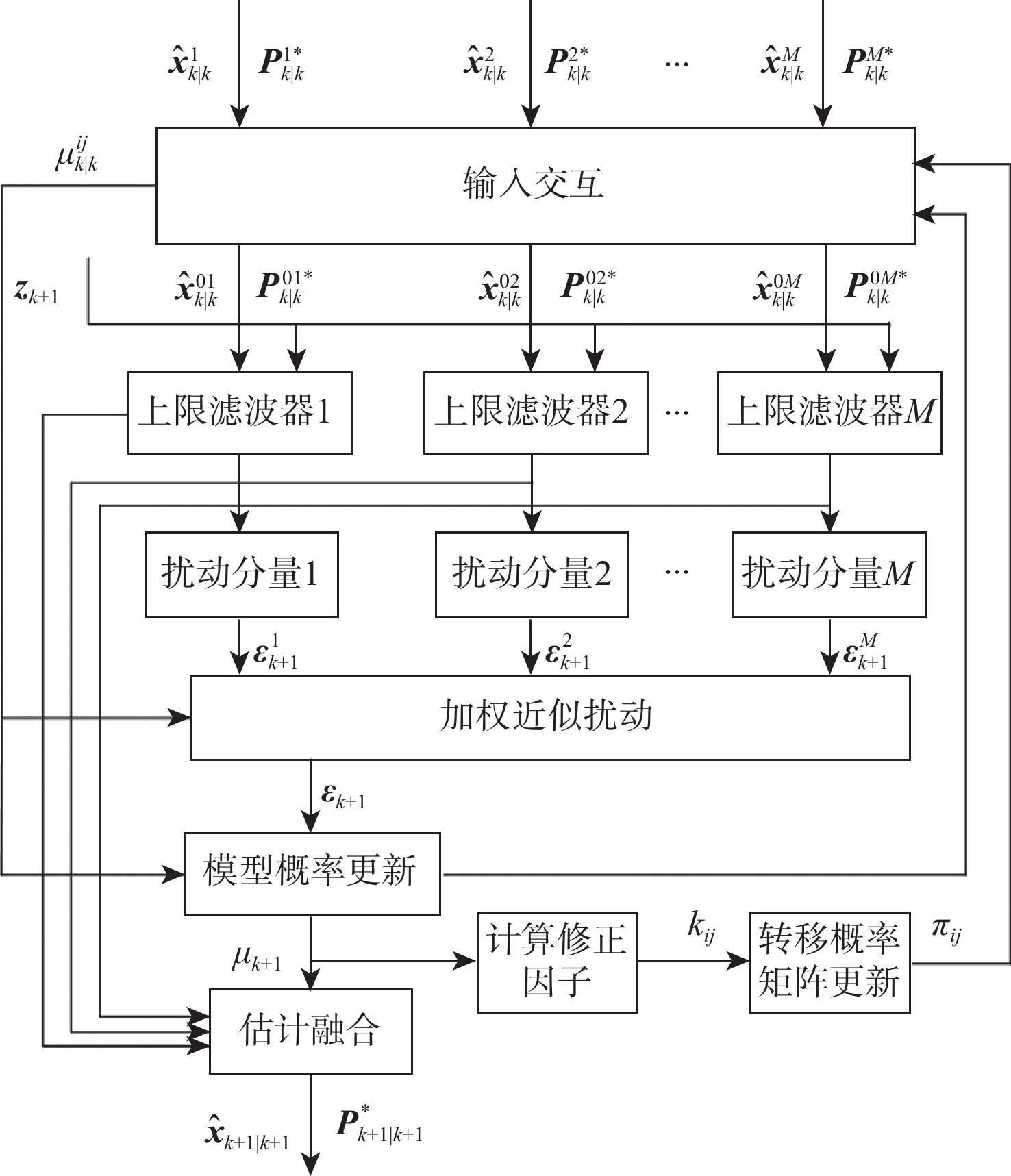
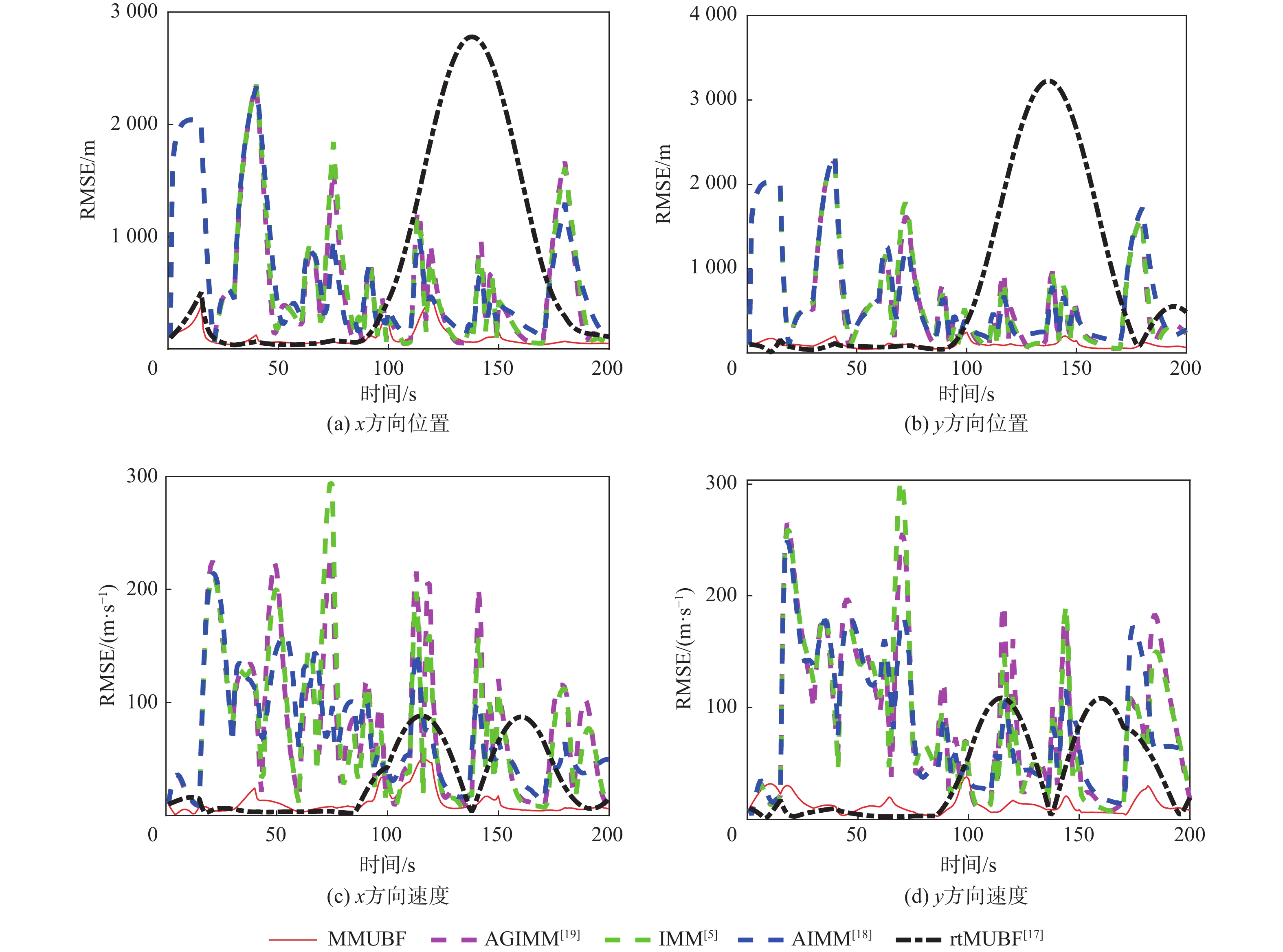
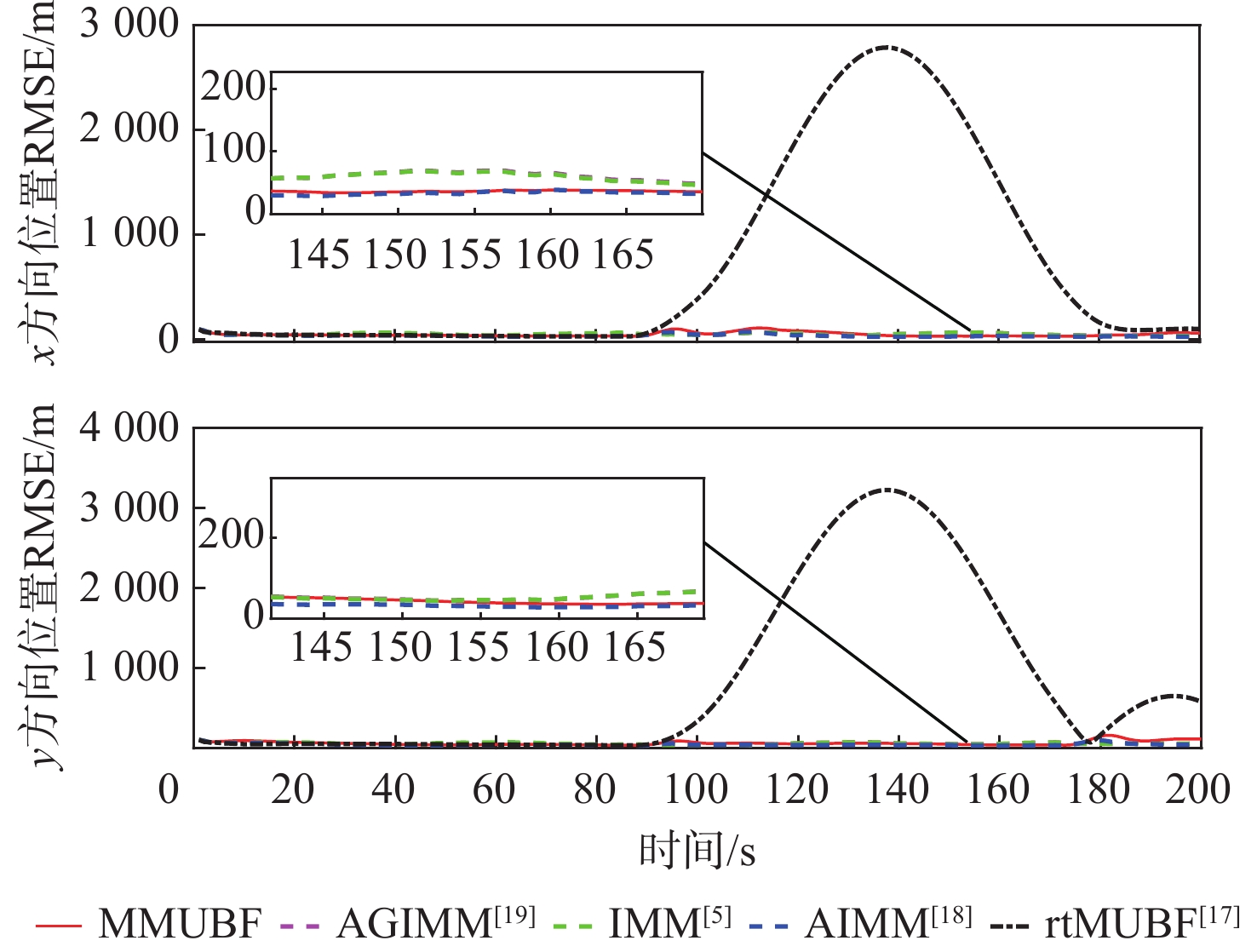
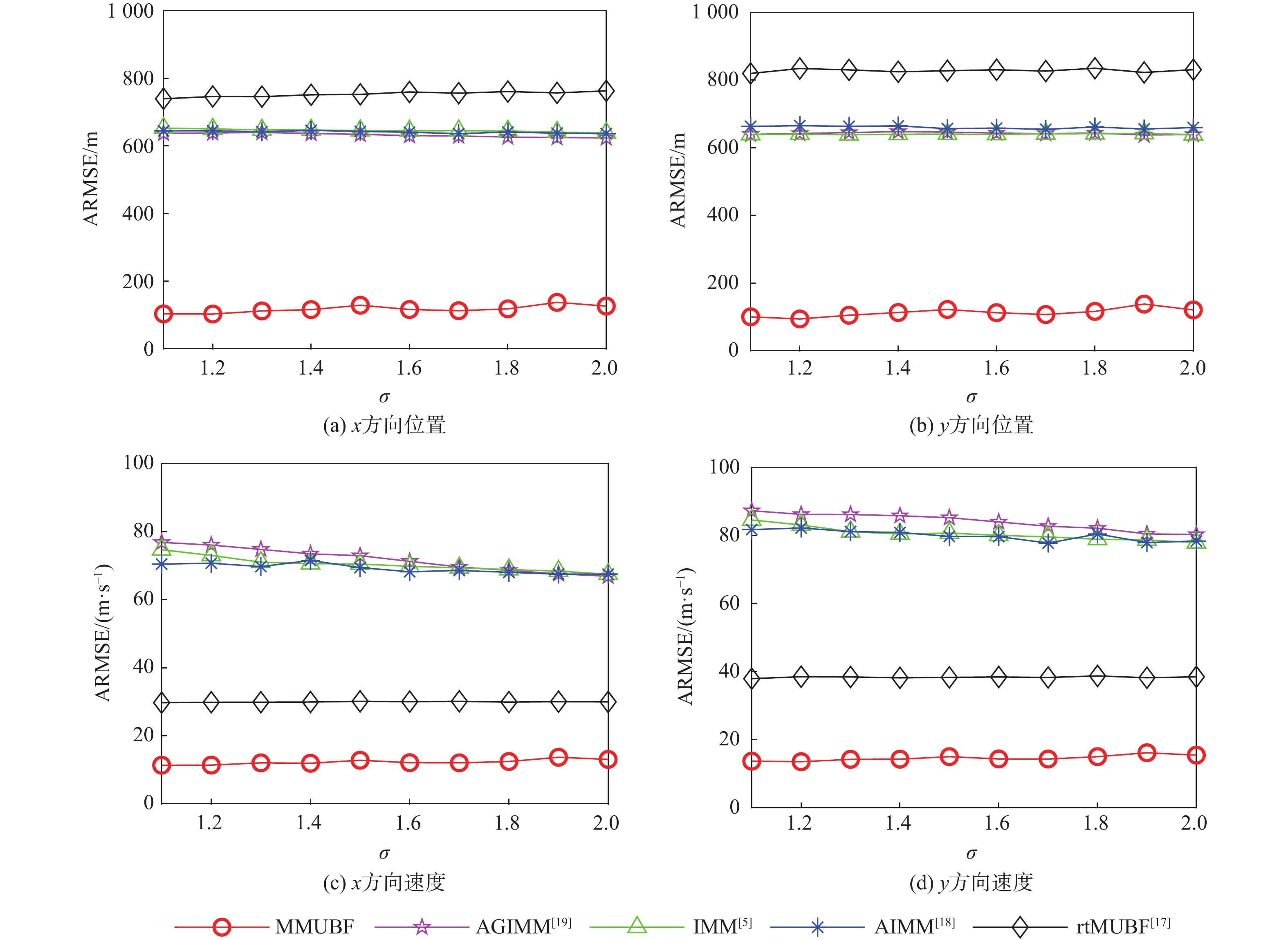
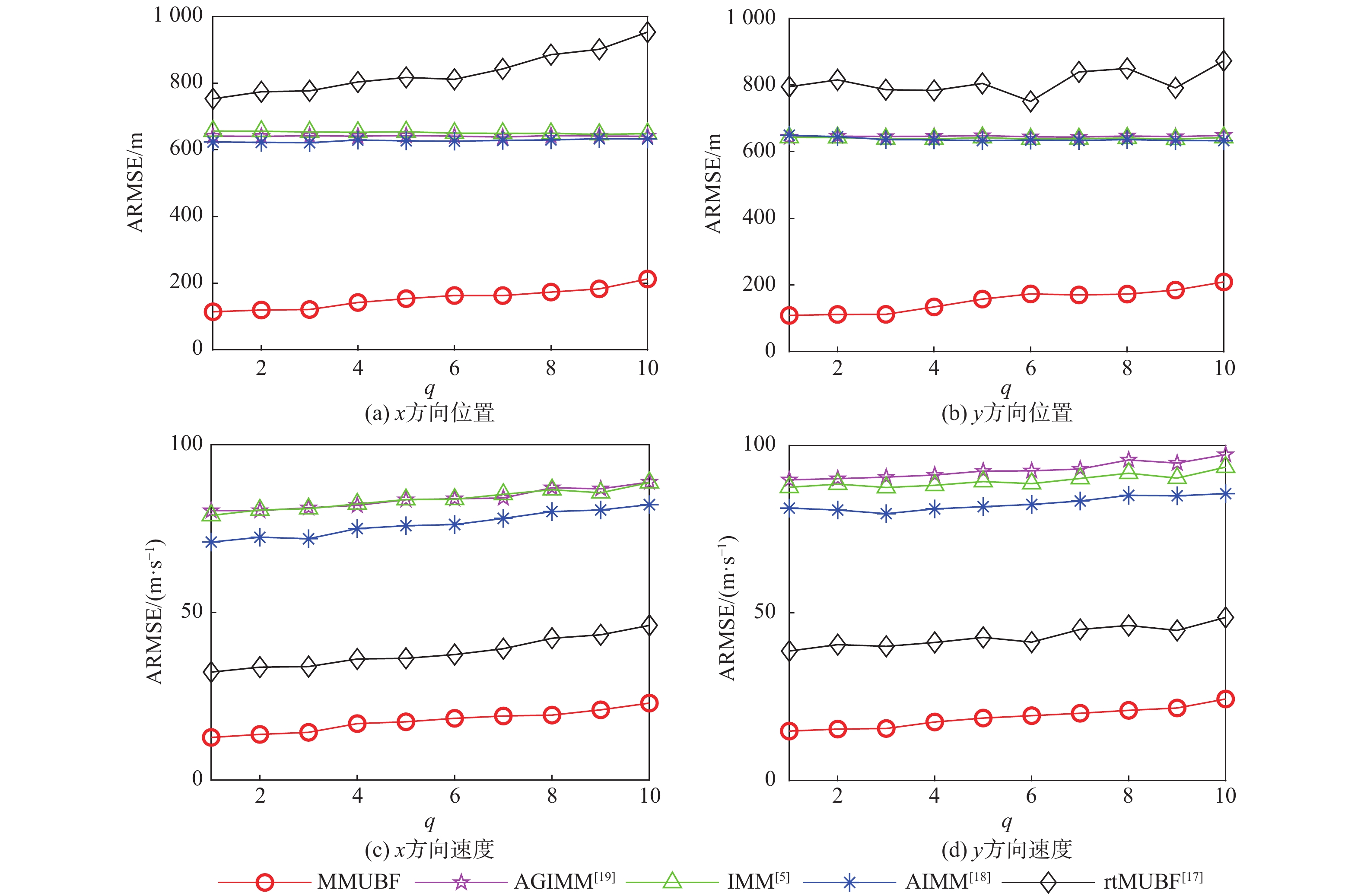
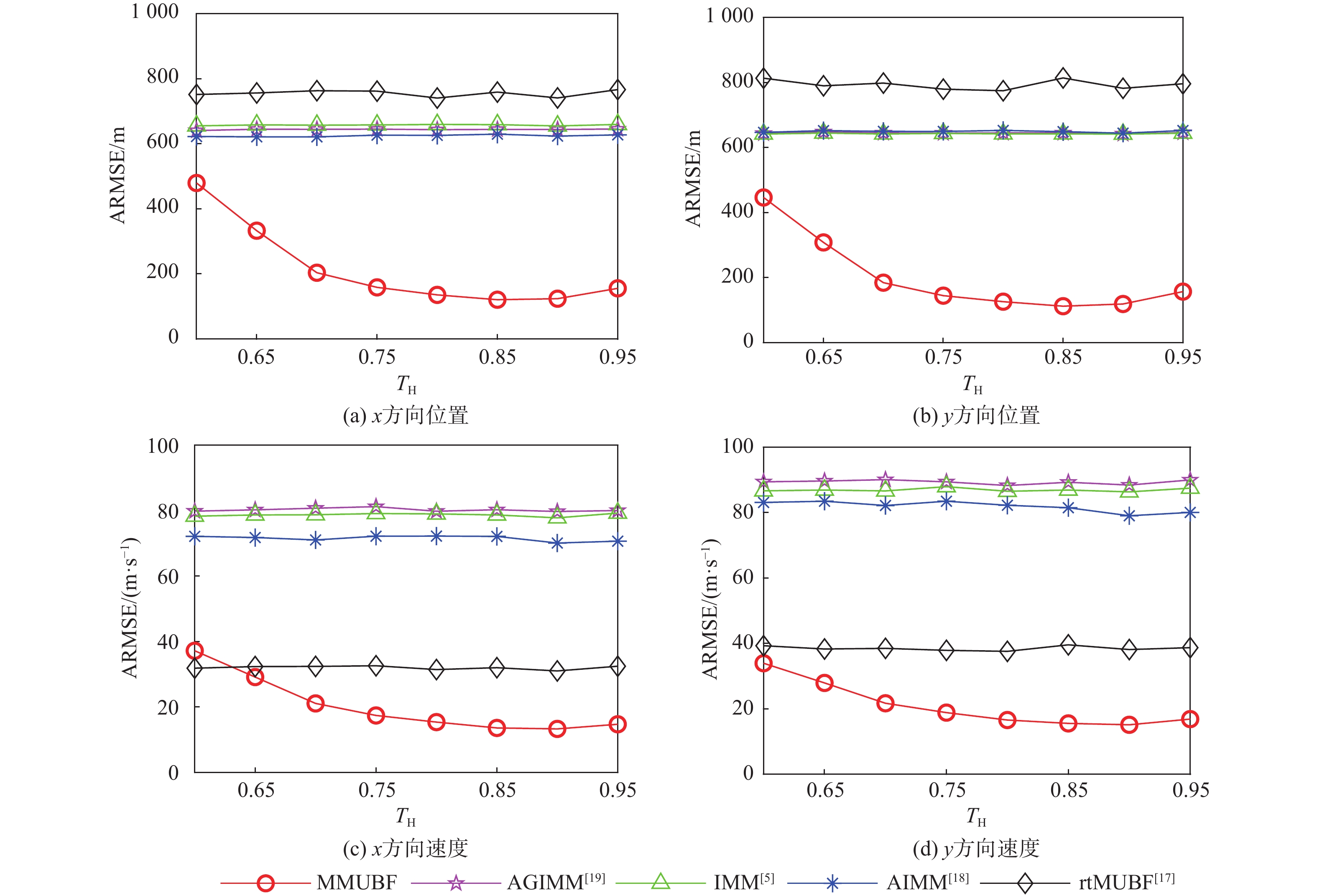
This paper presents the multiple model upper bound filter (MMUBF) for maneuvering target tracking, since the tracking error is too big in existing algorithms when encountering with generalized unknown disturbances. In the multi-model framework, the minimum upper bound filter is implemented as the corresponding sub-filter in every mode to realize state update recursively. Then, the unknown disturbance is identified online according to the filtered result and the posterior mode probability, and the resultant estimate of disturbance is adopted to re-calculate the likelihood in each mode to eliminate the effect of the existence of unknown disturbance on the update of the posterior mode probability. Meanwhile, in order to further improve the model matching accuracy, the Markov transition probability matrix is adaptively adjusted using correction factors. In addition, the computational complexity of the algorithm is analyzed by calculating the number of floating-point operations at each step. In the meantime, the Markov transition probability matrix is adaptively modified using correction factors to further increase the model matching accuracy. Additionally, the number of floating-point operations at each step is calculated in order to examine the algorithm's computational complexity. Regarding various levels of measurement noises, process noises, adjustment coefficients, and probability correction threshold, the simulation results of maneuvering target tracking with time-varying unknown disturbances demonstrate that the suggested algorithm effectively suppresses the tracking error and has higher estimation accuracy than the existing interacting multiple model filter, adaptive interacting multiple model filter, improved adaptive interacting multiple model filter by gray wolf optimization algorithm, and single model-based minimum upper bound filter.




 Download (70503)
Download (70503) 
 Views
Views  Cited by
Cited by 























































 XML Online Production Platform
XML Online Production Platform
