| Citation: | QIAN Huaming, WANG Di, WU Yonghui, et al. Filtering algorithm of NFOV star sensor measurement delay[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 234-242. doi: 10.13700/j.bh.1001-5965.2018.0279(in Chinese)

|
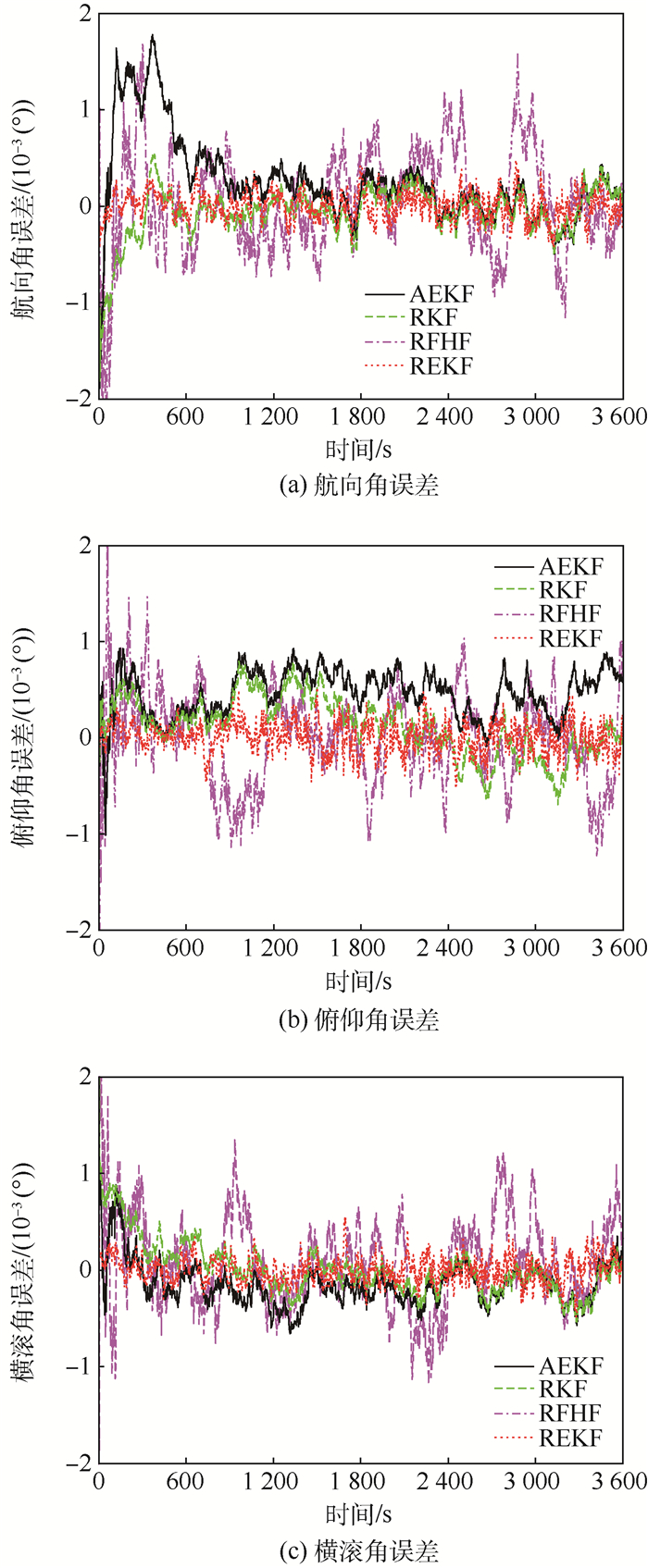
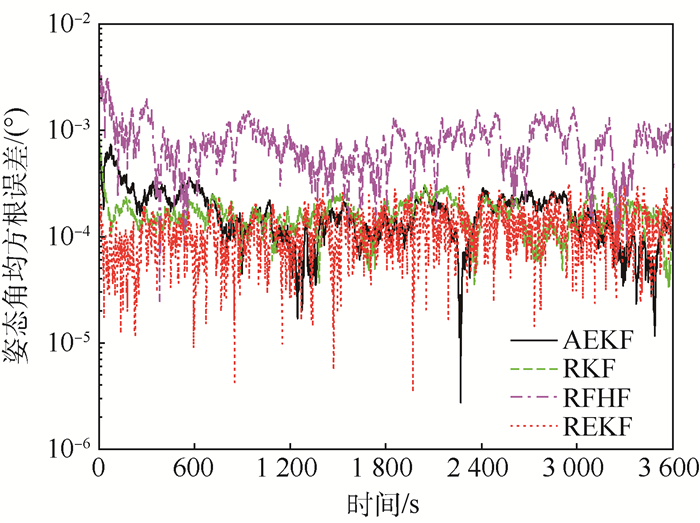
Aimed at measurement delay in the narrow field of view (NFOV) star sensor used for attitude estimation, a robust extended Kalman filter (REKF) algorithm is proposed to solve the measurement delay. According to the minimum mean square error criterion, the minimum upper bound of the variance is solved and the filter gain is determined by the minimum upper bound. The designed REKF algorithm can effectively solve the problem of measurement delay and improve the accuracy of attitude estimation. Finally, the simulation results show that the algorithm is superior to the conventional additive robust extended Kalman filter (AEKF), robust finite-horizon filter (RFHF) and robust Kalman filter (RKF) algorithm, which can better solve the problem of measurement delay in nonlinear systems, and the effectiveness of the algorithm is verified.
| [1] |
XIONG K, WEI C L, LIU L D.Robust extended Kalman filtering for nonlinear systems with stochastic uncertainties[J].IEEE Transactions on Systems, Man, and Cybernetics-Part A:Systems and Humans, 2010, 40(2):399-405. doi: 10.1109/TSMCA.2009.2034836
|
| [2] |
XIONG K, WEI C L, LIU L D.Robust Kalman filtering for discrete-time nonlinear systems with parameter uncertainties[J].Aerospace Science & Technology, 2012, 18(1):15-24.
|
| [3] |
XIONG K, LIU L D, LIU Y.Robust extended Kalman filtering for nonlinear systems with multiplicative noises[J].Optimal Control Applications & Methods, 2011, 32(1):47-63. doi: 10.1002/oca.928/citedby
|
| [4] |
REZAEI H, ESFANJANI R M, FARSI M.Robust filtering for uncertain networked systems with randomly delayed and lost measurements[J].IET Signal Processing, 2015, 9(4):320-327.
|
| [5] |
INOUE R S, TERRA M H, CERRI J P.Extended robust Kalman filter for attitude estimation[J].IET Control Theory & Applications, 2016, 10(2):162-172.
|
| [6] |
DONG Z, YOU Z.Finite-horizon robust Kalman filtering for uncertain discrete time-varying systems with uncertain-covariance white noises[J].IEEE Signal Processing Letters, 2006, 13(8):493-496. doi: 10.1109/LSP.2006.873148
|
| [7] |
ZHENG J H, LIU J F.A robust finite-horizon Kalman filter for uncertain discrete time-varying systems with state-delay and missing measurements[J].International Journal of Grid and Distributed Computing, 2016, 9(3):229-242.
|
| [8] |
WANG F, WANG Z D, LIANG J L, et al.Robust finite-horzion filtering for 2-D systems with randomly varying sensor delays[J].IEEE Transactions on Systems, Man, and Cybernetics:Ssytems, 2018:1-13.
|
| [9] |
QIN W T, WANG X G, BAI Y L, et al.Arbitrary-step randomly delayed robust filter with application to boost phase tracking[J].Acta Astronautica, 2018, 145:304-318. doi: 10.1016/j.actaastro.2018.01.056
|
| [10] |
FAN Z, YANG J.A research of gyro/star-sensor integrated attitude determination based on particle filter[C]//Third International Conference on Instrumentation, Measurement, Computer, Communication and Control.Piscataway, NJ: IEEE Press, 2013: 256-261.
|
| [11] |
REIF K, GVNTHER S, YAZ E, et al.Stochastic stability of the discrete-time extended Kalman filter[J].IEEE Transactions on Automatic Control, 1999, 44(4):714-728.
|
| [12] |
XIONG K, LIU L D, ZHANG H Y.Modified unscented Kalman filtering and its application in autonomous satellite navigation[J].Aerospace Science & Technology, 2009, 13(4):238-246. doi: 10.1016-j.ast.2009.04.001/
|
| [13] |
WANG S, FANG H, TIAN X.Recursive estimation for nonlinear stochastic systems with multi-step transmission delays, multiple packet dropouts and correlated noises[J].Signal Processing, 2015, 115:164-175. doi: 10.1016/j.sigpro.2015.03.022
|
| [14] |
黄蔚.CKF及鲁棒滤波在飞行器姿态估计中的应用研究[D].哈尔滨: 哈尔滨工程大学, 2015.
HUANG W.Application of CKF and robust filter in aircraft attitude estimation[D].Harbin: Harbin Engineering University, 2015(in Chinese).
|
| [15] |
XIE L, SOH Y C, DE SOUZA C E.Robust Kalman filtering for uncertain discrete-time systems[J].IEEE Transactions on Automatic Control, 1994, 39(6):1310-1314. doi: 10.1109/9.293203
|
| [1] | PAN X,SONG T,LI M,et al. Migration control strategy for swarm density based on PDE-constrained heat conduction[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1568-1575 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0635. |
| [2] | WANG J C,LIU Y L,ZHANG P,et al. Short linkable-and-redactable ring signature and its blockchain correcting application[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1911-1920 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0557. |
| [3] | JI Xudong, CHEN Youdong, WEI Hongxing. Robust control of mobile robots based on H∞ under DoS attack[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0267 |
| [4] | PAN C Z,HE G,LI Z J,et al. Adaptive filtered control for uncertain electro-hydraulic servo systems with time-varying output constraints[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1819-1828 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0497. |
| [5] | ZHANG Zhangyong, SUN Yuhua, CHEN Daming, GUO Zhihao. A method for suppressing conducted interference in parallel drive systems based on modulated wave phase shift[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0342 |
| [6] | TIAN Gui-shuang, WANG Shao-ping, SHI Jian. Reliability model and lifetime prediction for train traction system considering multiple dependent components[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0797 |
| [7] | TANG Jingmin, HU Cheng, SONG Yaolian, YU Guicai. NOMA-Based Joint Optimization of Trajectory and Resources for UAV-Enable Integrated Sensing and Communication[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0275 |
| [8] | QU Y,WANG S,ZENG L C,et al. Path planning algorithm for airborne pseudolites installed on stratospheric airships[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1071-1082 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0385. |
| [9] | HAN X L,SHANGGUAN H,ZHANG X,et al. A low-dose CT image denoising method based on artifact estimation[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):491-502 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0263. |
| [10] | CENG Xiang-shu, LIANG Jia-xin, SUN Qiang, HE Yuan-hua. Performance of low-pressure dual-fluid water mist to reduce the thermal runaway risk of NCM Li-battery[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0520 |
| [11] | ZHANG K Q,ZHOU X F,MEN X H,et al. Three-dimensional integrated guidance and control design with fixed-time convergence[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):842-852 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0360. |
| [12] | DENG Chen, CHEN Gong, AO Hou-jun, REN Si-yuan, DU Wen-tao. Design and implementation of a hardware-in-the-loop simulation system for interceptor composite control system[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0703 |
| [13] | LI L,XUE L S,CHEN X H,et al. Improved peak-to-average ratio reduction method in FBMC/OQAM system[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):457-463 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0254. |
| [14] | ZHANG J F,YOU L B,ZHOU M,et al. Multi-objective arrival sequencing and scheduling based on point merge system[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(1):66-73 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0199. |
| [15] | ZHANG Y G,GUO X X,XUE W Y,et al. Research on multi-scale thermal safety of lithium-ion power battery system[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(1):31-44 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0167. |
| [16] | GAO Yang, XU Guo-ning, WANG Sheng, LI Yong-xiang, CAI Rong, YANG Yan-chu. Stability analysis of stratospheric airship energy system[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0020 |
| [17] | ZOU Qi-hong, XU An-yi, LI Peng, SUN Pei-jie, LI Qian, GE Tian-shu. Experimental study on integrated solid desiccant coated heat pump system for manned spaceflight[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2022.0972 |
| [18] | YANG Chao, JIANG Yu, WU Zhigang. Numerical simulation of skipping motion of three-dimensional structure based on boundary element method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(9): 1678-1691. doi: 10.13700/j.bh.1001-5965.2022.0141 |
| [19] | LYU Mengyuan, ZHAI Li, HU Guixing. Conducted electromagnetic interference of wireless charging system with bilateral LCC of electric vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 2079-2086. doi: 10.13700/j.bh.1001-5965.2021.0191 |
| [20] | ZHANG Xuejun, TAN Yuanhao, LI Xueyuan, JIAN Xinhui. A review of development of space-based ADS-B system and its key technologies[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(9): 1589-1604. doi: 10.13700/j.bh.1001-5965.2022.0309 |

Figures(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

He Linshu, Liu Gang. Orthogonal direction algorithm for global function optimization[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(04): 425-429. (in Chinese)





 DownLoad:
DownLoad: