



-
摘要:
针对无人机(UAV)集群执行任务的问题,考虑无人机任务分配和航迹规划相互耦合的特性及禁飞区约束,提出一种能使无人机群以最短时间同时到达目标位置的任务规划算法。该算法通过Dubins曲线规划路径,使用引入粒子群变异的改进粒子群优化(PSO)算法对任务分配方案进行优化;采用“盘旋等待+动态速度调整”的方法同步各无人机到达目标时间;在基于无人机六自由度动力学模型和动态逆控制模型的仿真环境中对所提算法有效性进行评估验证。仿真结果表明:相比传统PSO算法,改进的PSO算法能够有效跳出局部最优,获得更优的分配方案;在所提算法的控制下,多无人机间飞行时间最大偏差仅有0.5%,满足饱和打击要求。
Abstract:This paper addresses the problem of task execution for unmanned aerial vehicles (UAV) swarms, considering the coupling characteristics of UAV task allocation and trajectory planning as well as the no-fly zone constraints. A task planning algorithm is proposed that can make the UAV swarm reach the target positions in the shortest time simultaneously. A "hovering waiting and dynamic speed adjustment" method is used to synchronize the arrival time of each UAV, Dubins curves are used to design the pathways, and an upgraded particle swarm optimization (PSO) algorithm with particle swarm mutation is used to optimize the task allocation scheme. Finally, the effectiveness of the algorithm is evaluated and verified in a simulation environment based on the six-degree-of-freedom dynamics model and the dynamic inverse control model. In contrast to the conventional PSO algorithm approach, the simulation results demonstrate that this enhanced PSO algorithm is capable of successfully escaping the local optimum and achieving a better allocation scheme. Under the control of the proposed algorithm, the maximum deviation of flight time among multiple UAVs is only 0.5%, meeting the requirements of a saturation attack.
-
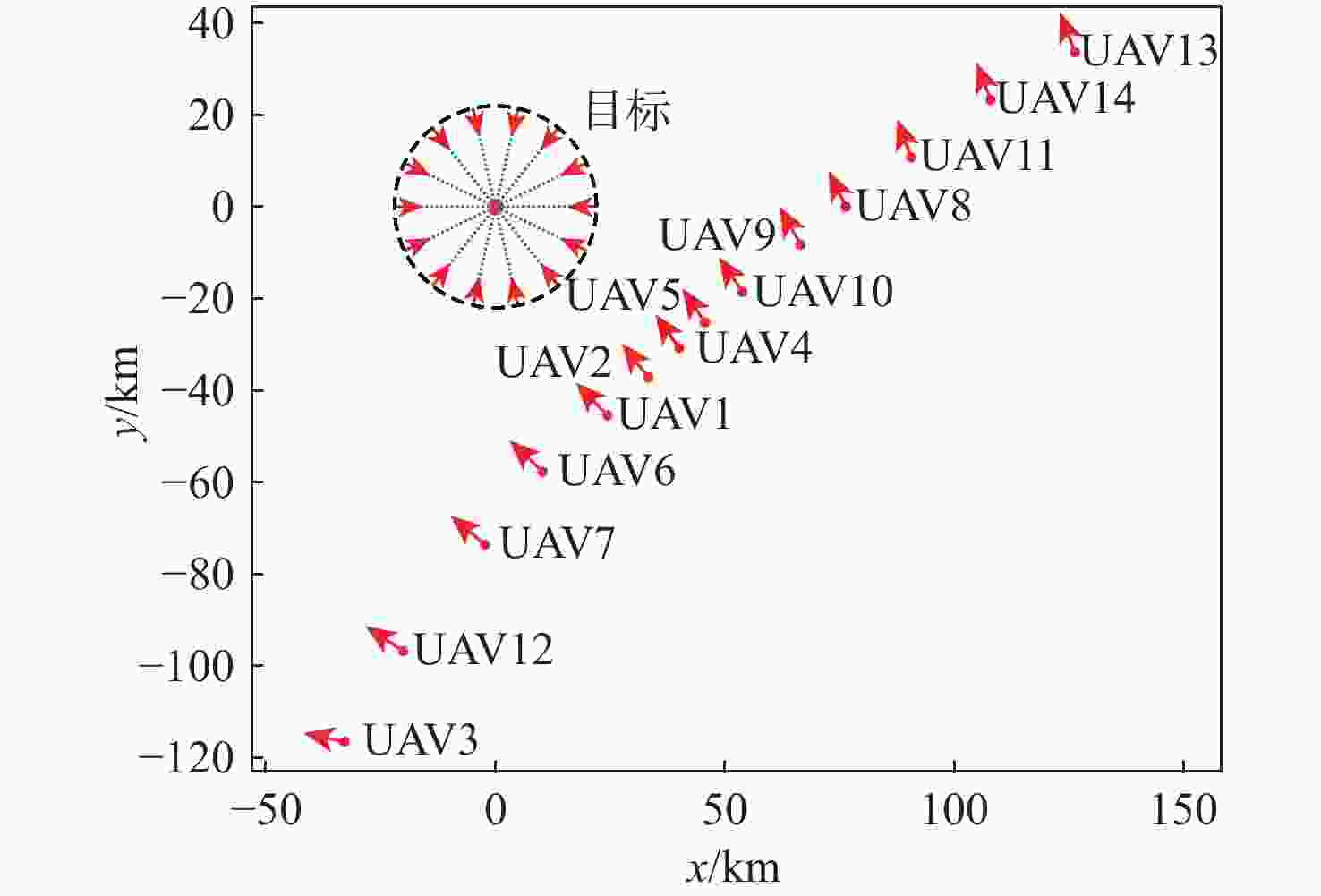
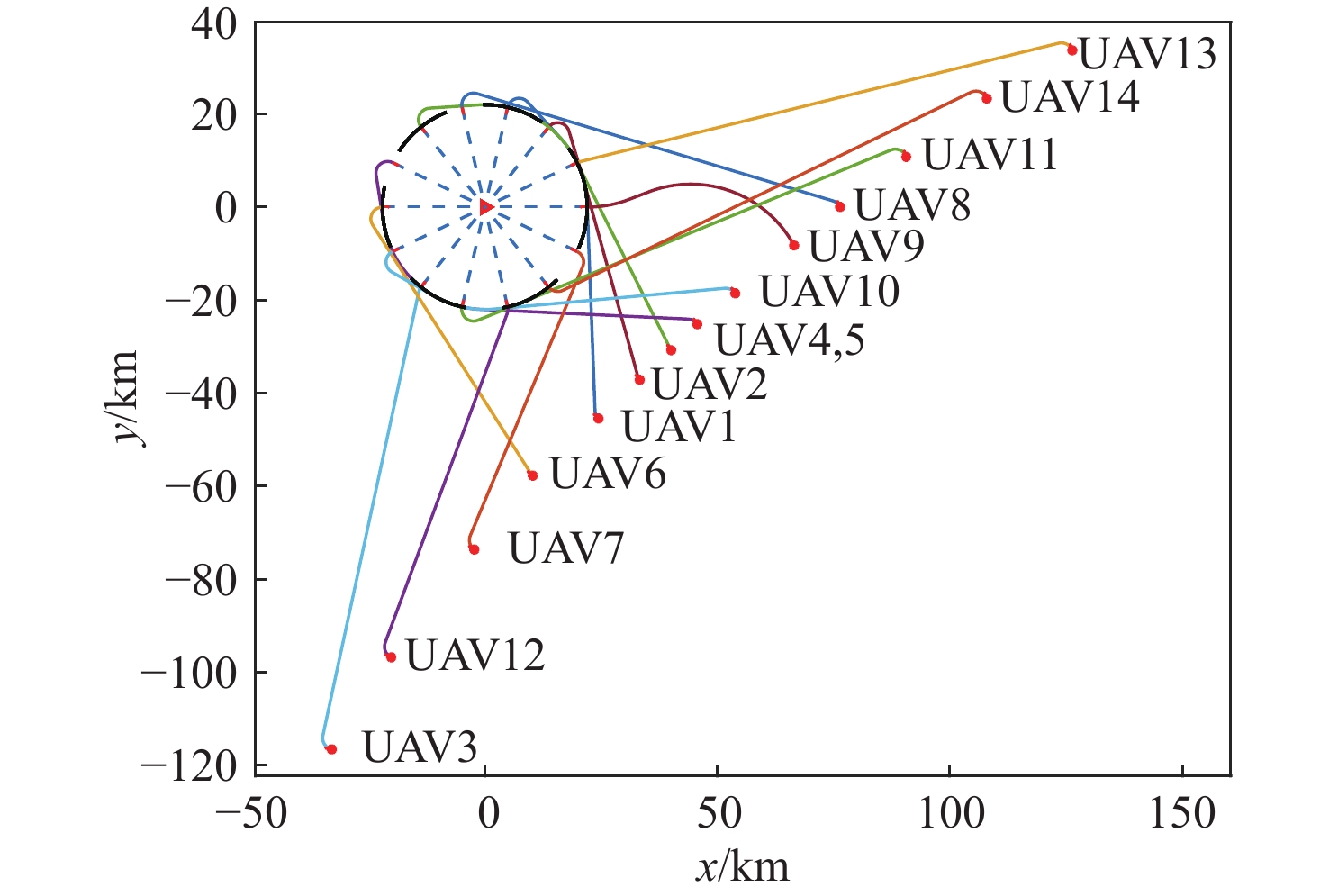
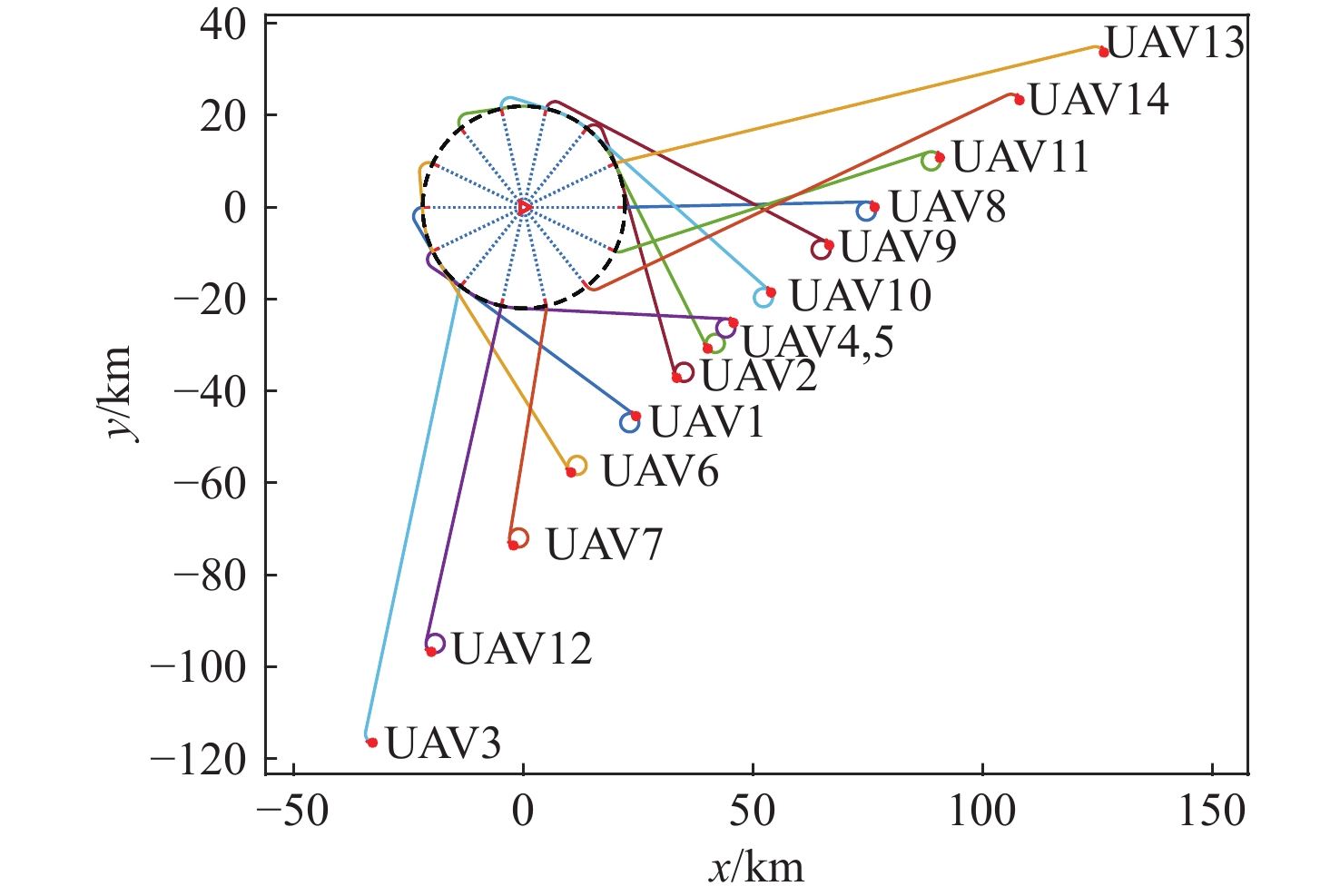
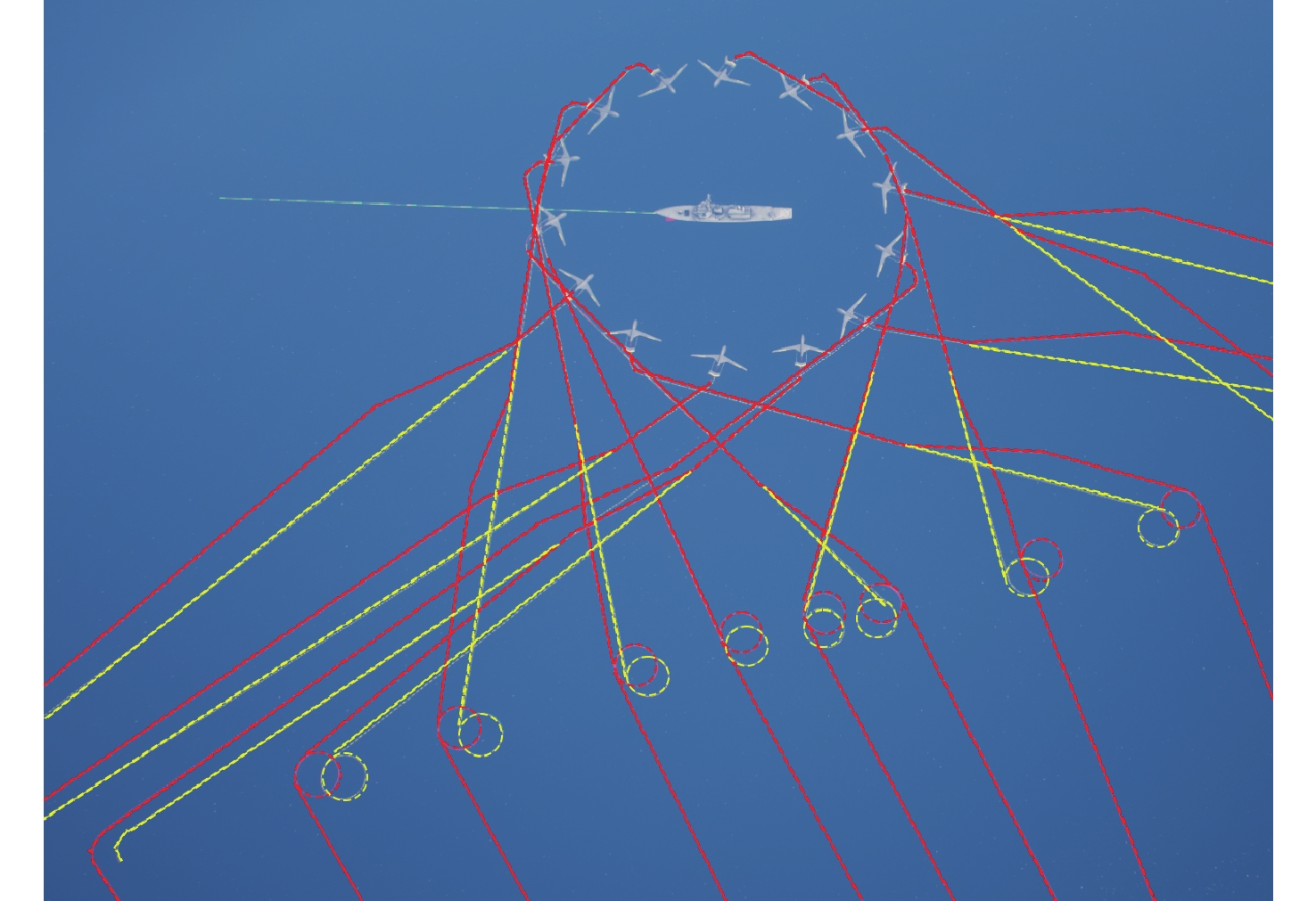
图 5 14架无人机从不同方向攻击目标集群
Figure 5. Colony with 14 UAVS attack target clusters from different directions
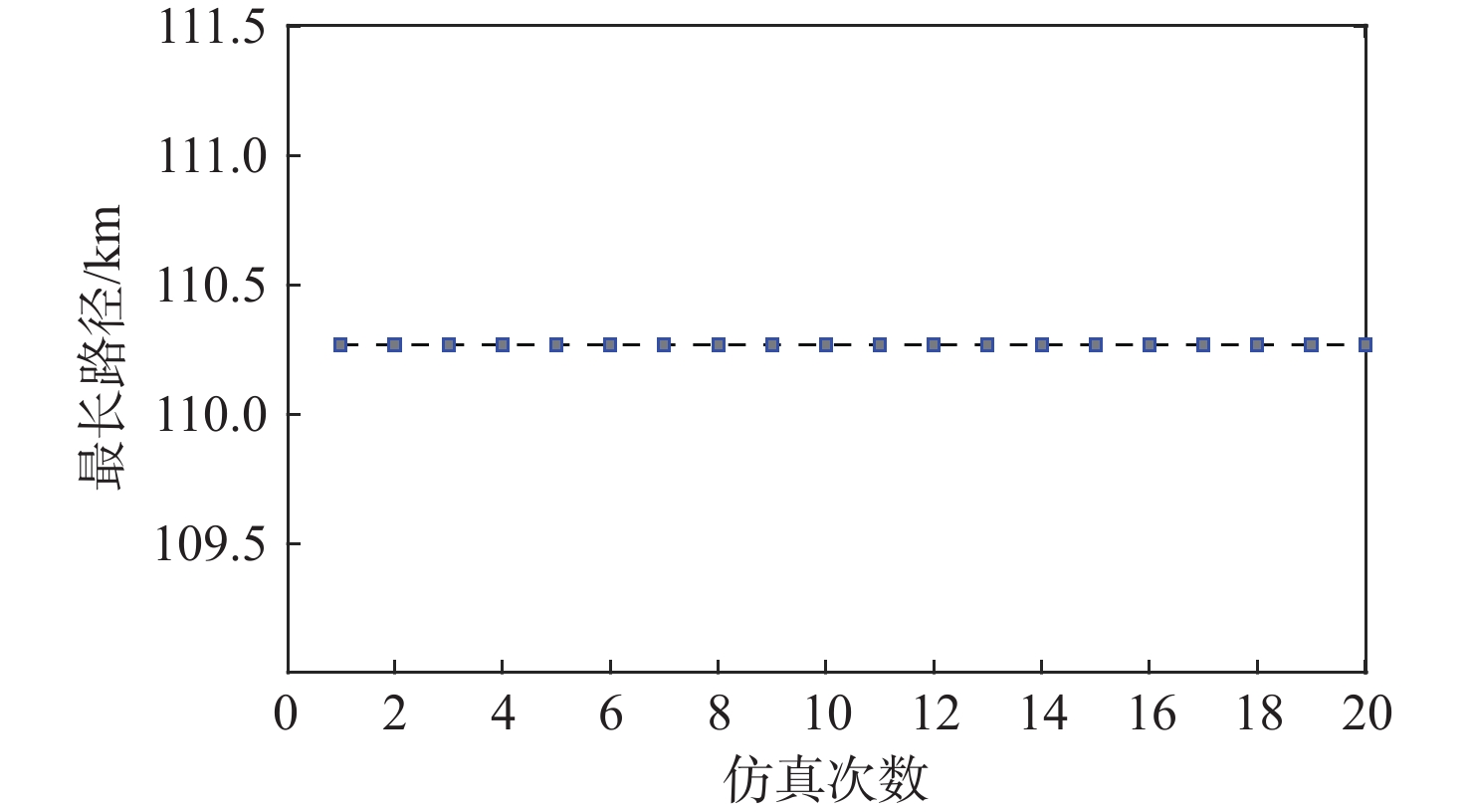
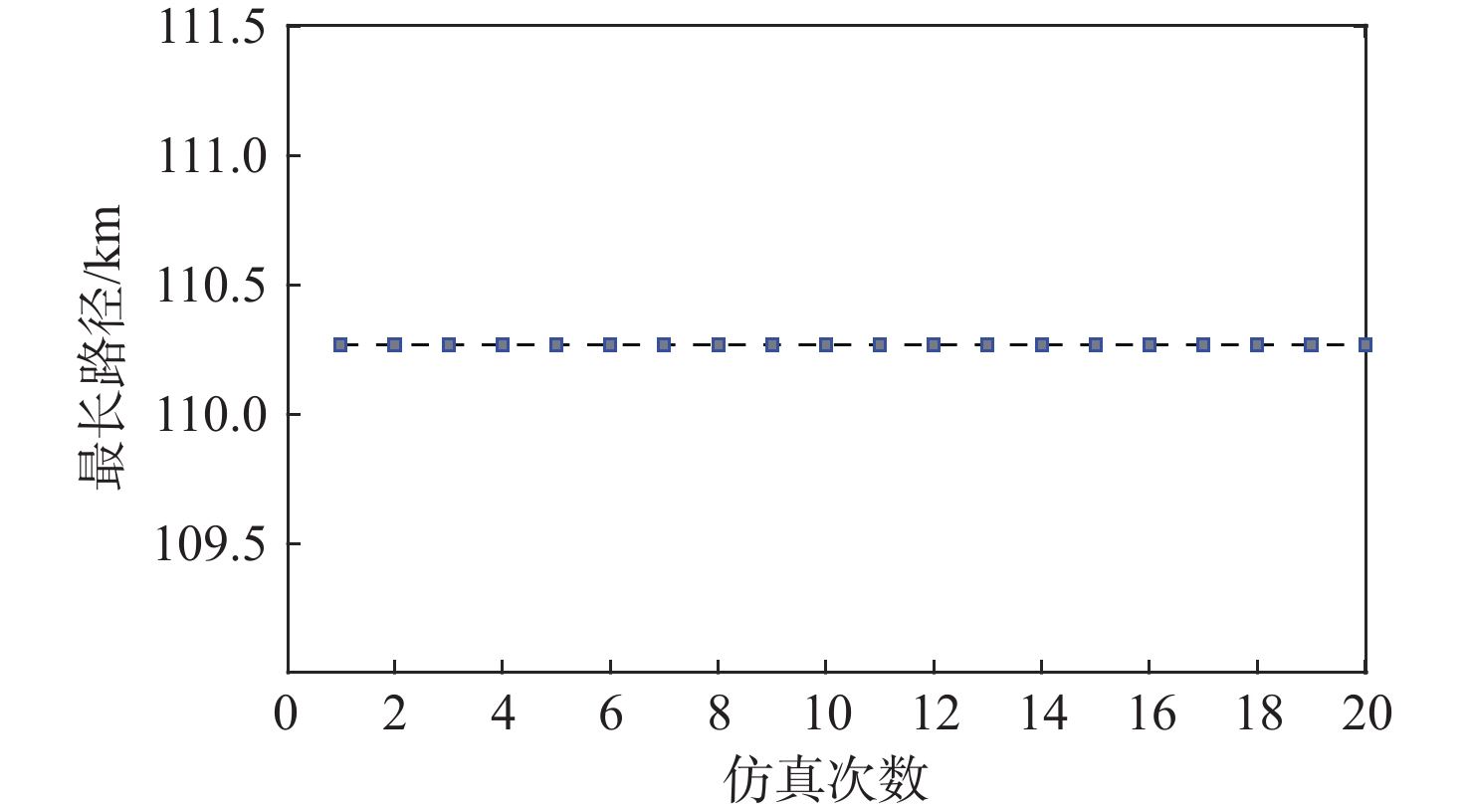
图 6 改进PSO算法20次模拟结果
Figure 6. Results from 20 iterations simulation results of improved PSO algorithm
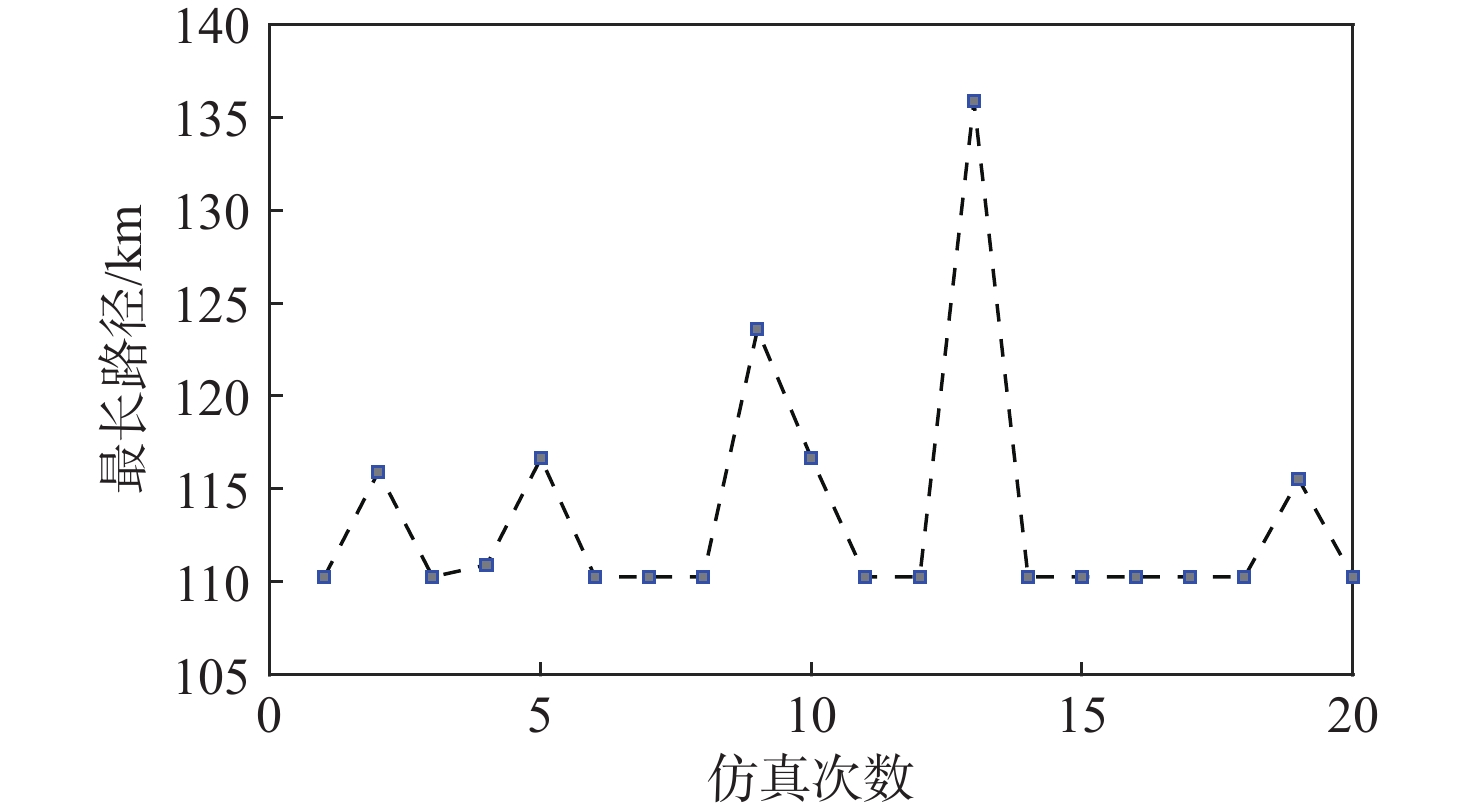
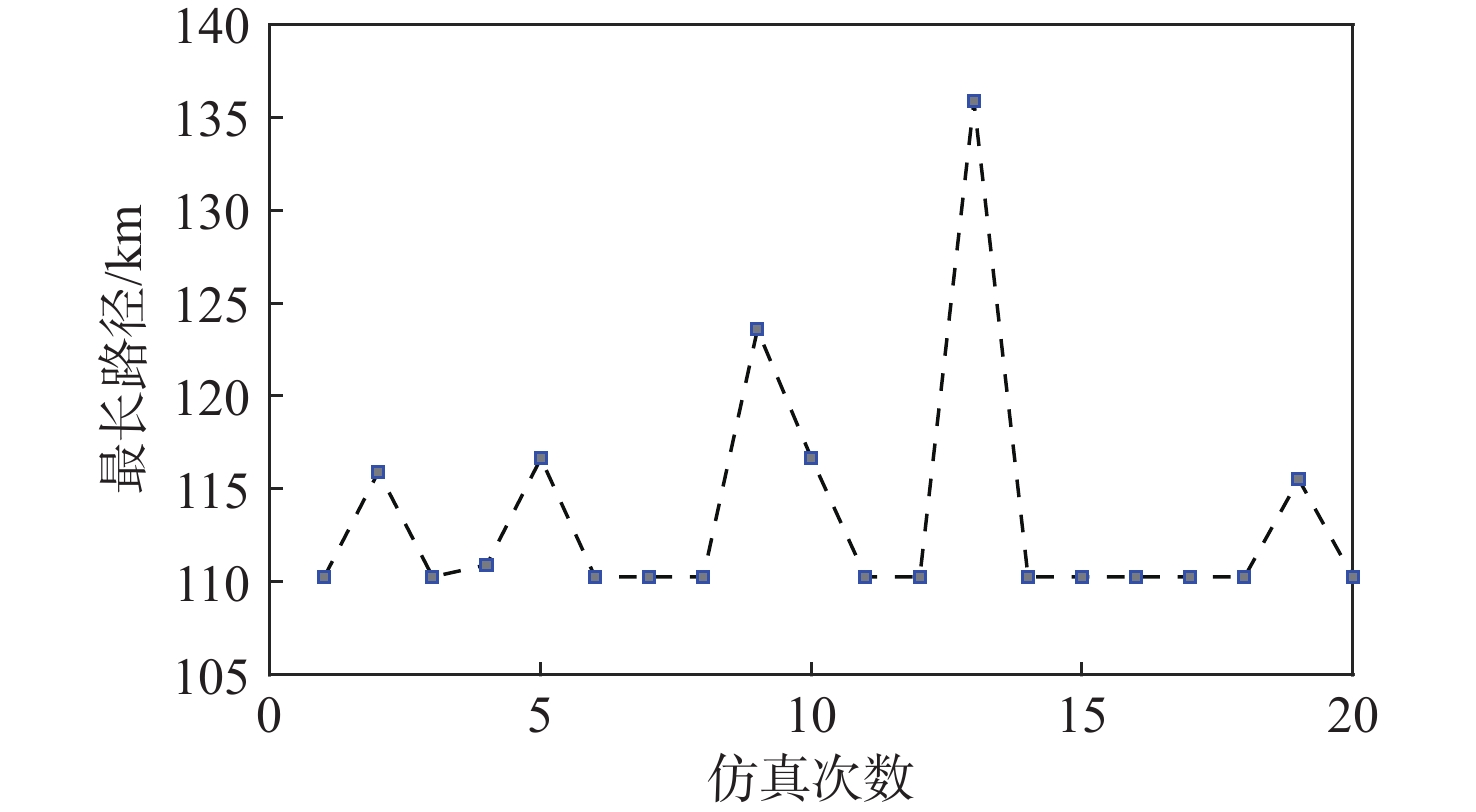
图 7 原始PSO算法20次模拟结果
Figure 7. Simulation results of original PSO algorithm after 20 iterations

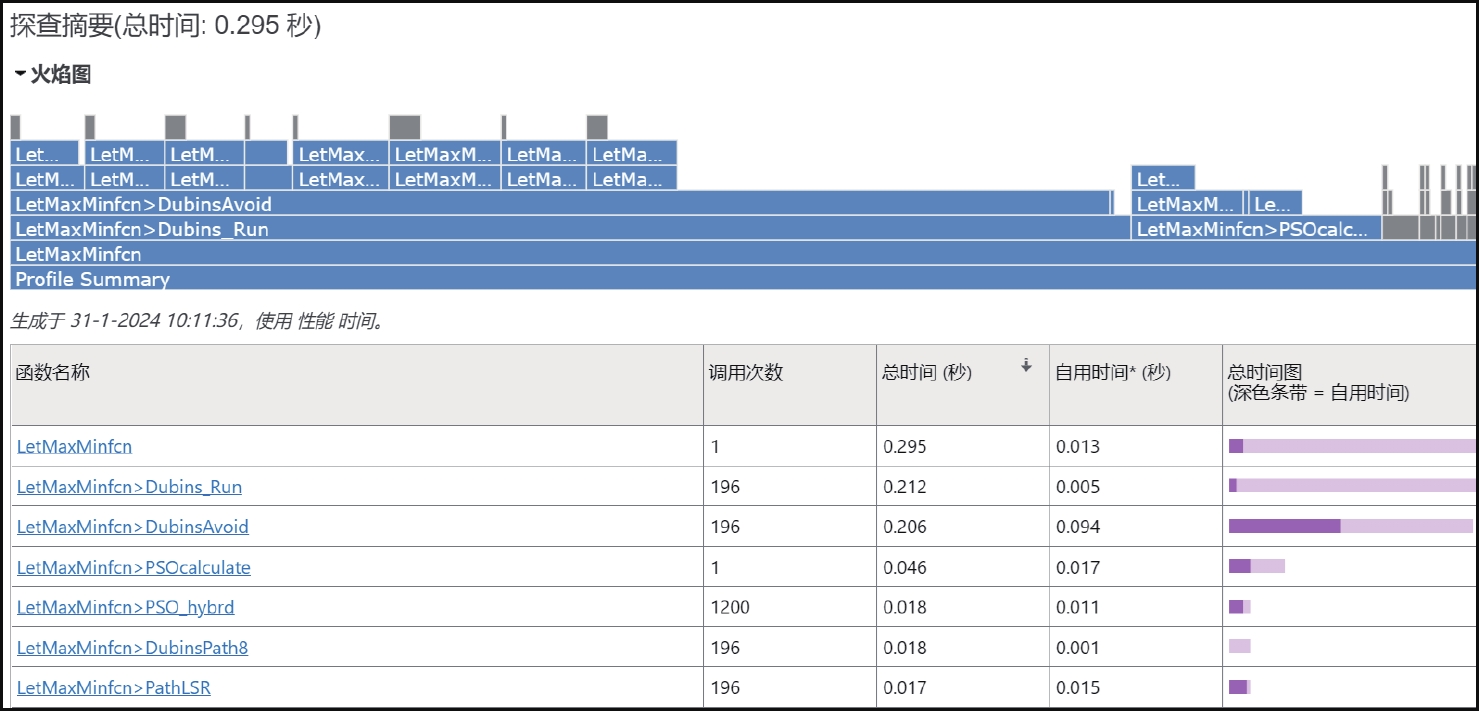
图 8 改进PSO算法计算性能分析结果
Figure 8. Improved PSO algorithm computational performance analysis results
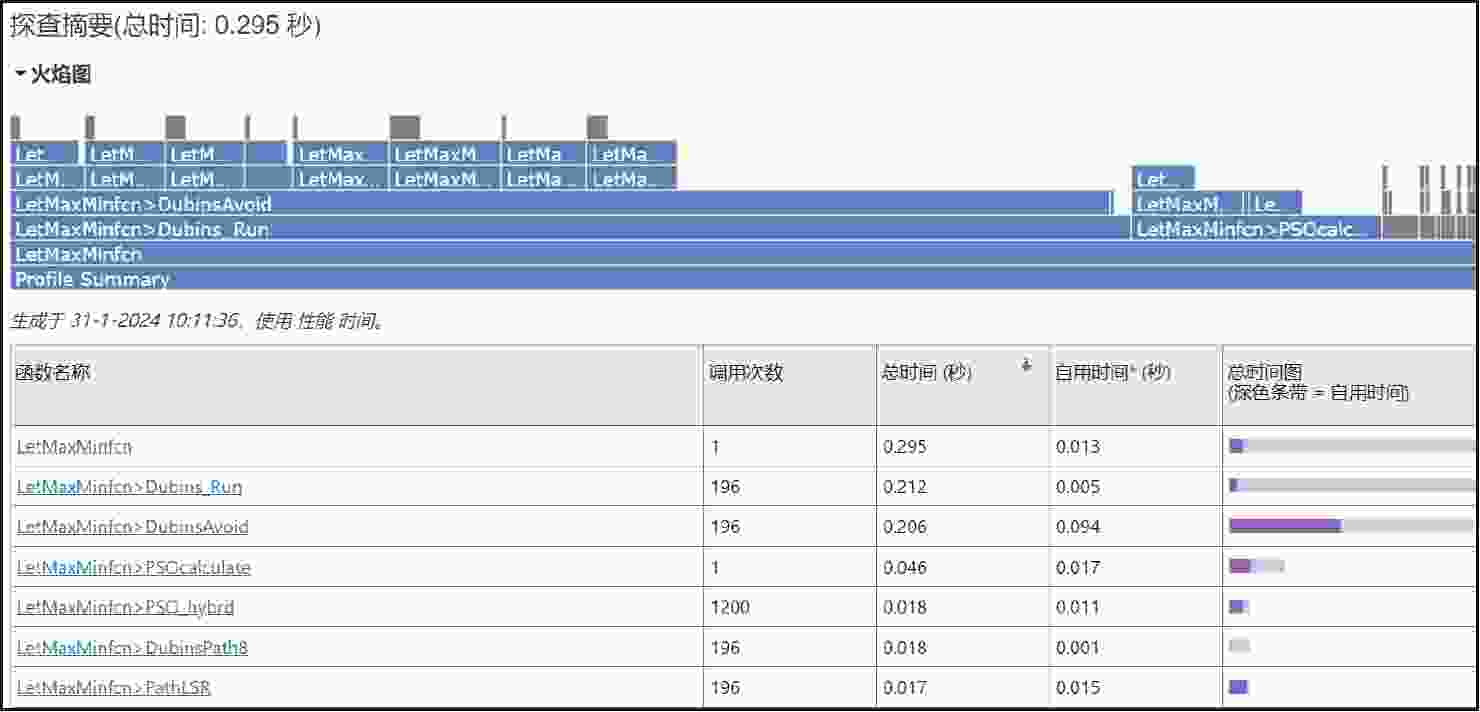
图 9 原始PSO算法计算性能分析结果
Figure 9. Original PSO algorithm computational performance analysis results
表 1 粒子特征信息矩阵P
Table 1. Particle feature information matrix P
目标 P的元素 无人机I 无人机II 无人机III 留空 目标I 0 0 1 0 目标II 1 0 0 0 目标III 0 1 0 0 目标IV 0 0 0 1  下载: 导出CSV
下载: 导出CSV
表 2 改进PSO算法的效果
Table 2. Effects of improved PSO algorithm
算法 陷入局部最优次数 进入更优平均迭代次数 改进PSO 0 3.35 原始PSO 7 2.54
下载: 导出CSV
表 3 调整前后路径长度对比
Table 3. Comparison of path length before and after adjustment
无人机
序号原始路径
长度/km增加转弯半径后路径
长度/km盘旋后路径
长度/km1 77.90070 77.90070 109.3166 2 61.08414 61.08414 108.2080 3 102.60840 102.60840 102.6084 4 87.17995 87.17995 102.8879 5 93.09158 93.09158 108.7995 6 69.29088 69.29088 100.7068 7 69.87339 69.87339 101.2893 8 87.24825 87.24825 102.9562 9 45.50841 50.05252 108.3403 10 81.65244 81.65244 97.3604 11 105.50630 105.50630 105.5063 12 80.63224 80.63224 96.3402 13 110.26840 110.26840 110.2684 14 105.00500 105.00500 105.0050
下载: 导出CSV
表 4 各无人机飞行时间
Table 4. Flight time of each UAV
无人机序号 到达时间/s 无人机序号 到达时间/s 1 2247 8 2247 2 2248 9 2244 3 2246 10 2245 4 2247 11 2240 5 2245 12 2239 6 2243 13 2239 7 2237 14 2242
下载: 导出CSV
-
[1] KIM H G, KIM H J. Backstepping-based impact time control guidance law for missiles with reduced seeker field-of-view[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(1): 82-94. doi: 10.1109/TAES.2018.2848319 [2] ZENG J, DOU L H, XIN B. A joint mid-course and terminal course cooperative guidance law for multi-missile salvo attack[J]. Chinese Journal of Aeronautics, 2018, 31(6): 1311-1326. doi: 10.1016/j.cja.2018.03.016 [3] ZHEN Z Y, XING D J, GAO C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm[J]. Aerospace Science and Technology, 2018, 76: 402-411. doi: 10.1016/j.ast.2018.01.035 [4] BEARD R W, MCLAIN T W, GOODRICH M A, et al. Coordinated target assignment and intercept for unmanned air vehicles[J]. IEEE Transactions on Robotics and Automation, 2002, 18(6): 911-922. doi: 10.1109/TRA.2002.805653 [5] 沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35(3): 593-606.SHEN L C, CHEN J, WANG N. Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 593-606(in Chinese). [6] DOBROKHODOV V. Cooperative path planning of unmanned aerial vehicles[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(5): 1601-1602. doi: 10.2514/1.54851 [7] SHIMA T, RASMUSSEN S, GROSS D. Assigning micro UAVs to task tours in an urban terrain[J]. IEEE Transactions on Control Systems Technology, 2007, 15(4): 601-612. doi: 10.1109/TCST.2007.899154 [8] 梁勇, 张友安, 雷军委. 一种基于Dubins路径的在线快速航路规划方法[J]. 系统仿真学报, 2013, 25(S1): 291-296.LIANG Y, ZHANG Y A, LEI J W. New method of online fast path planning based dubins path[J]. Journal of System Simulation, 2013, 25(S1): 291-296(in Chinese). [9] 刘流, 梁晓龙, 何吕龙, 等. 考虑速度约束的无人机Dubins路径规划[J]. 火力与指挥控制, 2018, 43(12): 50-54.LIU L, LIANG X L, HE L L, et al. Dubins path planning of UAV considering velocity constraint[J]. Fire Control & Command Control, 2018, 43(12): 50-54(in Chinese). [10] 陈清阳, 辛宏博, 王玉杰, 等. 一种多机协同打击的快速航迹规划方法[J]. 北京航空航天大学学报, 2022, 48(7): 1145-1153.CHEN Q Y, XIN H B, WANG Y J, et al. A rapid path planning method for multiple UAVs to cooperative strike[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1145-1153(in Chinese). [11] 王红勇, 郭宇鹏. 终端区离场航空器自主路径规划[J]. 北京航空航天大学学报, 2025, 51(2): 446-456.WANG H Y, GUO Y P. Autonomous path planning of departing aircraft in terminal area[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(2): 446-456(in Chinese). [12] 韩维, 司维超, 丁大春, 等. 基于聚类PSO算法的舰载机舰面多路径动态规划[J]. 北京航空航天大学学报, 2013, 39(5): 610-614.HAN W, SI W C, DING D C, et al. Multi-routes dynamic planning on deck of carrier plane based on clustering PSO[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(5): 610-614(in Chinese). [13] 严飞, 祝小平, 周洲, 等. 考虑同时攻击约束的多异构无人机实时任务分配[J]. 中国科学: 信息科学, 2019, 49(5): 555-569. doi: 10.1360/N112018-00338YAN F, ZHU X P, ZHOU Z, et al. Real-time task allocation for a heterogeneous multi-UAV simultaneous attack[J]. Scientia Sinica (Informationis), 2019, 49(5): 555-569(in Chinese). doi: 10.1360/N112018-00338 [14] 蒋硕, 袁小平. 改进PSO算法在多无人机协同任务分配中的应用[J]. 计算机应用研究, 2019, 36(11): 3344-3347.JIANG S, YUAN X P. Application of improved PSO algorithm in multi UAV cooperative task allocation[J]. Application Research of Computers, 2019, 36(11): 3344-3347(in Chinese). [15] BARSKY B A, DEROSE T D. Geometric continuity of parametric curves: three equivalent characterizations[J]. IEEE Computer Graphics and Applications, 1989, 9(6): 60-69. doi: 10.1109/38.41470 [16] SHANMUGAVEL M. Path planning of multiple autonomous vehicles[D]. Cranfield: Cranfield University, 2007. [17] 丁海利, 王芳, 高成修. 旅行商问题的交叉粒子群优化算法[J]. 数学杂志, 2008, 28(1): 85-89.DING H L, WANG F, GAO C X. Crossover particle swarm optimization for traveling salesman problem[J]. Journal of Mathematics, 2008, 28(1): 85-89(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 532
- HTML全文浏览量: 121
- PDF下载量: 5
- 被引次数: 0
