



Neural networks-based fault-tolerant control design for unmanned helicopter with multiple actuator faults
-
摘要:
执行器故障严重威胁无人直升机的飞行安全。考虑无人直升机同时出现执行器偏置和失效等多故障问题,提出一种复合容错飞行控制算法。针对执行器偏置故障,设计非线性故障观测器对其进行实时估计;针对执行器失效故障,构造同维辅助系统并结合神经网络技术对其进行处理。采用反步法设计无人直升机的复合容错飞行控制器,并通过Lyapunov稳定性理论证明了闭环系统误差信号均有界且收敛。仿真结果表明:所提控制算法能够提高无人直升机在执行器多故障发生时的容错能力,确保其安全飞行。
Abstract:Actuator fault threatens the flight safety of the unmanned helicopter seriously. This paper suggests a composite fault-tolerant flight control algorithm for the unmanned helicopter that takes into account both the actuator bias fault and the loss of effectiveness fault at the same time. Firstly, the nonlinear fault observer is designed to estimate the unknown actuator bias fault in real time. Meanwhile, the auxiliary system method is combined with the neural network technique to deal with the loss of effectiveness of the actuator. Finally, the composite fault-tolerant controller is developed for the unmanned helicopter based on the backstepping approach, and all error signals of the closed-loop system are proved to be bounded and convergent via Lyapunov stability analysis. According to simulation results, the proposed control scheme can guarantee the unmanned helicopter's flight safety and increase its fault-tolerant capability under multiple actuator failures.
-
Key words:
- unmanned helicopter /
- neural networks /
- auxiliary system /
- fault observer /
- composite fault-tolerant
-
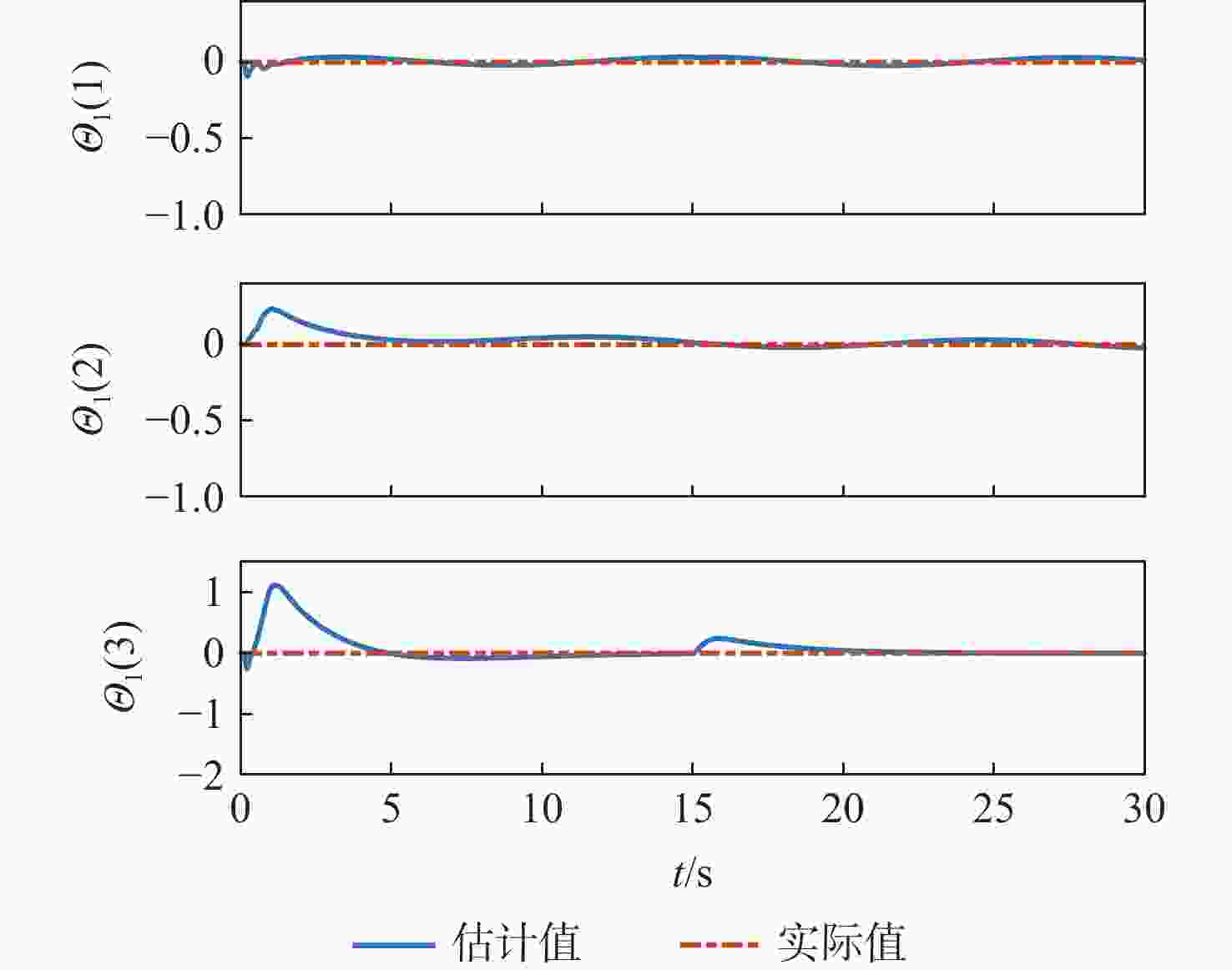
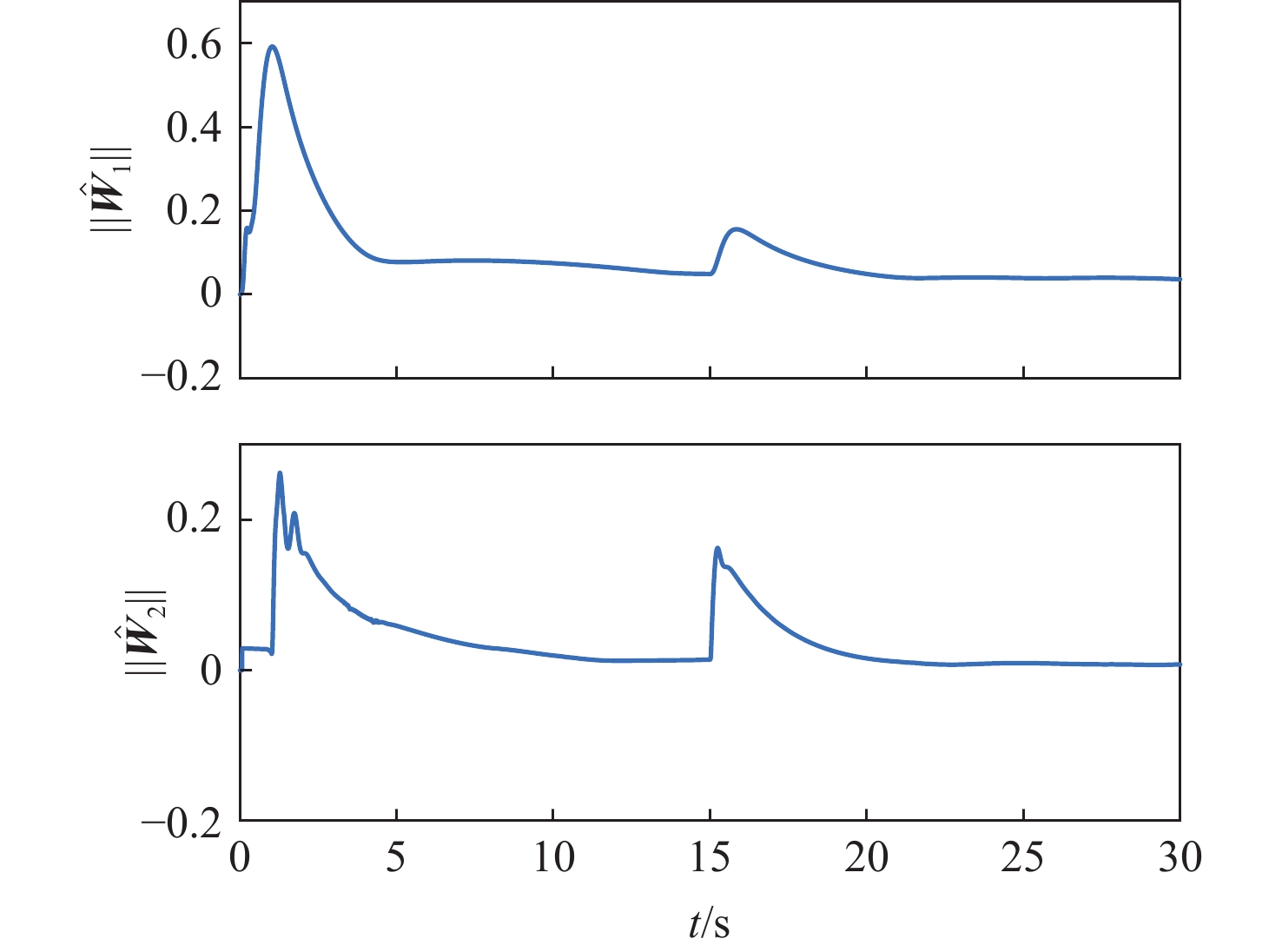
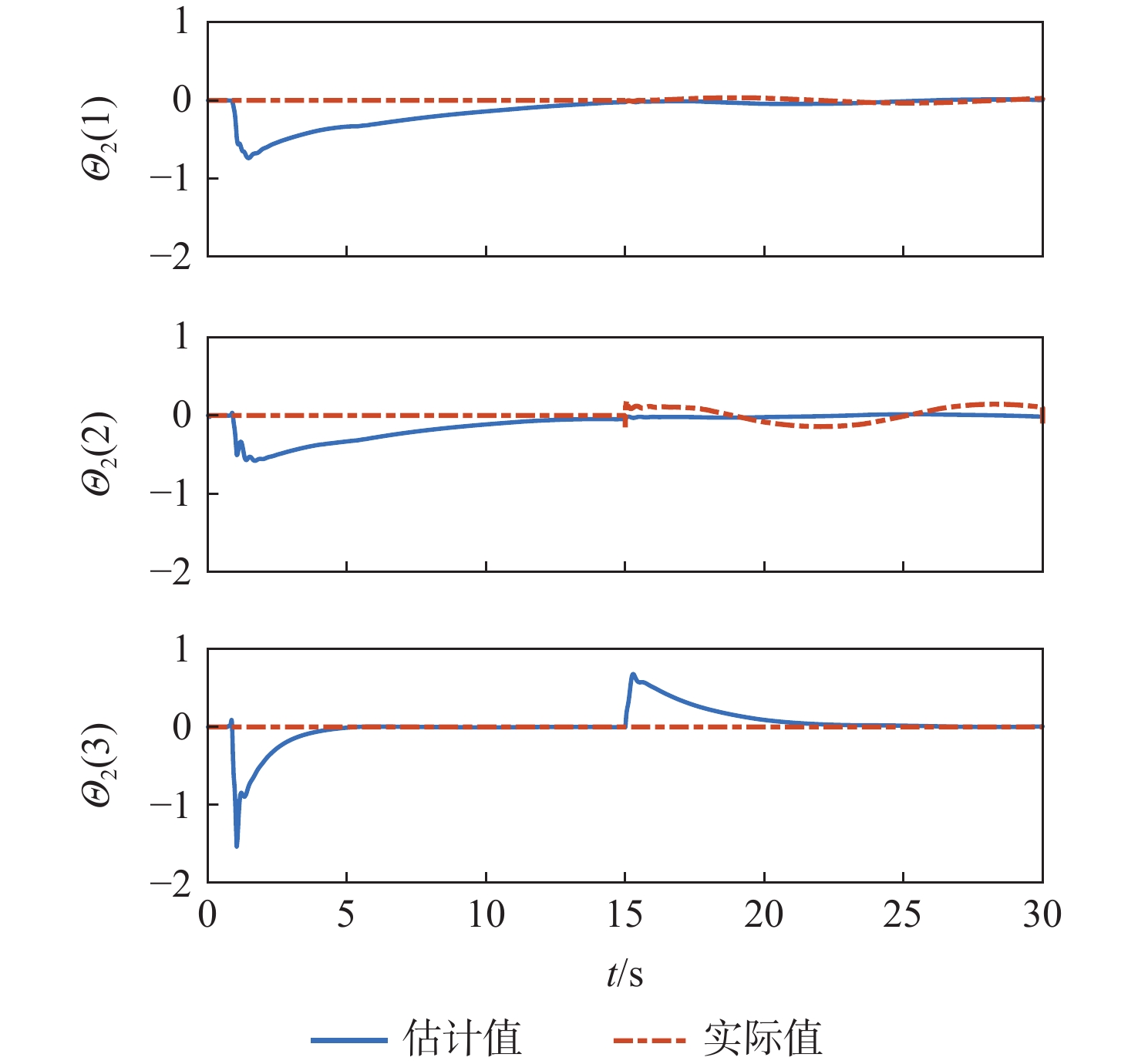
图 12 位置环RBF神经网络逼近结果
Figure 12. Position ring RBF neural networks approximation results
-
[1] 闫超, 涂良辉, 王聿豪, 等. 无人机在我国民用领域应用综述[J]. 飞行力学, 2022, 40(3): 1-6.YAN C, TU L H, WANG Y H, et al. Application of unmanned aerial vehicle in civil field in China[J]. Flight Dynamics, 2022, 40(3): 1-6(in Chinese). [2] 罗俊海, 王芝燕. 无人机探测与对抗技术发展及应用综述[J]. 控制与决策, 2022, 37(3): 530-544.LUO J H, WANG Z Y. A review of development and application of UAV detection and counter technology[J]. Control and Decision, 2022, 37(3): 530-544(in Chinese). [3] POUNDS P E I, BERSAK D R, DOLLAR A M. Stability of small-scale UAV helicopters and quadrotors with added payload mass under PID control[J]. Autonomous Robots, 2012, 33(1): 129-142. [4] LIU H, LU G, ZHONG Y S. Robust LQR attitude control of a 3-DOF laboratory helicopter for aggressive maneuvers[J]. IEEE Transactions on Industrial Electronics, 2012, 60(10): 4627-4636. [5] 李蒙, 石泳, 刘莉. 基于鲁棒H∞的无人机飞行控制系统设计及实现[J]. 北京理工大学学报, 2016, 36(8): 807-812.LI M, SHI Y, LIU L. Development of UAV autopilot based on robust H∞ theory[J]. Transactions of Beijing Institute of Technology, 2016, 36(8): 807-812(in Chinese). [6] SONG B Q, MILLS J K, LIU Y H, et al. Nonlinear dynamic modeling and control of a small-scale helicopter[J]. International Journal of Control, Automation and Systems, 2010, 8(3): 534-543. doi: 10.1007/s12555-010-0306-5 [7] DAS A, SUBBARAO K, LEWIS F. Dynamic inversion with zero-dynamics stabilisation for quadrotor control[J]. IET Control Theory & Applications, 2009, 3(3): 303-314. [8] 侯捷, 陈谋, 刘楠. 基于径向基函数神经网络与扩张状态观测器的无人直升机控制[J]. 控制理论与应用, 2021, 38(9): 1361-1371.HOU J, CHEN M, LIU N. Unmanned helicopter control based on radial basis function neural network and extended state observer[J]. Control Theory & Applications, 2021, 38(9): 1361-1371(in Chinese). [9] LIU H, WANG X F, ZHONG Y S. Robust position control of a lab helicopter under wind disturbances[J]. IET Control Theory & Applications, 2014, 8(15): 1555-1565. [10] WU B, WU J L, ZHANG J, et al. Adaptive neural control of a 2DOF helicopter with input saturation and time-varying output constraint[J]. Actuators, 2022, 11(11): 336. doi: 10.3390/act11110336 [11] YAN K, WU Q X. Adaptive tracking flight control for unmanned autonomous helicopter with full state constraints and actuator faults[J]. ISA Transactions, 2022, 128: 32-46. [12] YAN K, CHEN M, WU Q X, et al. Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts[J]. IET Control Theory & Applications, 2019, 13(10): 1500-1513. [13] 宋崎, 江紫亚, 韩建达, 等. 直升机执行器故障的双时标容错控制系统设计[J]. 控制理论与应用, 2014, 31(6): 709-716. doi: 10.7641/CTA.2014.30525SONG Q, JIANG Z Y, HAN J D, et al. Two time-scale fault tolerant control system design against actuator faults for a helicopter[J]. Control Theory & Applications, 2014, 31(6): 709-716(in Chinese). doi: 10.7641/CTA.2014.30525 [14] JIA Z Y, YU J Q, MEI Y S, et al. Integral backstepping sliding mode control for quadrotor helicopter under external uncertain disturbances[J]. Aerospace Science and Technology, 2017, 68: 299-307. doi: 10.1016/j.ast.2017.05.022 [15] 张思洁, 吴怀宇, 郑秀娟. 具有执行器故障的四旋翼无人机有限时间容错控制[J]. 控制理论与应用, 2023, 40(7): 1270-1276.ZHANG S J, WU H Y, ZHENG X J. Finite-time fault tolerant control of quadrotor UAV with actuator faults[J]. Control Theory & Applications, 2023, 40(7): 1270-1276(in Chinese). [16] 赵广磊, 高儒帅, 陈健楠. 具有执行器故障的四旋翼无人机自适应预定性能控制[J]. 控制与决策, 2021, 36(9): 2103-2112.ZHAO G L, GAO R S, CHEN J N. Adaptive prescribed performance control of quadrotor with unknown actuator fault[J]. Control and Decision, 2021, 36(9): 2103-2112(in Chinese). [17] YU X, YANG J, LI S H. Disturbance observer-based autonomous landing control of unmanned helicopters on moving shipboard[J]. Nonlinear Dynamics, 2020, 102(1): 131-150. doi: 10.1007/s11071-020-05915-w [18] CHEN M, YAN K, WU Q X. Multiapproximator-based fault-tolerant tracking control for unmanned autonomous helicopter with input saturation[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 52(9): 5710-5722. [19] WANG C C, YANG G H. Neural network-based adaptive output feedback fault-tolerant control for nonlinear systems with prescribed performance[J]. Neurocomputing, 2019, 329: 457-467. doi: 10.1016/j.neucom.2018.11.006 [20] LI D J, LU S M, LIU L. Adaptive NN cross backstepping control for nonlinear systems with partial time-varying state constraints and its applications to hyper-chaotic systems[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(5): 2821-2832. doi: 10.1109/TSMC.2019.2917056 [21] 陈海涛, 宋申民. 考虑执行器性能约束的刚体航天器鲁棒姿态跟踪控制[J]. 控制与决策, 2019, 34(4): 735-742.CHEN H T, SONG S M. Robust attitude tracking control of rigid spacecraft considering control input constraints[J]. Control and Decision, 2019, 34(4): 735-742(in Chinese). [22] 吉思臣, 王司令, 阎坤, 等. 变质心共轴双旋翼无人机建模与反步滑模控制[J]. 南京航空航天大学学报, 2022, 54(6): 1056-1064.JI S C, WANG S L, YAN K, et al. Modeling and backstepping sliding mode control of moving mass-actuated coaxial dual-rotor UAVs[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2022, 54(6): 1056-1064(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 308
- HTML全文浏览量: 111
- PDF下载量: 11
- 被引次数: 0
