



-
摘要:
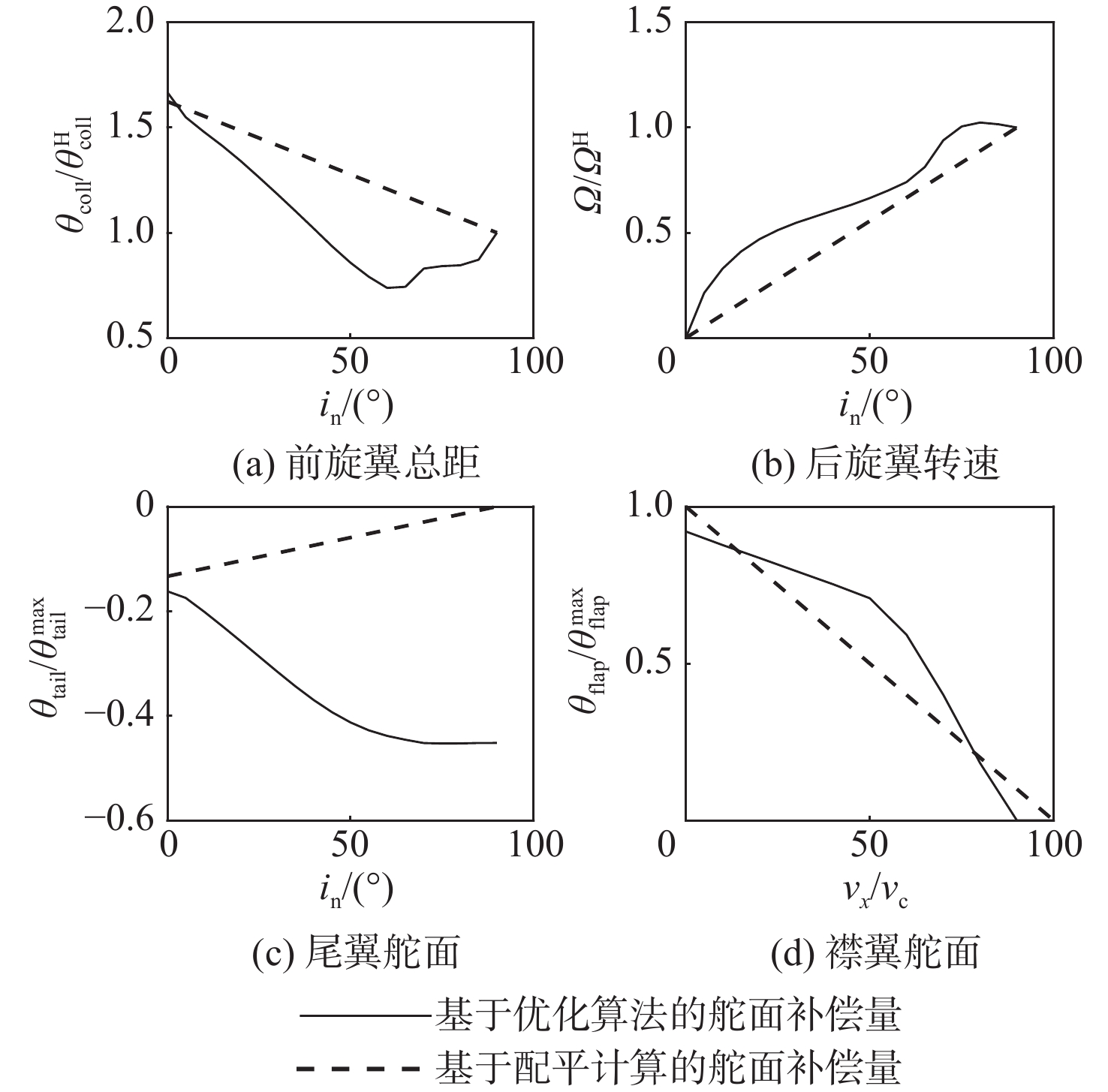
半倾转构型旋翼飞行器作为一种新构型的垂直起降飞行器,由于其多舵面带来的操作冗余与倾转过渡轨迹相耦合问题,仍没有较好的解决方案。为此,基于最优控制理论,针对半倾转构型旋翼飞行器纵向操纵冗余问题,同步开展舵面分配与动态倾转过渡轨迹优化研究。针对半倾转构型特点建立纵向刚体飞行力学模型,采用操纵速率作为控制量,避免优化过程中出现跳跃不连续的操纵策略,分析纵向舵面分配问题,建立混合操纵方程。将飞行器过渡倾转过程的轨迹优化问题转化为非线性动态最优控制问题,选取合理的优化目标与约束条件,建立最优控制模型。选取不同的舵面分配方程与目标函数,多次开展正向和逆向倾转过渡过程的优化计算,并进行参数影响性分析,同步确定飞行器舵面分配及过渡飞行最优操纵策略与飞行轨迹。采用仿真分析验证了方法的有效性。相比于传统的先基于配平计算确定舵面分配,再通过优化计算确定飞行轨迹的策略制定方式,姿态的稳定性与操纵负荷得到显著的优化。
Abstract:The partial tilting aircraft, a novel kind of vertical take-off and landing aircraft, lacks a suitable way to address the operational redundancy brought on by its multiple rudders. Based on the optimal control theory, the problem of longitudinal manipulation of the partial tilting aircraft is carried out, and the distribution of rudder and the dynamic tilt rotation are optimized. The longitudinal rigid body flight mechanics model was established. The first derivative of the control quantity is used as the control quantity to avoid the jumping discontinuity in the optimization process. In this research, a hybrid control equation is established and the longitudinal control surface allocation problem is investigated. The trajectory optimization problem of the transition of the aircraft is transformed into a nonlinear dynamic optimal control problem. This study selects reasonable optimization objectives and constraints to establish an optimal control model. The equation and the target function of the rudder surface are selected. The control surface allocation and optimal maneuvering strategy for transitional flight of the aircraft are determined simultaneously with the flight trajectory. Compared with the traditional approach of first determining control surface allocation based on trim calculations and then determining the flight trajectory through optimization, this method significantly improves attitude stability and reduces control load. The effectiveness of the method has been validated through simulation analysis.
-
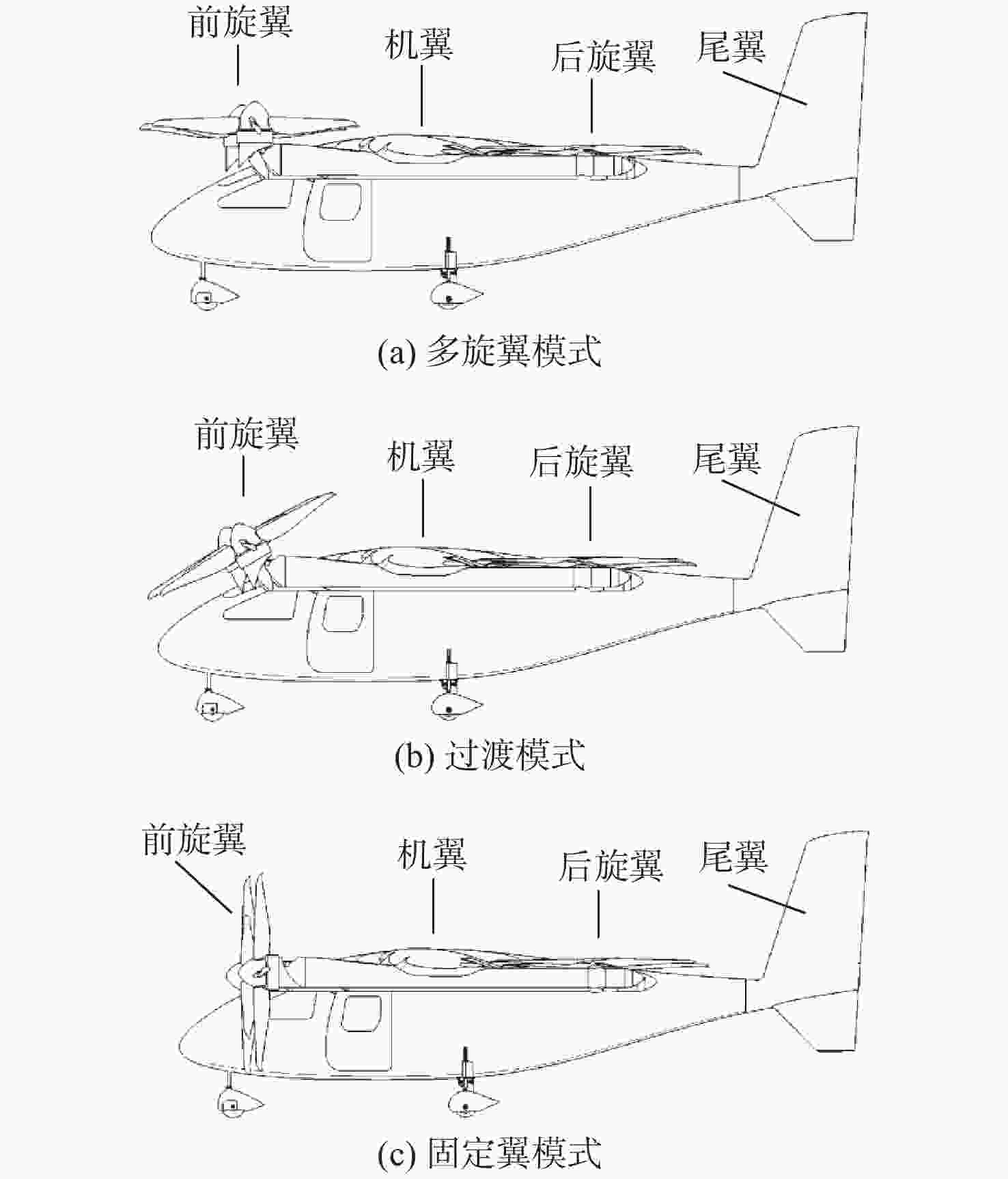
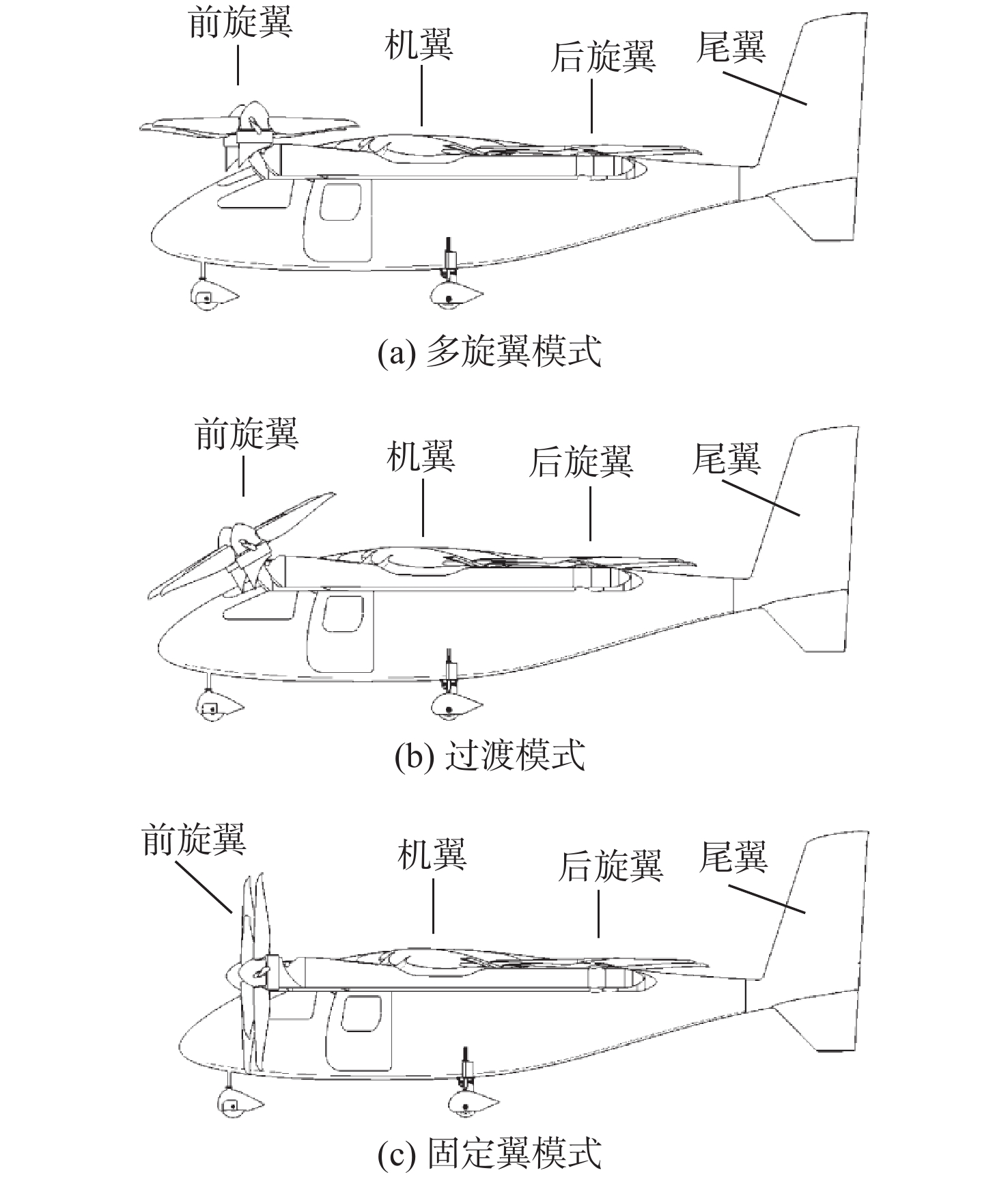
图 1 半倾转构型旋翼飞行器飞行模式
Figure 1. Partial tilting configuration rotor aircraft flight modes
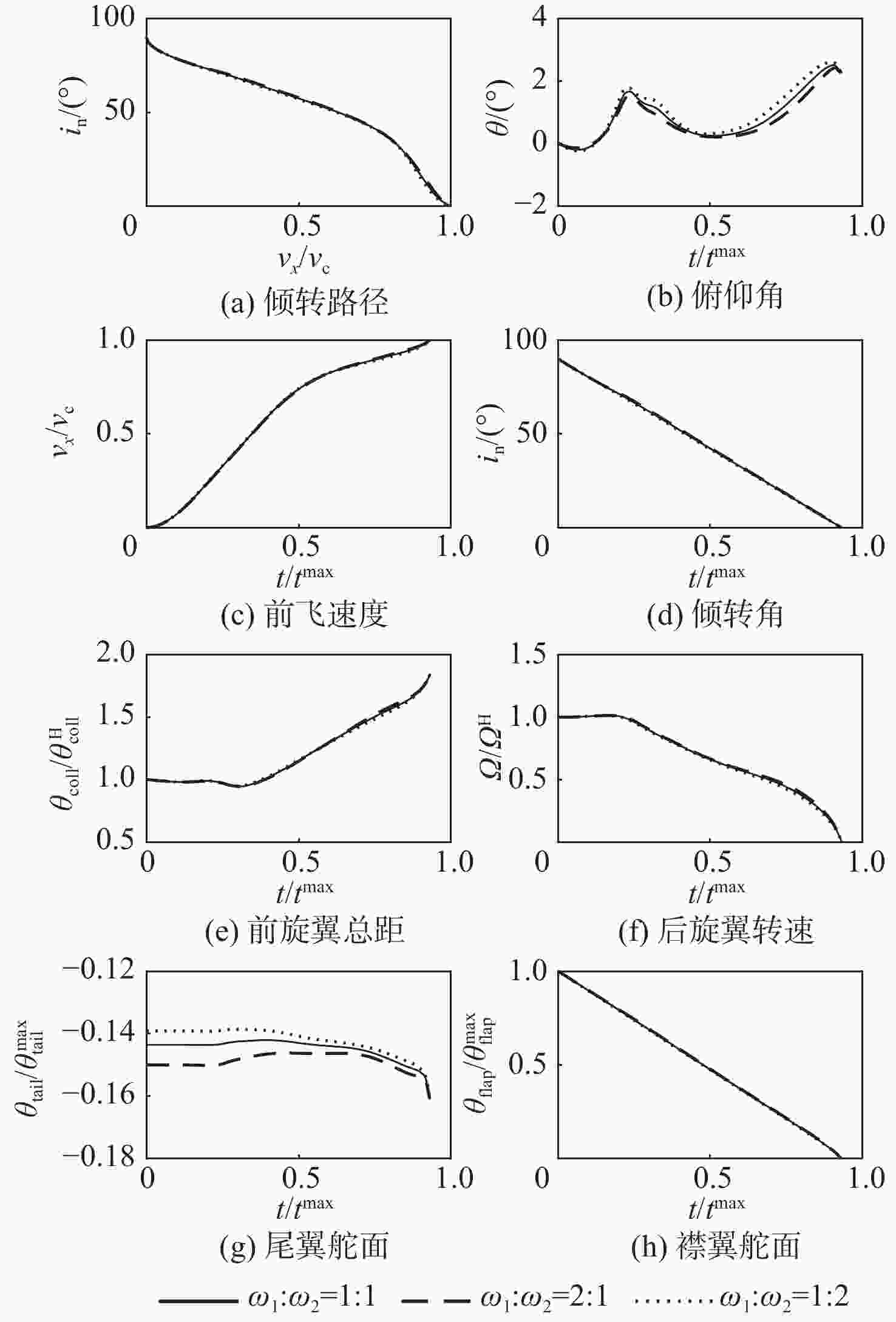
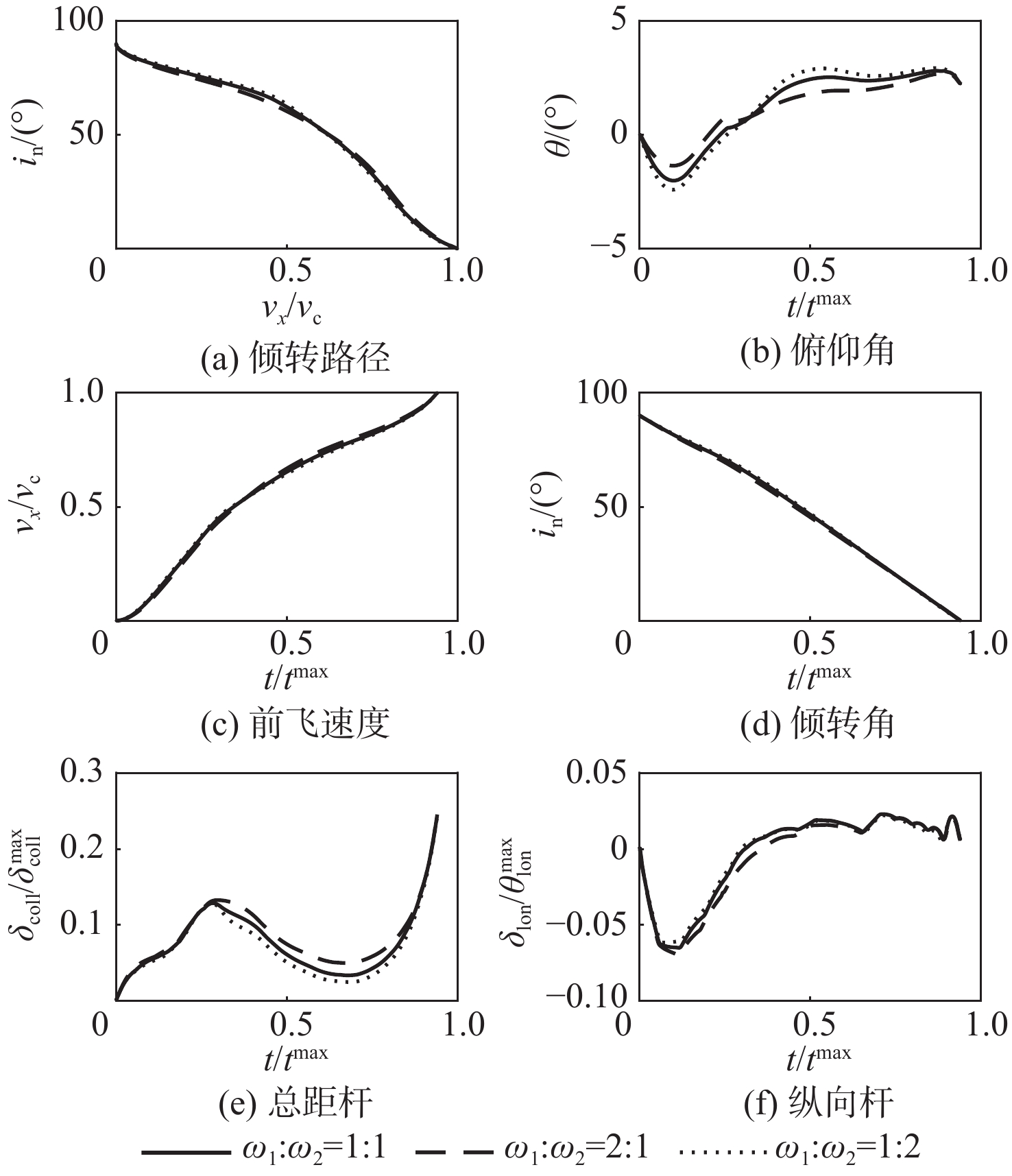
图 2 基于操纵面的正向动态倾转过渡最优解
Figure 2. Optimal solution for accelerating dynamic conversion based on control surfaces
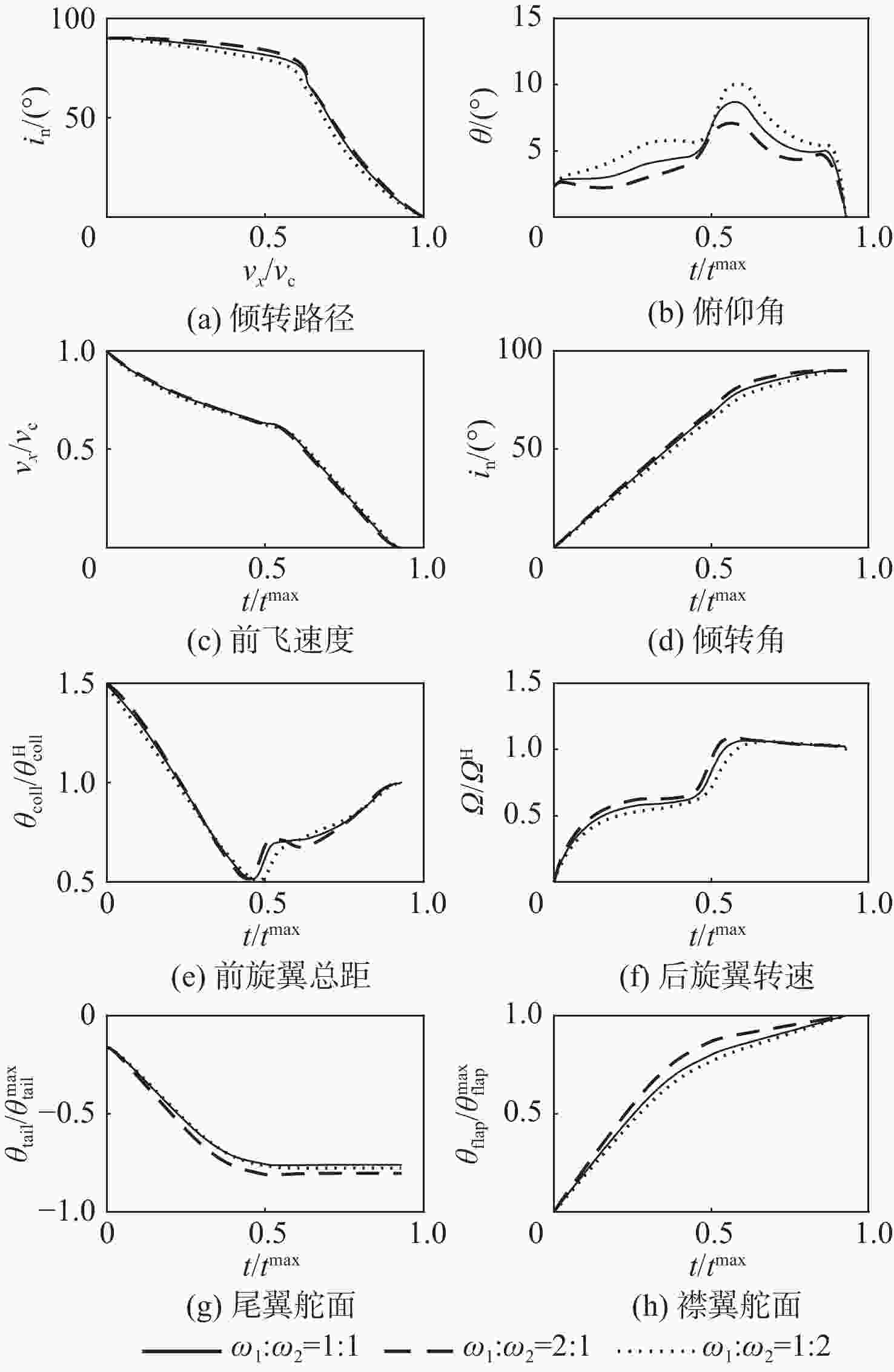
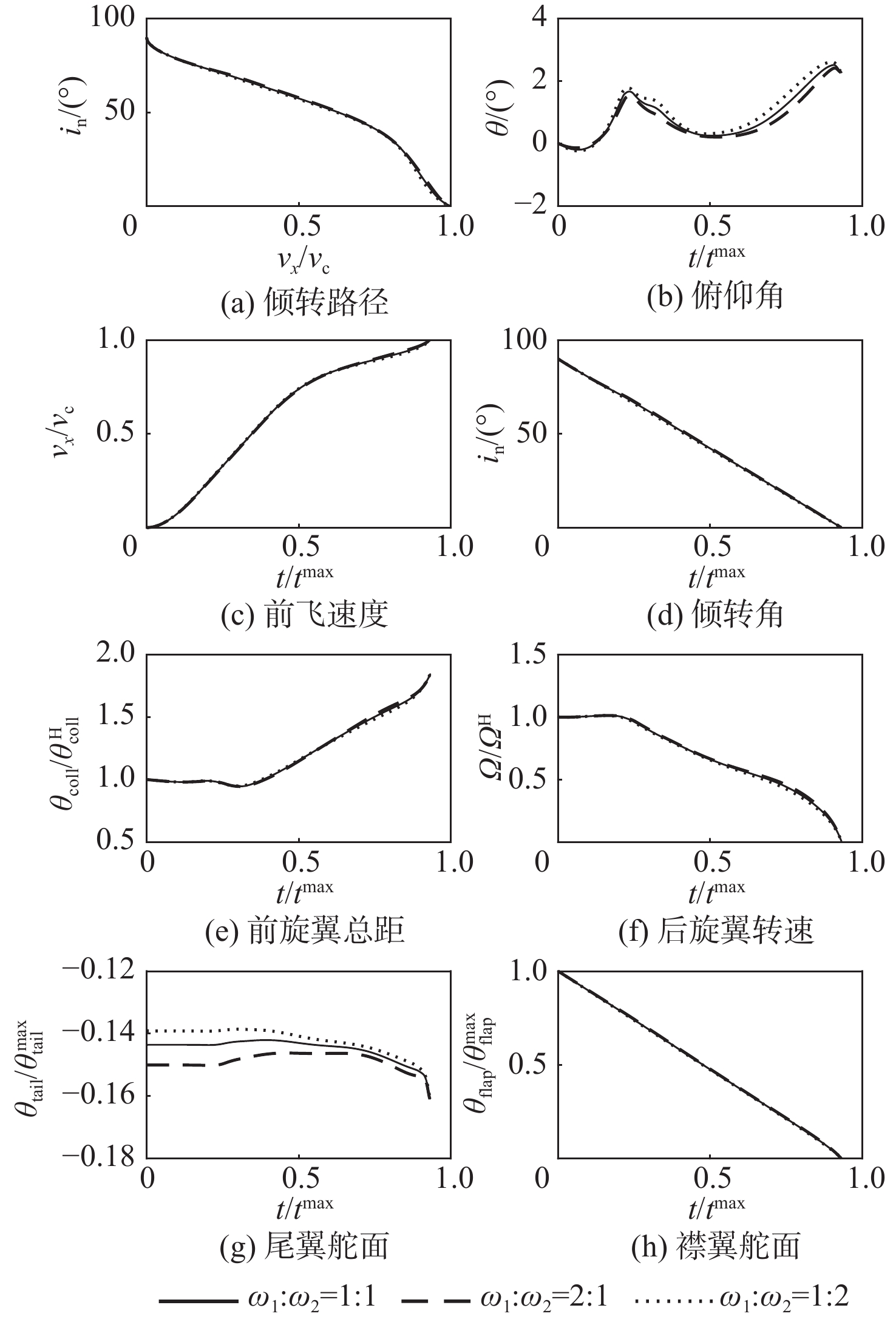
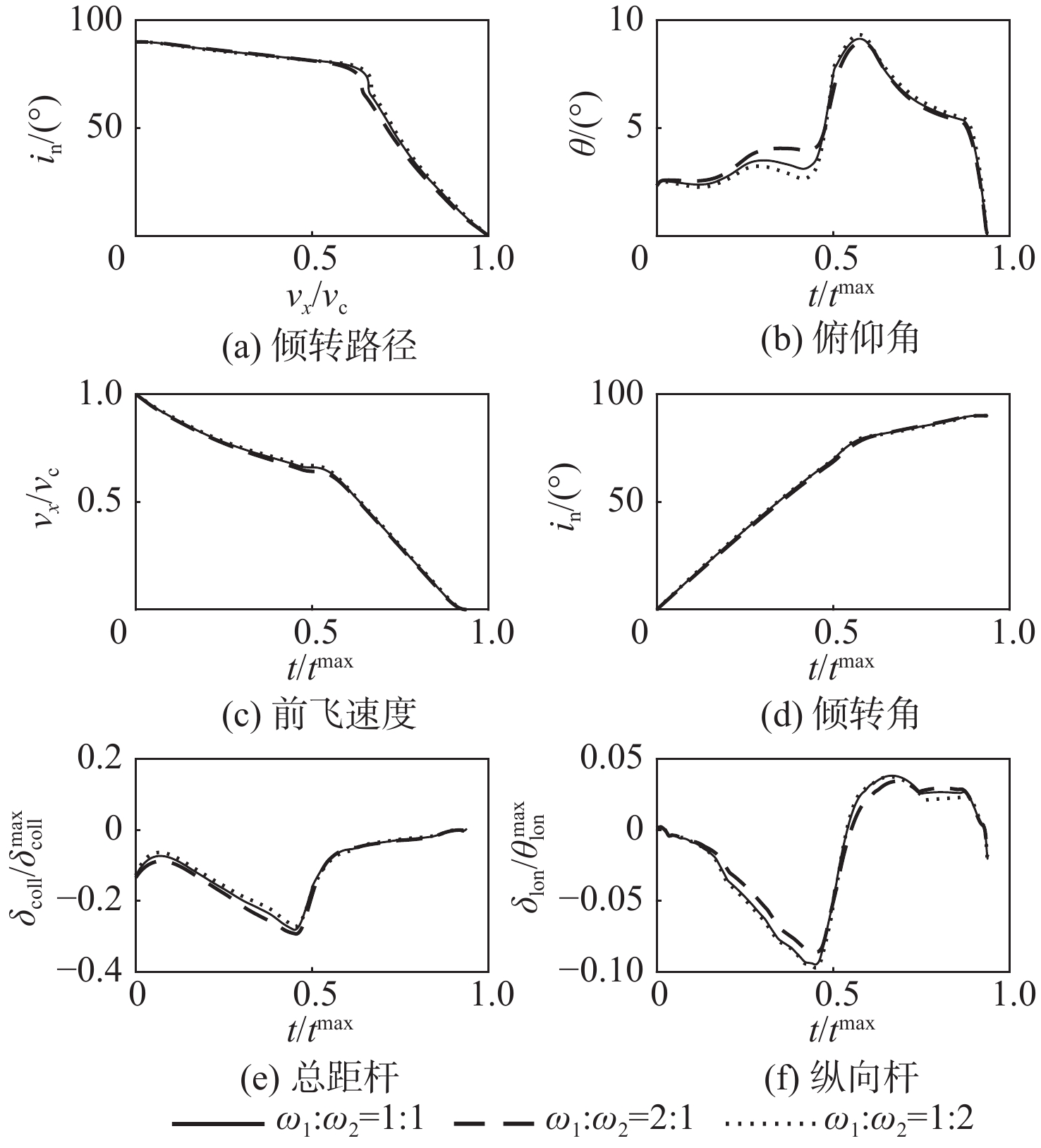
图 3 基于操纵面的逆向动态倾转过渡最优解
Figure 3. Optimal solution for decelerating dynamic conversion based on control surfaces
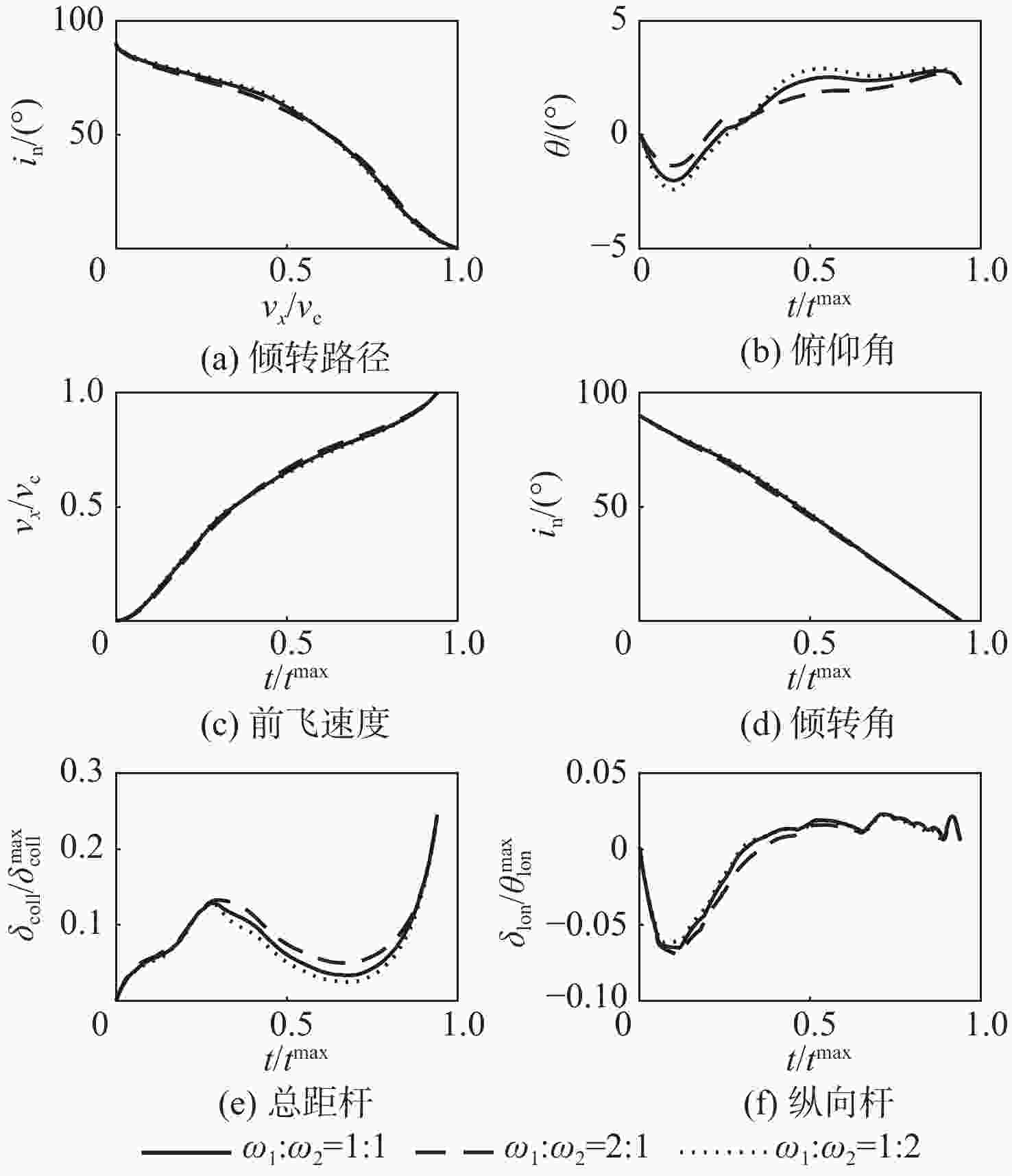
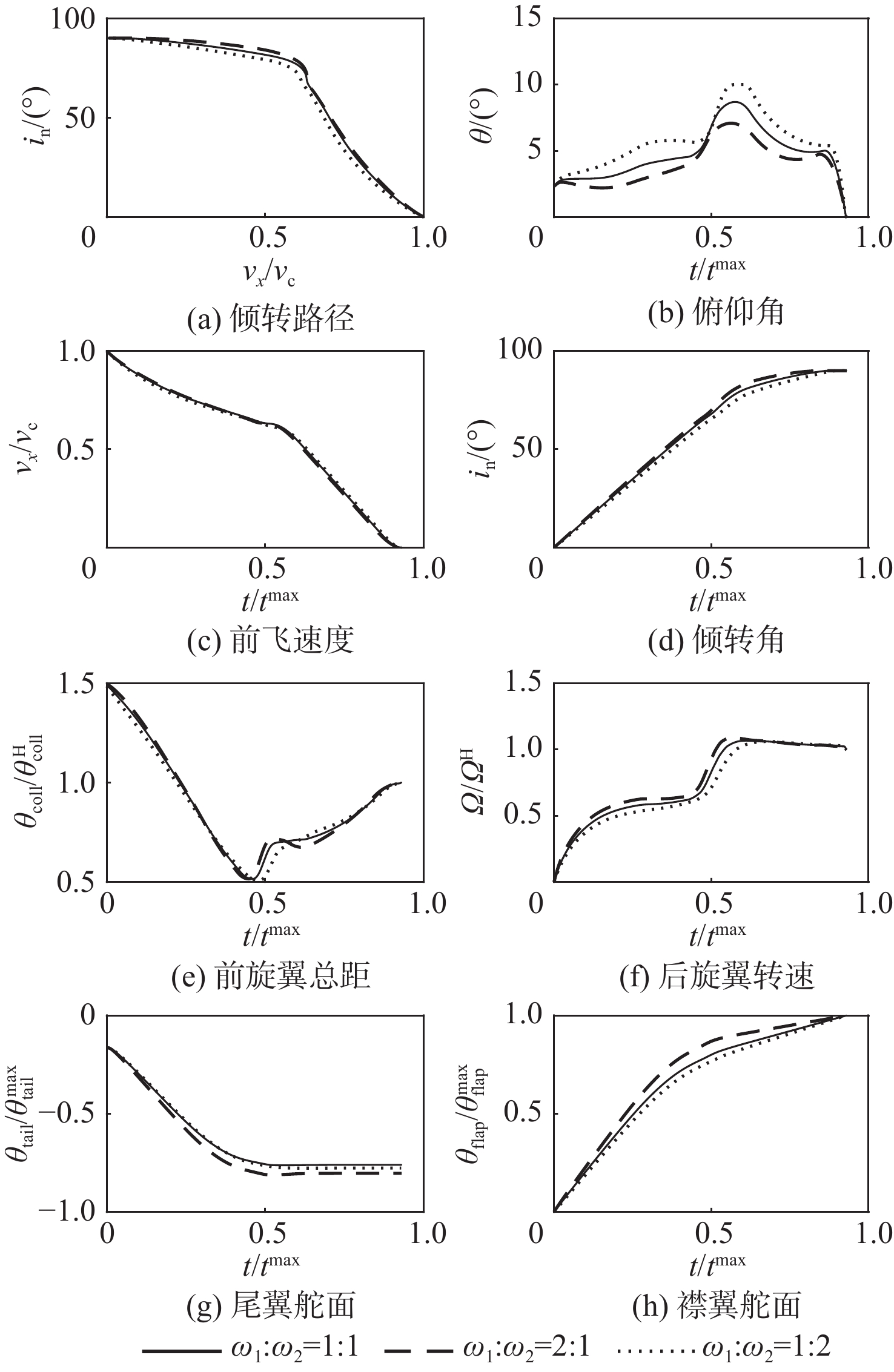
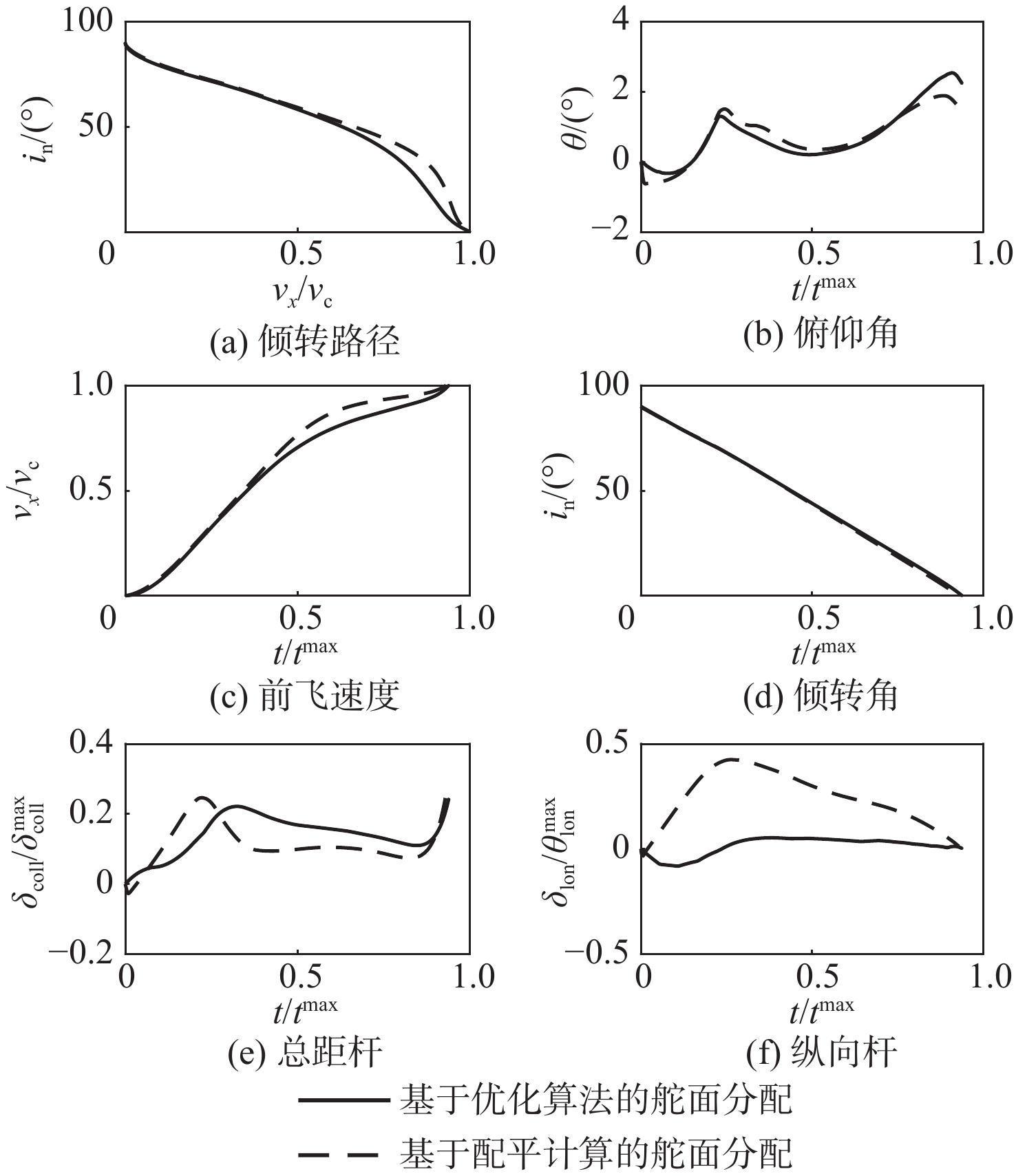
图 5 基于舵面分配的正向动态倾转过渡最优解
Figure 5. Optimal solution for accelerating dynamic conversion based on control surface allocation
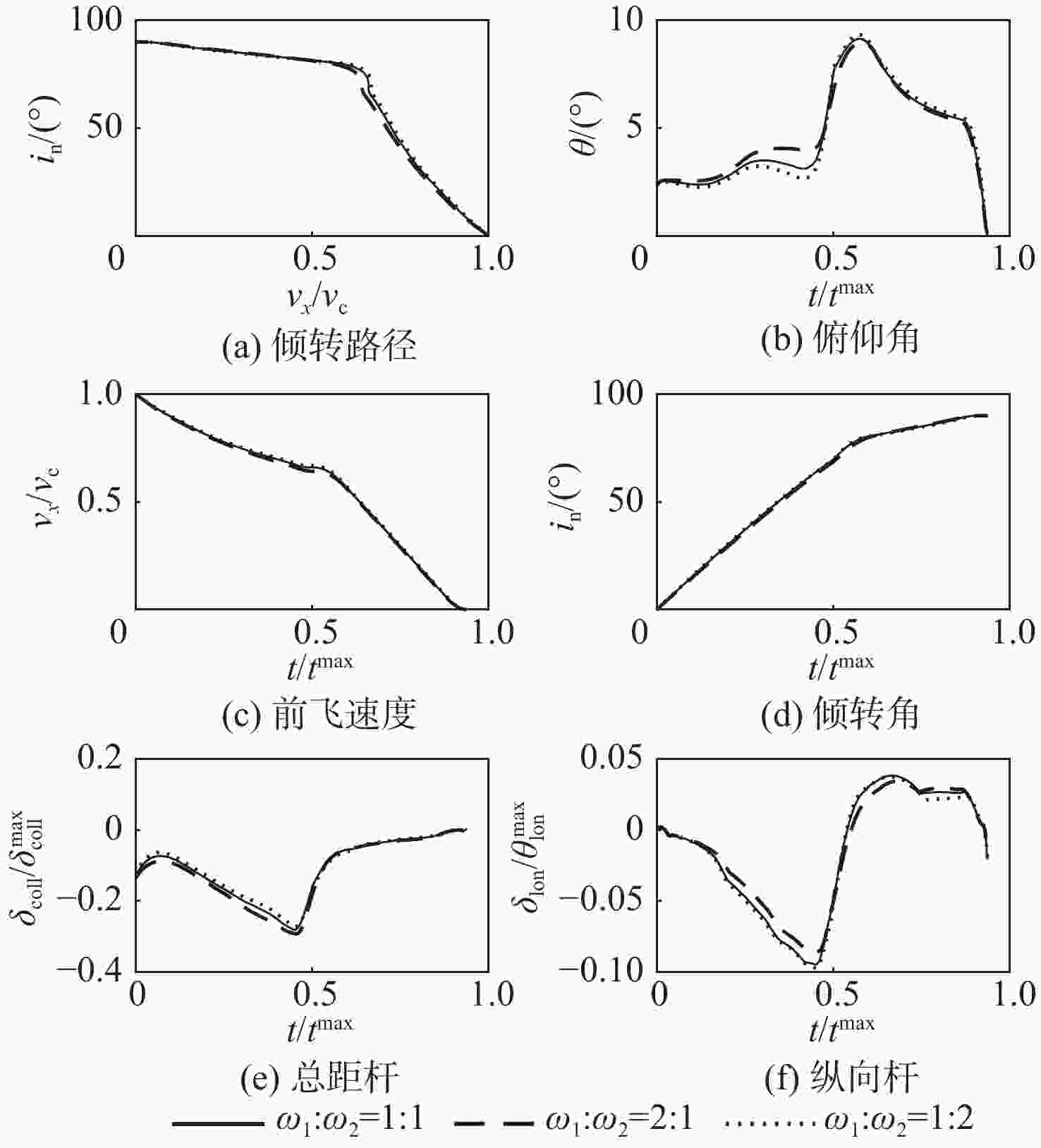
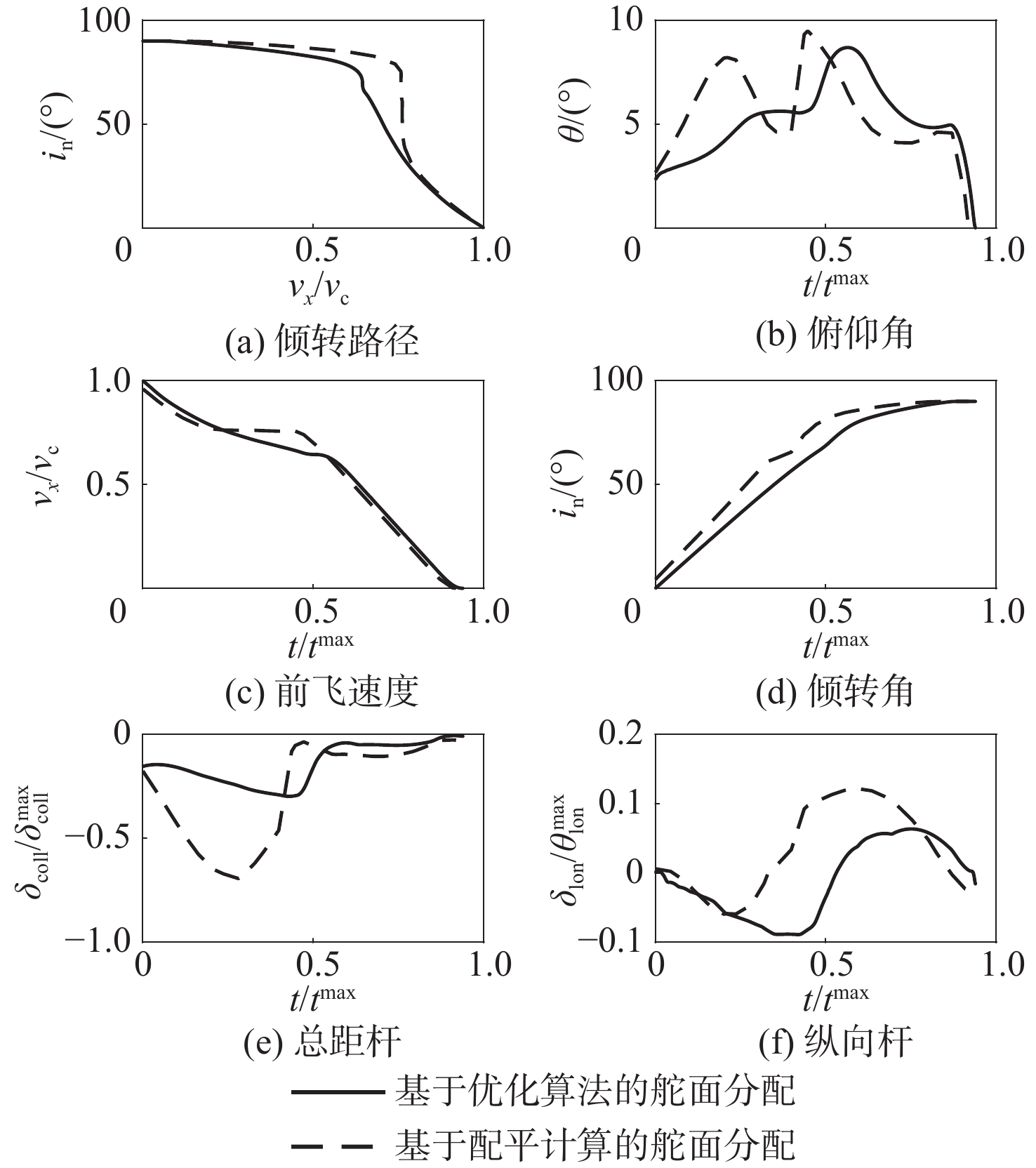
图 6 基于舵面分配的逆向动态倾转过渡最优解
Figure 6. Optimal solution for decelerating dynamic conversion based on control surface allocation
表 1 基于操纵面的正向过渡不同权重系数优化目标比值
Table 1. Optimizing objective ratios for different weight coefficients for accelerating dynamic conversion based on control surfaces
优化目标变量 优化目标比值 $ \displaystyle\int\theta _{(1 : 1)}^{2} : \displaystyle\int\theta _{(2 : 1)}^{2} : \displaystyle\int\theta _{(1 : 2)}^{2} $ 1∶0.78∶1.27 $ \displaystyle\int q_{(1 : 1)}^{2} : \displaystyle\int q_{(2 : 1)}^{2} : \displaystyle\int q_{(1 : 2)}^{2} $ 1∶0.85∶1.16 $ \displaystyle\sum\displaystyle\int\varDelta _{(1 : 1)}^{2} : \displaystyle\sum\displaystyle\int\varDelta _{(2 : 1)}^{2} : \displaystyle\sum\displaystyle\int{\varDelta }_{(1 : 2)}^{2} $ 1∶1.01∶0.99 $ \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(1 : 1)}^{2} : \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(2 : 1)}^{2} : \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(1 : 2)}^{2} $ 1∶1.09∶0.98  下载: 导出CSV
下载: 导出CSV
表 2 基于操纵面的逆向过渡不同权重系数优化目标比值
Table 2. Different weight coefficients for optimizing objective ratios for decelerating dynamic conversion based on control surfaces
优化目标变量 优化目标比值 $ \displaystyle\int\theta _{(1 : 1)}^{2} : \displaystyle\int\theta _{(2 : 1)}^{2} : \displaystyle\int\theta _{(1 : 2)}^{2} $ 1∶0.67∶1.44 $ \displaystyle\int q_{(1 : 1)}^{2} : \displaystyle\int q_{(2 : 1)}^{2} : \displaystyle\int q_{(1 : 2)}^{2} $ 1∶0.61∶1.91 $ \displaystyle\sum\displaystyle\int\varDelta _{(1 : 1)}^{2} : \displaystyle\sum\displaystyle\int\varDelta _{(2 : 1)}^{2} : \displaystyle\sum\displaystyle\int{\varDelta }_{(1 : 2)}^{2} $ 1∶1.12∶0.91 $ \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(1 : 1)}^{2} : \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(2 : 1)}^{2} : \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(1 : 2)}^{2} $ 1∶1.75∶0.64
下载: 导出CSV
表 3 正向过渡舵面操纵分配系数
Table 3. Control distribution coefficients of rudder for accelerating dynamic conversion
$ {\omega }_{1} : {\omega }_{2} $ $ \dfrac{\partial {\theta }_{{\rm{coll}}}}{\partial \delta } : \dfrac{\partial \varOmega }{\partial \delta } : \dfrac{\partial {\theta }_{\rm{tail}}}{\partial \delta } $ 2∶1 $ \theta _{{\rm{coll}}}^{\max } : 1.94 {\varOmega }^{\max } : 0.41 \theta _{\mathrm{tail}}^{\max } $ 1∶1 $ \theta _{{\rm{coll}}}^{\max } : 1.54 {\varOmega }^{\max } : 0.37 \theta _{\mathrm{tail}}^{\max } $ 1∶2 $ \theta _{{\rm{coll}}}^{\max } : 1.31 {\varOmega }^{\max } : 0.33 \theta _{\mathrm{tail}}^{\max } $
下载: 导出CSV
表 4 基于舵面分配的正向过渡不同权重系数优化目标比值
Table 4. Optimizing objective ratios for different weight coefficients for accelerating dynamic conversion based on control surface allocation
优化目标变量 优化目标比值 $ \displaystyle\int\theta _{(1 : 1)}^{2} : \displaystyle\int\theta _{(2 : 1)}^{2} : \displaystyle\int\theta _{(1 : 2)}^{2} $ 1∶0.69∶1.24 $ \displaystyle\int q_{(1 : 1)}^{2} : \displaystyle\int q_{(2 : 1)}^{2} : \displaystyle\int q_{(1 : 2)}^{2} $ 1∶0.61∶1.37 $ \displaystyle\sum\displaystyle\int\varDelta _{(1 : 1)}^{2} : \displaystyle\sum\displaystyle\int\varDelta _{(2 : 1)}^{2} : \displaystyle\sum\displaystyle\int{\varDelta }_{(1 : 2)}^{2} $ 1∶1.32∶0.87 $ \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(1 : 1)}^{2} : \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(2 : 1)}^{2} : \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(1 : 2)}^{2} $ 1∶1.57∶0.83
下载: 导出CSV
表 5 逆向过渡舵面操纵分配系数
Table 5. Control distribution coefficients of rudder for decelerating dynamic conversion
$ {\omega }_{1} : {\omega }_{2} $ $ \dfrac{\partial {\theta }_{{\rm{coll}}}}{\partial \delta } : \dfrac{\partial \varOmega }{\partial \delta } : \dfrac{\partial {\theta }_{\rm{tail}}}{\partial \delta } $ 2∶1 $ \theta _{{\rm{coll}}}^{\max } : 0.42 {\varOmega }^{\max } : 1.55 \theta _{\mathrm{tail}}^{\max } $ 1∶1 $ \theta _{{\rm{coll}}}^{\max } : 0.45 {\varOmega }^{\max } : 1.11 \theta _{\mathrm{tail}}^{\max } $ 1∶2 $ \theta _{{\rm{coll}}}^{\max } : 0.45 {\varOmega }^{\max } : 0.98 \theta _{\mathrm{tail}}^{\max } $
下载: 导出CSV
表 6 基于舵面分配的逆向过渡不同权重系数优化目标比值
Table 6. Optimizing objective ratios for different weight coefficients for decelerating dynamic conversion based on control surface allocation
优化目标变量 优化目标比值 $ \displaystyle\int\theta _{(1 : 1)}^{2} : \displaystyle\int\theta _{(2 : 1)}^{2} : \displaystyle\int\theta _{(1 : 2)}^{2} $ 1∶1.01∶0.93 $ \displaystyle\int q_{(1 : 1)}^{2} : \displaystyle\int q_{(2 : 1)}^{2} : \displaystyle\int q_{(1 : 2)}^{2} $ 1∶1.17∶0.82 $ \displaystyle\sum\displaystyle\int\varDelta _{(1 : 1)}^{2} : \displaystyle\sum\displaystyle\int\varDelta _{(2 : 1)}^{2} : \displaystyle\sum\displaystyle\int{\varDelta }_{(1 : 2)}^{2} $ 1∶0.98∶1.01 $ \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(1 : 1)}^{2} : \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(2 : 1)}^{2} : \displaystyle\sum\displaystyle\int\dot{\varDelta }_{(1 : 2)}^{2} $ 1∶0.97∶1.05
下载: 导出CSV
表 7 舵面操纵分配系数
Table 7. Control distribution coefficients of rudder
$ {\omega }_{1} : {\omega }_{2} $ $ \dfrac{\partial {\theta }_{{\rm{coll}}}}{\partial \delta } : \dfrac{\partial \varOmega }{\partial \delta } : \dfrac{\partial {\theta }_{\rm{tail}}}{\partial \delta } $ 2∶1 $ \theta _{{\rm{coll}}}^{\max } : 0.98 {\varOmega }^{\max } : 0.96 \theta _{\mathrm{tail}}^{\max } $ 1∶1 $ \theta _{{\rm{coll}}}^{\max } : 0.88 {\varOmega }^{\max } : 0.72 \theta _{\mathrm{tail}}^{\max } $ 1∶2 $ \theta _{{\rm{coll}}}^{\max } : 0.85 {\varOmega }^{\max } : 0.64 \theta _{\mathrm{tail}}^{\max } $
下载: 导出CSV
-
[1] YAN X F, YUAN Y, CHEN R L. Research on pilot control strategy and workload for tilt-rotor aircraft conversion procedure[J]. Aerospace, 2023, 10(9): 742. [2] LI F Y, XU W Q, SHI Y, et al Multi-body dynamic modeling, simulation and control strategy design of a Y6 tilt rotor UAV[C]//Proceedins of the 2017 2nd International Conference on Advanced Robotics and Mechatronics. Piscataway: IEEE Press, 2017: 373-379. [3] BAUERSFELD L, SPANNAGL L, DUCARD G J J, et al. MPC flight control for a tilt-rotor VTOL aircraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(4): 2395-2409. [4] ZHOU P, CHEN R L, YU Z M. Investigation of control strategy for quad-tilt-rotor aircraft in helicopter mode[J]. Journal of Aeronautical Dynamics, 2021, 36(10): 2036-2051. [5] NIETO-HERNÁNDEZ D, MÉNDEZ-BARRIOS C F, ESCARENO J, et al. Non-holonomic flight modeling and control of a tilt-rotor MAV[C]//Proceedins of the 2019 6th International Conference on Control, Decision and Information Technologies. Piscataway: IEEE Press, 2019: 1947-1952. [6] MA Z Q, SMEUR E J J, DE CROON G C H E. Design and control of a tilt-rotor tail sitter aircraft with pivoting VTOL capability[J]. IEEE Robotics and Automation Letters, 2025, 10(6): 5911-5918. [7] FANG T R, DU C P, YANG R, et al. Nonlinear model predictive control of tilt-rotor UAV under A dual differential model based on INDI strategy[J]. Unmanned Systems , 2025: 1-14. [8] 王梓旭, 李攀, 沈俊彪, 等. 加/减速状态下倾转旋翼飞行器动态过渡走廊[J]. 航空学报, 2025, 46(11): 366-385.WANG Z X, LI P, SHEN J B, et al. Dynamic conversion corridor of tiltrotor aircraft under accelerating and decelerating conditions[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 366-385(in Chinese). [9] 徐绍峰, 常绍平, 金鑫, 等. 面向倾转旋翼机的TRC响应类型控制律设计[J]. 航空科学技术, 2023, 34(9): 87-93.XU S F, CHANG S P, JIN X, et al. Design of TRC response type control law for tiltrotor aircraft[J]. Aeronautical Science & Technology, 2023, 34(9): 87-93(in Chinese). [10] 吴榕. 变转速/变直径倾转旋翼机飞行性能及操纵策略分析[D]. 南京: 南京航空航天大学, 2022.WU R. Analyses on flight performance and control strategy of variable rotation speed/variable diameter tilt-rotor aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2022(in Chinese). [11] WANG Z, BAO W, LI Y, et al. A survey of control allocation methods for spacecraft and aerial vehicles[J]. Acta Astronautica, 2022, 190: 85-103. [12] LIU X X, YUAN Z K, GAO Z W, et al. Reinforcement learning-based fault-tolerant control for quadrotor UAVs under actuator fault[J]. IEEE Transactions on Industrial Informatics, 2024, 20(12): 13926-13935. [13] JOHANSEN T A, FOSSEN T I, BERGE S P. Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming[J]. IEEE Transactions on Control Systems Technology, 2004, 12(1): 211-216. [14] DI MILANO P, RIGHETTI A, MUSCARELLO V, et al. Linear parameter varying models for the optimization of tiltrotor conversion maneuver[C]//Proceedings of the Vertical Flight Society 73rd Annual Forum. Fort Worth: The Vertical Flight Society, 2017: 1-8. [15] 蒋海辉. 倾转四旋翼飞行器操纵策略研究[D]. 南京: 南京航空航天大学, 2019.JIANG H H. Manipulation strategy for quad tilt rotor aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019(in Chinese). [16] KLEINHESSELINK K M. Stability and control modeling of tiltrotor aircraft[D]. College Park: University of Maryland, 2007. [17] LUO L W, XU S, SU C Y, et al. Fixed-time composite observer-based adaptive recursive sliding mode control for tiltrotor UAV attitude tracking[J]. Nonlinear Dynamics, 2025, 113(15): 20031-20056. [18] LI W, SHI S, CHEN M, et al. Composite anti-disturbance tracking control for the conversion mode of tilt-rotor aircraft via switched fuzzy modeling[J]. International Journal of Control, Automation and Systems, 2025, 23(3): 960-972. [19] CHEN Q, ZHANG N, XUE L L, et al. Research on mathematical modeling method of tilt-rotor aircraft[C]//Proceedins of the Advances in Guidance, Navigation and Control. Berlin: Springer, 2025: 330-338. [20] CHEN Z Y, ZHANG Z Q, SHENG S Z, et al. Transition trajectory planning for tilt-rotor aircraft based on SA-IGA algorithm[C]//Proceedins of the Advances in Guidance, Navigation and Control. Berlin: Springer, 2025: 298-308. [21] GONG H X, HE W, HOU S P, et al. Design and validation of a new tilting rotor VTOL drone: structural optimization, flight dynamics, and PID control[J]. Sensors, 2025, 25(11): 3537-3579. [22] 陈金鹤, 汪正中, 田洪源. 基于最优控制理论的倾转旋翼机跃障飞行仿真[J]. 西北工业大学学报, 2020, 38(6): 1266-1274.CHEN J H, WANG Z Z, TIAN H Y. Hurdle-hop simulation of tilt-rotor aircraft based on optimal control theory[J]. Journal of Northwestern Polytechnical University, 2020, 38(6): 1266-1274(in Chinese). [23] 严旭飞, 陈仁良. 倾转旋翼机动态倾转过渡过程的操纵策略优化[J]. 航空学报, 2017, 38(7): 520865.YAN X F, CHEN R L. Control strategy optimization of dynamic conversion procedure of tilt-rotor Aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(7): 520865(in Chinese). [24] FERGUSON S W. A mathematical model for real time flight simulation of a generic tilt rotor aircraft: NASA CR-166536[R]. Washington, D. C. : NASA, 1988. [25] 严旭飞. 倾转旋翼机倾转过渡操纵策略研究[D]. 南京: 南京航空航天大学, 2019.YAN X F. Research on control strategy of conversion procedure of tilt-rotor aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 63
- HTML全文浏览量: 39
- PDF下载量: 7
- 被引次数: 0
