



四足机器人运动中的探索-平滑-奖励塑形协同算法
doi: 10.13700/j.bh.1001-5965.2025.0864
An exploration-smoothing-reward shaping collaborative algorithm for quadrupedal robot locomotion
 下载:
下载:

 点击查看大图
点击查看大图
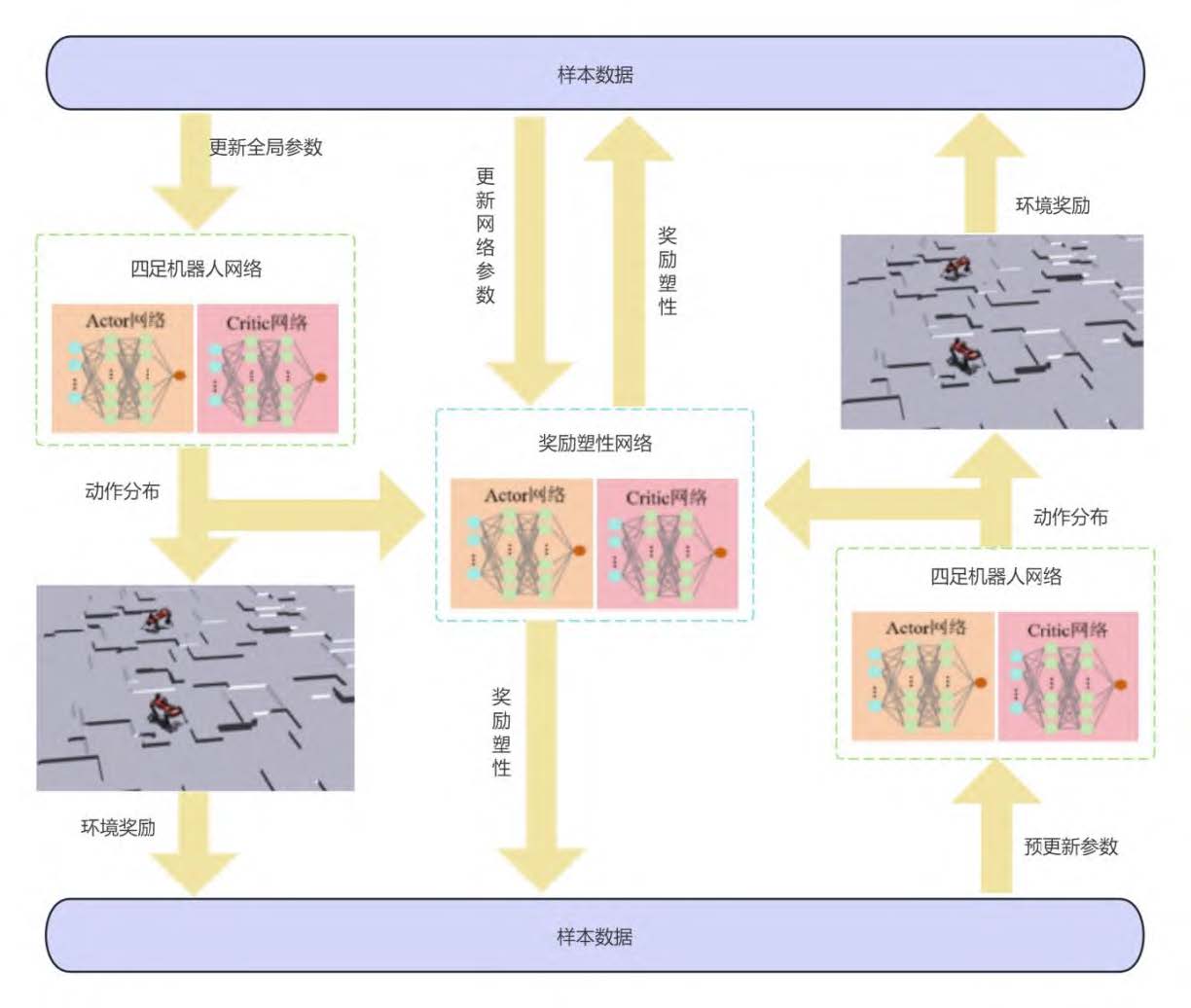
图(1)
计量
- 文章访问数: 38
- HTML全文浏览量: 18
- PDF下载量: 1
- 被引次数: 0
