| Citation: | LYU Guizhi, LIU Rong. Violation elimination of nominal models for manipulators constructed with Udwadia-Kalaba equation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11): 2305-2311. doi: 10.13700/j.bh.1001-5965.2018.0076(in Chinese)

|
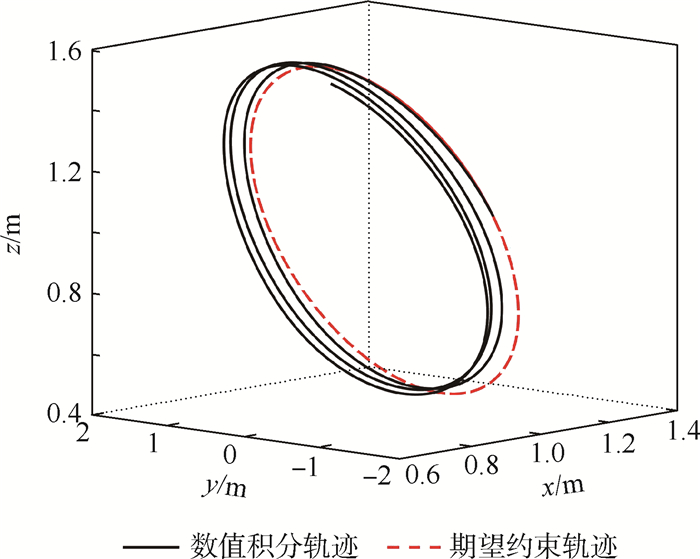
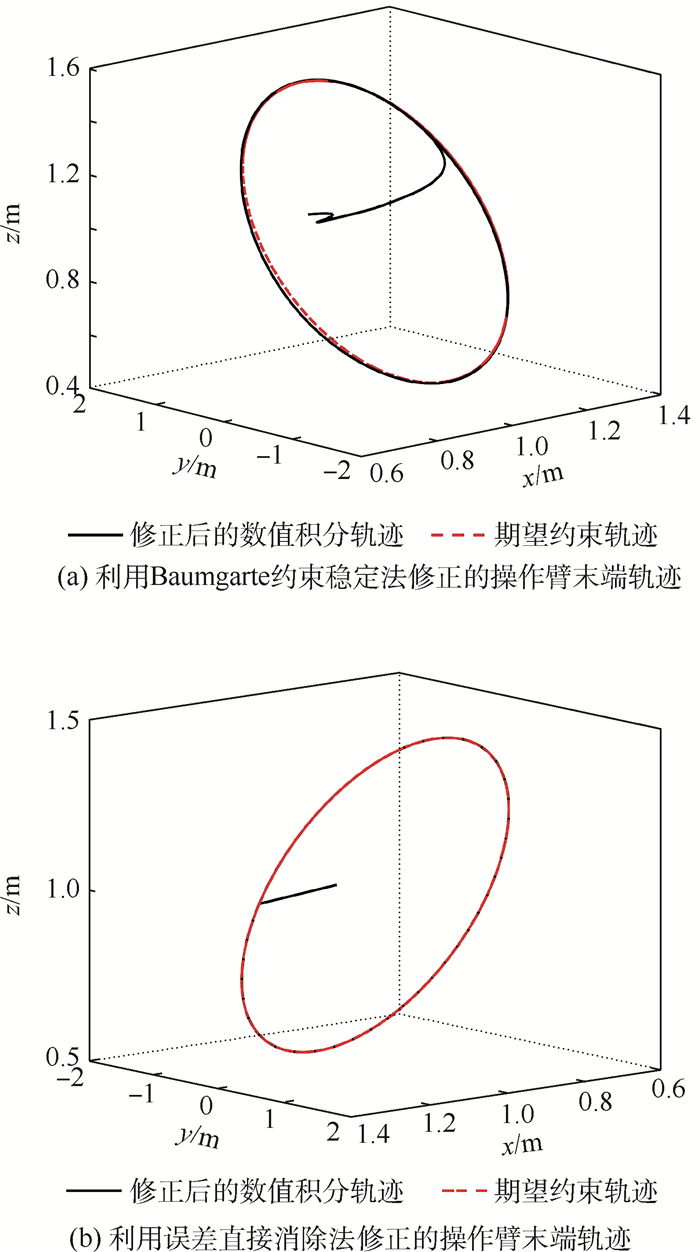
In the nominal model of the manipulator trajectory tracking controller constructed by Udwadia-Kalaba equation, the initial conditions are difficult to satisfy the constraint equations, and the constraint violation is generated by the accumulation of errors in the process of numerical solution, which are all problems to be solved at present. Problems are solved by the method of eliminating violation errors directly. This method adds correction items to position and speed terms which are produced by the numerical solution process. The dynamic nominal model of the three-link manipulator is constructed, and the trajectory tracking simulation is carried out under the desired trajectory based on the Udwadia-Kalaba modeling idea. The simulation numerical results are corrected by using the traditional Baumgarte stability method and the proposed error direct elimination method. The results show that the direct elimination method can control the constraint violation in a smaller range more quickly, and is more suitable for the use of trajectory correction to manipulator dynamic nominal model.

| [1] |
LIANG X, WAN Y, ZHANG C.Task space trajectory tracking control of robot manipulators with uncertain kinematics and dynamics[J].Mathematical Problems in Engineering, 2017(2017):4275201. http://ieeexplore.ieee.org/document/7484342/
|
| [2] |
SAEED K, MEHDI F M.Uncertainty estimation in robust tracking control of robot manipulators using the Fourier series expansion[J].Robotica, 2015, 35(2):310-336. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1348c074ff62b7cd2bd1ceea8dbc5269
|
| [3] |
XIAO B, YIN S, KAYNAK O.Tracking control of robotic manipulators with uncertain kinematics and dynamics[J].IEEE Transactions on Industrial Electronics, 2016, 63(10):6439-6449. doi: 10.1109/TIE.2016.2569068
|
| [4] |
YAO J, DENG W.Active disturbance rejection adaptive control of uncertain nonlinear systems:Theory and application[J].Nonlinear Dynamics, 2017, 89(3):1611-1624. doi: 10.1007/s11071-017-3538-6
|
| [5] |
GALICKI M.Robust task space finite-time chattering-free control of robotic manipulators[J].Journal of Intelligent and Robotic Systems Theory and Applications, 2017, 85(3-4):471-489. doi: 10.1007/s10846-016-0387-3?view=classic
|
| [6] |
UDWADIA F E, KALABA R E.A new perspective on constrained motion[J].Proceedings Mathematical and Physical Sciences, 1992, 439(1906):407-410. doi: 10.1098/rspa.1992.0158
|
| [7] |
UDWADIA F E, KALABA R E.Equations of motion for mechanical systems:A unified approach[J].Journal of Aerospace Engineering, 1996, 9(3):64-69. doi: 10.1061/(ASCE)0893-1321(1996)9:3(64)
|
| [8] |
UDWADIA F E, PHOHOMSIRI P.Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics[J].Proceedings:Mathematical, Physical and Engineering Sciences, 2006, 462(2071):2097-2117. doi: 10.1098/rspa.2006.1662
|
| [9] |
SCHUTTE A, UDWADIA F.New approach to the modeling of complex multibody dynamical systems[J].Journal of Applied Mechanics, 2011, 78(2):856-875. http://adsabs.harvard.edu/abs/2011JAM....78b1018S
|
| [10] |
PETERS J, MISTRY M, UDWADIA F, et al.A unifying framework for robot control with redundant DOFS[J].Autonomous Robots, 2008, 24(1):1-12. doi: 10.1007/s10514-007-9051-x
|
| [11] |
UDWADIA F E, MYLAPILLI H.Constrained motion of mecha-nical systems and tracking control of nonlinear systems:Connections and closed-form results[J].Nonlinear Dynamics and Systems Theory, 2014:15(1):73-89. https://www.researchgate.net/publication/273135173_Constrained_Motion_of_Mechanical_Systems_and_Tracking_Control_of_Nonlinear_Systems_Connections_and_Closed-form_Results
|
| [12] |
UDWADIA F E, KOGANTI P B.Optimal stable control for nonlinear dynamical systems:An analytical dynamics based app-roach[J].Nonlinear Dynamics, 2015, 82(1-2):547-562. doi: 10.1007/s11071-015-2175-1
|
| [13] |
刘佳, 刘荣.双臂协调机械手动力学建模的新方法[J].北京航空航天大学学报, 2016, 42(9):1903-1910. http://bhxb.buaa.edu.cn/CN/abstract/abstract13723.shtml
LIU J, LIU R.New approach for dynamics modeling of dual-arm cooperating manipulators[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(9):1903-1910(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13723.shtml
|
| [14] |
徐亚茹, 刘荣.一种爬壁机器人动力学建模方法[J].北京航空航天大学学报, 2018, 44(2):280-285. http://bhxb.buaa.edu.cn/CN/abstract/abstract14323.shtml
XU Y R, LIU R.An approach for dynamics modeling of climbing robot[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(2):280-285(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14323.shtml
|
| [15] |
UDWADIA F E, WANICHANON T.Control of uncertain nonlinear multibody mechanical systems[J].Journal of Applied Mechanics, 2014, 81(4):041020. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=9452dd09b883548366cb09f49a1da0a1
|
| [16] |
WANICHANON T, CHO H, UDWADIA F E.An approach to the dynamics and control of uncertain multi-body systems[C]//IUTAM Symposium on Dynamical Analysis of Multibody Systems with Design Uncertainties.Amsterdam: Elsevier, 2015: 43-52. https://www.sciencedirect.com/science/article/pii/S2210983815000140
|
| [17] |
KOGANTI P B, UDWADIA F E.Dynamics and precision control of uncertain tumbling multibody systems[J].Journal of Guidance, Control, and Dynamics 2017, 40(5):1176-1190. doi: 10.2514/1.G002212
|
| [18] |
LIU J, LIU R.Simple method to the dynamic modeling of industrial robot subject to constraint[J].Advances in Mechanical Engineering, 2016, 8(4):1687814016646511. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Doaj000004724974
|
| [19] |
UDWADIA F E.A new perspective on the tracking control of nonlinear structural and mechanical systems[J].Proceedings Mathematical Physical and Engineering Sciences, 2003, 459(2035):1783-1800. doi: 10.1098/rspa.2002.1062
|
| [20] |
CHO H, UDWADIA F E.Explicit control force and torque determination for satellite formation-keeping with attitude requirements[J].Journal of Guidance, Control, and Dynamics, 2013, 36(2):589-605. doi: 10.2514/1.55873
|
| [21] |
张新荣, 孟为来.基于虚位移分解与伺服轨迹约束的机械系统跟踪控制[J].机械工程学报, 2015, 51(3):45-50. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201503007
ZHANG X R, MENG W L.Trajectory tracking control of mechanical systems based on virtual displacement decomposition and servo constraint following[J].Journal of Mechanical Engineering, 2015, 51(3):45-50(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201503007
|

Figures(6)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: