



基于高增益扰动观测器的磁悬浮球系统滑模控制
doi: 10.13700/j.bh.1001-5965.2024.0518
Sliding mode control of magnetic levitation ball systems based on high-gain disturbance observer
 下载:
下载:

 点击查看大图
点击查看大图
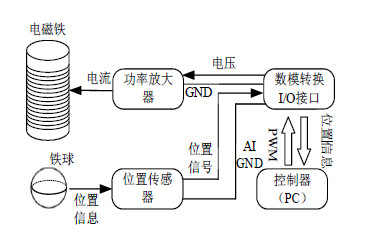
图(1)
计量
- 文章访问数: 28
- HTML全文浏览量: 3
- PDF下载量: 0
- 被引次数: 0
