



-
摘要:
滑跑起降是无人飞行器(UAVs)起飞和回收的一种主要方式,滑跑过程中的跑道保持和纠偏控制对飞行器的安全性具有关键的作用。为了解决高亚声速无人飞行器滑跑起降过程中的纠偏控制问题,设计以非线性制导算法为主要前馈环节,结合实时侧偏距进行反馈补偿的滑跑纠偏控制方法,并开展仿真验证;为了克服实际系统中执行机构控制误差等不确定扰动的影响,引入自抗扰控制中的线性扩张状态观测器(LESO),对滑跑纠偏控制过程中的非线性不确定项进行估计,并反馈补偿到滑跑纠偏控制律中。仿真与实际滑跑试验表明:所提方法可以在存在初始位置偏差及执行机构控制误差的情况下,实现较高滑跑速度工况的高精度稳定纠偏控制,满足高亚声速无人飞行器自主起降控制的需求。
Abstract:Ground taxiing takeoff and landing is a major way for unmanned aerial vehicles (UAVs) to take off and recover. The runway maintenance and lateral deviation correction control during the taxiing process play a key role in the safety of the aircraft. A deviation correction control method is proposed to solve the lateral deviation correction control problem for high subsonic UAVs. The real-time cross-track error is included as a feedback compensation, and the nonlinear guiding algorithm serves as the primary feedforward in the method’s design. Simulation is carried out, to verify the proposed method. This study introduces the linear extended state observer (LESO) in the active disturbance rejection control to mitigate the impact of unknown disturbances, including actuator control inaccuracy. The nonlinear uncertain term during the deviation correction control process is estimated by the observer, and feedback compensation is added to the control law. Through simulation and actual taxiing experiments, the proposed method can realize high-precision stable correction control under high taxiing speed, even in the presence of initial position deviation and actuator control error, so as to meet the need for autonomous take-off and landing control for high subsonic UAVs.
-
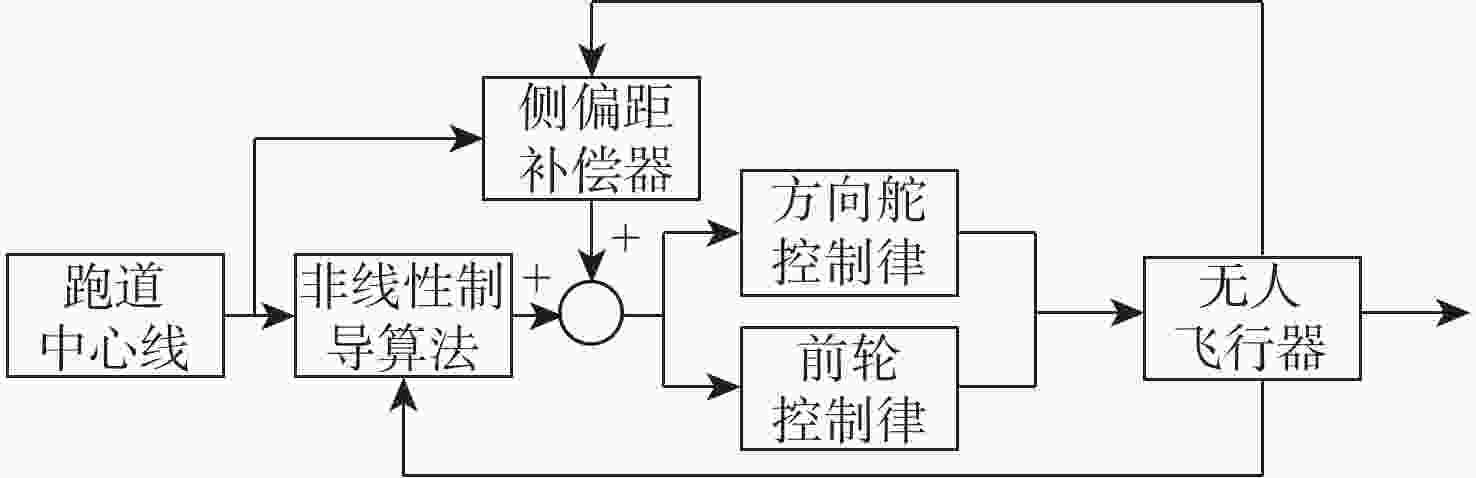
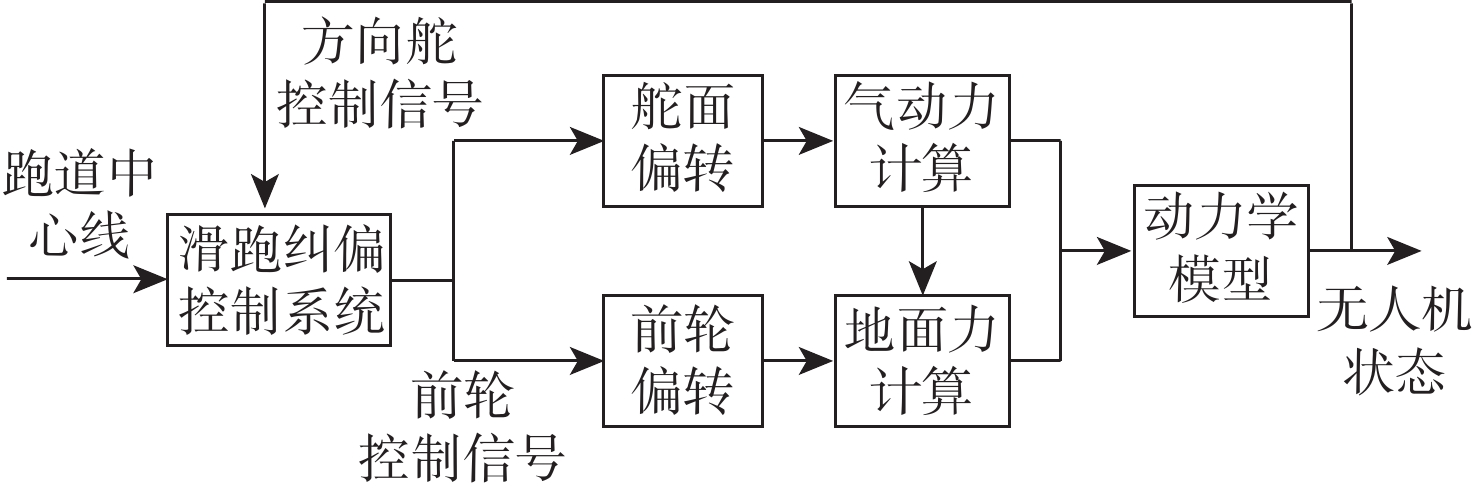
图 2 滑跑纠偏控制系统框架
Figure 2. Structure of taxiing lateral deviation correction control system
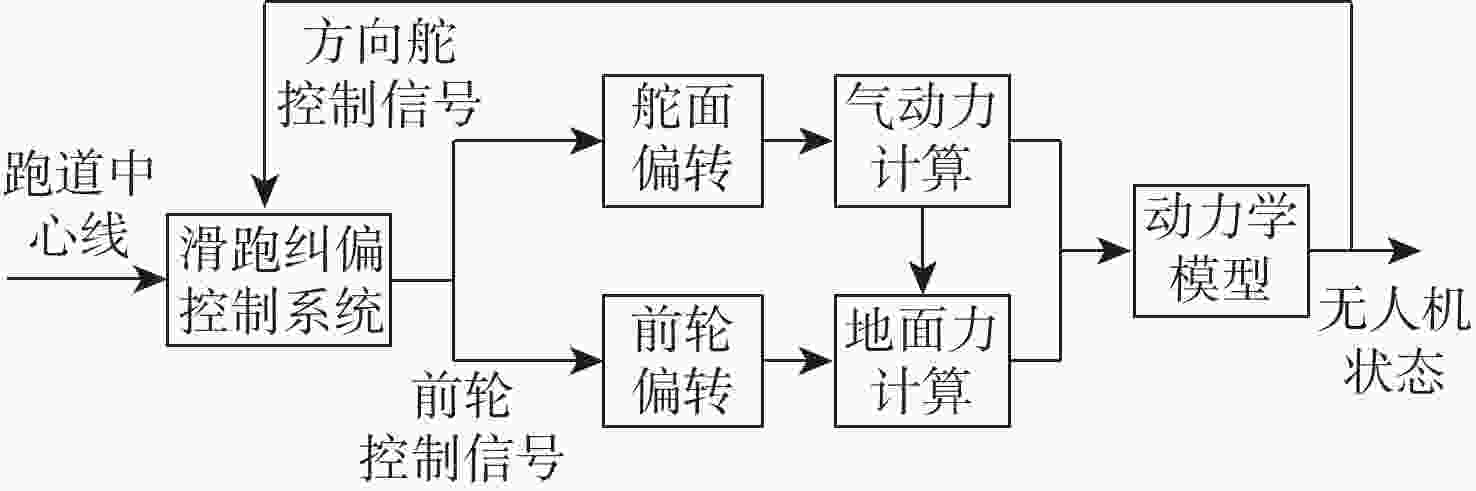
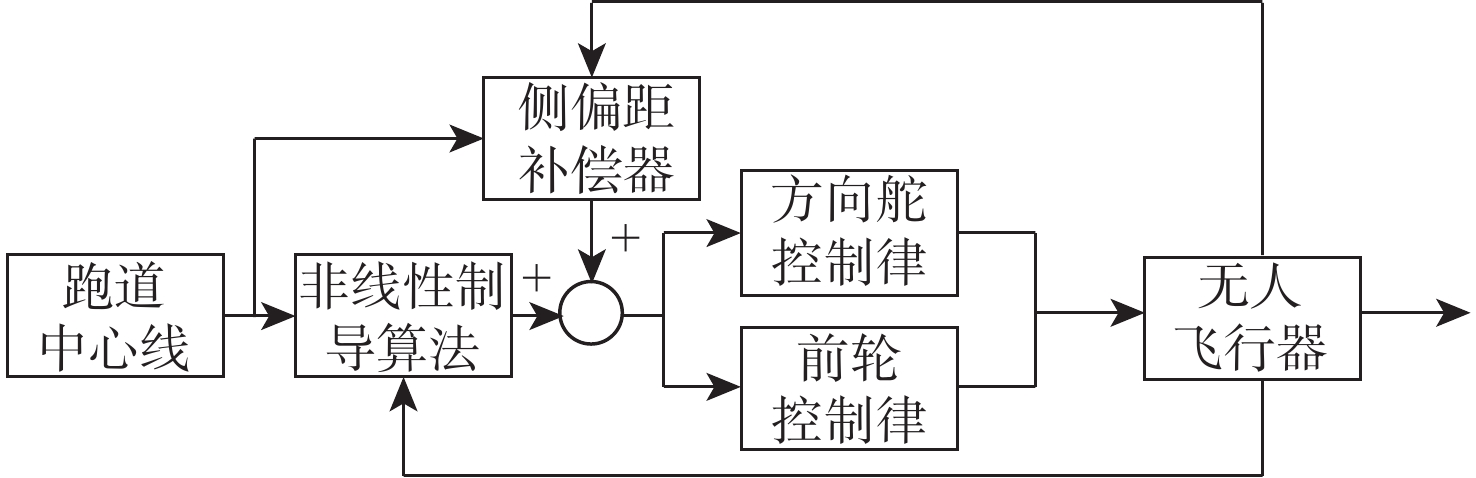
图 3 基于非线性制导算法的滑跑纠偏控制仿真结构
Figure 3. Simulation structure of taxiing lateral deviation correction control based on nonlinear guidance algorithm
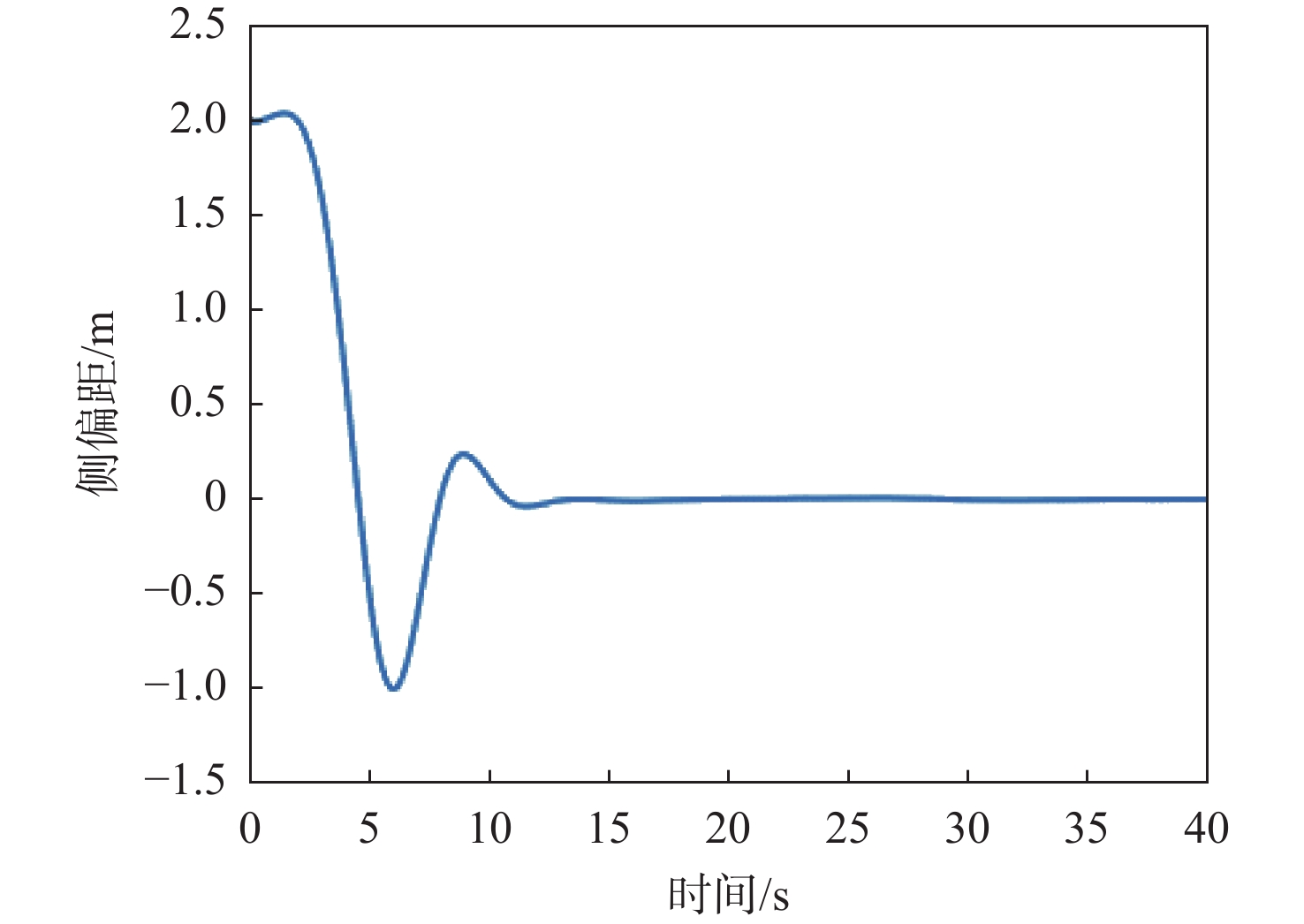
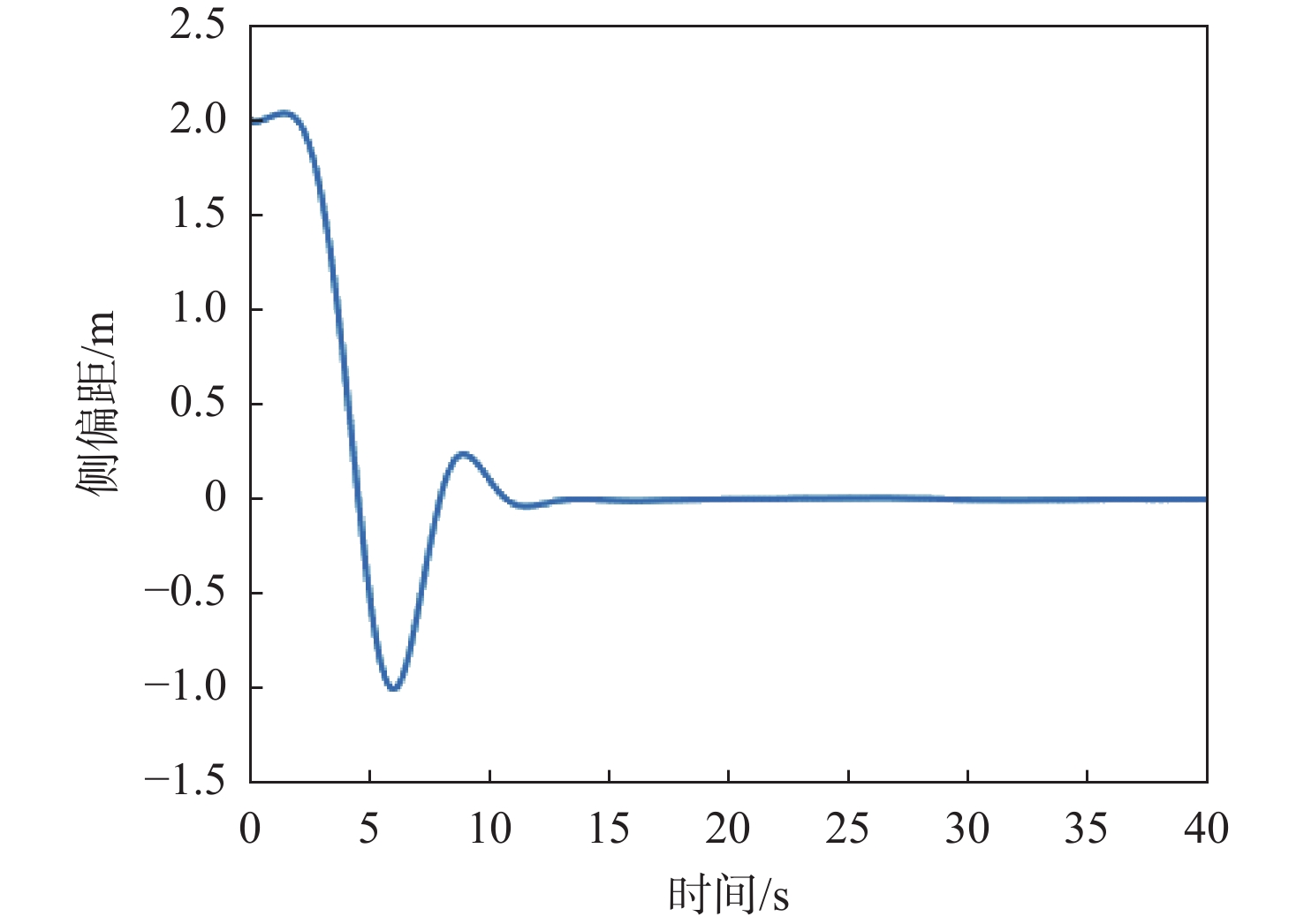
图 4 模拟起飞过程侧偏距仿真结果
Figure 4. Side deviation simulation results during simulation of takeoff
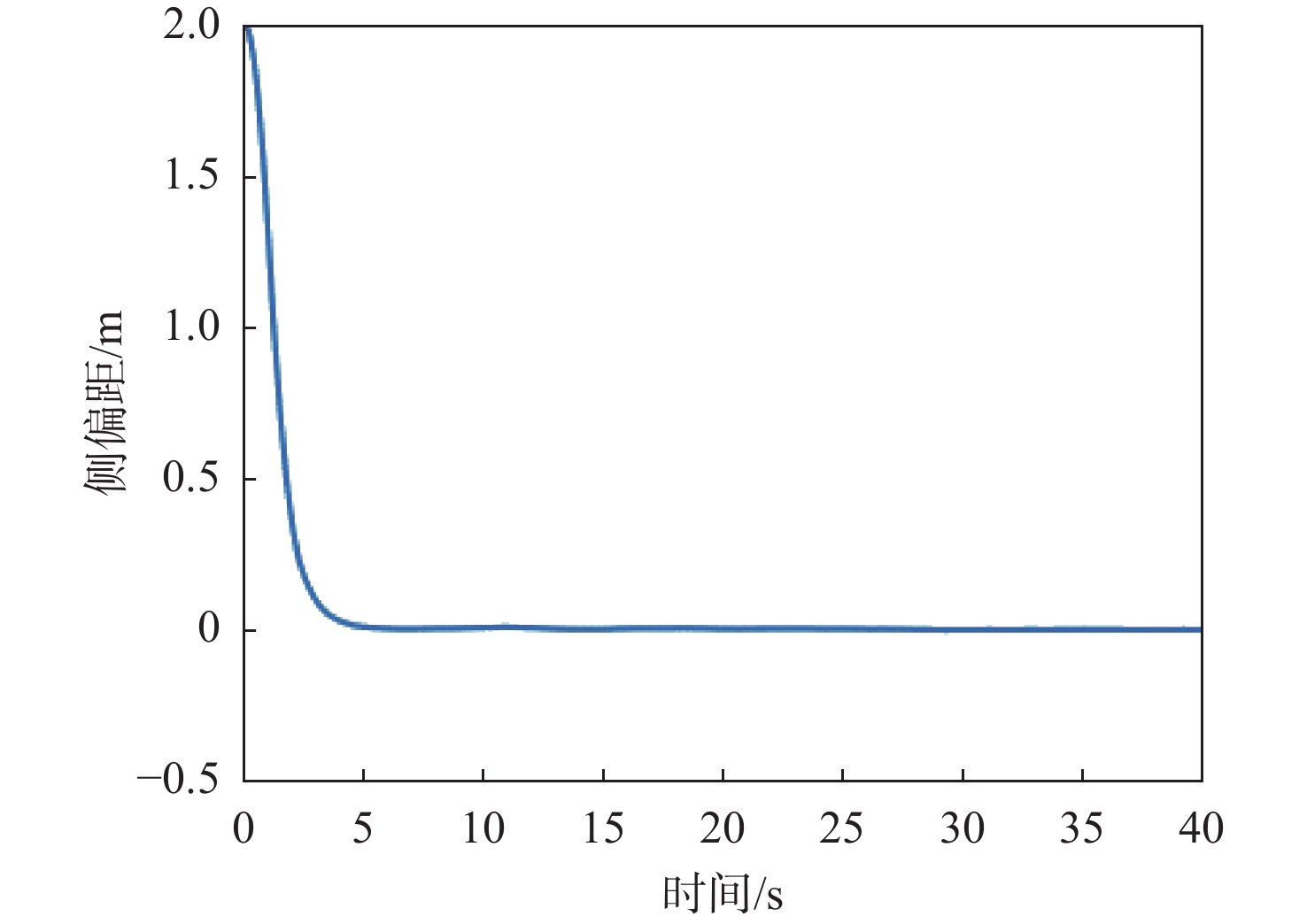
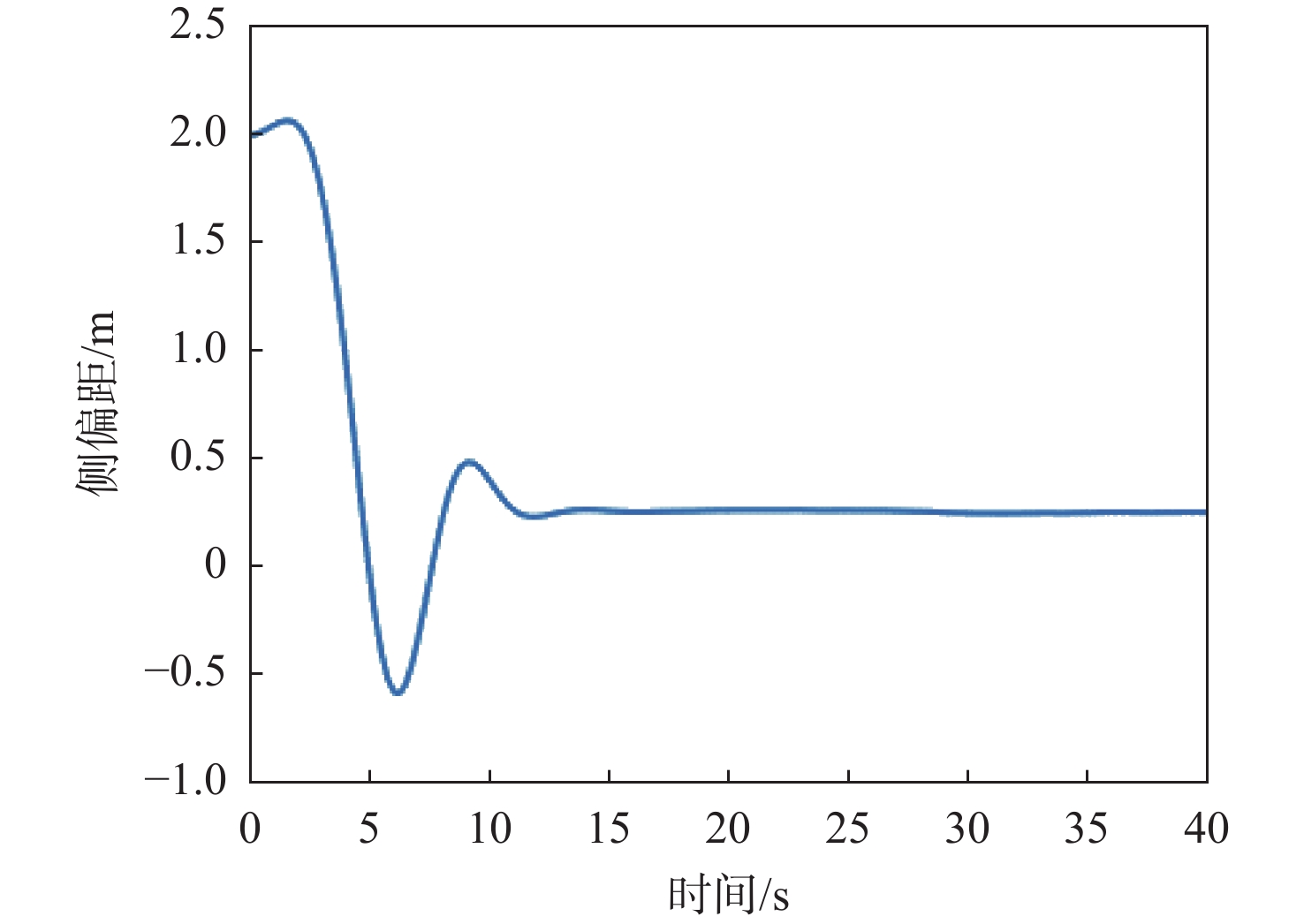
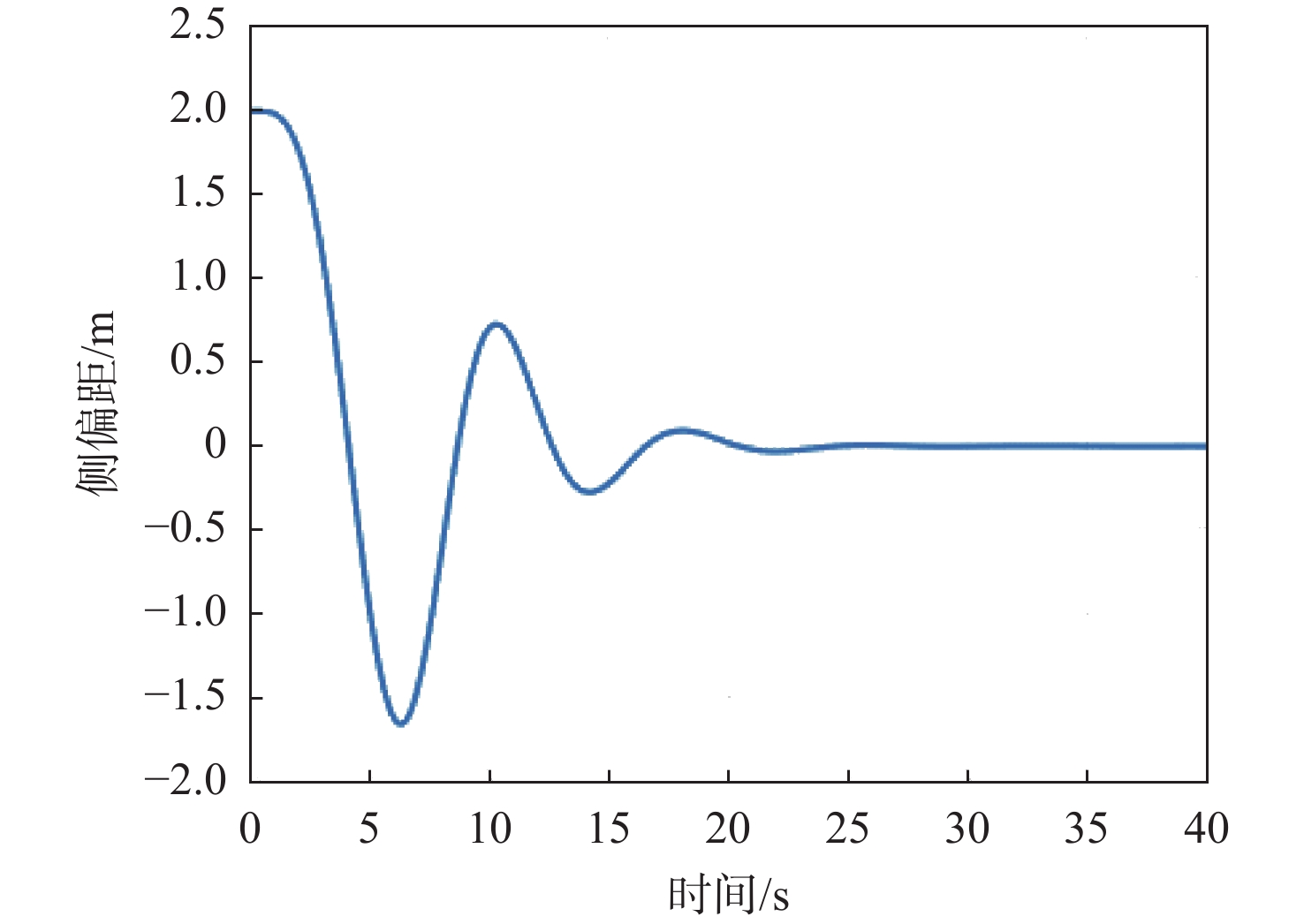
图 7 模拟回收过程侧偏距仿真结果
Figure 7. Side deviation simulation results during simulation of recovery process
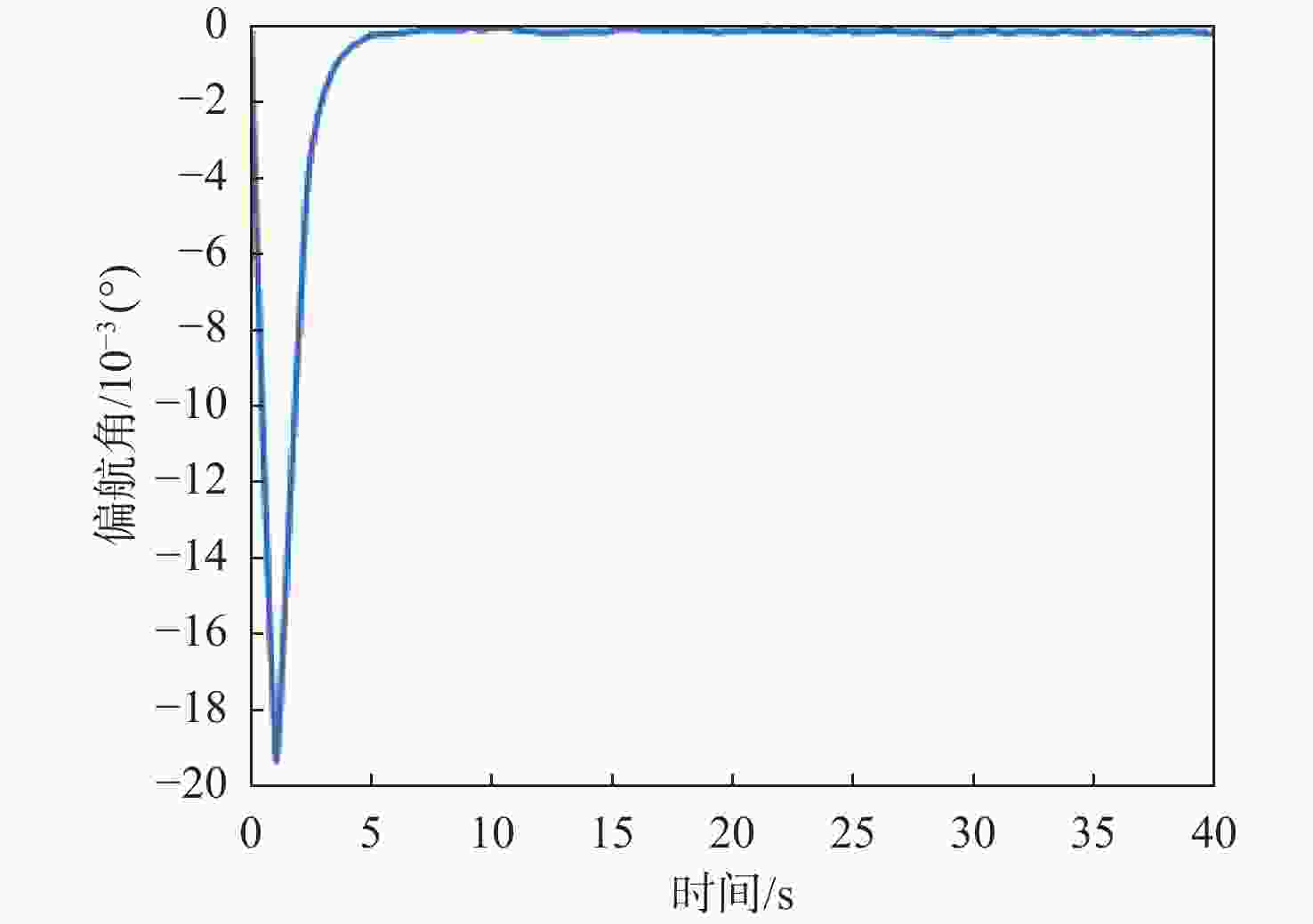
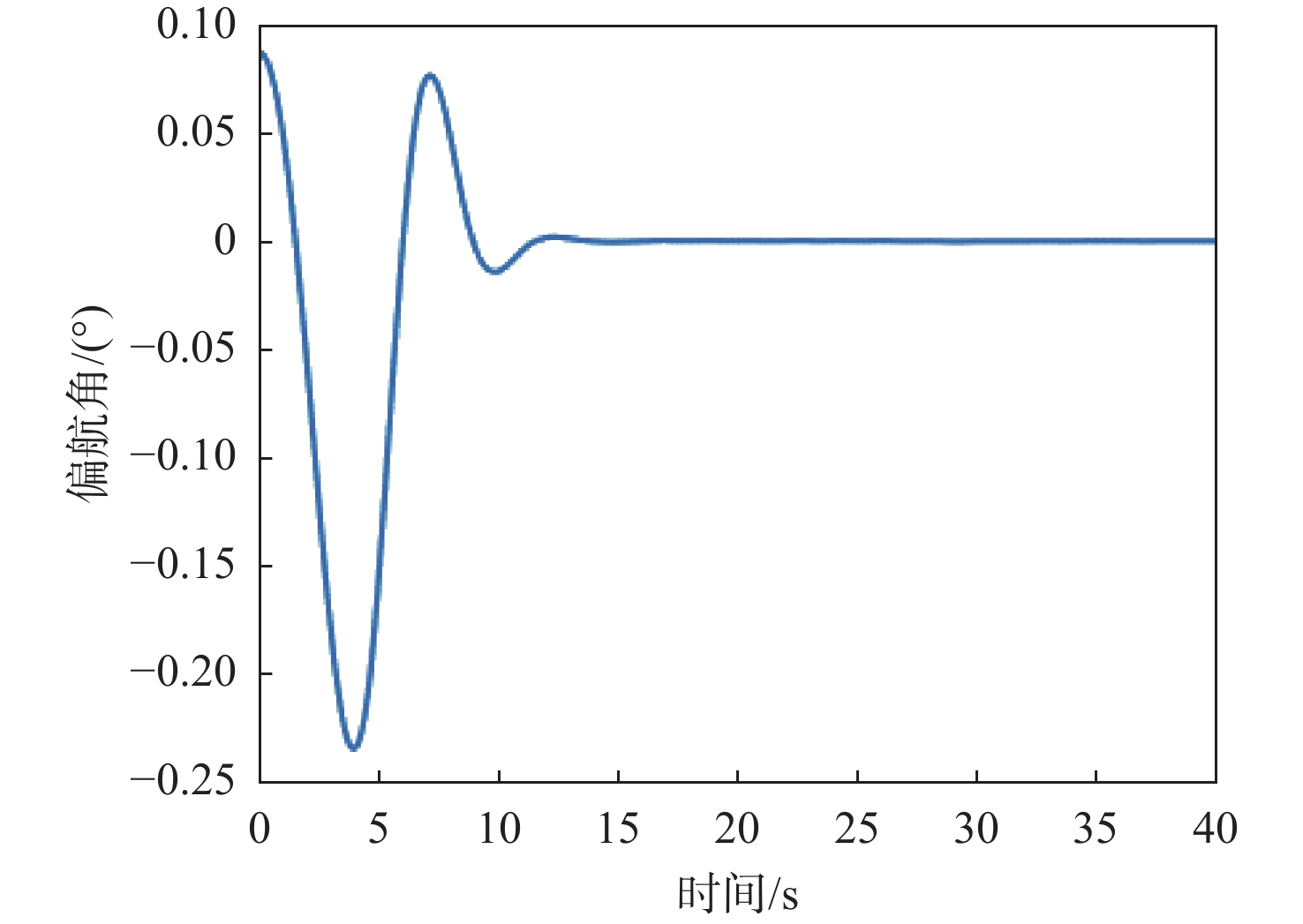
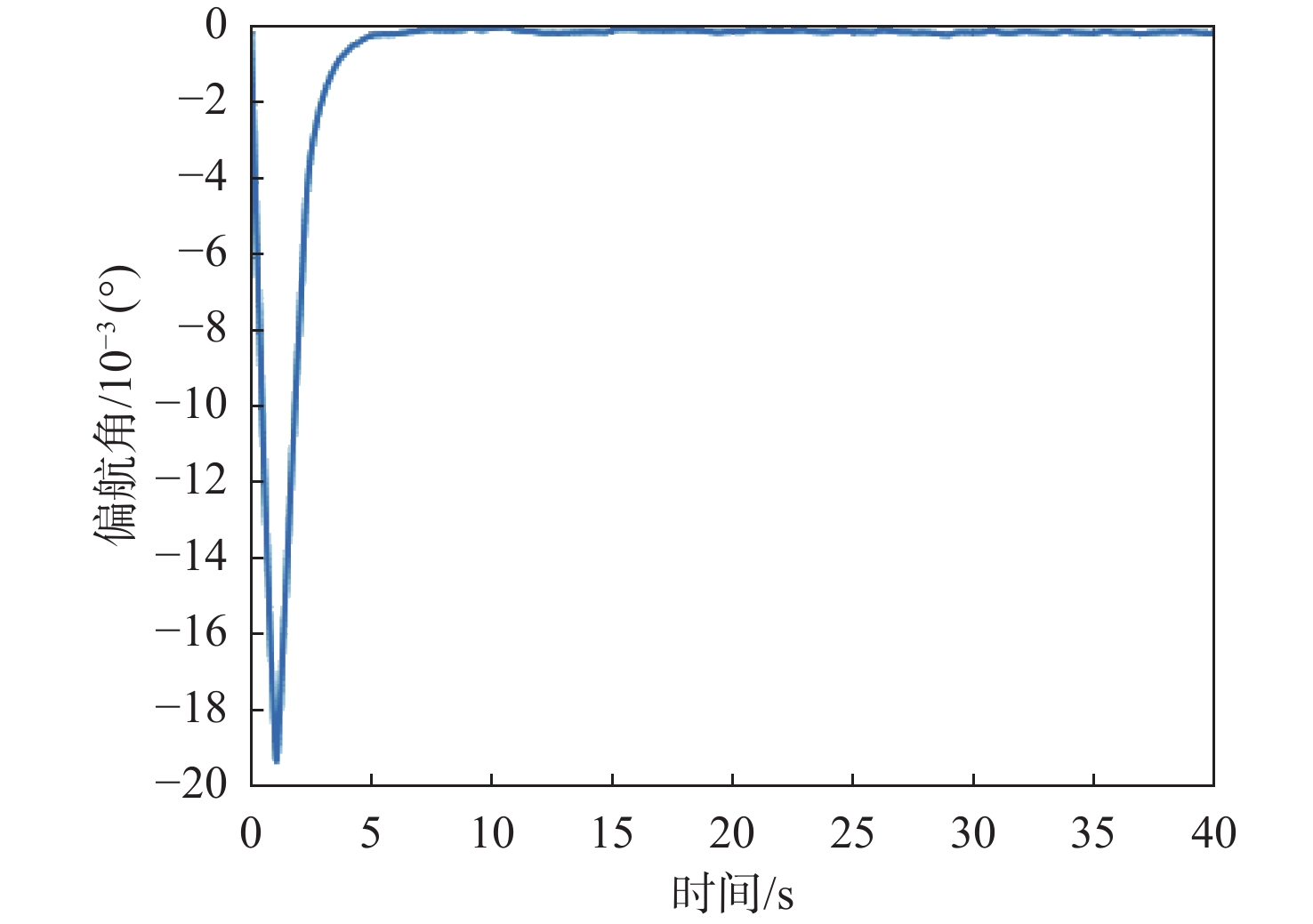
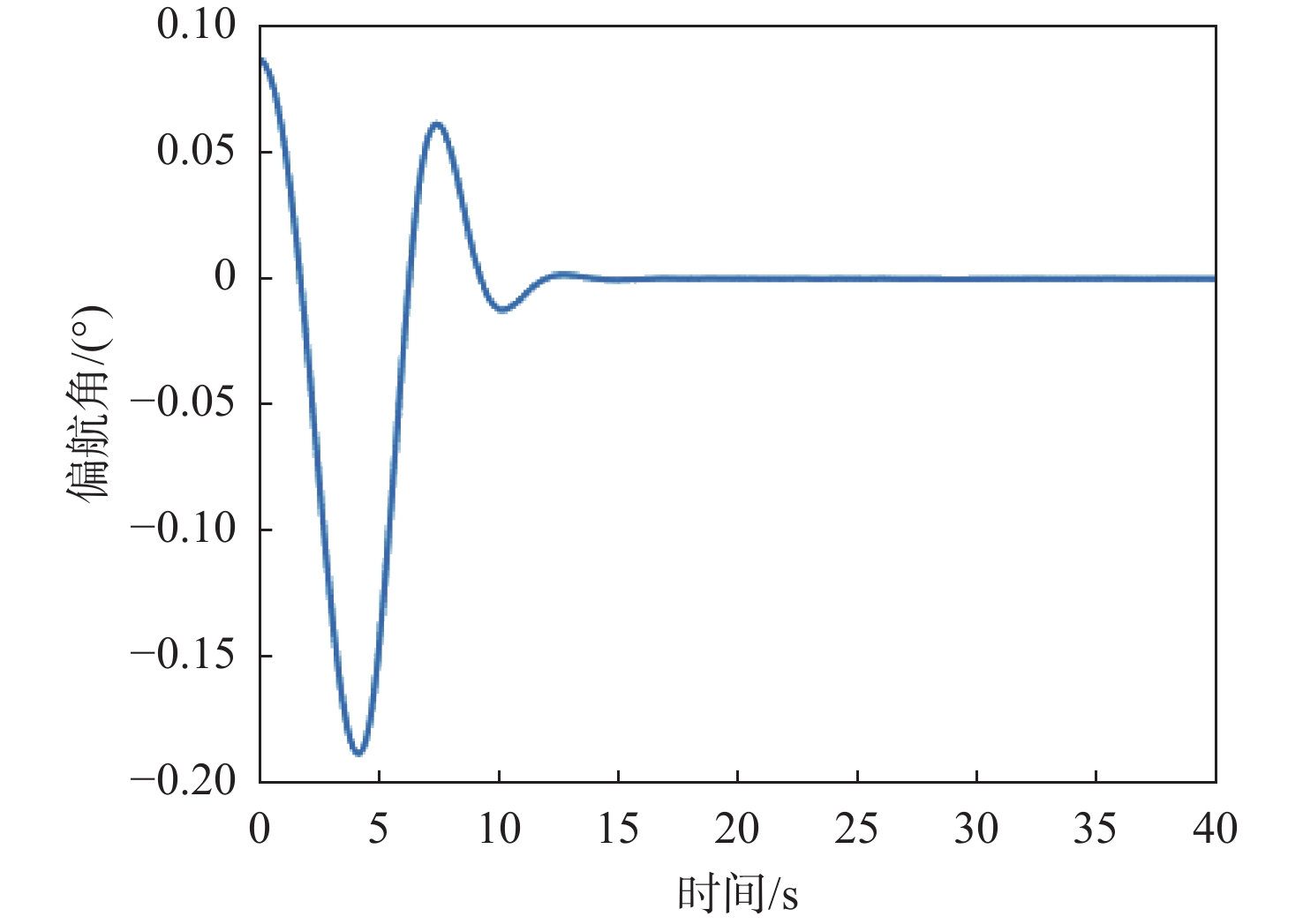
图 8 模拟回收过程偏航角仿真结果
Figure 8. Yaw angle simulation results during simulation of recovery process
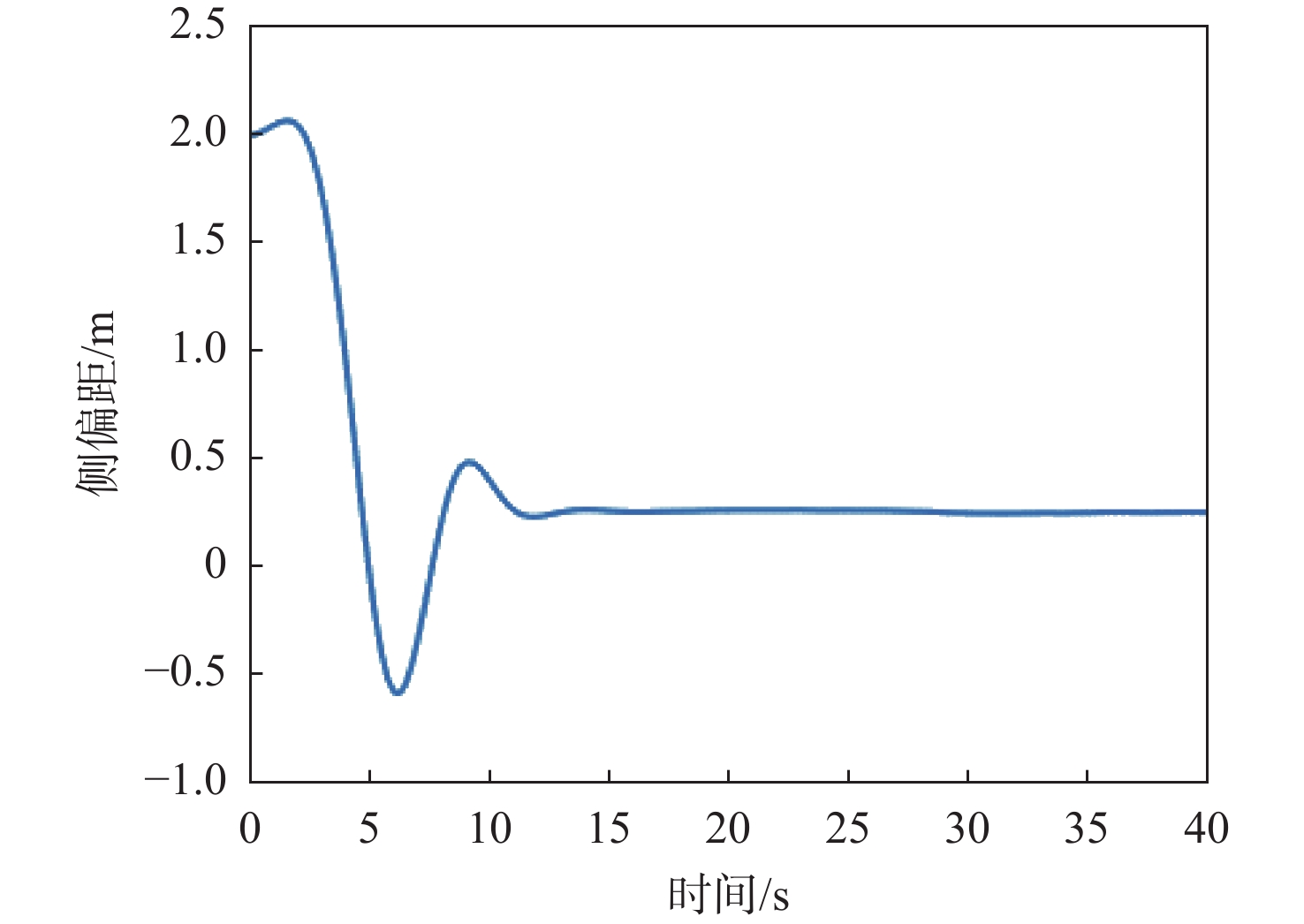
图 9 系统误差情况下模拟起飞过程侧偏距仿真结果
Figure 9. Simulation results of side deviation during simulation of takeoff with system error
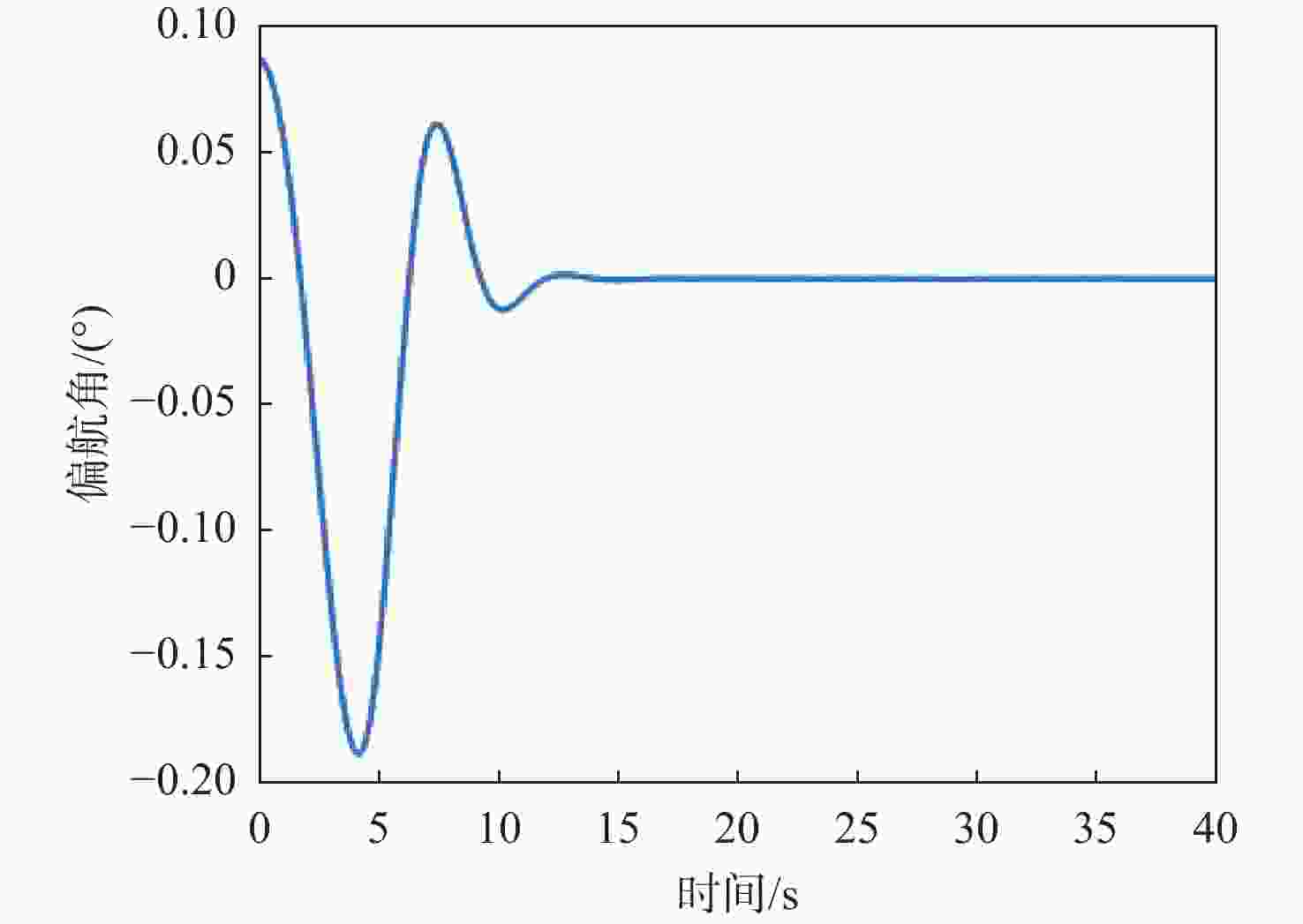
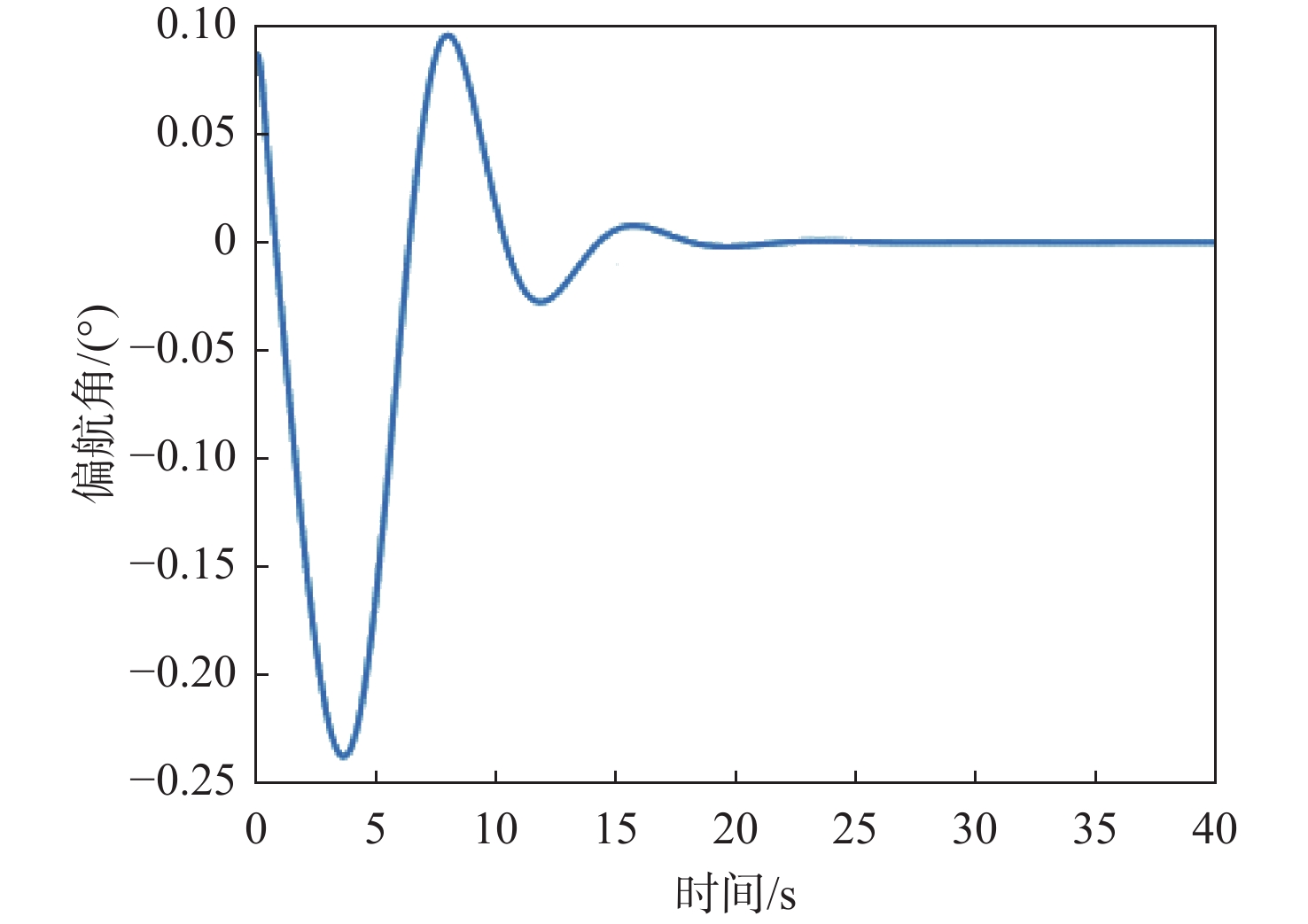
图 10 系统误差情况下模拟起飞过程偏航角仿真结果
Figure 10. Simulation results of yaw angle during simulation of takeoff with system error
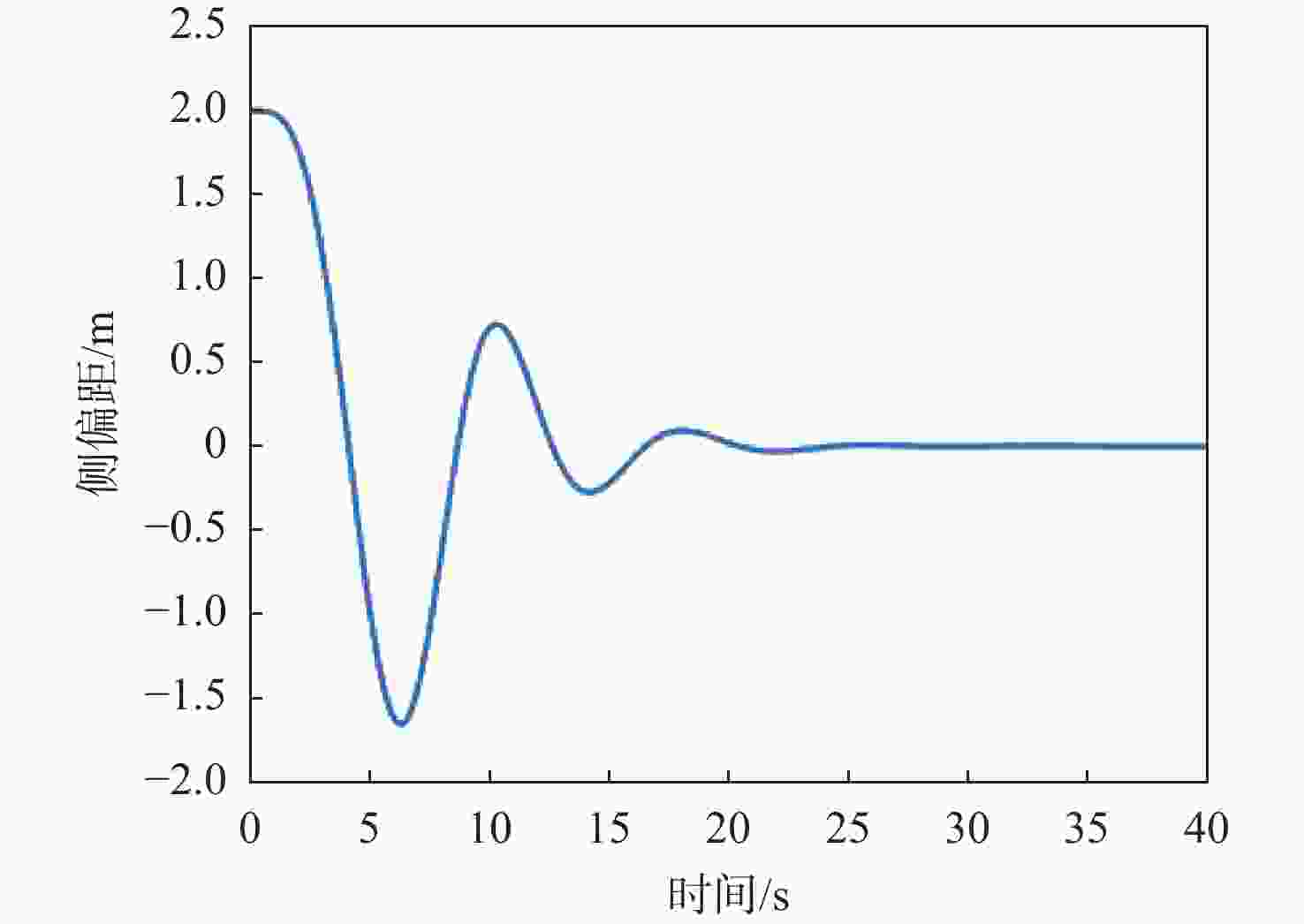
图 11 系统误差情况下改进方法侧偏距仿真结果
Figure 11. Side deviation results in simulation with system error based on improved method
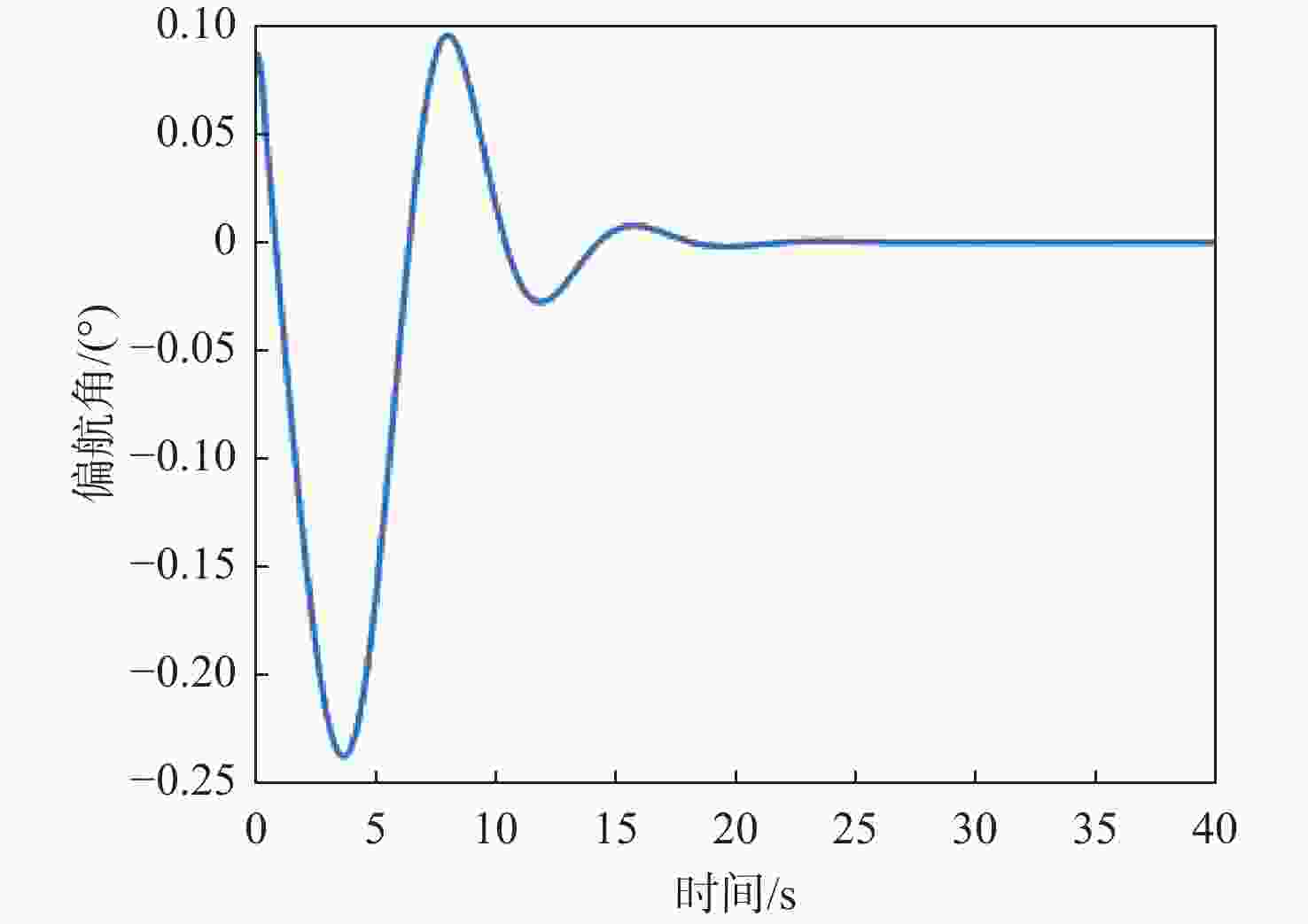
图 12 系统误差情况下改进方法偏航角仿真结果
Figure 12. Yaw angle results in simulation with system error based on improved method
图 14 滑跑试验平台基本构型
Figure 14. Basic configuration of slide running platform used in experiment
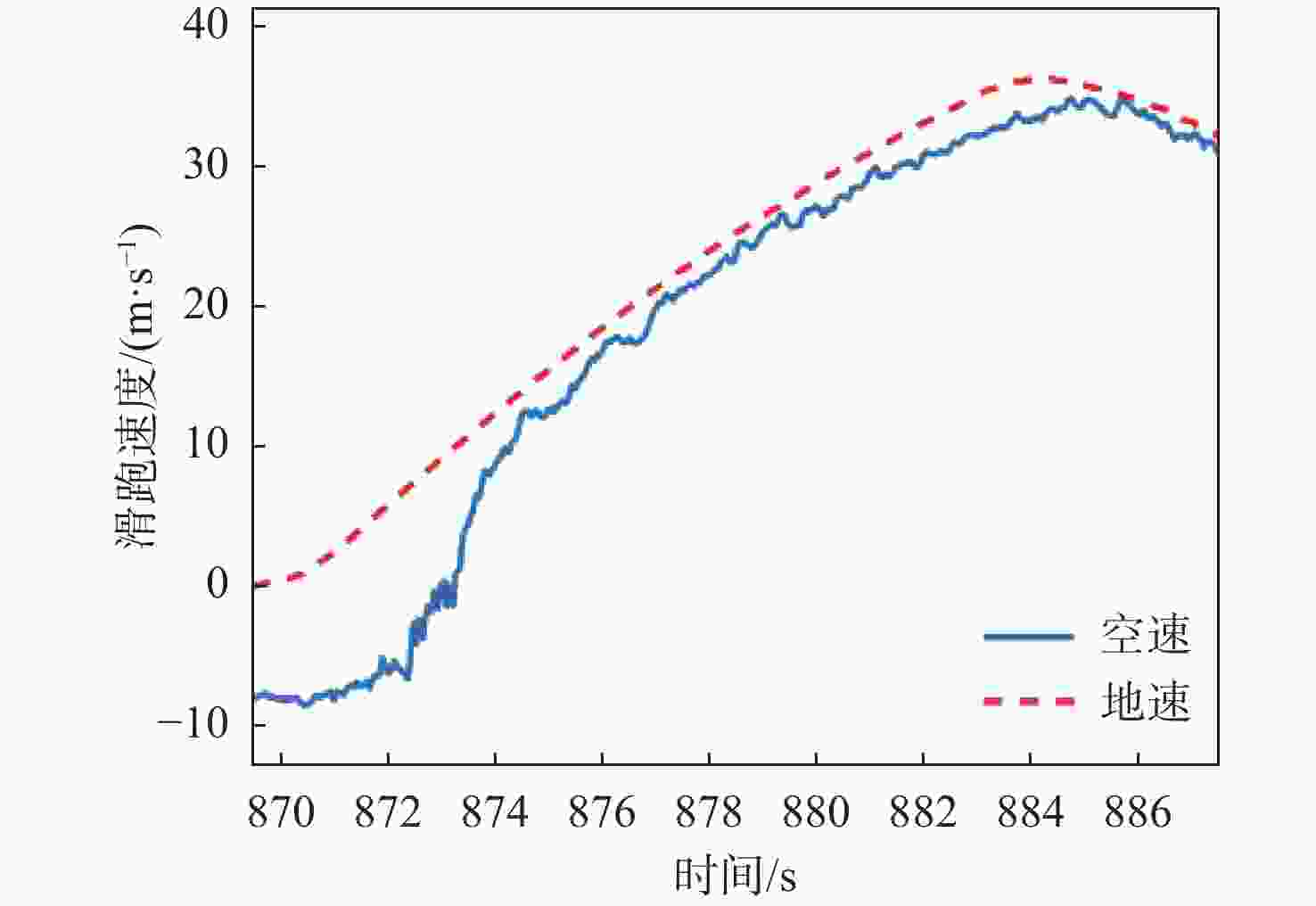
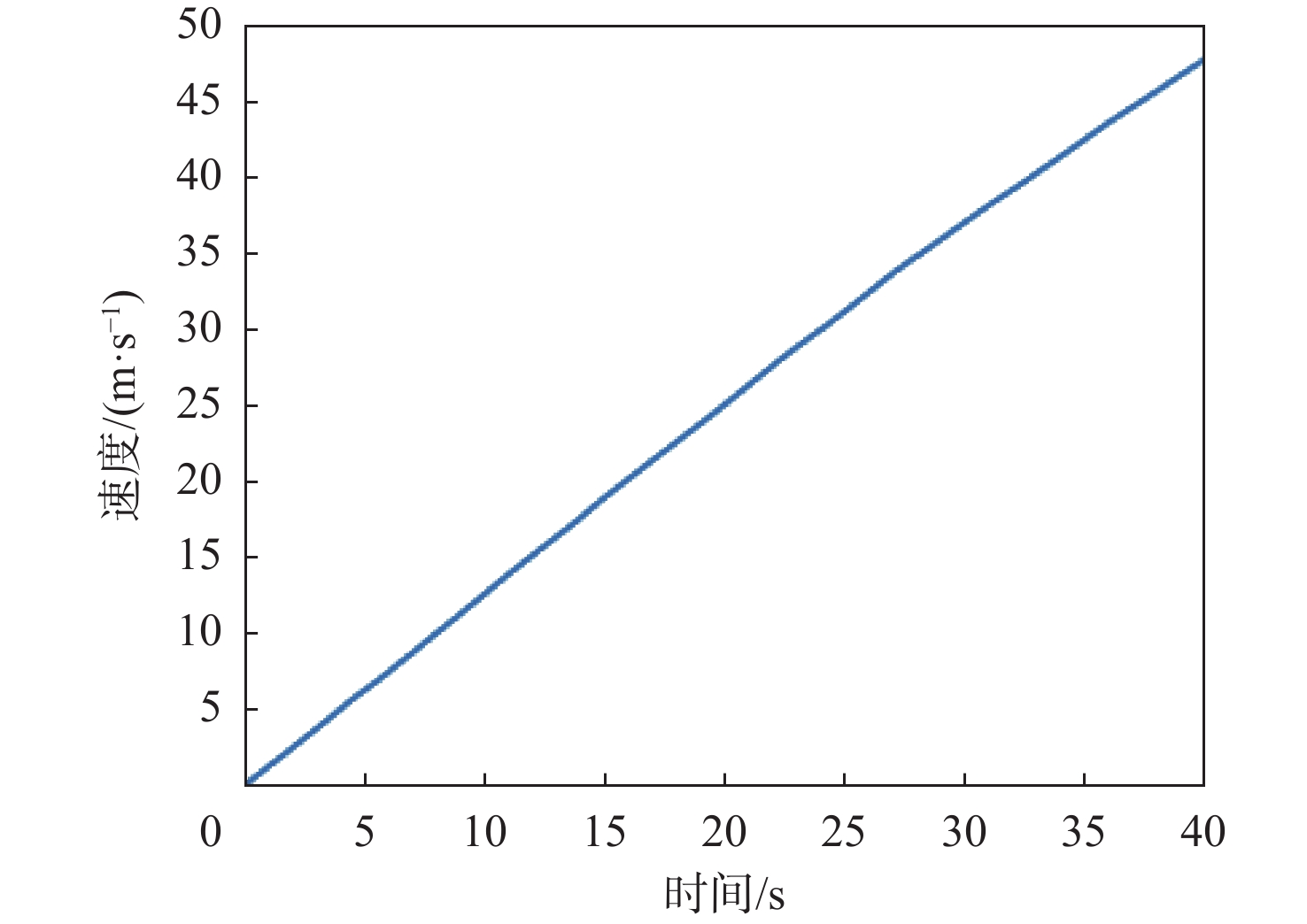
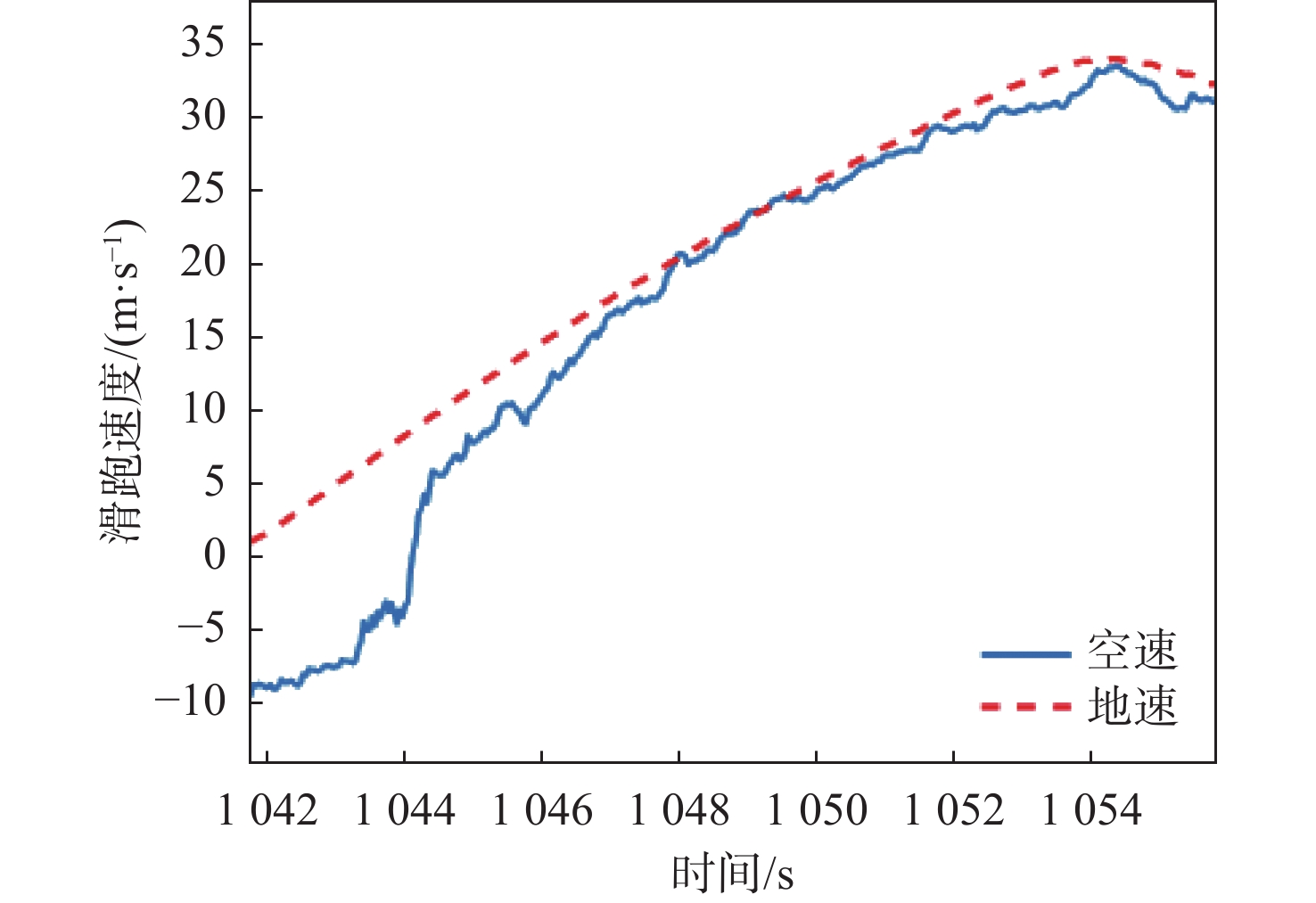
图 18 初始位置偏差情况下滑跑速度曲线
Figure 18. Taxiing velocity curves during experiment with initial position error
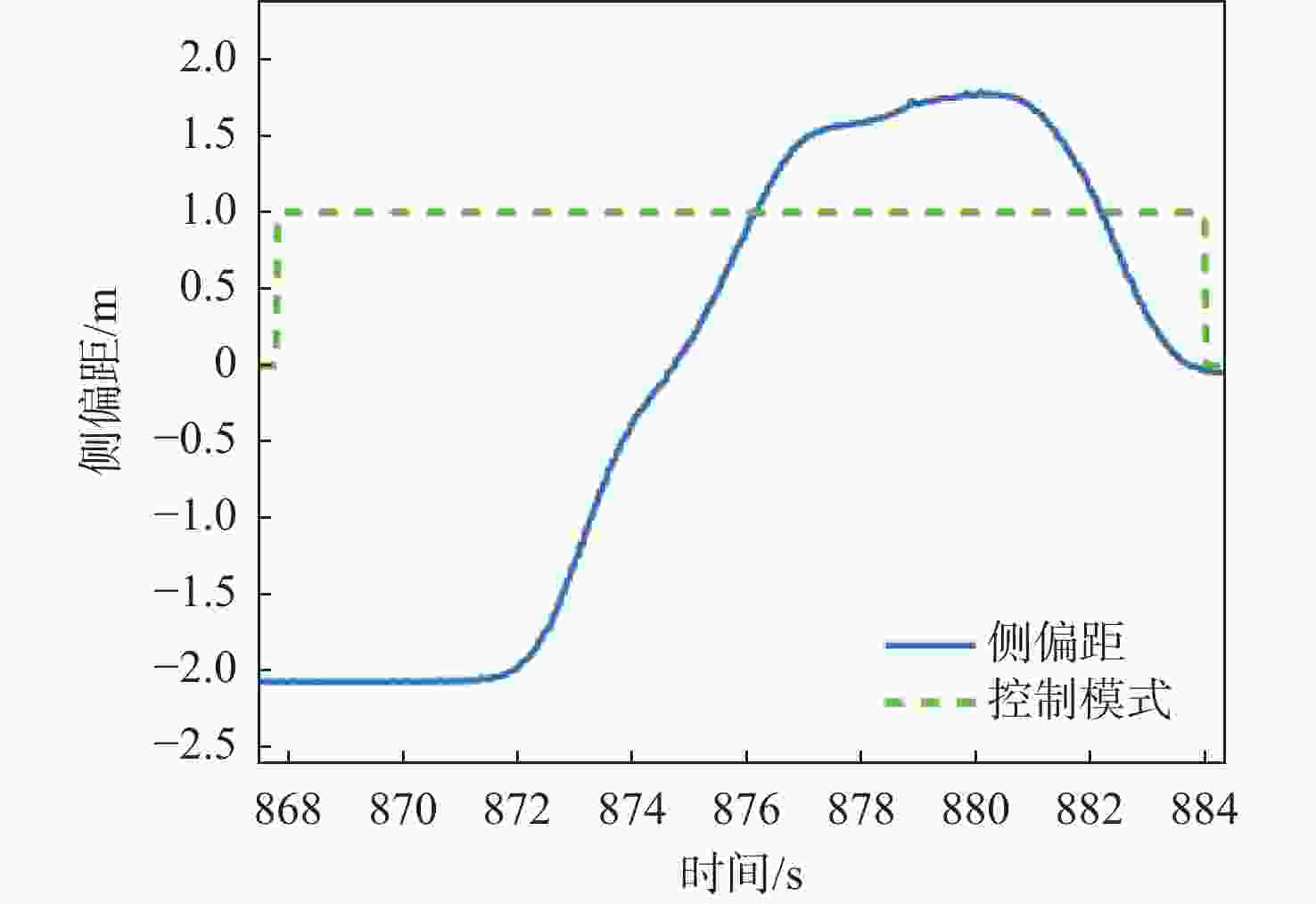
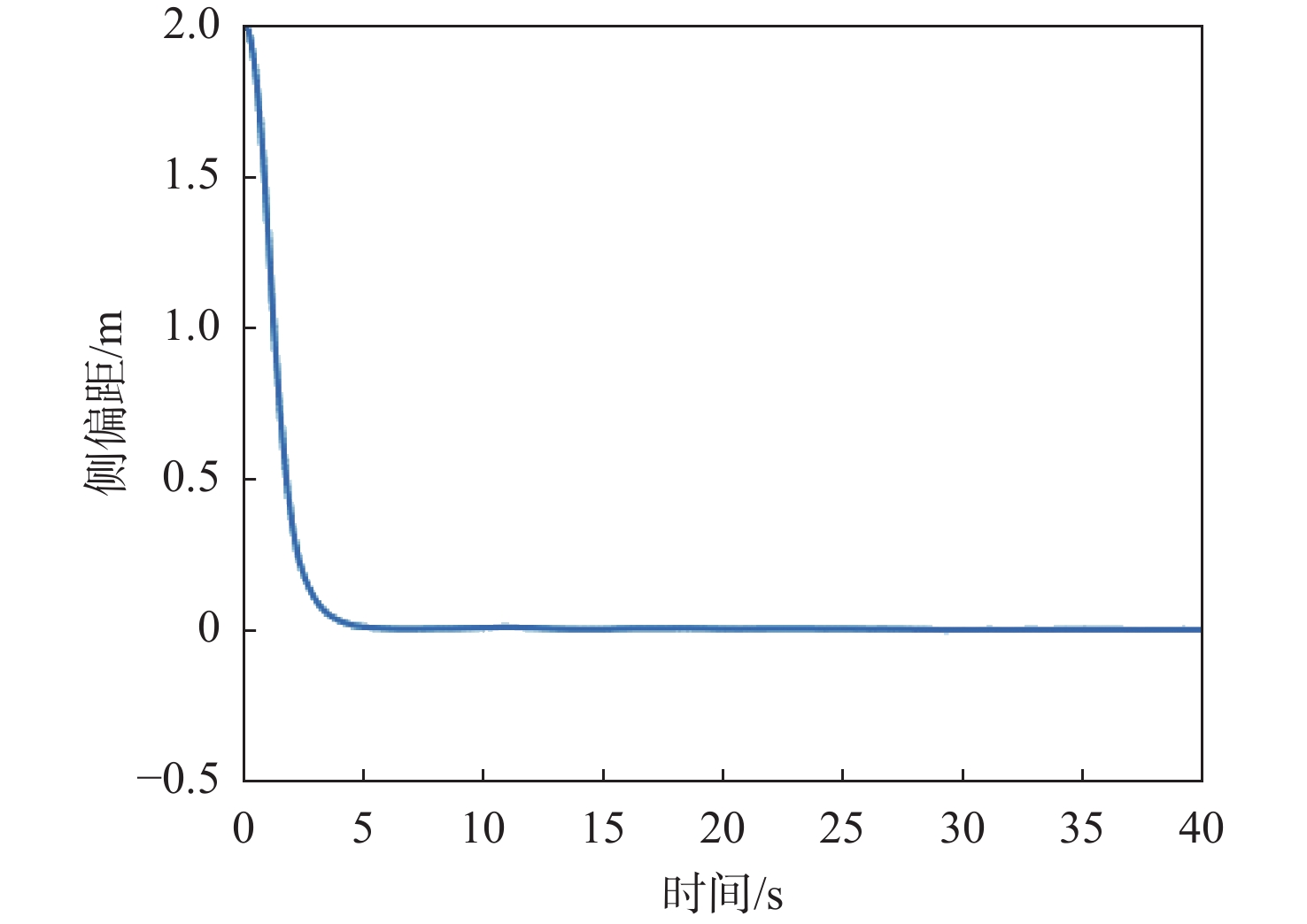
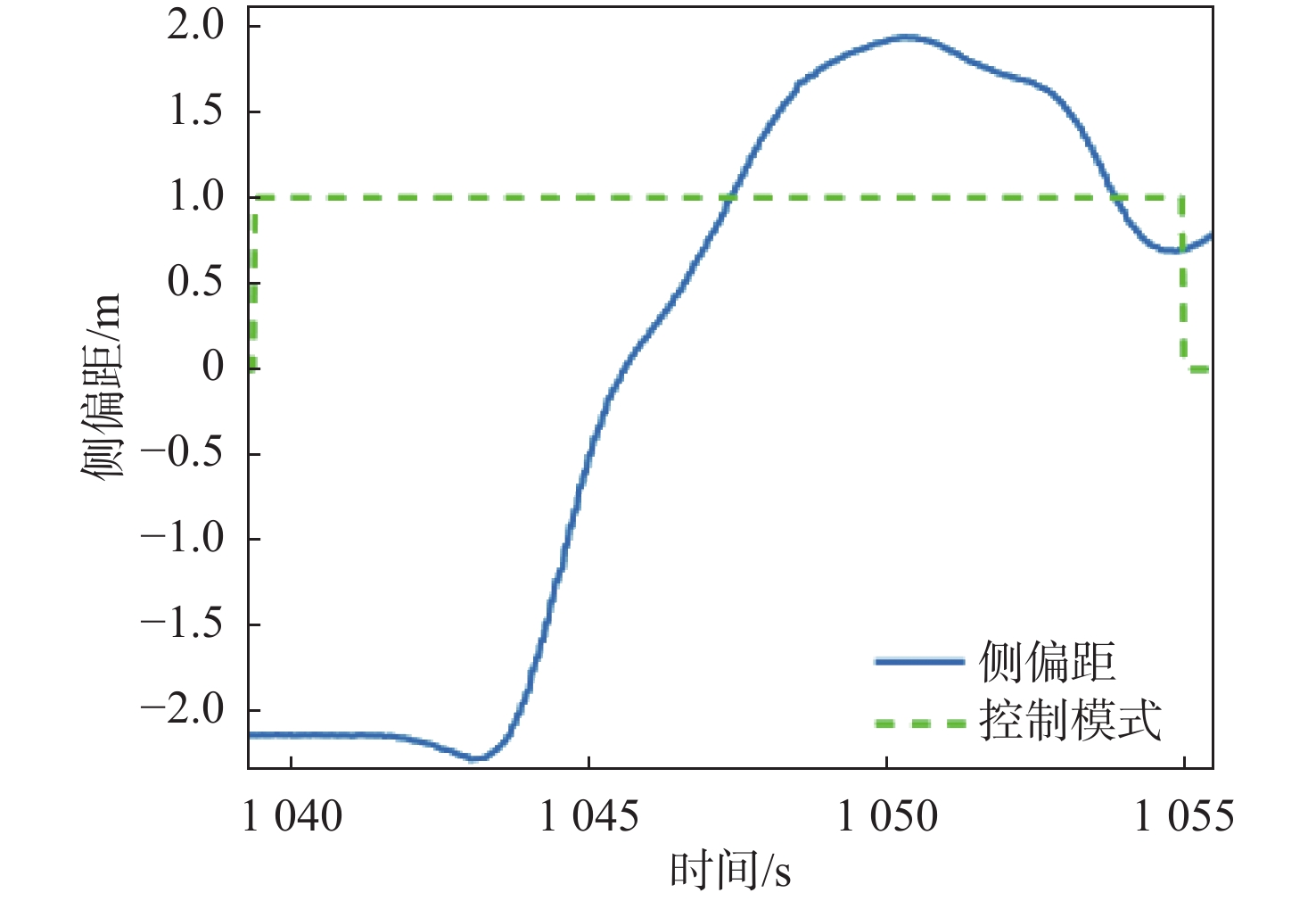
图 19 初始位置偏差情况下侧偏距试验结果
Figure 19. Side deviation test results with initial position error
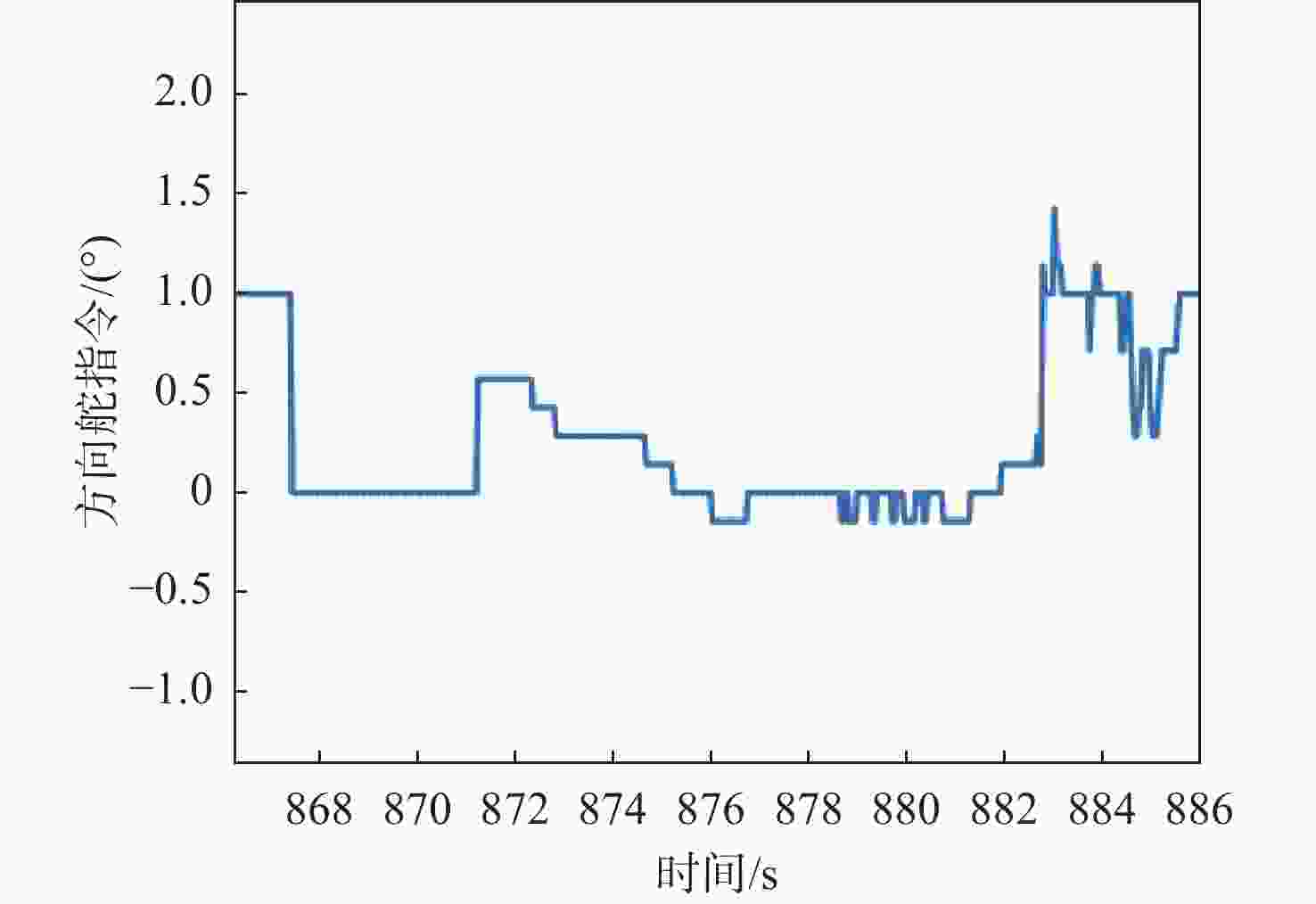
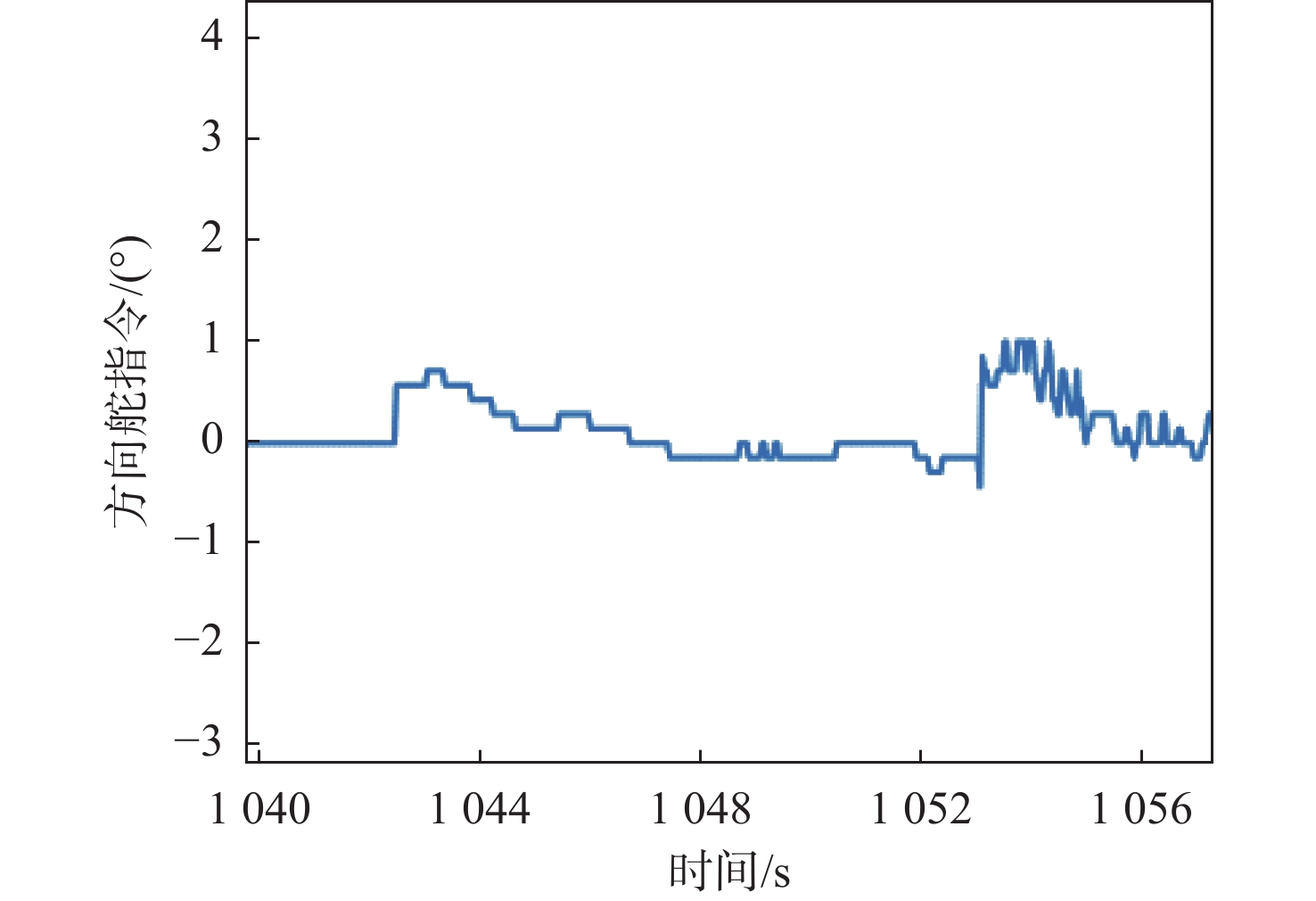
图 21 初始位置偏差情况下方向舵控制指令
Figure 21. Control command for rudder with initial position error
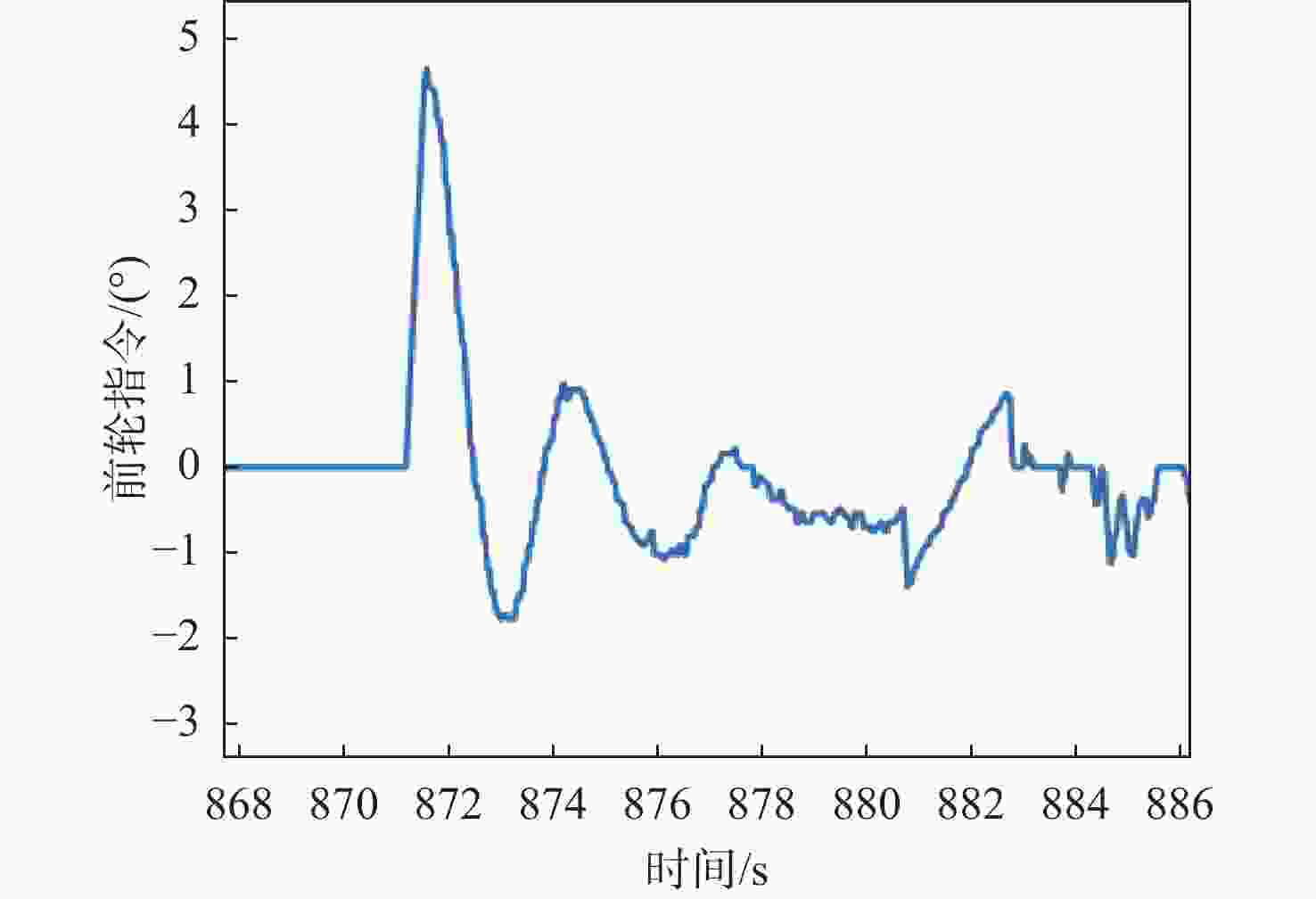
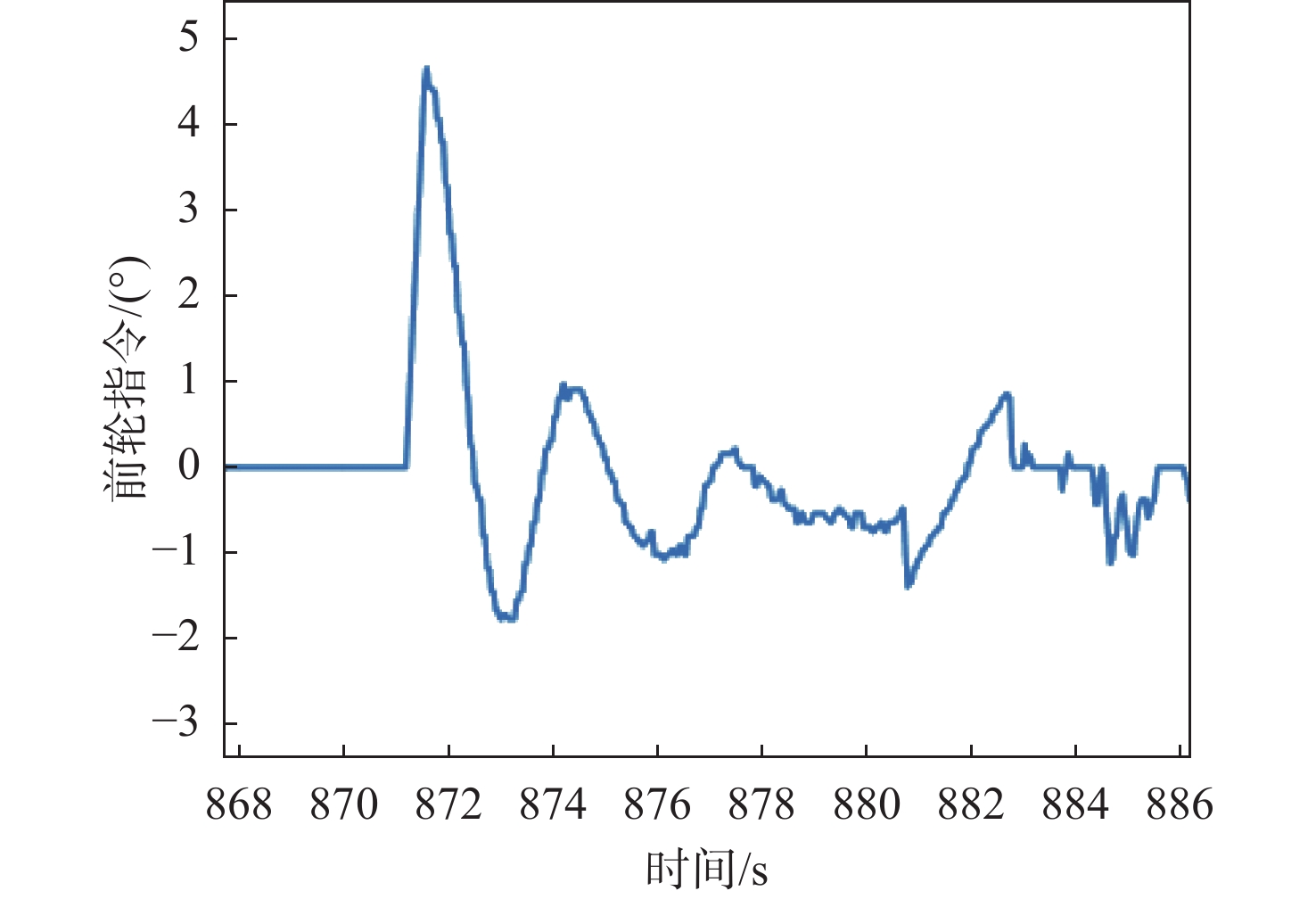
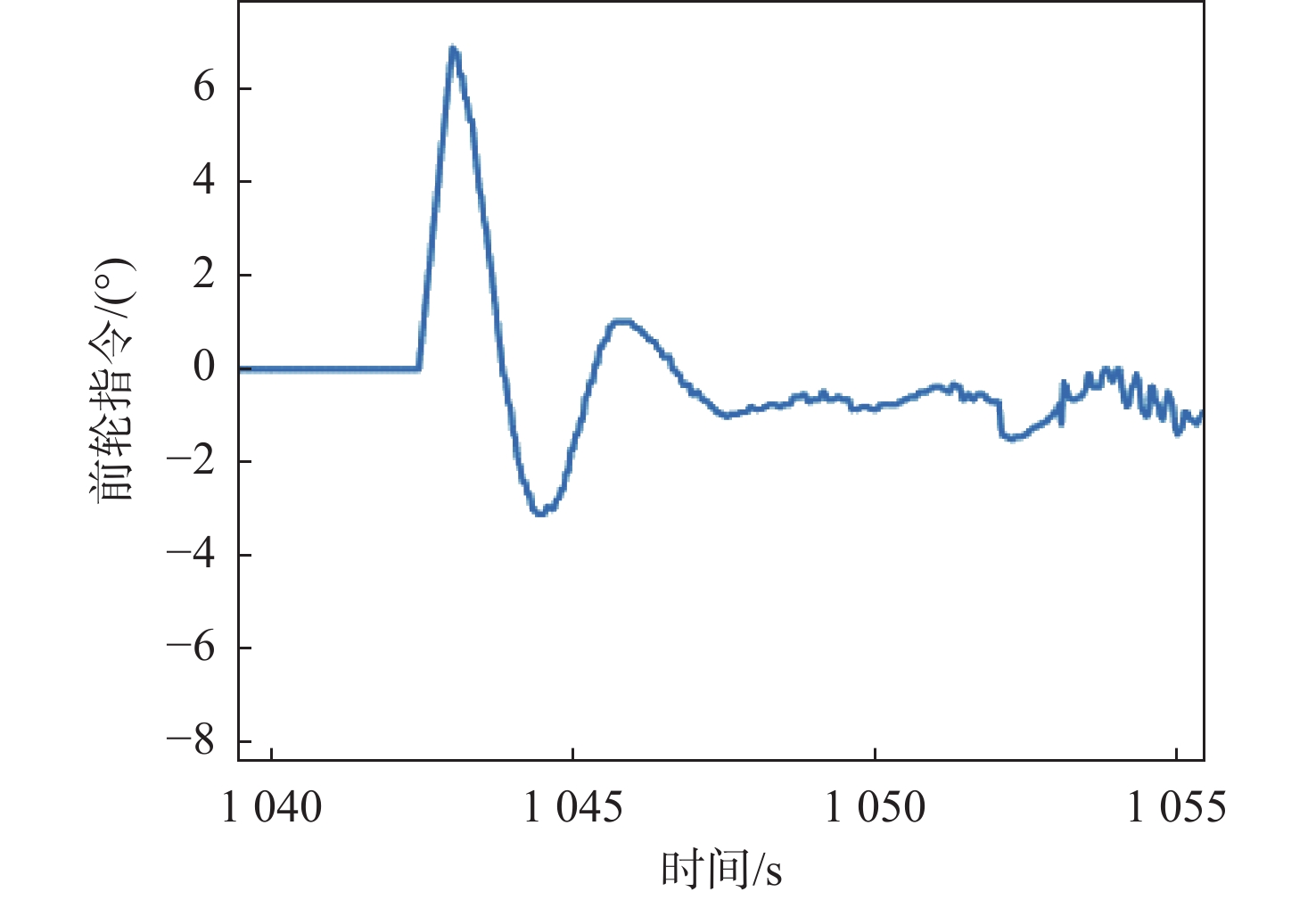
图 22 初始位置偏差情况下前轮控制指令
Figure 22. Control command for nose wheel with initial position error
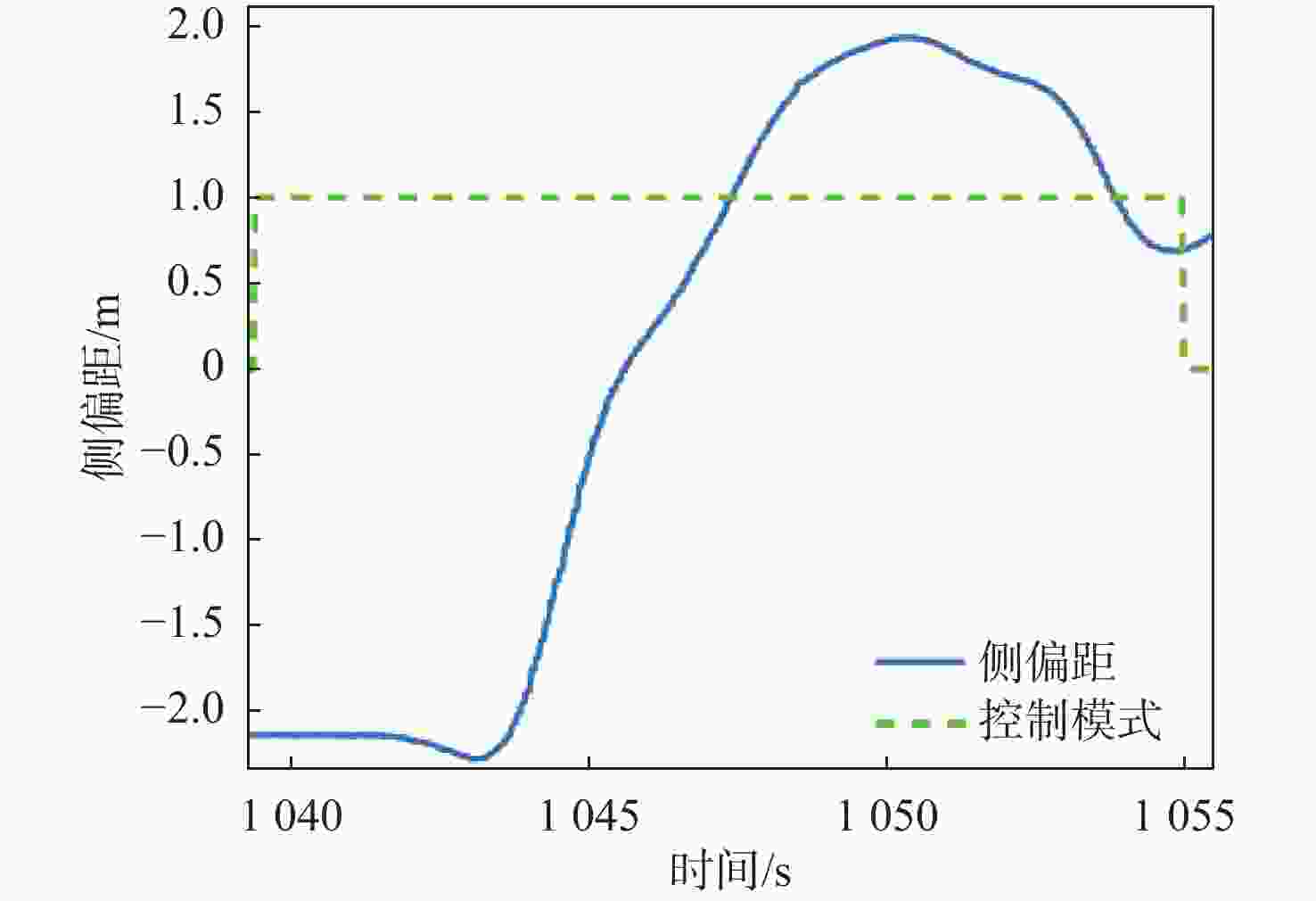
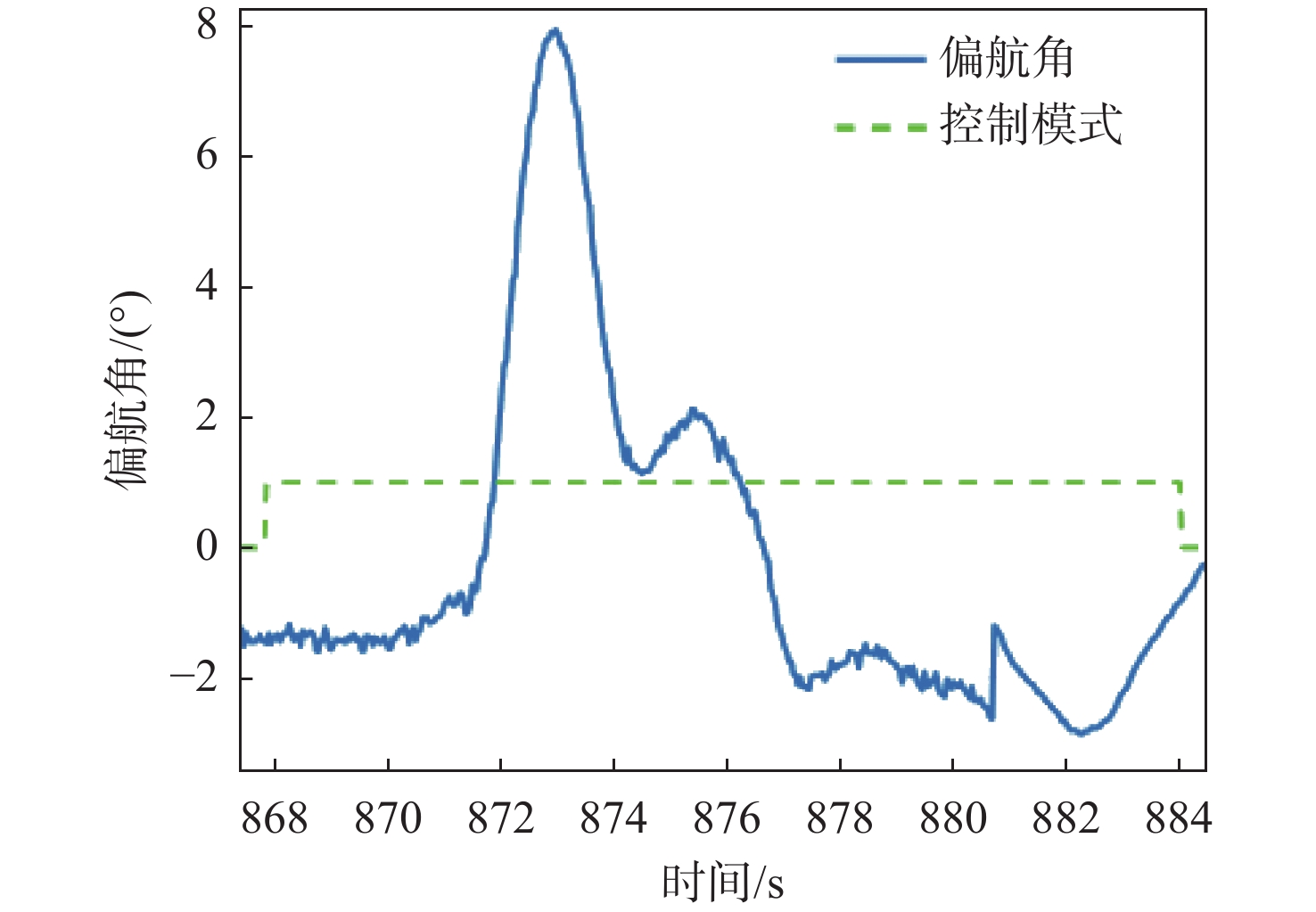
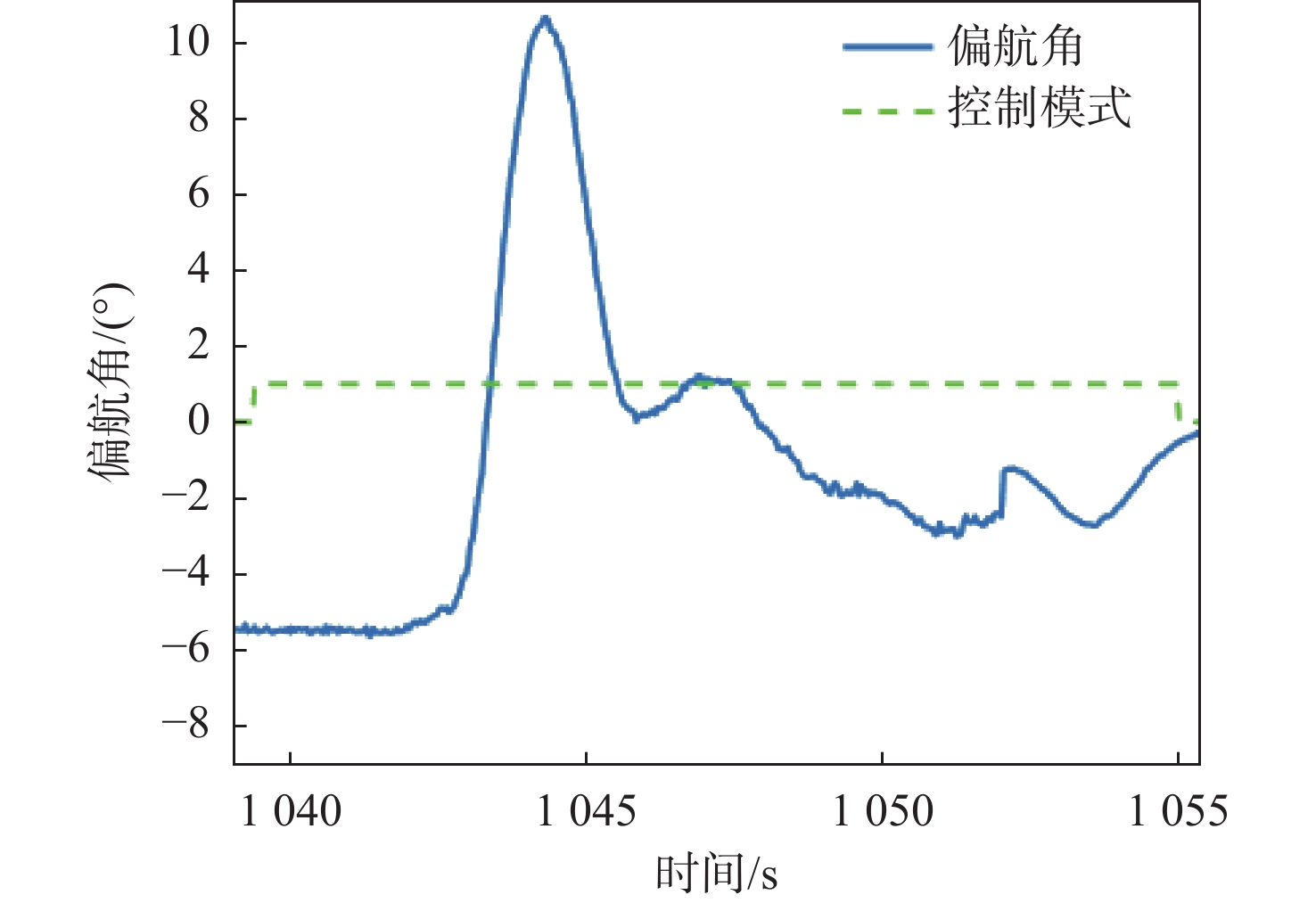
图 24 初始偏航角偏差情况下侧偏距试验结果
Figure 24. Side deviation test results with initial heading error
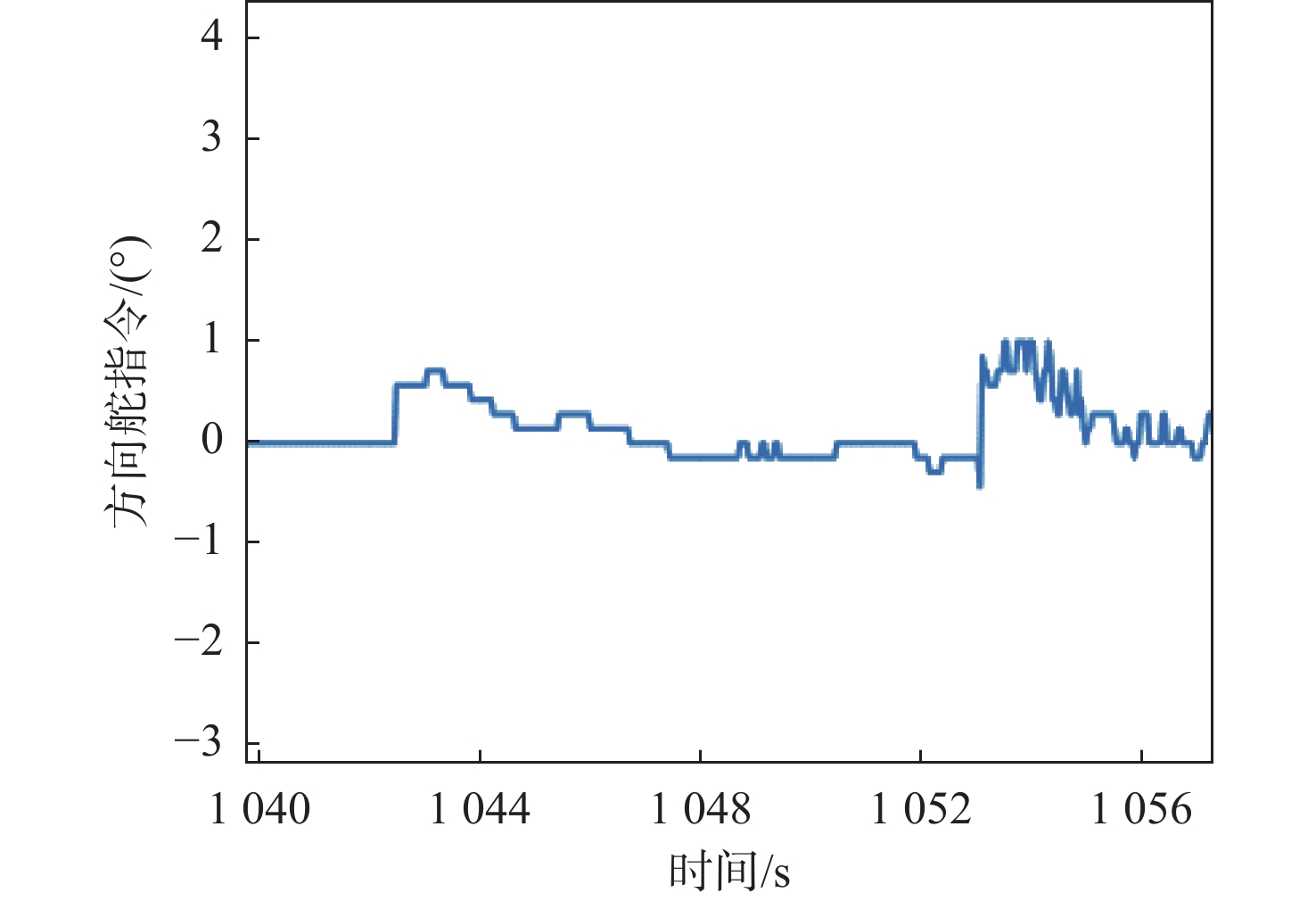
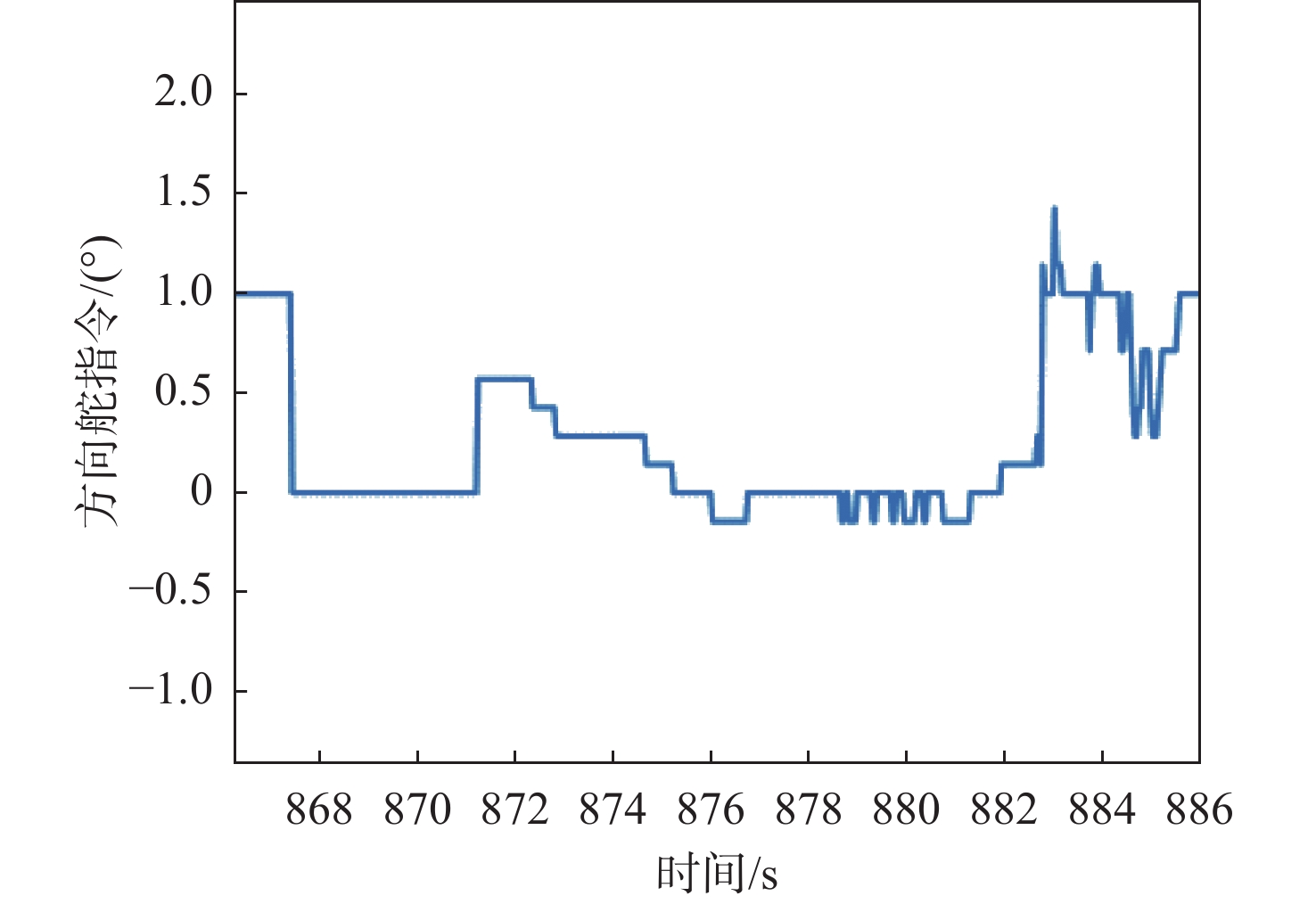
图 26 初始偏航角偏差情况下方向舵控制指令
Figure 26. Control command for rudder with initial heading error
-
[1] SON T N, DAT N T. Preview control of aircraft in ground operation[C]//Proceedings of the 5th International Conference on Control, Decision and Information Technologies. Piscataway: IEEE Press, 2018: 550-554. [2] LI X B, WEI X H, WANG Y, et al. Nonlinear tracking deviation correction control of airplanes in high-speed landing taxiing[J]. Journal of Guidance, Control, and Dynamics, 2020, 43(12): 2413-2424. doi: 10.2514/1.G005232 [3] LI X B, WANG Y, WEI X H, et al. A novel disturbance estimator-enhanced predictive control approach for landing planar movement control of amphibious airplanes[J]. IEEE Access, 2021, 9: 19281-19293. doi: 10.1109/ACCESS.2021.3053301 [4] LATIF Z, SHAHZAD A, SAMAR R, et al. Lateral parameter-varying modelling and control of a UAV on-ground[J]. IFAC-PapersOnLine, 2021, 54(8): 130-135. doi: 10.1016/j.ifacol.2021.08.592 [5] 史红伟, 蔡永恒, 李新华. 某型无人机滑跑起降纠偏控制改进分析[J]. 航空工程进展, 2021, 12(3): 102-111.SHI H W, CAI Y H, LI X H. Improvement on ground taxiing rectification control of a certain UAV[J]. Advances in Aeronautical Science and Engineering, 2021, 12(3): 102-111(in Chinese). [6] 乔定定. 无人飞行器地面滑跑纠偏复合控制与仿真[D]. 成都: 电子科技大学, 2022.QIAO D D. Compound control and simulation of ground taxiing and deviation correction of unmanned aerial vehicle[D]. Chengdu: University of Electronic Science and Technology of China, 2022(in Chinese). [7] 李洁玉. 高速水平回收无人机综合纠偏方法研究[D]. 南京: 南京航空航天大学, 2017.LI J Y. Research on lateral deviation correction control for high-speed UAV of horizontal recovery[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017(in Chinese). [8] 张祥, 李广文. 着陆滑跑地面综合控制技术研究[J]. 弹箭与制导学报, 2022, 42(1): 106-113.ZHANG X, LI G W. Research on the ground integrated control technology of taxiing[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2022, 42(1): 106-113(in Chinese). [9] WU J, ZHAO Y. Integrated control technology of large aircraft ground direction correction based on Monte Carlo[C]//Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems. London: IET, 2022: 130-135. [10] 贾彩娟. 飞翼布局无人机地面滑跑纠偏控制系统设计与仿真[J]. 自动化应用, 2018(7): 59-60. doi: 10.3969/j.issn.1674-778X.2018.07.025JIA C J. Design and simulation of deviation correction control system for UAV with flying wing layout on the ground[J]. Automation Application, 2018(7): 59-60(in Chinese). doi: 10.3969/j.issn.1674-778X.2018.07.025 [11] 王彦雄. 飞翼布局无人机起降控制技术研究[D]. 西安: 西北工业大学, 2017.WANG Y X. Take-off and landing control for flying-wing unmanned aerial vehicle[D]. Xi’an: Northwestern Polytechnical University, 2017(in Chinese). [12] SUJIT P B, SARIPALLI S, SOUSA J B. Unmanned aerial vehicle path following: a survey and analysis of algorithms for fixed-wing unmanned aerial vehicless[J]. IEEE Control Systems Magazine, 2014, 34(1): 42-59. doi: 10.1109/MCS.2013.2287568 [13] PARK S, DEYST J, HOW J. A new nonlinear guidance logic for trajectory tracking[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2004: 4900. [14] HUANG H, ZHANG H, LIU X, et al. Research on the stability of aircraft with nose wheel autonomous taxiing configuration[C]//Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems. London: IET, 2022: 267-272. [15] HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. doi: 10.1109/TIE.2008.2011621 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 186
- HTML全文浏览量: 77
- PDF下载量: 5
- 被引次数: 0
