



-
摘要:
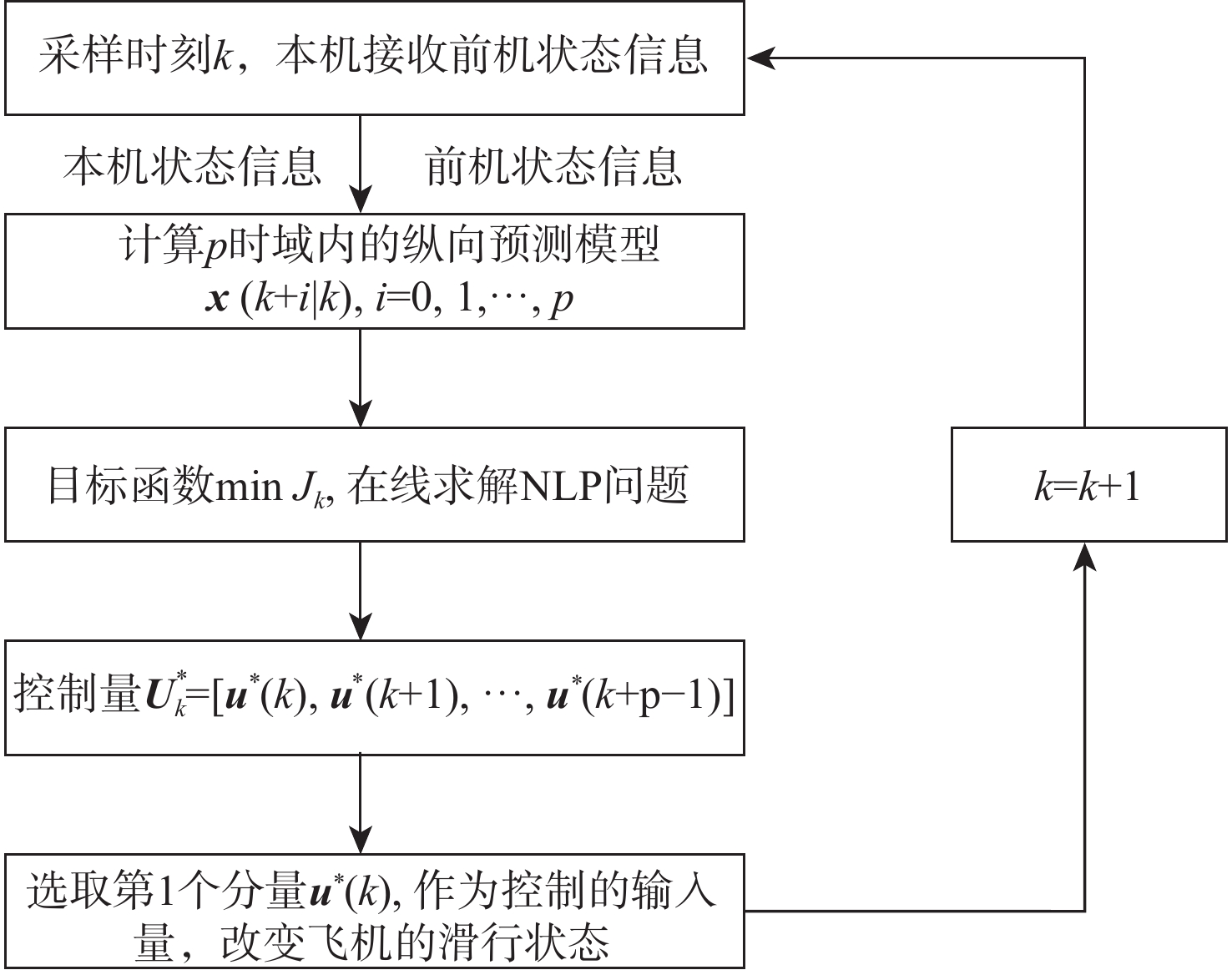
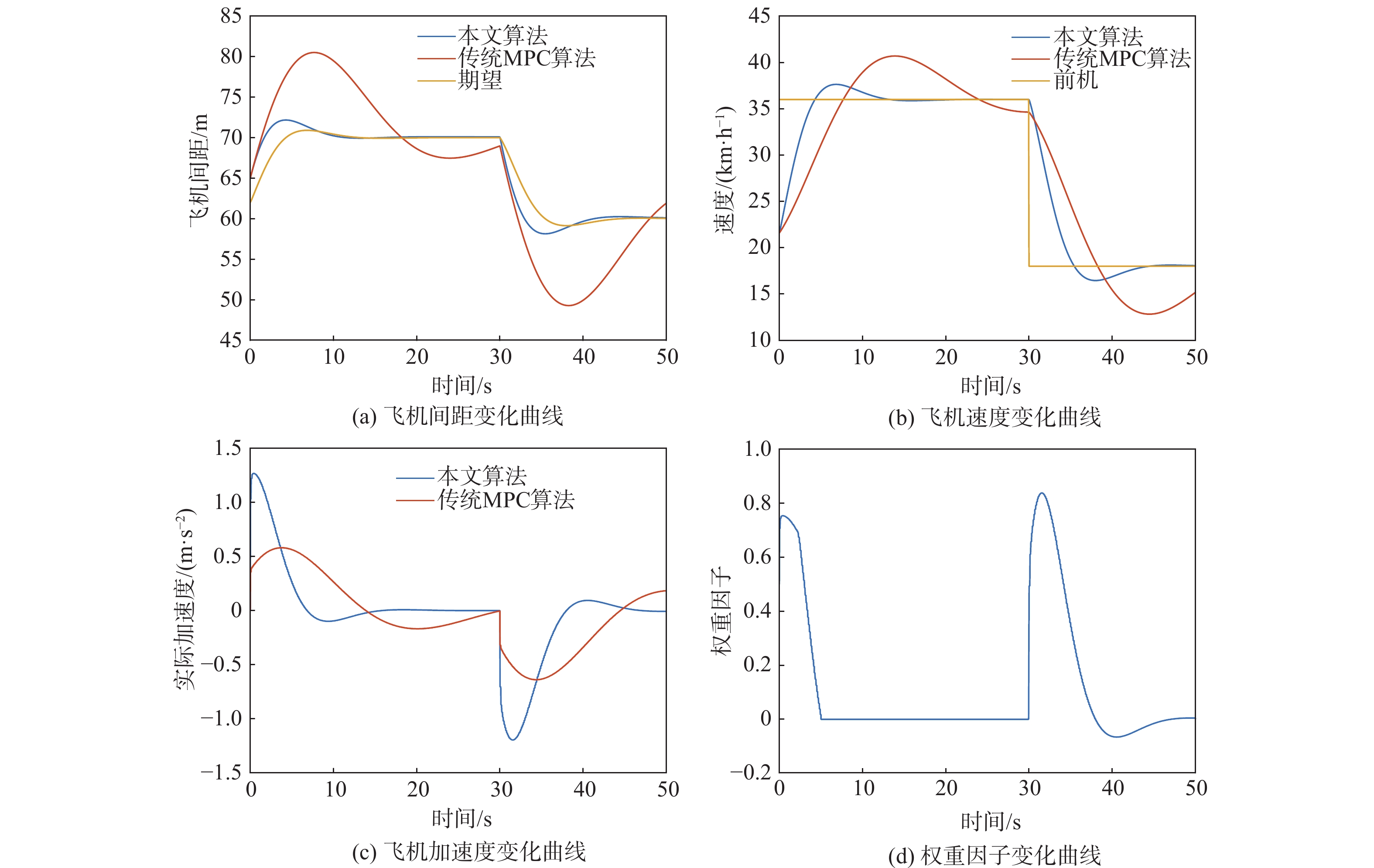
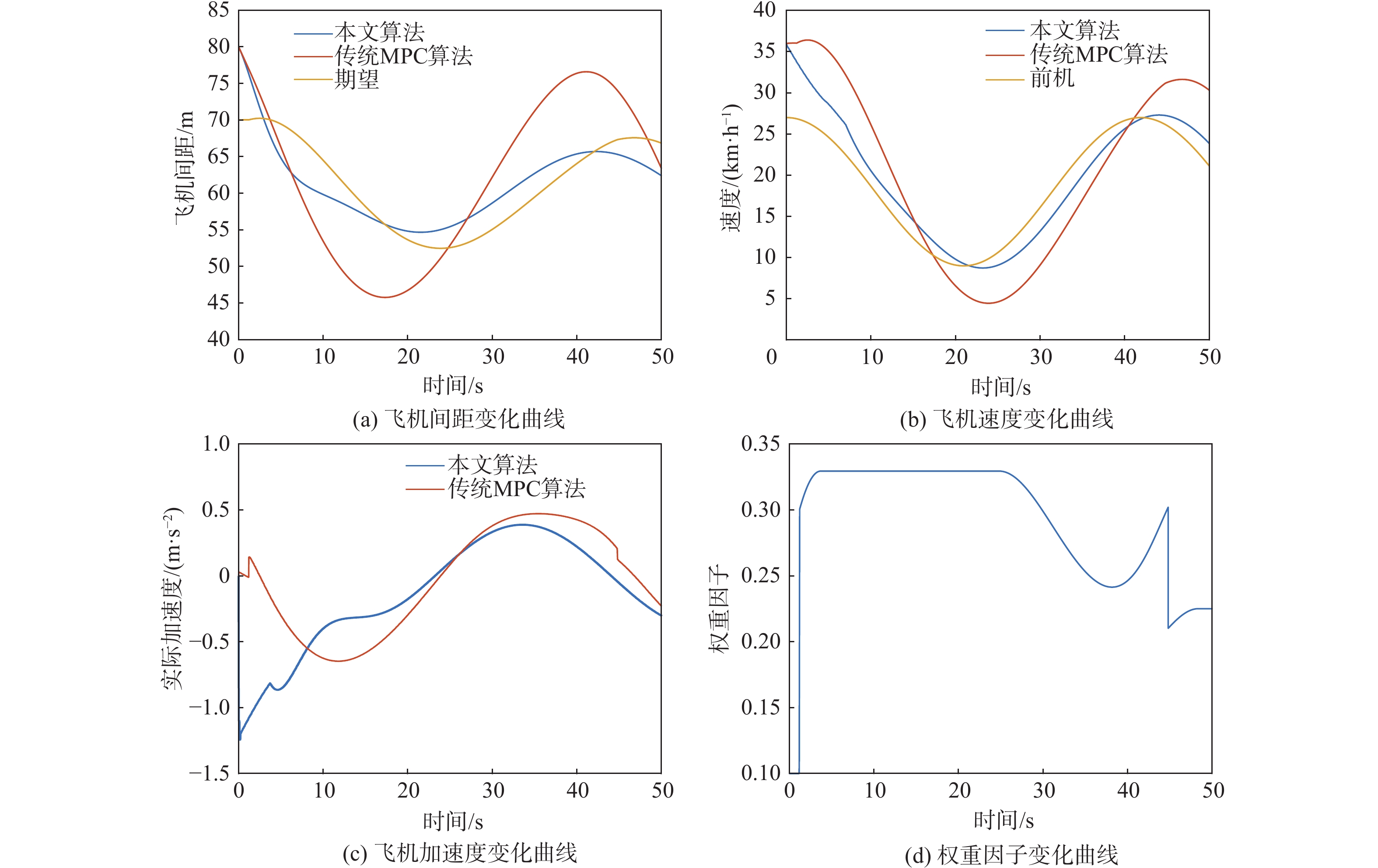
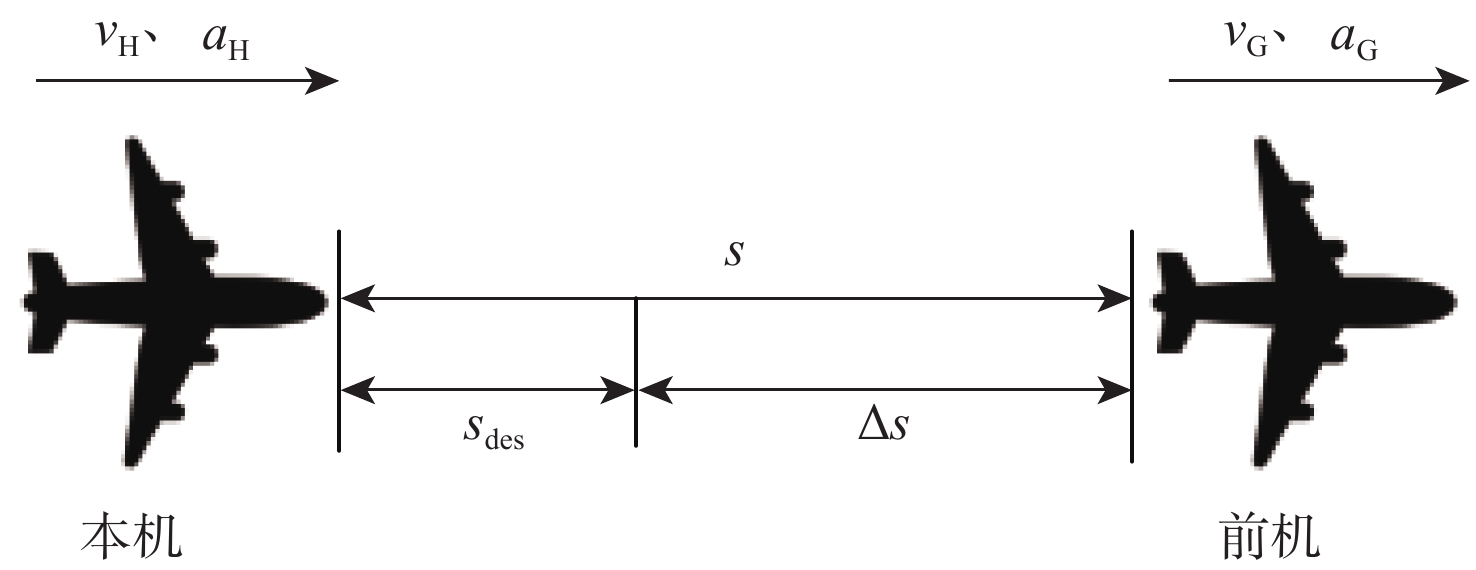
为避免飞机滑行时追尾风险并兼顾乘客的舒适性,提出一种基于模型预测控制(MPC)的多目标防撞优化算法。建立向运动学模型,考虑飞机滑行的安全性和乘客的舒适性设计目标函数及约束;以相对速度和间距作为参数,设计变权重函数,将其引入到MPC中,优化安全性权重,利用序列二次规划(SQP)算法对变权重MPC策略进行求解得到期望加速度,并对变权重MPC的稳定性进行分析。通过仿真实验验证所提算法在典型工况下的防撞效果,实验结果表明:所提算法在实现减速防撞的同时,优化了加速度变化幅度,提高了乘客舒适性。
Abstract:This work proposes a multi-objective collision avoidance optimization technique based on model predictive control (MPC) to reduce the probability of rear-end collisions during aircraft taxiing and for passenger comfort. Firstly, the longitudinal kinematic model of the airplane is established. Considering the safety of aircraft taxiing and passenger comfort design objective function and constraints. Secondly, the design of variable weight functions using relative velocity and spacing as parameters. Introducing it into the MPC to optimize security weights. The desired acceleration is obtained by solving the variable weight MPC control strategy using the sequential quadratic programming (SQP) algorithm, and analyzing the stability of variable weight MPCs. Lastly, simulation tests are used to confirm that the proposed algorithm can prevent collisions under two common operating situations The experimental results show that the proposed algorithm is useful in achieving the deceleration collision avoidance, and optimized acceleration change amplitude improves passenger comfort.
-
[1] 中国民用航空局发展规划司. 2022年全国民用运输机场生产统计公报[EB/OL]. (2023-03-16)[2024-05-21]. http://app.caac.gov.cn/XXGK/XXGK/TJSJ/202303/t20230317_217609.html.Department of Development Planning, Civil Aviation Administration of China. 2022 national civil transportation airport production statistics bulletin[EB/OL]. (2023-03-16)[2024-05-21]. http://app.caac.gov.cn/XXGK/XXGK/TJSJ/202303/t20230317_217609.html(in Chinese). [2] GUO B, WANG Z J, PAN Y J, et al. The control of the aircraft ground collision or scratch risk[J]. Civil Aviation Management, 2017, 2: 105-112. [3] 何仁, 冯海鹏. 自动紧急制动(AEB)技术的研究与进展[J]. 汽车安全与节能学报, 2019, 10(1): 1-15.HE R, FENG H P. Research and development of autonomous emergency brake (AEB) technology[J]. Journal of Automotive Safety and Energy, 2019, 10(1): 1-15(in Chinese). [4] 胡远志, 吕章洁, 刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J]. 汽车安全与节能学报, 2017, 8(2): 136-142.HU Y Z, LV Z J, LIU X. Algorithm and simulation verification of longitudinal collision avoidance for autonomous emergency break(AEB) system based on PreScan[J]. Journal of Automotive Safety and Energy, 2017, 8(2): 136-142(in Chinese). [5] BELLA F, RUSSO R. A collision warning system for rear-end collision: a driving simulator study[J]. Procedia - Social and Behavioral Sciences, 2011, 20: 676-686. doi: 10.1016/j.sbspro.2011.08.075 [6] 谈东奎, 胡港君, 朱波, 等. 考虑预期功能安全的智能汽车自动紧急制动系统[J]. 汽车工程, 2022, 44(6): 799-807.TAN D K, HU G J, ZHU B, et al. Intelligent vehicle autonomous emergency braking system considering safety of the intended functionality[J]. Automotive Engineering, 2022, 44(6): 799-807(in Chinese). [7] 兰凤崇, 余蒙, 李诗成, 等. 考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J]. 汽车工程, 2020, 42(2): 206-214.LAN F C, YU M, LI S C, et al. Research on hierarchical control strategy for automatic emergency braking system with consideration of time-to-collision[J]. Automotive Engineering, 2020, 42(2): 206-214(in Chinese). [8] 姜虹, 李峰. 不同路面条件下高速公路的停车视距建模与安全车速分析[J]. 西安工业大学学报, 2012, 32(1): 25-30.JIANG H, LI F. Modeling of stopping sight distance and analysis of safe speed on the freeway with different road conditions[J]. Journal of Xi’an Technological University, 2012, 32(1): 25-30(in Chinese). [9] LUO Q, CHEN X Q, YUAN J, et al. Study and simulation analysis of vehicle rear-end collision model considering driver types[J]. Journal of Advanced Transportation, 2020, 2020(1): 7878656. [10] KIM H, KIM D, SHU I, et al. Time-varying parameter adaptive vehicle speed control[J]. IEEE Transactions on Vehicular Technology, 2015, 65(2): 581-588. [11] ZHANG R H, LI K N, HE Z C, et al. Advanced emergency braking control based on a nonlinear model predictive algorithm for intelligent vehicles[J]. Applied Sciences, 2017, 7(5): 504. doi: 10.3390/app7050504 [12] 杨智博. 协同舒适性的自动驾驶汽车接管信号安全性测试方法研究[D]. 北京: 机械科学研究总院, 2022.YANG Z B. Research on the safety testing method of takeover signal for self-driving cars with cooperative comfort[D]. Beijing: Research Institute of Mechanical Sciences, 2022(in Chinese) . [13] LIU X H, SONG J, YU L Y, et al. Study on ride comfort in post-braking phase based on brake-by-wire system[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 237(2-3): 381-392. doi: 10.1177/09544070221079168 [14] 刘永涛, 刘传攀, 刘湘安, 等. 基于自适应采样时间MPC的自动紧急制动系统[J]. 汽车工程, 2023, 45(1): 32-41.LIU Y T, LIU C P, LIU X A et al. Automatic emergency braking system based on model predictive control with adaptive sampling time[J]. Automotive Engineering, 2023, 45(1): 32-41(in Chinese) . [15] 中华人民共和国交通运输部. 民用航空安全管理规定[EB/OL]. (2018-02-13)[2024-05-25]. http://www.caac.gov.cn/XXGK/XXGK/MHGZ/201803/t20180313_55750.html.Ministry of Transport of the People's Republic of China . Civil aviation safety management regulations[EB/OL]. (2018-02-13)[2024-05-25]. http://www.caac.gov.cn/XXGK/XXGK/MHGZ/201803/t20180313_55750.html. [16] 白晨光. 基于模糊MPC的商用车自适应巡航控制策略研究[D]. 长春: 吉林大学, 2022.BAI C G. Research on adaptive cruise control strategy for commercial vehicles based on fuzzy MPC[D]. Changchun: Jilin University, 2022(in Chinese). [17] GONDHALEKAR R, DASSAU E, DOYLE F J. Velocity-weighting & velocity-penalty MPC of an artificial pancreas: Improved safety & performance[J]. Automatica, 2018, 91: 105-117. doi: 10.1016/j.automatica.2018.01.025 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 220
- HTML全文浏览量: 77
- PDF下载量: 14
- 被引次数: 0
