



Sparse multi-wavelet-based identification of time-varying system with applications to EEG signal time-frequency analysis
-
摘要:
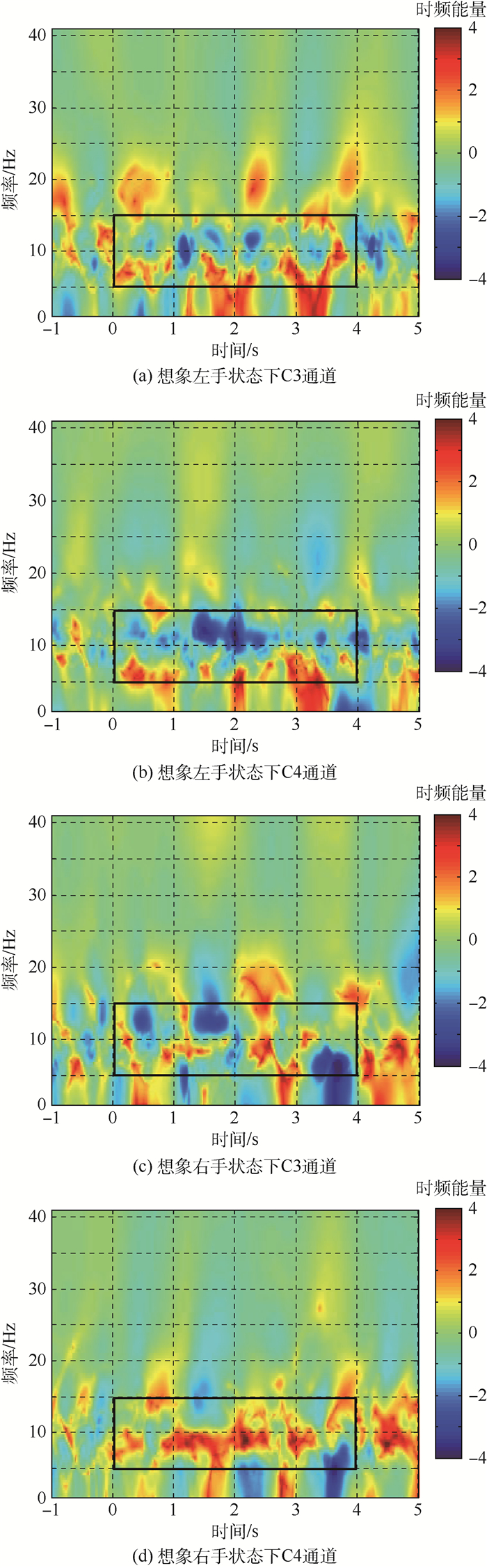
通过时变参数建模算法对非平稳时变系统的辨识问题进行了研究,并将其应用于脑电(EEG)信号时频特征提取分析。首先,将时变系统参数用具有良好局部逼近能力的多小波基函数进行展开,时变系统建模问题简化为时不变回归模型估计。其次,进一步结合正则化正交最小二乘(ROLS)算法,既降低模型复杂度,又避免模型过拟合问题,从而实现了时变参数的快速准确估计。仿真实例结果表明,与传统递归最小二乘(RLS)算法、经典正交最小二乘(OLS)算法结果相比,所提稀疏多小波建模算法能够更加准确跟踪时变参数的变化。最后,该算法用于运动想象任务下采集的真实EEG信号的时频特征分析,能够有效地得到
α 节律下高时频分辨率的事件相关去同步(ERD)及事件相关同步(ERS)分析结果,验证了本文算法的应用性。-
关键词:
- 非平稳时变系统 /
- 多小波基函数 /
- 正则化正交最小二乘(ROLS) /
- 参数估计 /
- 脑电(EEG)信号时频分析
Abstract:The problem of identification in non-stationary time-varying system is investigated based on a time-varying parametric modelling algorithm, and is applied to time-frequency feature extraction analysis of electroencephalography (EEG) signals. The multi-wavelet basis function which has proved efficient for tracking the transient local changes in signals, is employed to approximate the time-varying coefficients, and thus the initial time-varying modelling problem is then simplified into a time-invariant regression model estimation problem. In addition, the regularized orthogonal least squares (ROLS) algorithm is used to construct a parsimonious model structure and estimate the model parameters effectively, which not only reduces the model complexity, but also avoids the overfitting problem. The simulation results show that, compared with traditional recursive least squares (RLS) algorithm and classical orthogonal least squares (OLS) algorithm, the proposed sparse multi-wavelet-based modelling method is capable of estimating time-varying parameters more accurately. Furthermore, the application of the proposed method to the real EEG signals during motor imagery has proven to have powerful tracking capabilities, and a time-frequency analysis is introduced based on the identified time-varying model. The high time-frequency resolution of the proposed method enables the characterizations of event-related desynchronization (ERD) and event-related synchronization (ERS) in alpha band precisely, and validates the applicability of the proposed modelling algorithm.
-

图 1 基于3种算法的参数辨识结果
Figure 1. Parameter identification results based on three algorithms

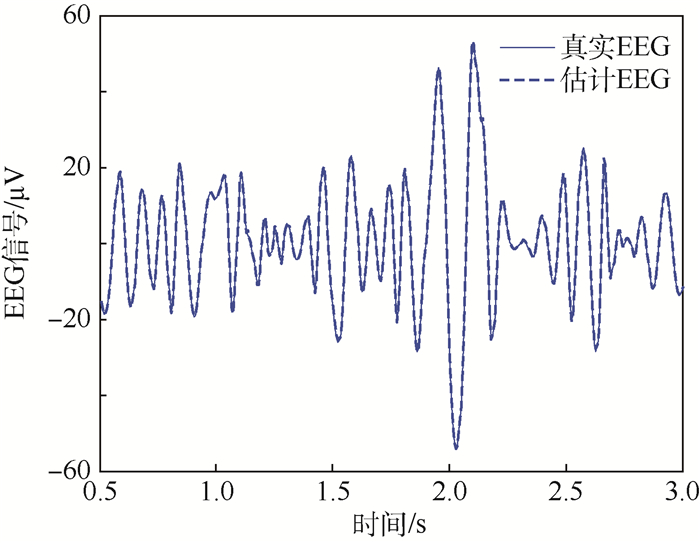
图 3 5阶时变自回归模型估计结果与真实EEG信号对比
Figure 3. Comparison between estimation results from TVAR(5) time-varying autoregressive model and real EEG signal

图 4 不同任务下C3、C4通道相对时频能量变化图
Figure 4. Relative time-frequency power spectrum of channel C3 and C4 during motor imagery

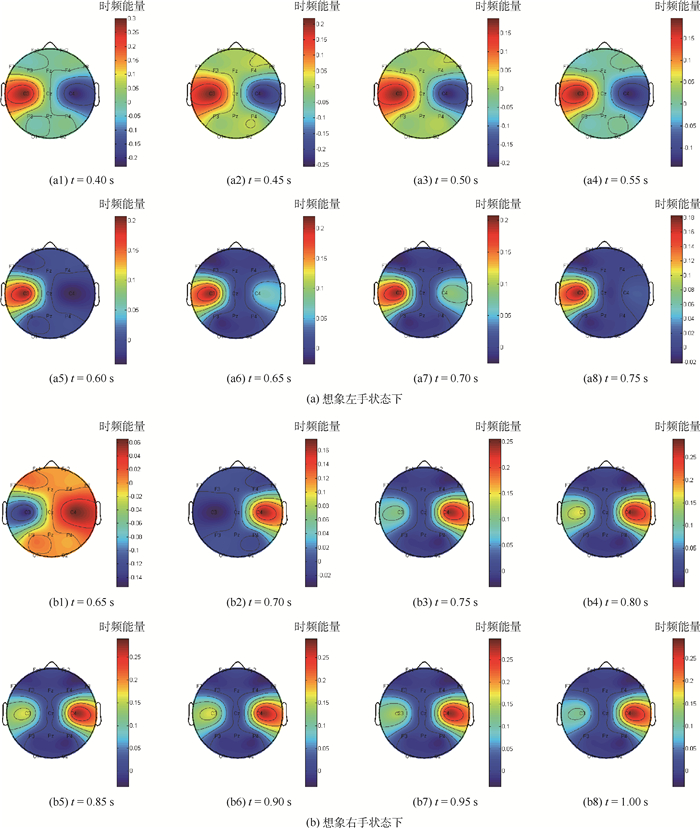
图 5 各类任务下不同时间点相对能量头皮地形图
Figure 5. Topographic maps of time-dependent power during motor imagery tasks
表 1 3种辨识算法估计结果对比
Table 1. Comparison of estimation results among three identification algorithms
辨识算法 估计参数 MAE RMSE RLS算法 a1(t) 0.044 8 0.142 7 a2(t) 0.042 2 0.263 4 b1(t) 0.011 4 0.149 6 b2(t) 0.017 6 0.107 7 B样条-OLS估计法 a1(t) 0.040 6 0.101 0 a2(t) 0.037 7 0.178 9 b1(t) 0.008 9 0.121 7 b2(t) 0.016 8 0.102 4 B样条-ROLS建模算法 a1(t) 0.039 2 0.097 5 a2(t) 0.035 0 0.136 5 b1(t) 0.007 9 0.099 0 b2(t) 0.015 4 0.102 0  下载: 导出CSV
下载: 导出CSV
-
[1] COBURN K L, LAUTERBACH E C, BOUTROS N N, et al.The value of quantitative electroencephalography in clinical psychiatry:A report by the committee on research of the american neuropsychiatric association[J].The Journal of Neuropsychiatry and Clinical Neurosciences, 2006, 18(4):460-500. doi: 10.1176/jnp.2006.18.4.460 [2] SKRETTING K, ENGAN K.Recursive least squares dictionary learning algorithm[J].IEEE Transactions on Signal Processing, 2010, 58(4):2121-2130. doi: 10.1109/TSP.2010.2040671 [3] 于开平, 庞世伟, 赵婕.时变线性/非线性结构参数识别及系统辨识算法研究进展[J].科学通报, 2009, 54(20):3147-3156.YU K P, PANG S W, ZHAO J.Advances in method of time-varying linear/nonlinear structural system identification and parameter estimate[J].Chinese Science Bulletin, 2009, 54(20):3147-3156(in Chinese). [4] LI B, CHEN X.Wavelet-based numerical analysis:A review and classification[J].Finite Elements in Analysis and Design, 2014, 81(4):14-31. [5] LI Y, WEI H L, BILLINGS S A.Identification of time-varying systems using multi-wavelet basis functions[J].IEEE Transactions on Control Systems Technology, 2011, 19(3):656-663. doi: 10.1109/TCST.2010.2052257 [6] LI Y, WEI H L, BILLINGS S A, et al.Time-varying model identification for time-frequency feature extraction from EEG data[J].Journal of Neuroscience Methods, 2011, 196(1):151-158. doi: 10.1016/j.jneumeth.2010.11.027 [7] WEI H L, BILLINGS S A.Model structure selection using an integrated forward orthogonal search algorithm assisted by squared correlation and mutual information[J].International Journal of Modelling, Identification and Control, 2008, 3(4):341-356. doi: 10.1504/IJMIC.2008.020543 [8] WANG N, ER M J, HAN M.Parsimonious extreme learning machine using recursive orthogonal least squares[J].IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(10):1828-1841. doi: 10.1109/TNNLS.2013.2296048 [9] WEI H L, BILLINGS S A, LIU J J.Time-varying parametric modelling and time-dependent spectral characterisation with applications to EEG signals using multiwavelets[J].International Journal of Modelling, Identification and Control, 2010, 9(3):215-224. doi: 10.1504/IJMIC.2010.032802 [10] GUO L, RIVERO D, PAZOS A.Epileptic seizure detection using multiwavelet transform based approximate entropy and artificial neural networks[J].Journal of Neuroscience Methods, 2010, 193(1):156-163. doi: 10.1016/j.jneumeth.2010.08.030 [11] SCHNEIDER K, VASILYEV O V.Wavelet methods in computational fluid dynamics[J].Annual Review of Fluid Mechanics, 2010, 42:473-503. doi: 10.1146/annurev-fluid-121108-145637 [12] CHUI C K.An introduction to wavelets[M].Amsterdam:Elsevier, 2016:49-74. [13] GUO Y, GUO L, BILLINGS S A, et al.An iterative orthogonal forward regression algorithm[J].International Journal of Systems Science, 2015, 46(5):776-789. doi: 10.1080/00207721.2014.981237 [14] GUO Y, GUO L Z, BILLINGS S A, et al.Identification of nonlinear systems with non-persistent excitation using an iterative forward orthogonal least squares regression algorithm[J].International Journal of Modelling, Identification and Control, 2015, 23(1):1-7. doi: 10.1504/IJMIC.2015.067496 [15] CHEN S, CHNG E, ALKADHIMI K.Regularized orthogonal least squares algorithm for constructing radial basis function networks[J].International Journal of Control, 1996, 64(5):829-837. doi: 10.1080/00207179608921659 [16] AKAIKE H.A new look at the statistical model identification[J].IEEE Transactions on Automatic Control, 1974, 19(6):716-723. doi: 10.1109/TAC.1974.1100705 [17] GOLDBERGER A L, AMARAL L A, GLASS L, et al.Physiobank, physiotoolkit, and physionet[J].Circulation, 2000, 101(23):e215-e220. doi: 10.1161/01.CIR.101.23.e215 [18] YUAN H, HE B.Brain-computer interfaces using sensorimotor rhythms:Current state and future perspectives[J].IEEE Transactions on Biomedical Engineering, 2014, 61(5):1425-1435. doi: 10.1109/TBME.2014.2312397 [19] PFURTSCHELLER G, BRUNNER C, SCHLÖGL A, et al.Mu rhythm (de) synchronization and EEG single-trial classification of different motor imagery tasks[J].NeuroImage, 2006, 31(1):153-159. doi: 10.1016/j.neuroimage.2005.12.003 [20] TAKAHASHI M, TAKEDA K, OTAKA Y, et al.Event related desynchronization-modulated functional electrical stimulation system for stroke rehabilitation:A feasibility study[J].Journal of Neuroengineering and Rehabilitation, 2012, 9(1):56-1-56-6. doi: 10.1186/1743-0003-9-56 [21] LONG J, LI Y, WANG H, et al.A hybrid brain computer interface to control the direction and speed of a simulated or real wheelchair[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2012, 20(5):720-729. doi: 10.1109/TNSRE.2012.2197221 [22] ZHANG R, YAO D, VALDÉS-SOSA P A, et al.Efficient resting-state EEG network facilitates motor imagery performance[J].Journal of Neural Engineering, 2015, 12(6):066024. doi: 10.1088/1741-2560/12/6/066024 [23] YANG H, GUAN C, CHUA K S G, et al.Detection of motor imagery of swallow EEG signals based on the dual-tree complex wavelet transform and adaptive model selection[J].Journal of Neural Engineering, 2014, 11(3):035016. doi: 10.1088/1741-2560/11/3/035016 [24] HESSE W, MLLER E, ARNOLD M, et al.The use of time-variant EEG Granger causality for inspecting directed interdependencies of neural assemblies[J].Journal of Neuroscience Methods, 2003, 124(1):27-44. doi: 10.1016/S0165-0270(02)00366-7 [25] CHAOUACHI M, JRAIDI I, FRASSON C.Modeling mental workload using EEG features for intelligent systems[J].User Modeling, Adaption and Personalization, 2011, 6787(1):50-61. doi: 10.1007%2F978-3-319-20267-9_5 [26] TIBERIO L, CESTA A, OLIVETTI BELARDINELLI M.Psychophysiological methods to evaluate user's response in human robot interaction:A review and feasibility study[J].Robotics, 2013, 2(2):92-121. doi: 10.3390/robotics2020092 -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 981
- HTML全文浏览量: 108
- PDF下载量: 415
- 被引次数: 0
