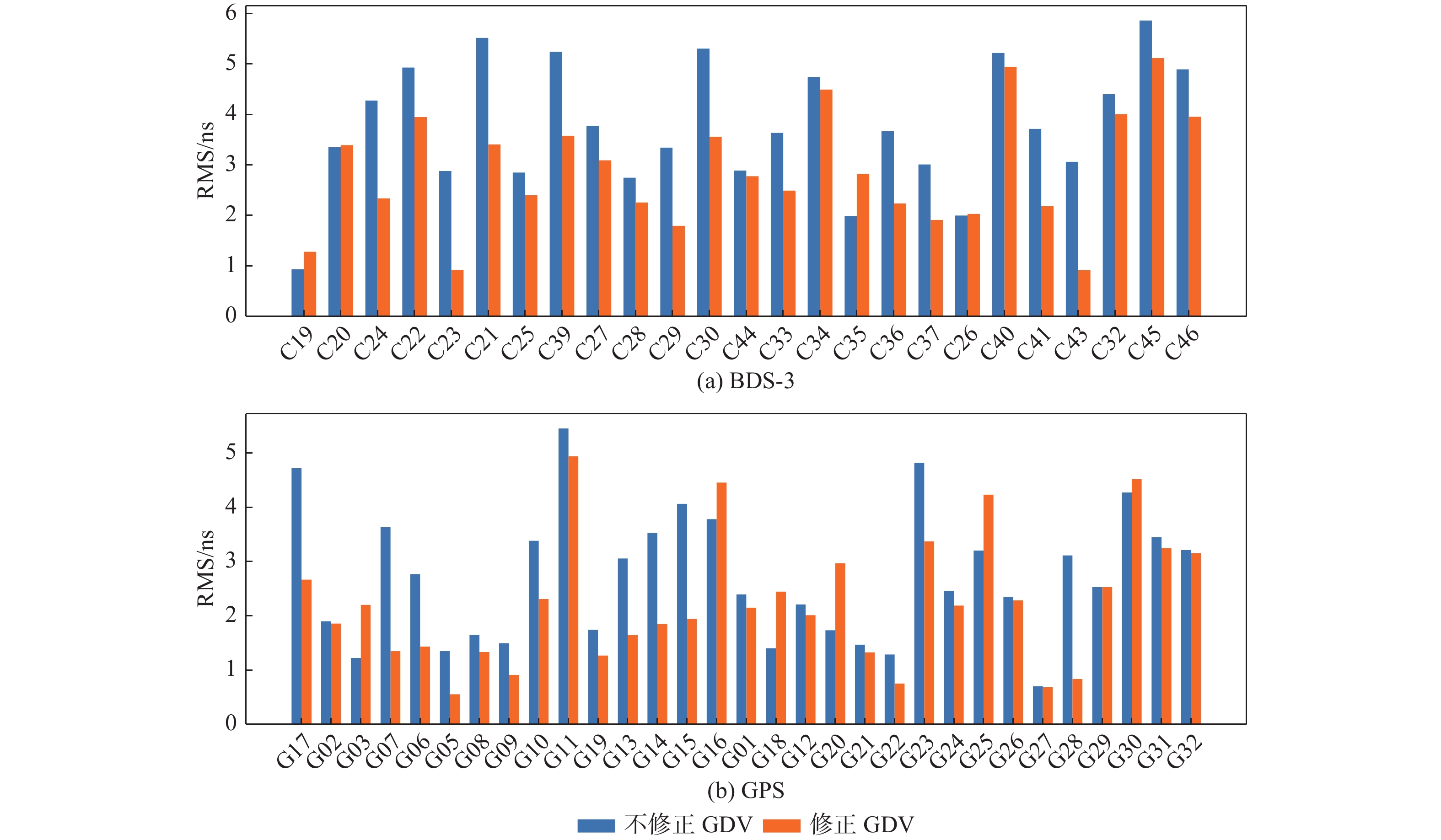
基于区域网的实时卫星钟差估计,是北斗PPP-B2b等区域精密单点定位 (PPP)服务的重要前提。然而,受测站分布限制,卫星频繁出入境,区域网实时钟差频繁重新收敛,钟差面临精度较低、常数偏差等问题。群延迟变化 (GDV) 是伪距中与卫星高度角等因素相关的慢变部分,GDV的存在会影响区域网钟差的收敛性,需要予以改正。因此,对15个区域站与北斗三号 (BDS-3) 全球定位系统 (GPS) 卫星之间的GDV进行提取与建模,并将建模后的GDV应用于区域网实时钟差估计中,以分析GDV对区域网钟差的影响。结果表明:考虑GDV改正后, BDS-3与GPS卫星钟差误差的均方根 (RMS) 分别减小了24%和18%,标准差 (STD) 分别提升了56%和52%;区域网钟差被用于动态PPP,使用顾及GDV改正的区域网卫星钟差后,BDS-3单系统动态PPP的水平方向和高程方向的定位精度分别提升了37%和19%,GPS单系统动态PPP的水平方向和高程方向的定位精度分别提升了49%和27%,GPS/BDS-3双系统动态PPP的水平方向和高程方向定位精度分别提升了61%和32%。
Abstract:Real-time satellite clock estimation based on regional networks is a prerequisite for regional precise point positioning (PPP) services such as the BDS-3 PPP-B2b service. However, issues like low precision and persistent bias plague regional real-time satellite clock estimate, which is constrained by the dispersion of ground stations. Group delay variation (GDV), which varies with satellite elevation angle, is the low-frequency part of the code multipath. The existence of GDV will affect the convergence of the regional network clock estimation and needs to be corrected. Therefore, this contribution extracts and models GDV between 15 regional stations and BDS-3/ global positioning system(GPS) satellites, and applies the GDV model to real-time clock estimation based on regional observation, and analyzes its impact. The results show that, after considering the GDV correction, the root mean square (RMS) of BDS-3 and GPS satellite clock offsets are reduced by 24% and 18%, respectively; the standard deviation (STD) is increased by 56% and 52% for BDS-3 and GPS, respectively. Finally, the clock offset is used in kinematic PPP. The BDS-3-only positioning accuracy is improved by 37% and 19% in the horizontal and vertical directions, respectively, by using the clock offset that accounts for the GDV correction. A similar conclusion can also be found in the GPS-only case, whose positioning accuracy is increased by 49% and 27% in the horizontal and vertical direction, respectively, and in the GPS/BDS-3 case, whose accuracy is increased by 61% and 32%.
-
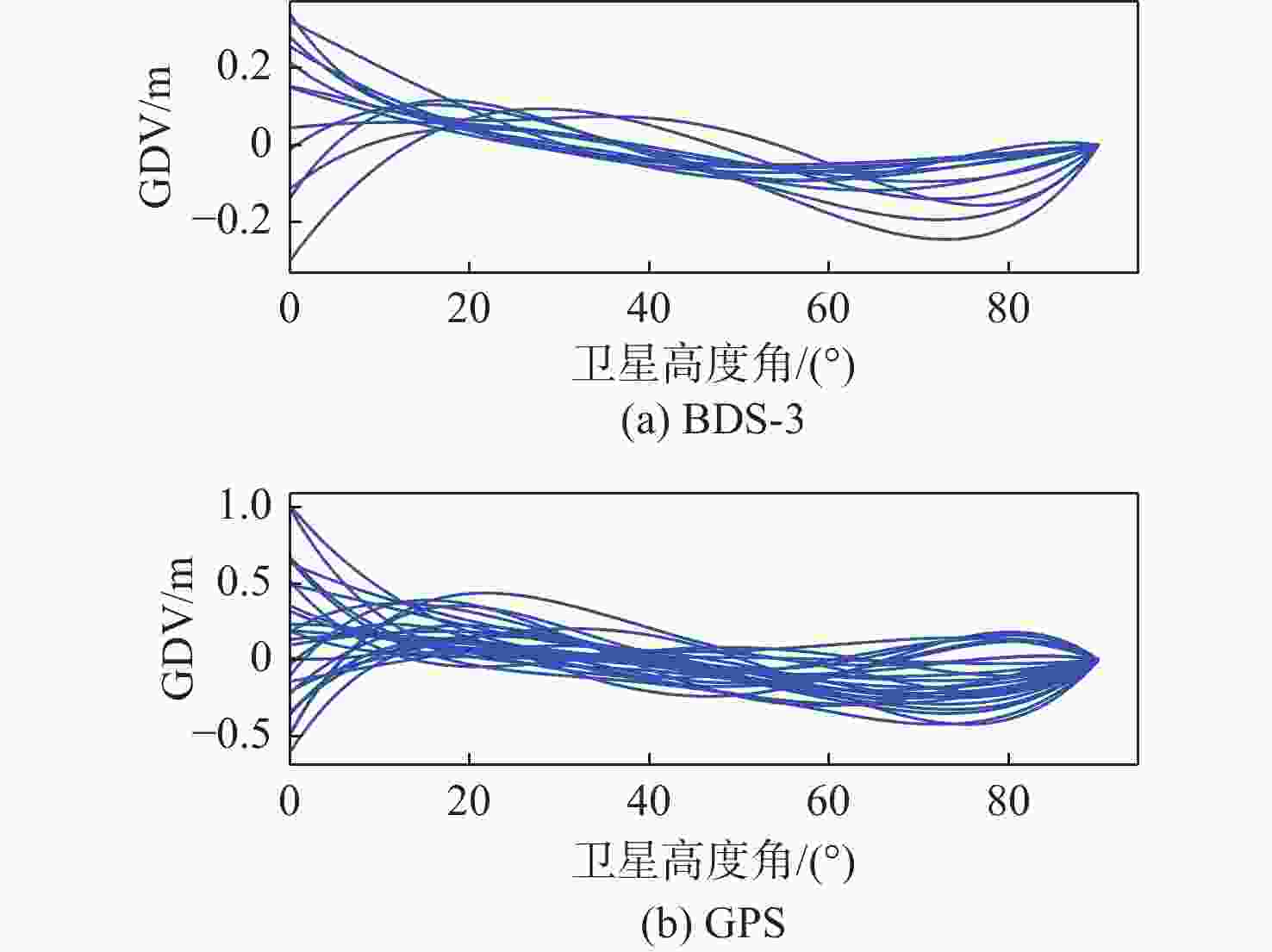
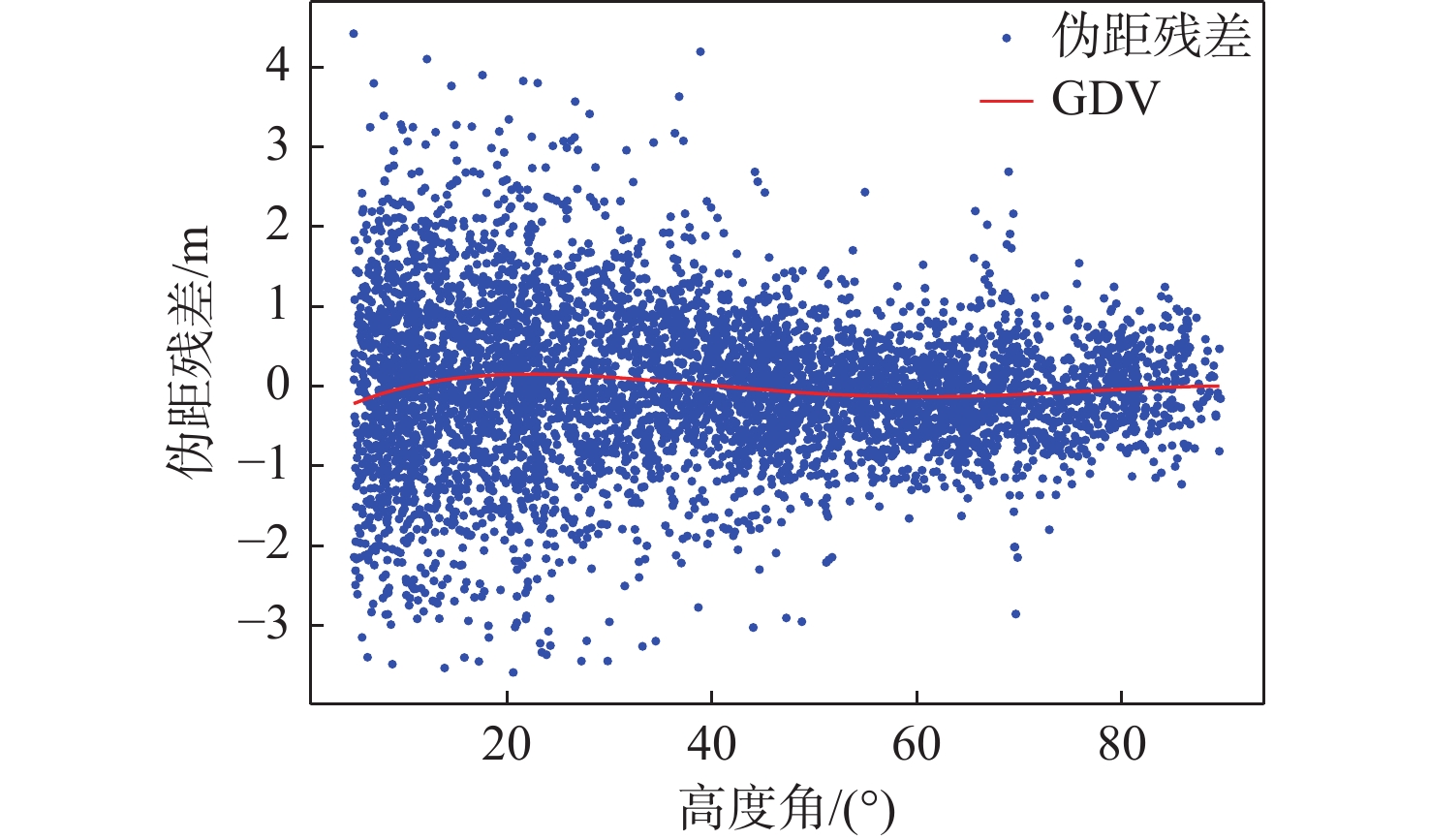
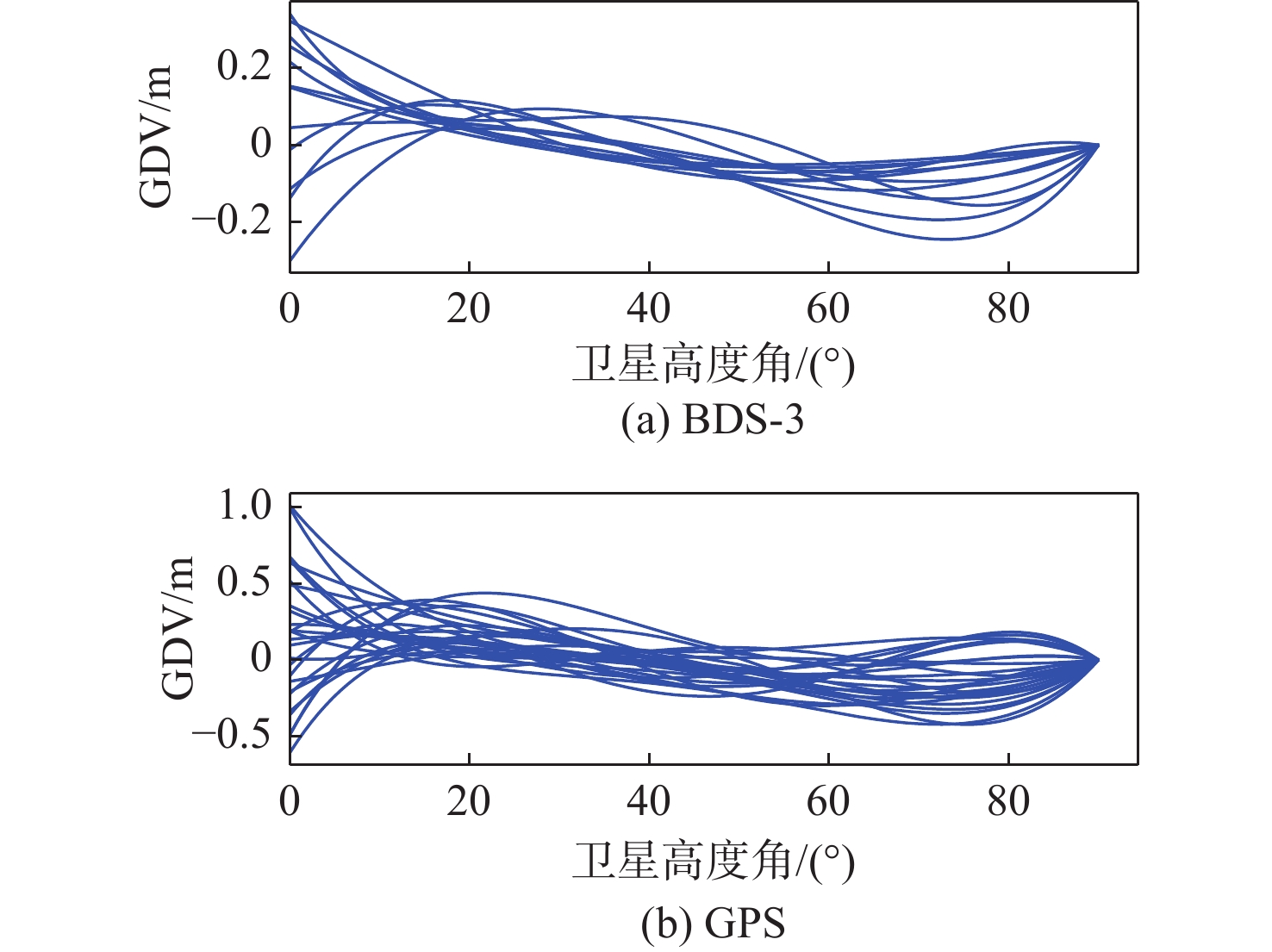
图 3 TLSE站与BDS-3/GPS卫星间的GDV拟合结果
Figure 3. GDV fitting results between TLSE and BDS-3/GPS satellites
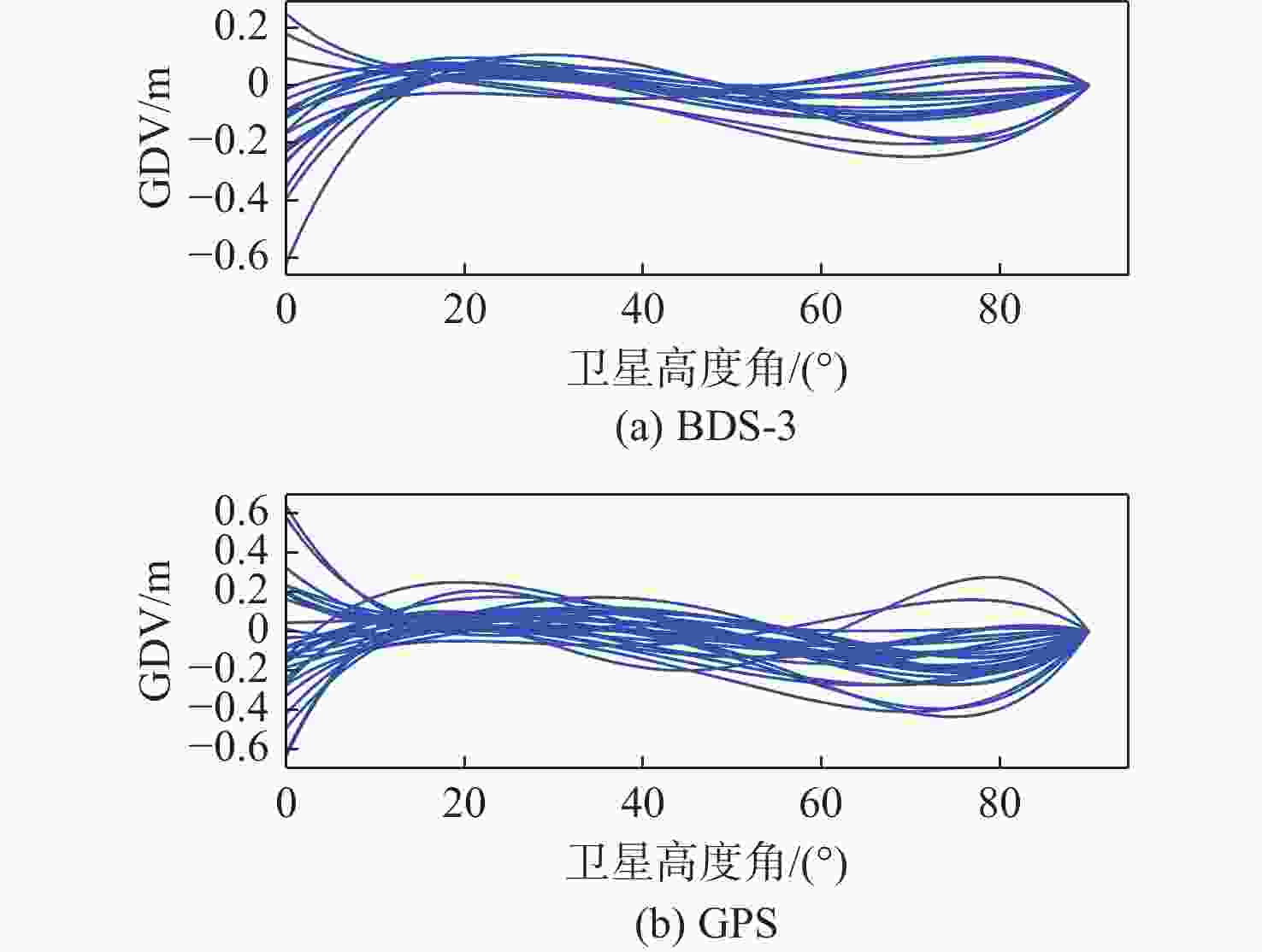
图 4 WSRT站与BDS-3/GPS卫星间的GDV拟合结果
Figure 4. GDV fitting results between WSRT and BDS-3 /GPS satellites
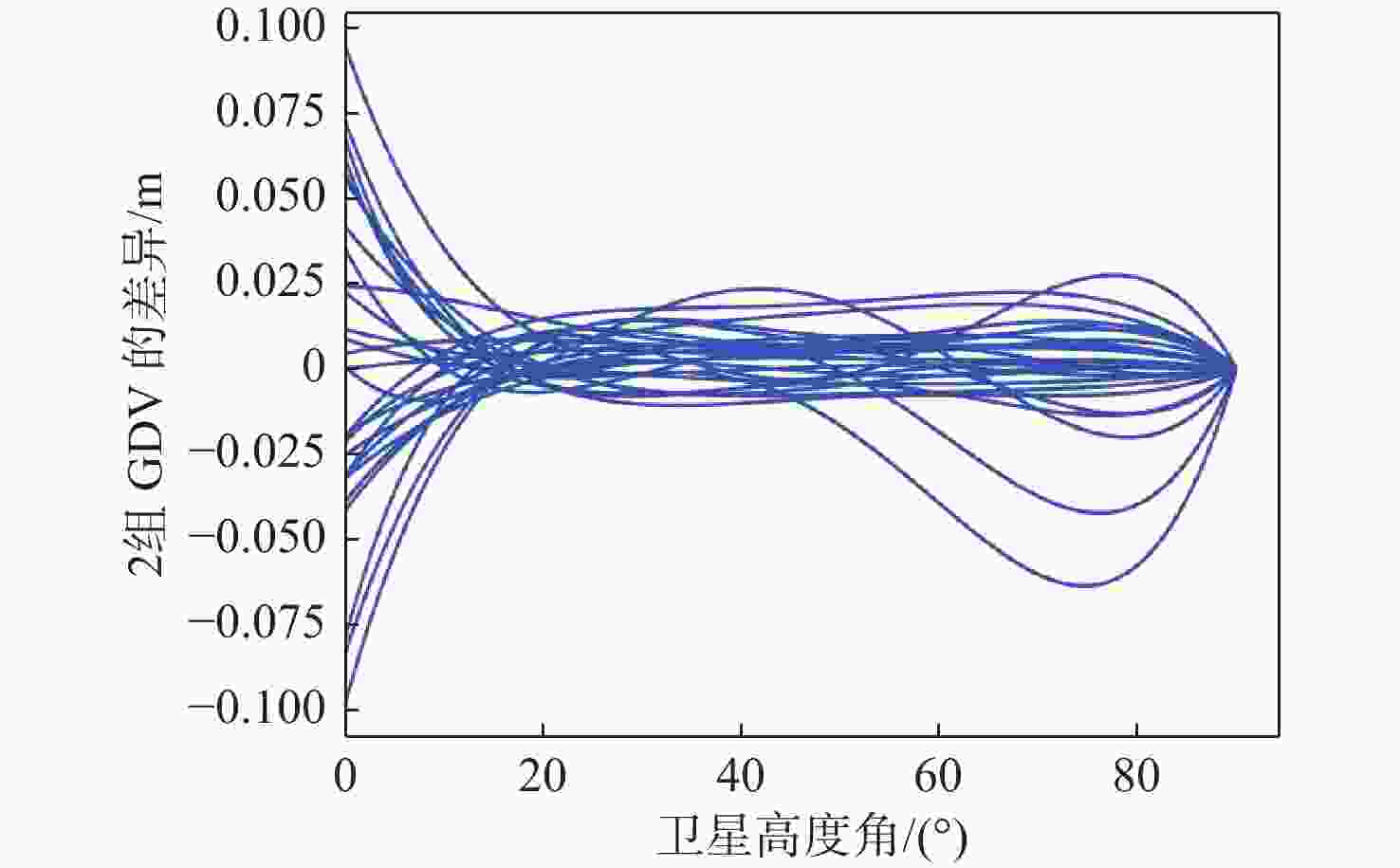
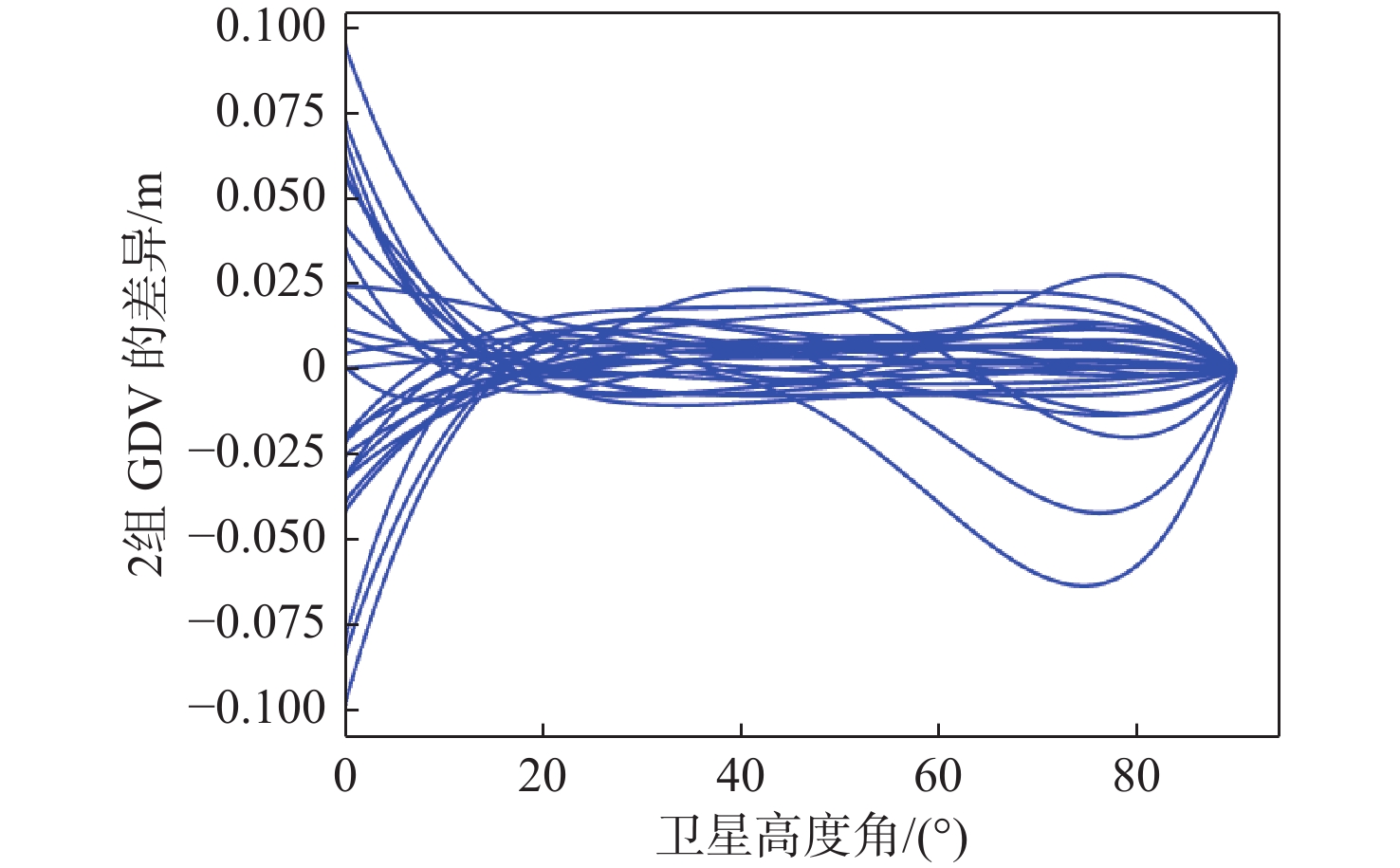
图 5 2组GDV参数(TLSE站与卫星)的差异
Figure 5. Differences between two sets of GDV parameters (between TLSE and satellites)
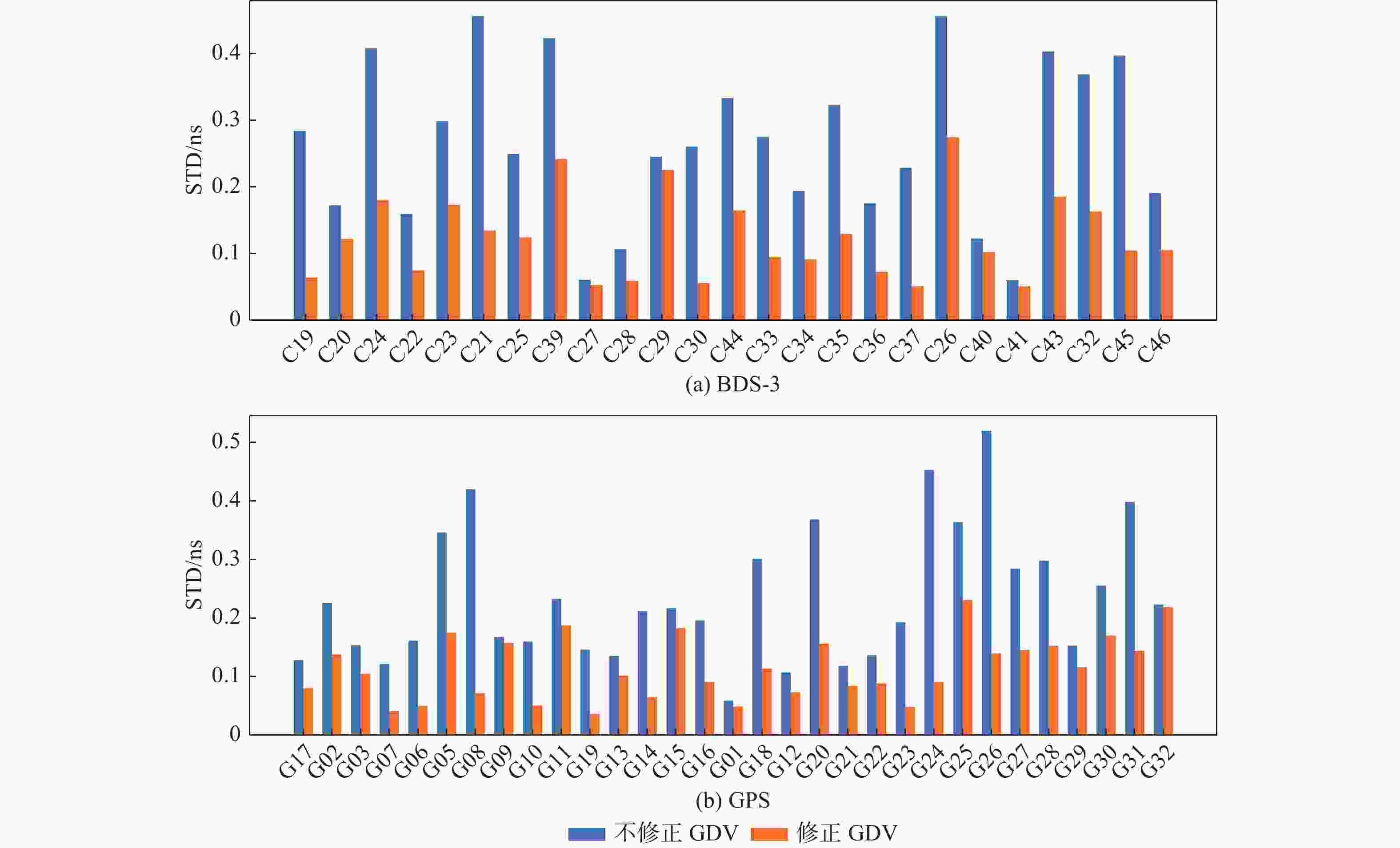
图 6 修正与不修正GDV时的钟差STD比较
Figure 6. Comparison of STD of clock offsets with or without GDV correction
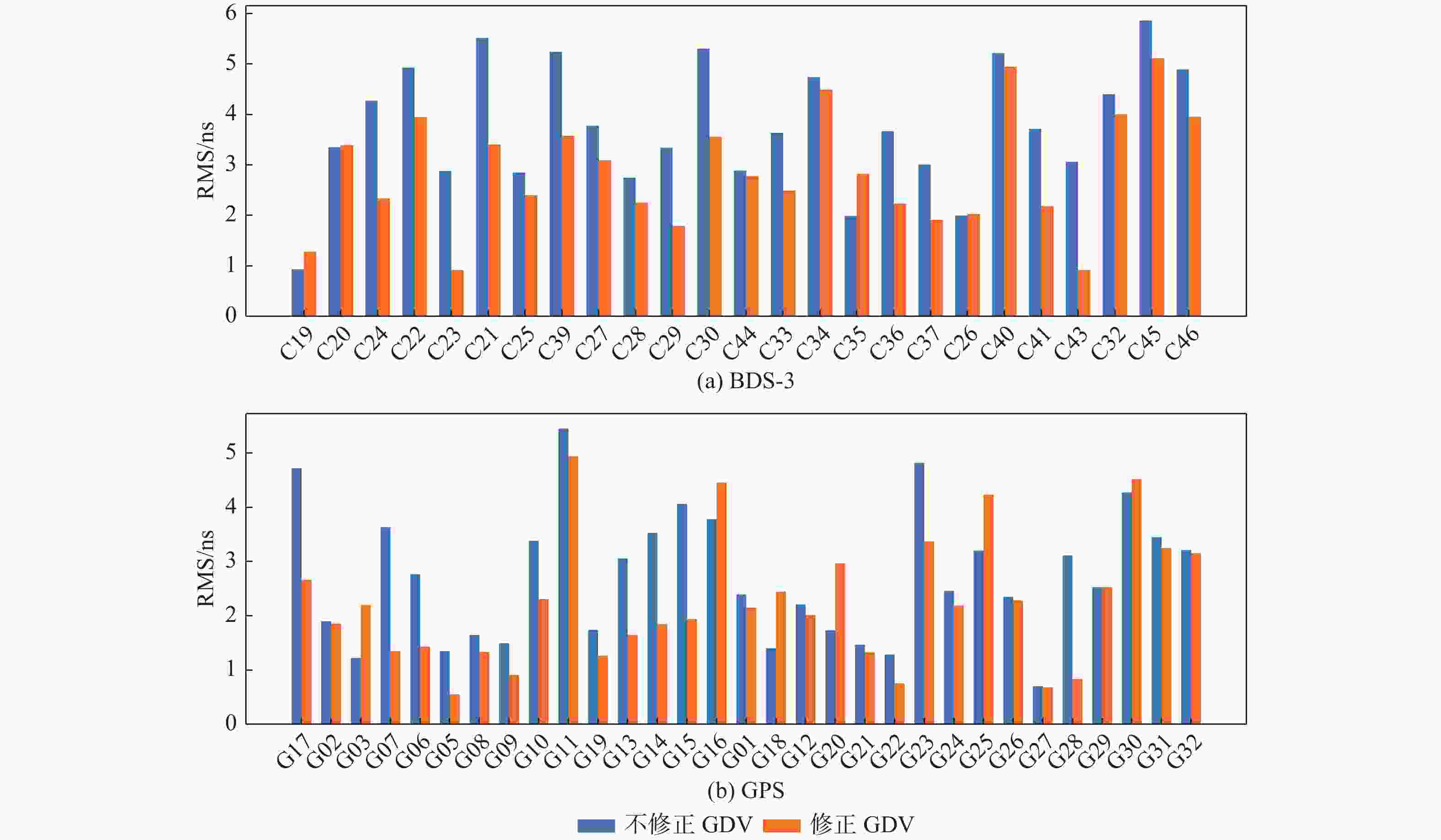
图 7 修正与不修正GDV时的钟差RMS比较
Figure 7. Comparison of RMS of clock offsets with or without GDV correction

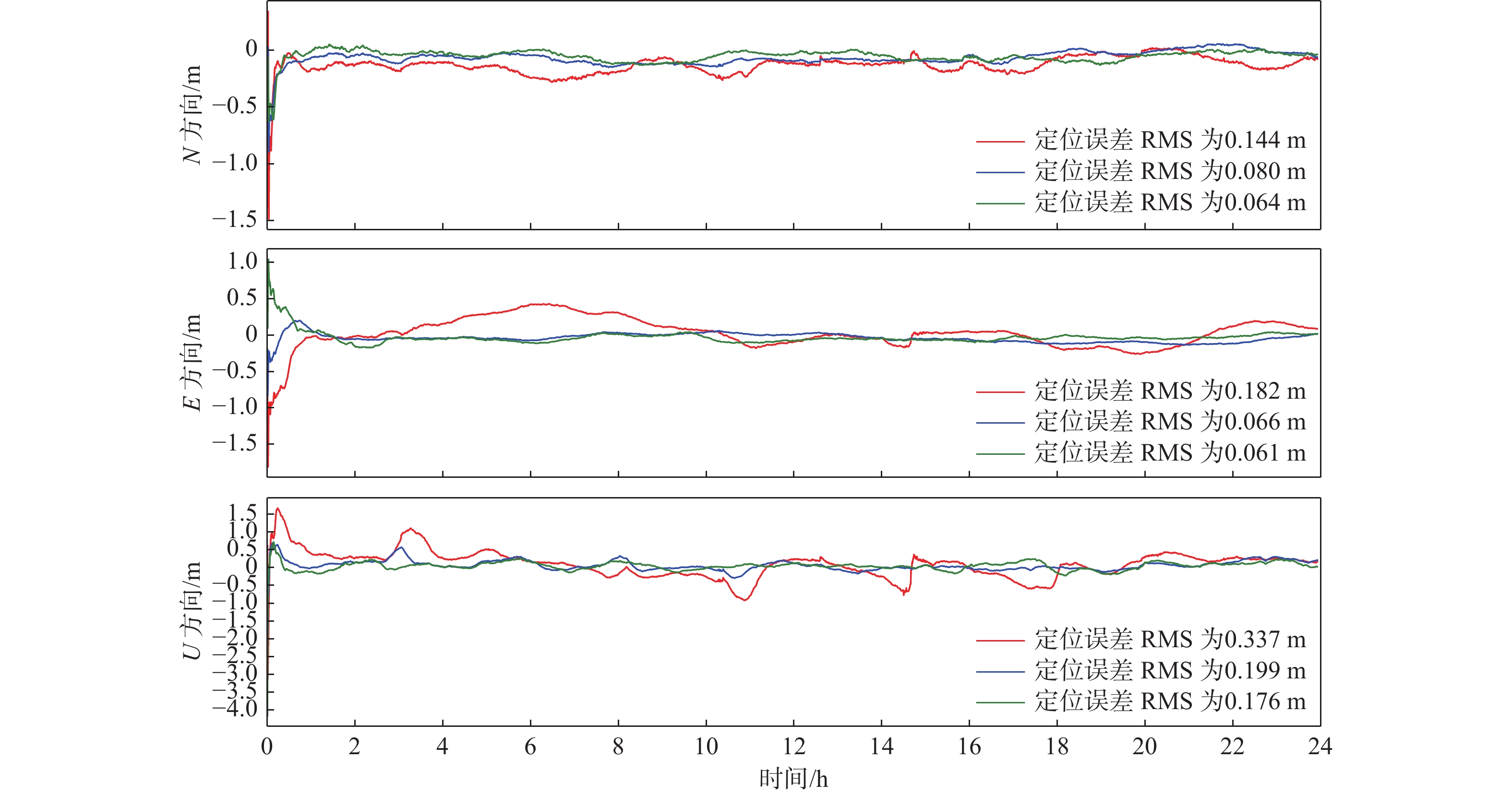
图 8 使用不考虑GDV改正的区域网钟差,GRAZ站单天动态PPP定位误差序列
Figure 8. Sequence of single-day kinematic PPP positioning error of GRAZ using regional real-time clock without GDV correction
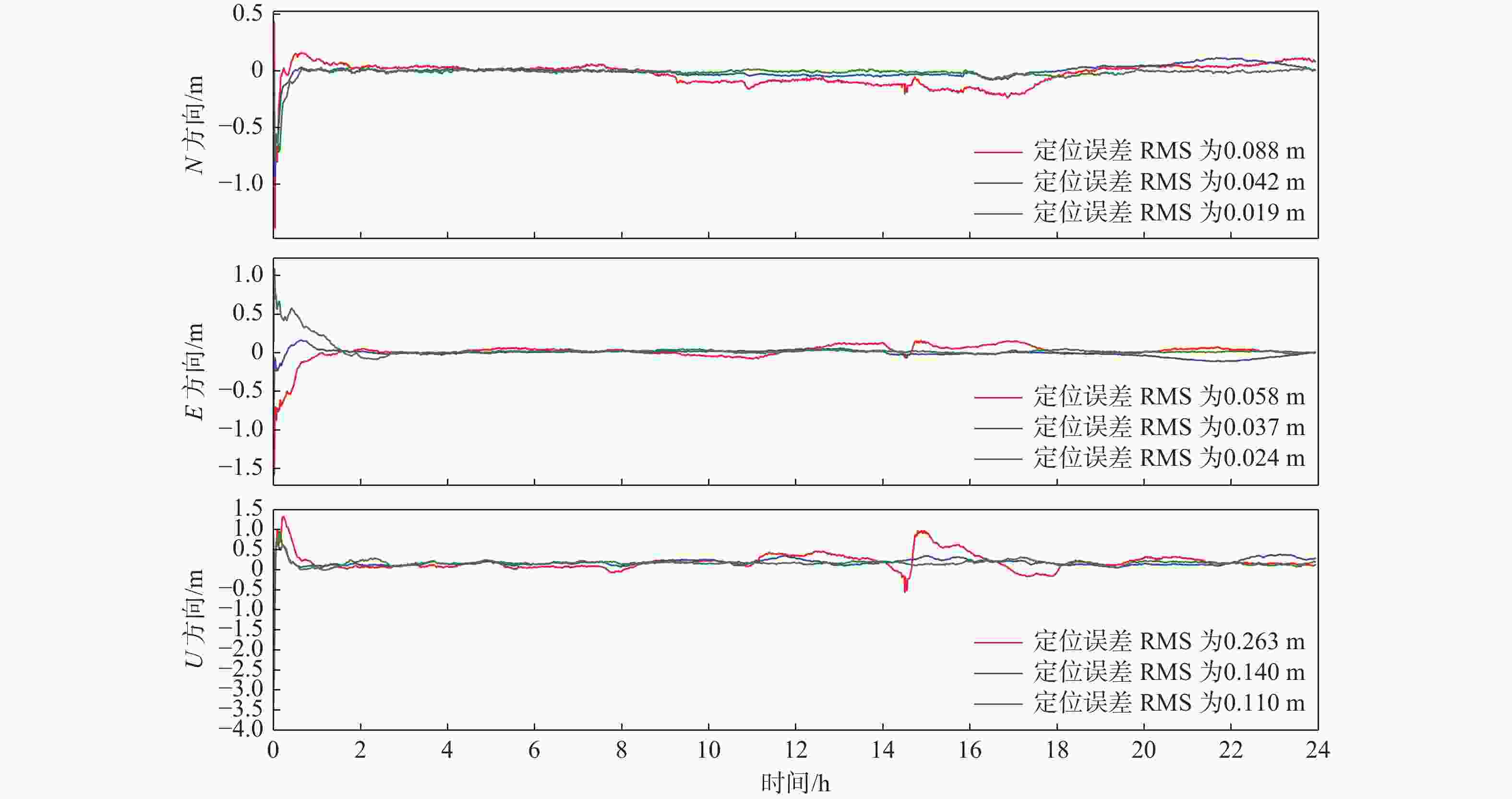
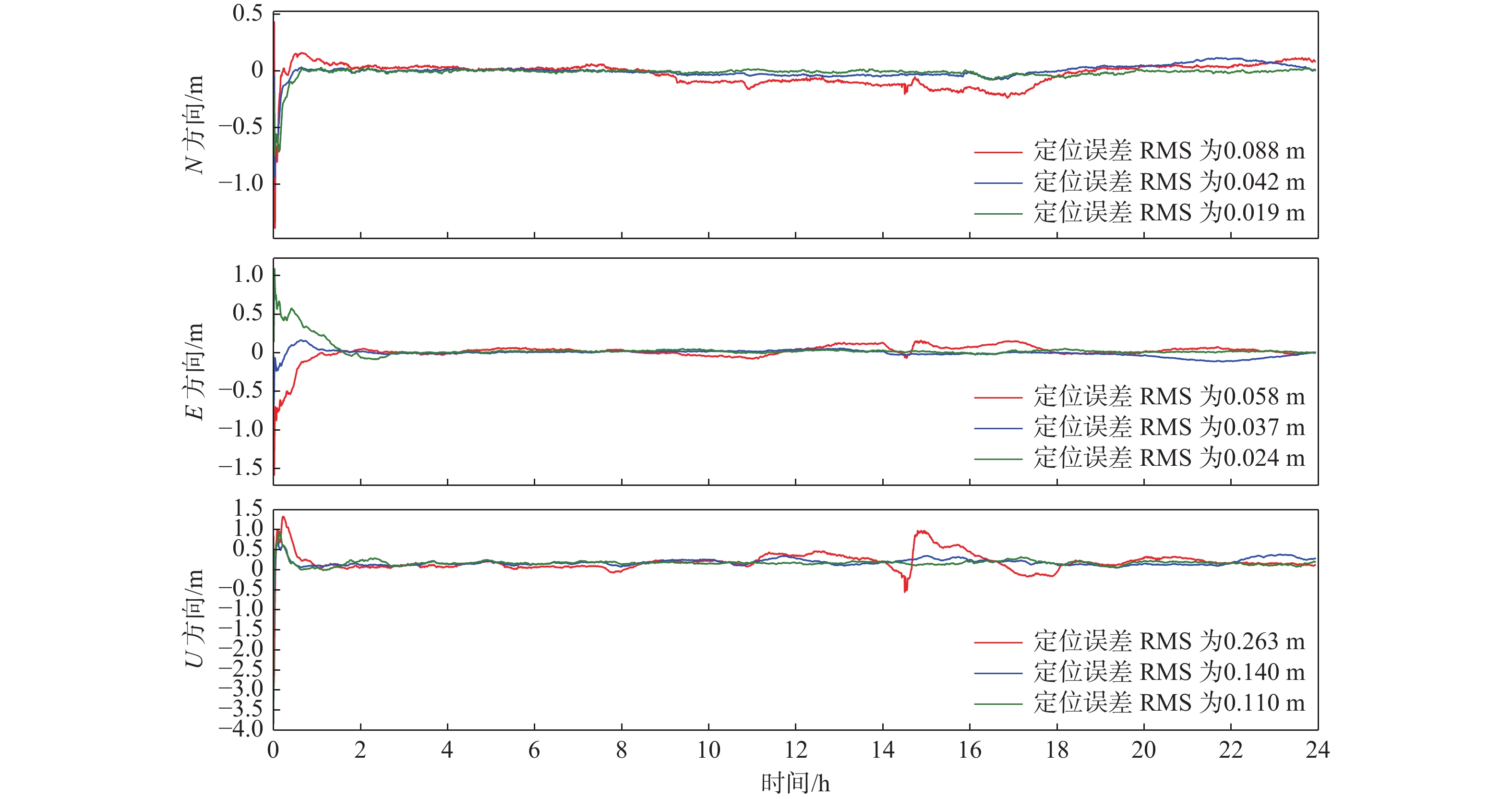
图 9 使用考虑GDV改正的区域网钟差,GRAZ站单天动态PPP定位误差序列
Figure 9. Sequence of single-day kinematic PPP positioning error of GRAZ using regional real-time clock with GDV correction
表 1 区域网钟差STD与RMS统计
Table 1. STD and RMS statistics of clock offset based on regional network
卫星 是否修正GDV STD/ns RMS/ns 最大值 平均值 最大值 平均值 BDS-3 不修正 0.46 0.27 5.86 3.77 修正 0.27 0.12 5.12 2.87 GPS 不修正 0.52 0.23 5.45 2.72 修正 0.23 0.11 4.94 2.24  下载: 导出CSV
下载: 导出CSV
表 2 使用不同钟差时,各测站仅BDS-3单系统动态PPP定位误差
Table 2. BDS-3-only kinematic PPP positioning error of each station using two different clocks
测站 水平方向定位误差/m 高程方向定位误差/m 不修正 修正 不修正 修正 BUCU 0.298 0.107 0.389 0.148 GRAZ 0.232 0.105 0.337 0.263 HUEG 0.271 0.128 0.293 0.281 ONSA 0.149 0.186 0.240 0.222 MAR7 0.181 0.157 0.275 0.243 MET3 0.323 0.122 0.356 0.326
下载: 导出CSV
表 3 使用不同钟差时,各测站仅GPS单系统动态PPP定位误差
Table 3. GPS-only kinematic PPP positioning error for each station using two different clocks
测站 水平方向定位误差/m 高程方向定位误差/m 不修正 修正 不修正 修正 BUCU 0.120 0.056 0.179 0.127 GRAZ 0.104 0.056 0.199 0.140 HUEG 0.132 0.062 0.202 0.138 ONSA 0.099 0.062 0.154 0.089 MAR7 0.124 0.048 0.218 0.178 MET3 0.277 0.147 0.320 0.273
下载: 导出CSV
表 4 使用不同钟差时,各测站GPS+BDS-3双系统动态PPP定位误差
Table 4. GPS+BDS-3 kinematic PPP positioning error for each station using two different clocks
测站 水平方向定位误差/m 高程方向定位误差/m 不修正 修正 不修正 修正 BUCU 0.115 0.043 0.156 0.120 GRAZ 0.088 0.031 0.176 0.110 HUEG 0.128 0.048 0.201 0.130 ONSA 0.097 0.039 0.152 0.063 MAR7 0.166 0.080 0.176 0.168 MET3 0.190 0.062 0.219 0.153
下载: 导出CSV
-
[1] KOUBA J, HÉROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS Solutions, 2001, 5(2): 12-28. doi: 10.1007/PL00012883 [2] HAUSCHILD A, MONTENBRUCK O. Kalman-filter-based GPS clock estimation for near real-time positioning[J]. GPS Solutions, 2009, 13(3): 173-182. doi: 10.1007/s10291-008-0110-3 [3] 李浩军, 王解先, 王虎, 等. 基于GNSS网络的卫星精密钟差估计及结果分析[J]. 武汉大学学报(信息科学版), 2010, 35(8): 1001-1003.LI H J, WANG J X, WANG H, et al. Precise clock error estimation of GPS satellite and analysis based on GNSS network[J]. Geomatics and Information Science of Wuhan University, 2010, 35(8): 1001-1003(in Chinese). [4] ZHANG X H, LI X X, GUO F. Satellite clock estimation at 1 Hz for realtime kinematic PPP applications[J]. GPS Solutions, 2011, 15(4): 315-324. doi: 10.1007/s10291-010-0191-7 [5] GE M R, CHEN J P, DOUŠA J, et al. A computationally efficient approach for estimating high-rate satelite clock corrections in realtime[J]. GPS Solutions, 2012, 16(1): 9-17. doi: 10.1007/s10291-011-0206-z [6] TANG C P, HU X G, CHEN J P, et al. Orbit determination, clock estimation and performance evaluation of BDS-3 PPP-B2b service[J]. Journal of Geodesy, 2022, 96(9): 60. doi: 10.1007/s00190-022-01642-9 [7] TAO J, LIU J N, HU Z G, et al. Initial assessment of the BDS-3 PPP-B2b RTS compared with the CNES RTS[J]. GPS Solutions, 2021, 25(4): 131. doi: 10.1007/s10291-021-01168-1 [8] SHI C, GUO S W, GU S F, et al. Multi-GNSS satellite clock estimation constrained with oscillator noise model in the existence of data discontinuity[J]. Journal of Geodesy, 2019, 93(4): 515-528. doi: 10.1007/s00190-018-1178-3 [9] LIU J H, TANG C P, ZHOU S S, et al. The bias in PPP-B2b real-time clock offset and the strategy to reduce it[J]. Remote Sensing, 2022, 14(18): 4569. doi: 10.3390/rs14184569 [10] 李显杰. 北斗群延迟变化建模[D]. 武汉: 武汉大学, 2018: 1-5.LI X J. Modeling of Beidou group delay change[D]. Wuhan: Wuhan University, 2018: 1-5(in Chinese). [11] HAUSCHILD A, MONTENBRUCK O, THOELERT S, et al. A multi-technique approach for characterizing the SVN49 signal anomaly, part 1: receiver tracking and IQ constellation[J]. GPS Solutions, 2012, 16(1): 19-28. doi: 10.1007/s10291-011-0203-2 [12] WÜBBENA G, SCHMITZ M, WARNEKE A. Geo++ absolute multi-frequency GNSS antenna calibration[EB/OL]. (2019-11-17)[2023-08-24]. http://www.geopp.com/pdf/gpp_cal125_euref19_p.pdf. [13] WANNINGER L, SUMAYA H, BEER S. Group delay variations of GPS transmitting and receiving antennas[J]. Journal of Geodesy, 2017, 91(9): 1099-1116. doi: 10.1007/s00190-017-1012-3 [14] BEER S, WANNINGER L, HEBELBARTH A. Estimation of absolute GNSS satellite antenna group delay variations based on those of absolute receiver antenna group delays[J]. GPS Solutions, 2021, 25(3): 1-10. [15] HAINES B J, BAR-SEVER Y E, BERTIGER W I, et al. Realizing a terrestrial reference frame using the global positioning system[J]. Journal of Geophysical Research: Solid Earth, 2015, 120(8): 5911-5939. doi: 10.1002/2015JB012225 [16] BEER S, WANNINGER L. Temporal stability of GPS transmitter group delay variations[J]. Sensors, 2018, 18(6): 1744. doi: 10.3390/s18061744 [17] 楼益栋. 导航卫星实时精密轨道与钟差确定[D]. 武汉: 武汉大学, 2008.LOU Y D. Research on real-time precise GPS orbit and clock offset determination[D]. Wuhan: Wuhan University, 2008(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 206
- HTML全文浏览量: 63
- PDF下载量: 13
- 被引次数: 0
