



基于目标驱动蚁群优化算法的移动机器人路径规划方法
doi: 10.13700/j.bh.1001-5965.2025.0474
Mobile Robot Path Planning Based on Target-Driven Ant Colony Optimization Algorithm
 下载:
下载:

 点击查看大图
点击查看大图
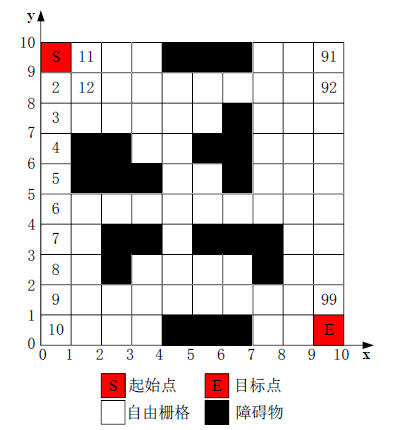
图(1)
计量
- 文章访问数: 13
- HTML全文浏览量: 9
- PDF下载量: 0
- 被引次数: 0
