



融合学习型特征与几何优化的机器人单目视觉里程计方法
doi: 10.13700/j.bh.1001-5965.2026.0046
Monocular visual odometry method for robots learning-based features and geometric optimization
 下载:
下载:

 点击查看大图
点击查看大图
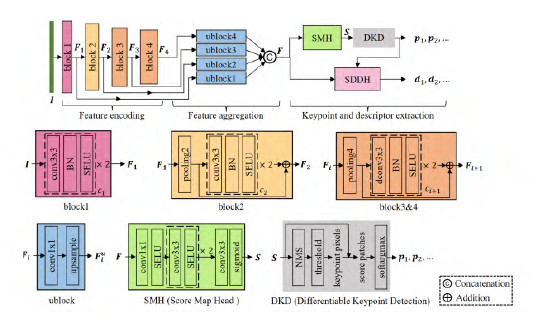
图(1)
计量
- 文章访问数: 47
- HTML全文浏览量: 35
- PDF下载量: 0
- 被引次数: 0
