



-
摘要:
双连孔力传感器在航空航天和工业计量等领域中应用广泛,但因其结构中存在变截面设计,导致其载荷位移特性和应变载荷关系较难解析描述,进而影响含双连孔结构的多维力传感器设计与性能优化。基于此,基于弹性梁理论,推导得到变截面力敏单元的柔度矩阵和应变载荷关系,进而通过柔度矩阵建模方法构建出双连孔力传感器的整体柔度模型,并以此为桥梁,获得双连孔结构上力敏单元应变片感知应变与传感器测力端作用载荷间的解析映射关系。通过有限元和实验分别对所构建的模型和应变解析关系进行验证。结果表明:期望维解析柔度相对有限元结果误差控制在3%以内,桥路输出电压理论相对于实验结果误差控制在5%以内,说明推导得到的解析公式可用于正确评价双连孔力传感器载荷位移特性和桥路输出应变与测力载荷间的映射,进而为含双连孔结构的多维力传感器优化设计提供可靠的理论技术支持。
Abstract:Double-hole force sensors are widely used in aerospace, industrial metrology and other fields, but their load-displacement characteristics and strain-load relationship are difficult to be formulated analytically due to the variable cross-section design, which will affect the design and performance optimization of multi-axis force sensors with double-hole structure. This study uses the compliance matrix modeling method to build the overall compliance model of the double-hole force sensor after determining the compliance matrix and strain-load relationship of the force-sensitive element with variable cross-section based on the elastic-beam theory. The analytical relationship between the sensed strain of the strain gauges on the force-sensitive element of the double-hole structure and the applied load acting on the force-measuring end of the sensor is finally obtained with the compliance model. The presented model and strain analytical relationship are validated by the finite element analysis and experiment, respectively. The results show that the relative errors for the expected-dimensional analytical compliances relative to finite element results are within 3%, and the bridge output voltages are within 5% compared with experimental results. These findings demonstrate that the analytical equations that were derived are capable of accurately assessing the load-displacement characteristics of double-hole force sensors as well as the mapping between applied loads and bridge output strains. They can also offer dependable technical assistance for the best possible design of multi-axis force sensors that have double-hole structures.
-
Key words:
- force sensor /
- double-hole structure /
- compliance modeling /
- strain analysis /
- calibration experiment
-
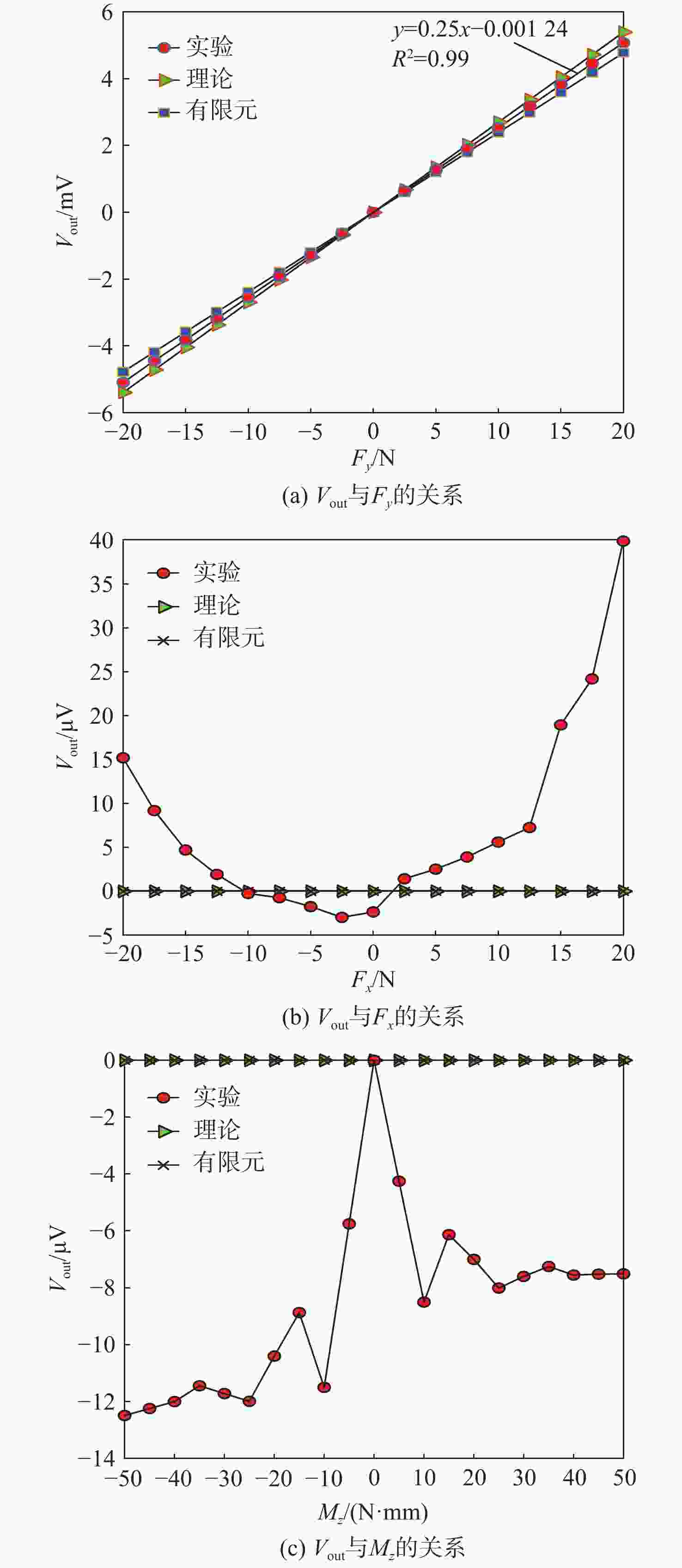
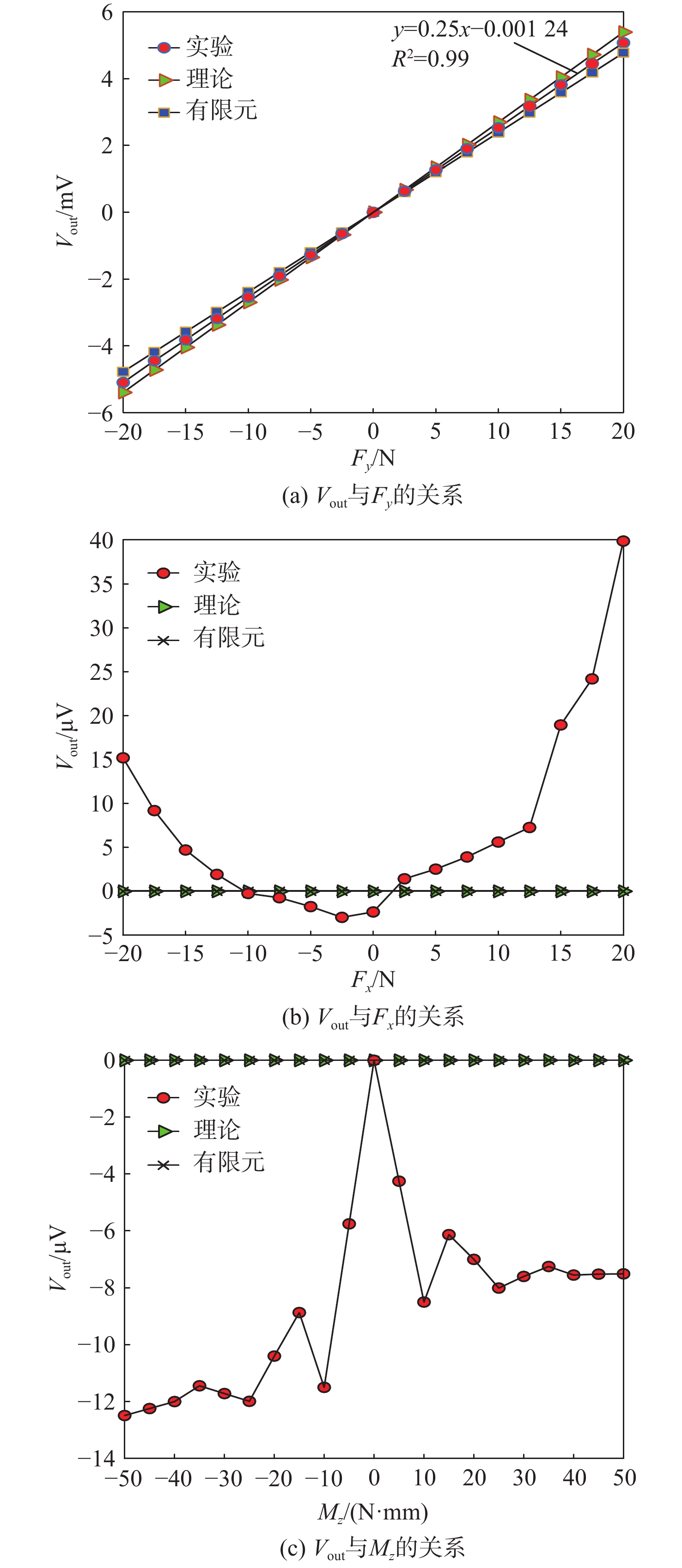
图 10 桥路输出电压与作用载荷间的关系
Figure 10. Relationships between bridge output voltage and applied loads
表 1 力传感器结构参数
Table 1. Structural parameters of force sensors
mm 算例 w r t lfs r0 lb h l 1 12 6 1 12 6 20 20 7 2 12 7 1.1 14 7 16 20 7 3 14 7 1.2 14 7 16 20 7 4 12 8 1.2 16 8 12 20 7  下载: 导出CSV
下载: 导出CSV
表 2 期望维解析柔度与有限元结果对比
Table 2. Comparison of analytical results relative to finite element results
算例 An/10−6(m·N−1) FE/10−6(m·N−1) Err/% 1 13.997 14.198 1.42 2 10.574 10.759 1.72 3 7.291 7.450 2.13 4 8.019 8.200 2.21
下载: 导出CSV
表 3 输出应变和最大等效应力结果对比
Table 3. Comparison for the output strain and the maximum equivalent stress
算例 εout σmax/MPa Fx=1 N Fy=1 N Fz=1 N Mx=1 N·mm My==1 N·mm Mz=1 N·mm Fx=1 N Fy=1 N Fz=1 N Mx=1 N·mm My==1 N·mm Mz=1 N·mm 1 2.3×10−6 −46.2 3.9×10−5 −2.5×10−6 −3.1×10−6 −4.2×10−5 8.4×10−2 4.1 1.6 6.0×10−2 3.5×10−2 7.9×10−3 2 2.5×10−7 −36.1 −3.9×10−5 1.8×10−6 9.6×10−7 −2.8×10−5 7.5×10−2 3.2 1.3 5.1×10−2 3.1×10−2 7.1×10−3 3 6.8×10−6 −26.1 1.2×10−4 2.2×10−6 −4.5×10−6 −4.8×10−5 5.8×10−2 2.3 0.9 3.5×10−2 2.1×10−2 5.5×10−3 4 −3.9×10−5 −28.4 2.9×10−5 7.7×10−8 −9.5×10−7 −1.3×10−5 6.8×10−2 2.57 1.2 4.3×10−2 2.7×10−2 6.4×10−3
下载: 导出CSV
-
[1] 于昌新, 何彦霖, 何超江, 等. 用于微创手术探针的光纤力传感器设计[J]. 光学精密工程, 2022, 30(20): 2421-2429.YU C X, HE Y L, HE C J, et al. Design of fiber force sensors for surgical probes[J]. Optics and Precision Engineering, 2022, 30(20): 2421-2429(in Chinese). [2] 胡一达, 李大寨, 杨洋, 等. 显微手术机器人末端微小型传感器集成研究[J]. 北京航空航天大学学报, 2005, 31(7): 794-798.HU Y D, LI D Z, YANG Y, et al. Integration of microsensor for microsurgery robot’s end-effector[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(7): 794-798(in Chinese). [3] 王建乐, 裘国华, 李青. 悬臂梁式电子秤全周倾斜称重技术研究[J]. 传感技术学报, 2022, 35(7): 881-887.WANG J L, QIU G H, LI Q. Research on the whole cycle tilt weighing technology of cantilever beam electronic scale[J]. Chinese Journal of Sensors and Actuators, 2022, 35(7): 881-887(in Chinese). [4] 宋文敏. 高精确度S型双连孔测力传感器[J]. 自动化仪表, 1983, 4(5): 21-24.SONG W M. High-precision S-type double-hole force sensor[J]. Process Automation Instrumentation, 1983, 4(5): 21-24(in Chinese). [5] 钟海见. XFb型过载保护式称重传感器[J]. 自动化仪表, 1990, 11(7): 16-18.ZHONG H J. XFb overload protection weighing sensor[J]. Process Automation Instrumentation, 1990, 11(7): 16-18(in Chinese). [6] 刘九卿. 平行梁型称重传感器的力学特性[J]. 衡器, 2009, 38(6): 5-7.LIU J Q. Mechanics characteristics of parallel beam load cell[J]. Weighing Instrument, 2009, 38(6): 5-7(in Chinese). [7] LOU Y J, WEI J H, SONG S. Design and optimization of a joint torque sensor for robot collision detection[J]. IEEE Sensors Journal, 2019, 19(16): 6618-6627. [8] NGUYEN D D, KUO C H. Design and optimization of a joint torque sensor for lightweight robots[J]. IEEE Sensors Journal, 2021, 21(8): 9788-9797. [9] FU B, CAI G W. Design and calibration of a joint torque sensor for robot compliance control[J]. IEEE Sensors Journal, 2021, 21(19): 21378-21389. [10] 孙玉香, 曹会彬, 汪正全, 等. 空间多维力/力矩传感器关键技术研究综述[J]. 测控技术, 2020, 39(5): 9-14.SUN Y X, CAO H B, WANG Z Q, et al. Review on key technologies of space multi-dimensional force/torque sensors[J]. Measurement & Control Technology, 2020, 39(5): 9-14(in Chinese). [11] SONG A G, FU L Y. Multi-dimensional force sensor for haptic interaction: a review[J]. Virtual Reality & Intelligent Hardware, 2019, 1(2): 121-135. [12] CAO M Y, LAWS S, BAENA F R Y. Six-axis force/torque sensors for robotics applications: a review[J]. IEEE Sensors Journal, 2021, 21(24): 27238-27251. [13] DWARAKANATH T A, BHUTANI G. Beam type hexapod structure based six component force-torque sensor[J]. Mechatronics, 2011, 21(8): 1279-1287. [14] WU B, CAI P. Decoupling analysis of a sliding structure six-axis force/torque sensor[J]. Measurement Science Review, 2013, 13(4): 187-193. [15] ZHANG Z J, CHEN Y P, ZHANG D L, et al. A six-dimensional traction force sensor used for human-robot collaboration[J]. Mechatronics, 2019, 57: 164-172. [16] MAYETIN U, KUCUK S. A low cost 3-DOF force sensing unit design for wrist rehabilitation robots[J]. Mechatronics, 2021, 78: 102623. [17] AKBARI H, KAZEROONI A. Improving the coupling errors of a Maltese cross-beams type six-axis force/moment sensor using numerical shape-optimization technique[J]. Measurement, 2018, 126: 342-355. [18] 王延深, 闫志彪. 一种柔性机构自解耦六维力传感器: CN108918013A [P]. 2018-11-30.WANG Y S, YAN Z B. A decoupling six-axis force sensor based on a flexible mechanism: CN108918013A[P]. 2018-11-30(in Chinese). [19] 路懿, 陈立伟. 刚柔混合三腿六维力传感器测力性能分析[J]. 燕山大学学报, 2014, 38(2): 127-133.LU Y, CHEN L W. Analysis of measuring performance for a parallel sensor with three rigid-compliment hybrid limb[J]. Journal of Yanshan University, 2014, 38(2): 127-133(in Chinese). [20] 张晨, 张元开, 王均. 基于串并混联柔顺机构的三维力传感器设计[J]. 仪表技术与传感器, 2019(8): 4-7.ZHANG C, ZHANG Y K, WANG J. Design of three-dimensional force sensor based on string and hybrid compliant mechanism[J]. Instrument Technique and Sensor, 2019(8): 4-7(in Chinese). [21] 王永立, 路懿. 分流式柔性铰六维力传感器刚度分析与结构优化[J]. 农业机械学报, 2019, 50(6): 419-426.WANG Y L, LU Y. Stiffness analysis and structure optimization of shunted sensor with flexure hinge[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(6): 419-426(in Chinese). [22] SHARIFZADEH M, MASOULEH M T, KALHOR A. Design, construction & calibration of a novel Human-Robot Interaction 3-DOF force sensor[C]//Proceedings of the 3rd RSI International Conference on Robotics and Mechatronics. Piscataway: IEEE Press, 2015: 182-187. [23] 王保兴, 孟刚, 林苗, 等. 3-PPP型柔性并联微定位平台的设计与分析[J]. 北京航空航天大学学报, 2020, 46(4): 798-807.WANG B X, MENG G, LIN M, et al. Design and analysis of a 3-PPP compliant parallel micro-positioning stage[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 798-807(in Chinese). [24] 于致远, 吴小霞, 王富国. 大口径主镜的六杆硬点定位机构参数优化[J]. 光学精密工程, 2023, 31(2): 200-213.YU Z Y, WU X X, WANG F G. Optimal design of parameters of the six-hardpoint positioning mechanism for large aperture primary mirror[J]. Optics and Precision Engineering, 2023, 31(2): 200-213(in Chinese). [25] 安守和, 汪满新, 李正亮. 两操作模式2-R(SS)2-R(RR)2(RR)2并联机构误差建模及精度设计[J]. 西安交通大学学报, 2020, 54(7): 146-157.AN S H, WANG M X, LI Z L. Error modeling and accuracy design of a 2-R(SS)2-R(RR)2(RR)2 parallel mechanism with two operation modes[J]. Journal of Xi’an Jiaotong University, 2020, 54(7): 146-157(in Chinese). [26] IVANOV I, CORVES B. Stiffness-oriented design of a flexure hinge-based parallel manipulator[J]. Mechanics Based Design of Structures and Machines, 2014, 42(3): 326-342. [27] 李立建, 姚建涛, 郭飞, 等. 混合型柔性铰链构型设计与柔度建模[J]. 机械工程学报, 2022, 58(21): 78-91.LI L J, YAO J T, GUO F, et al. Configuration design and compliance modeling of hybrid flexure hinges[J]. Journal of Mechanical Engineering, 2022, 58(21): 78-91(in Chinese). [28] CHEN G M, HOWELL L L. Two general solutions of torsional compliance for variable rectangular cross-section hinges in compliant mechanisms[J]. Precision Engineering, 2009, 33(3): 268-274. [29] PHAM H H, CHEN I M. Stiffness modeling of flexure parallel mechanism[J]. Precision Engineering, 2005, 29(4): 467-478. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 227
- HTML全文浏览量: 97
- PDF下载量: 8
- 被引次数: 0
