| Citation: | DONG Hu, LIN Miao, GU Sucheng, et al. Motion characteristics of soft bionic tongue based on multi-directional pneumatic actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(9): 1882-1893. doi: 10.13700/j.bh.1001-5965.2018.0788(in Chinese)

|
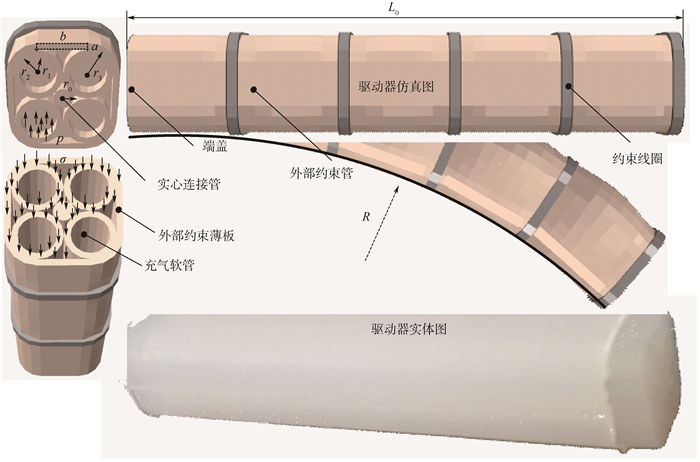
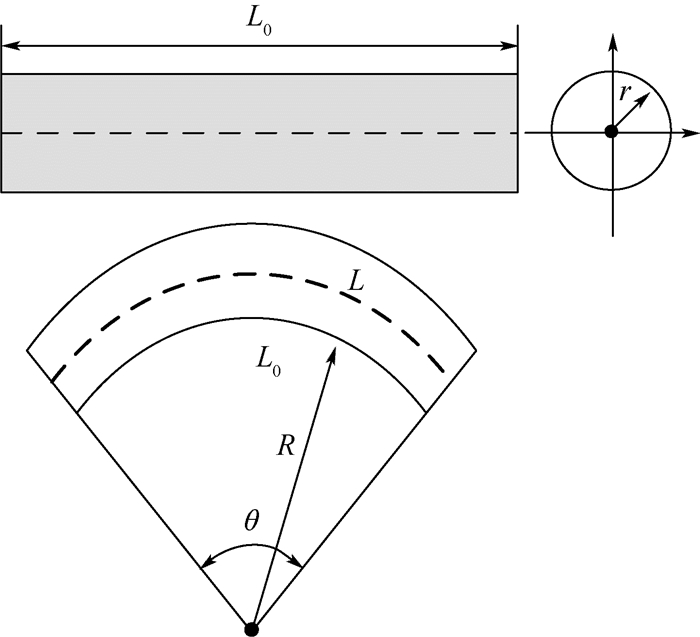
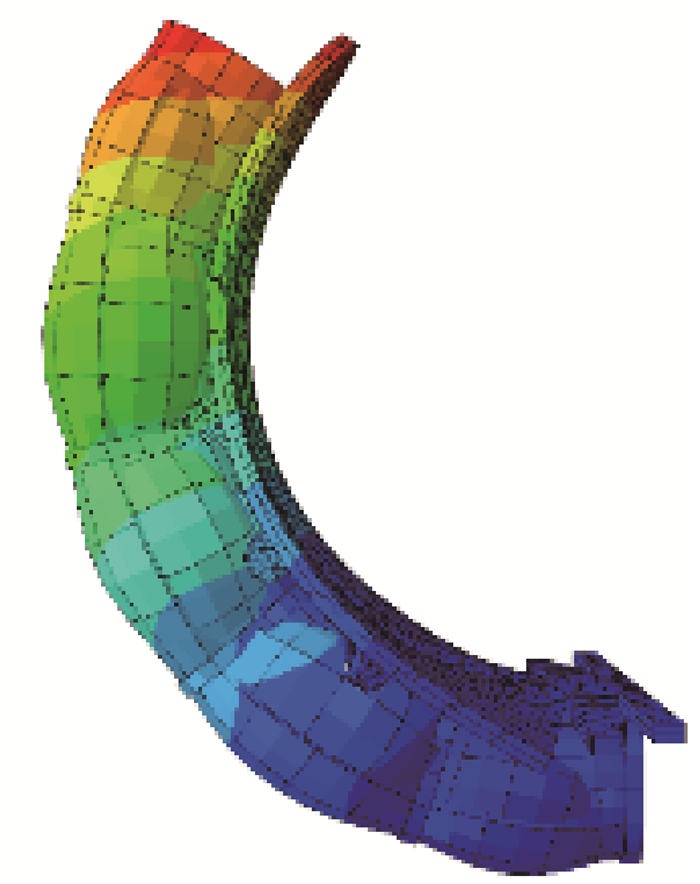
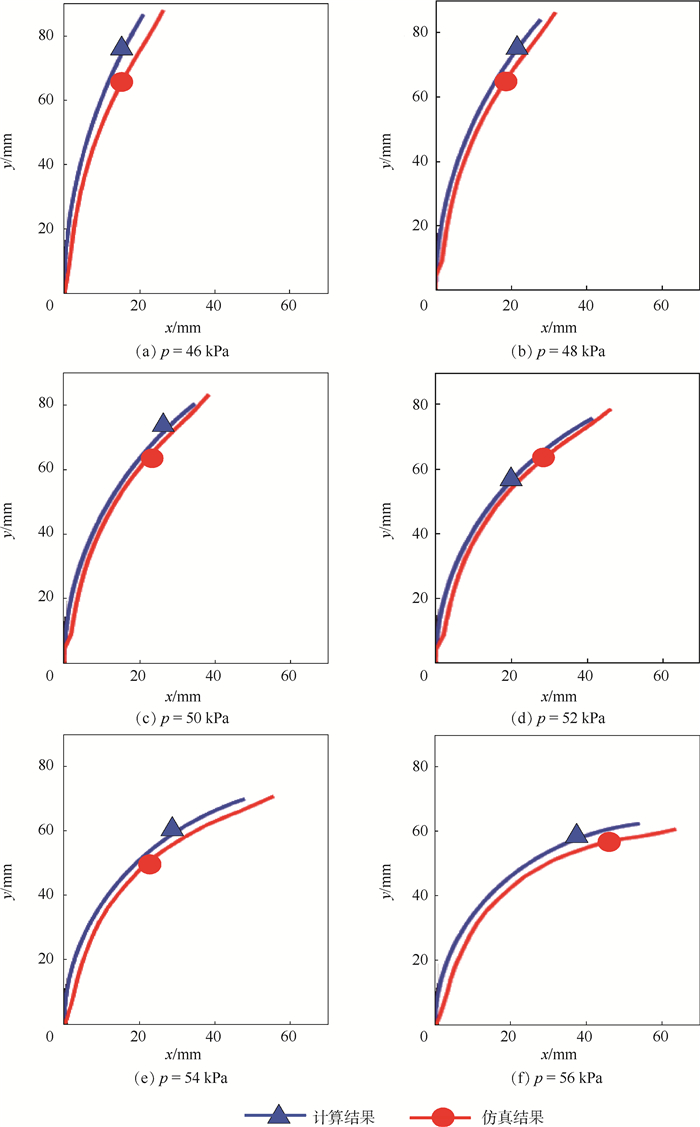
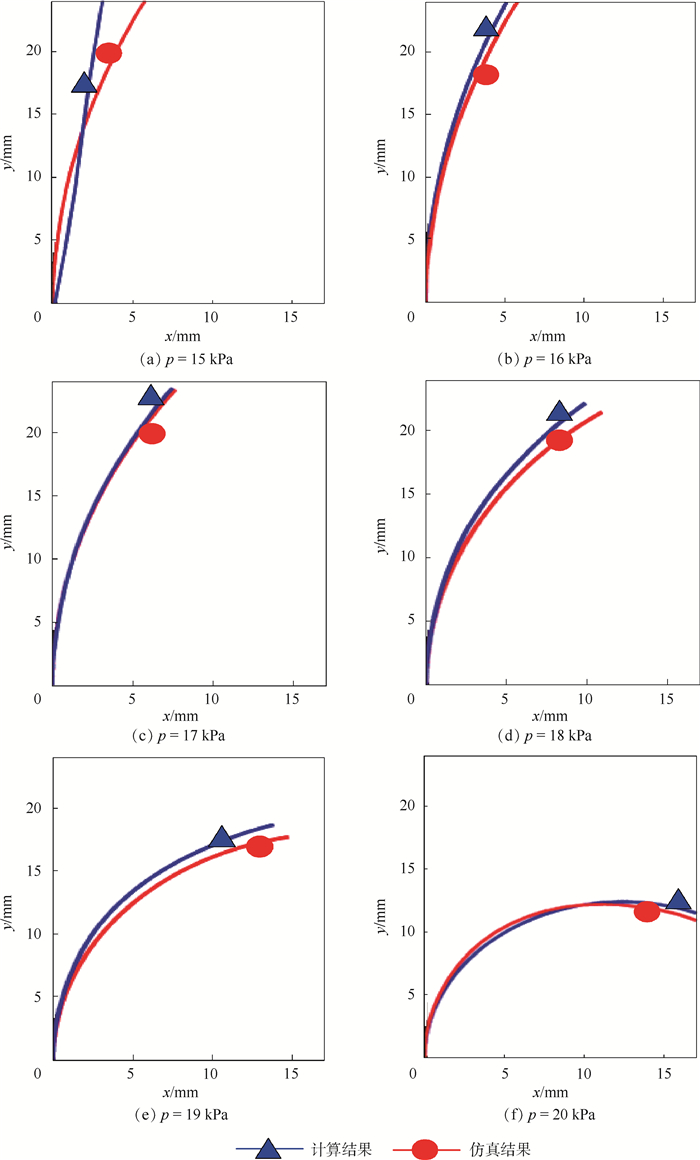
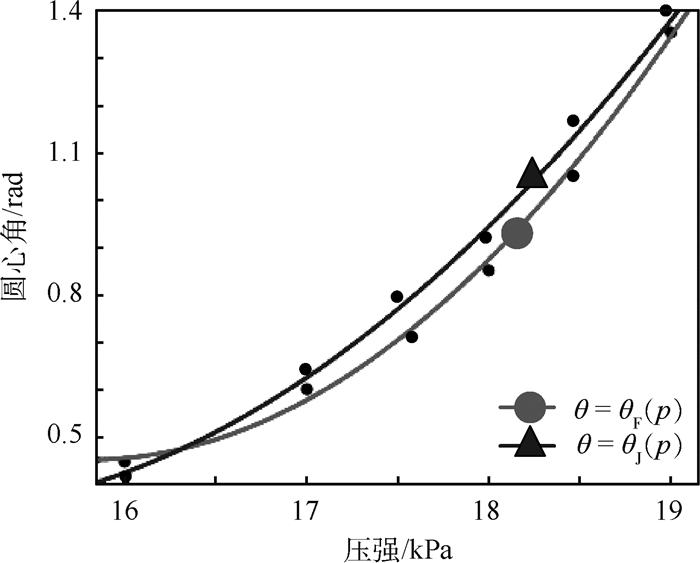
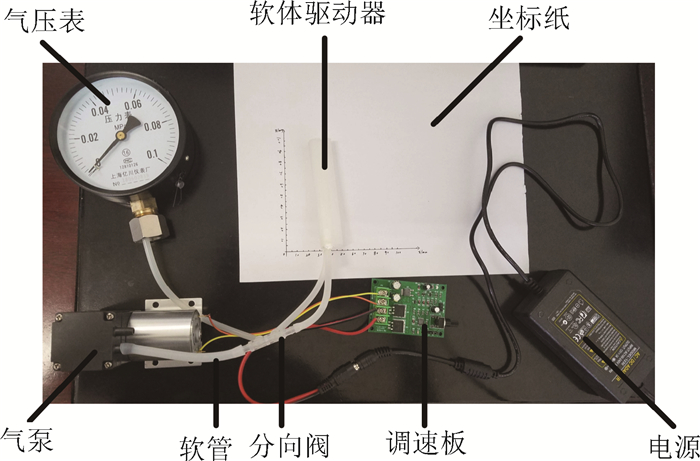
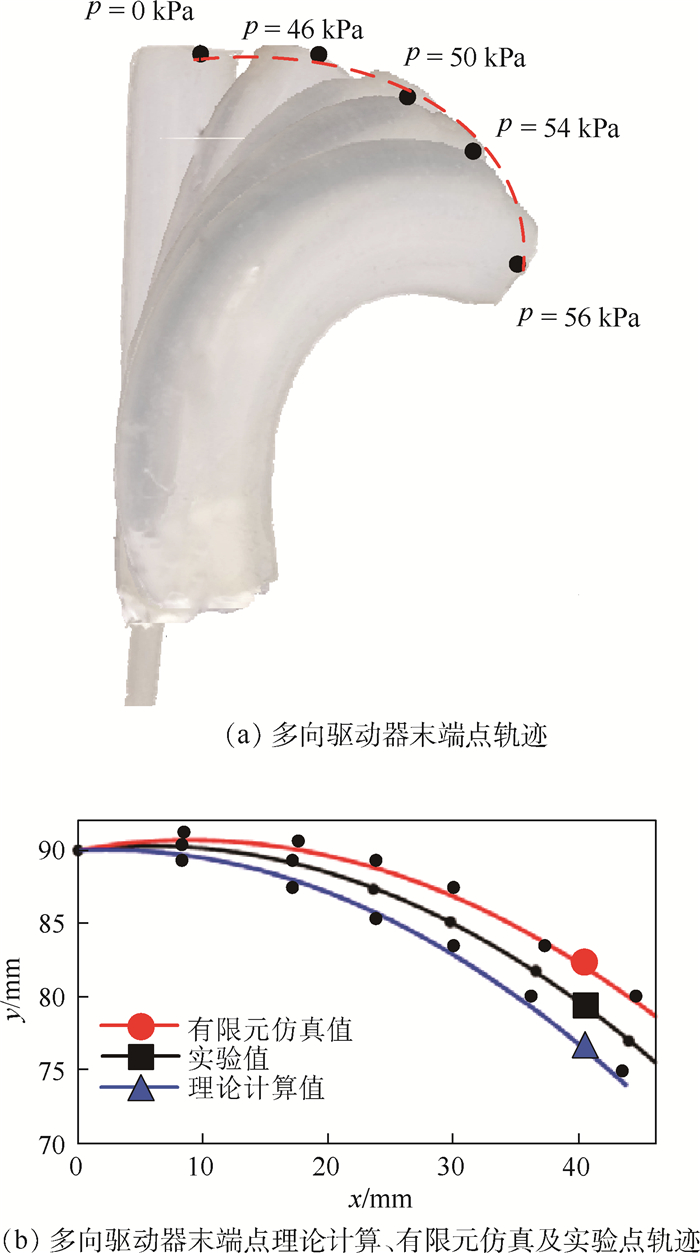
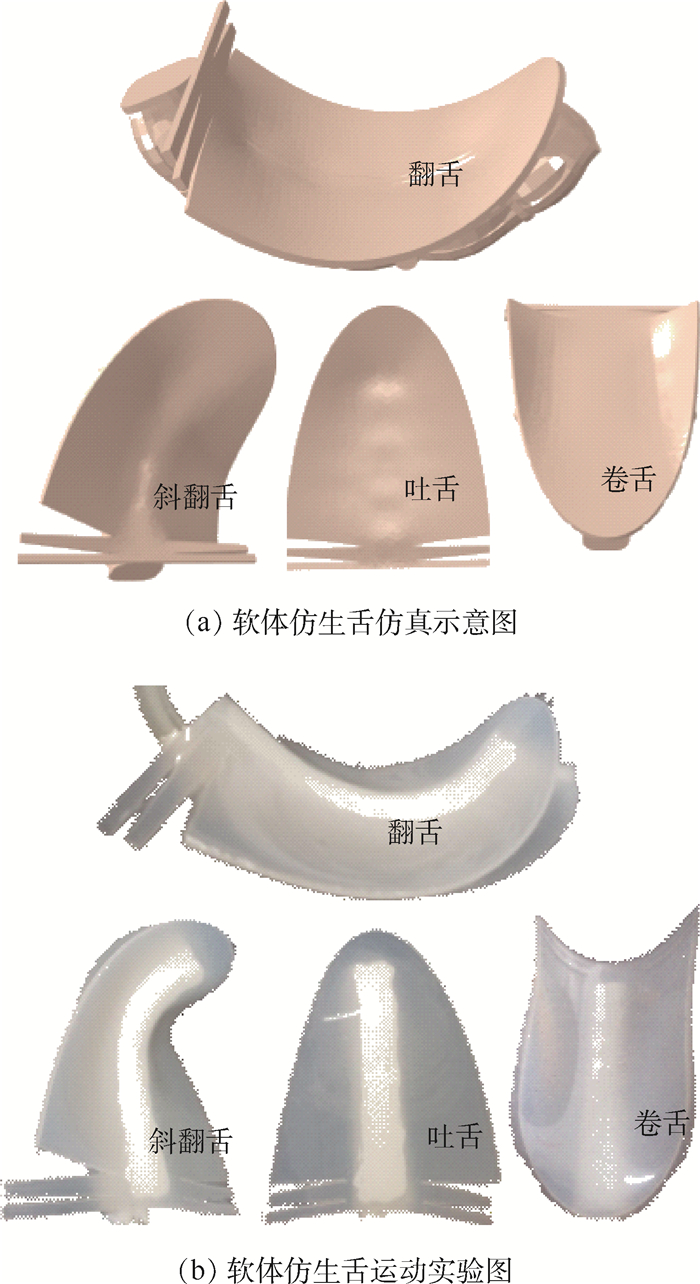
Aimed at multi-directional actuator deformation mechanism, this paper takes the soft bionic tongue as research object and the research on the motion characteristics of one/multi-directional actuator for the soft bionic tongue is carried out. Firstly, a soft bionic tongue driven by pneumatic actuator is designed, which can complete many actions including tongue stretching, twisting, rolling and tilting by the one/multi-directional actuator. Secondly, in order to further study the actuator's deformation mechanism, the research on the structure and deformation operating principle of one/multi-directional actuator is carried out. Then, a nonlinear mathematical model of radius of a soft bionic tongue actuated by specific pressure is established, which is based on the Yeoh model strain energy density function and combined with the force balance equation. Finally, the finite element simulation and experimental validation of the soft bionic tongue are carried out to verify the correctness of the theoretical model. Consequently, the above research provides a theoretical basis for other research on the deformation mechanism of pneumatically actuated soft structures.

| [1] |
曹玉君, 尚建忠, 梁科山, 等.软体机器人研究现状综述[J].机械工程学报, 2012, 48(3):25-33. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201203004
CAO Y J, SHANG J Z, LIANG K S, et al.A review on the softrobotics[J].Journal of Mechanical Engineering, 2012, 48(3):25-33(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201203004
|
| [2] |
张忠强, 邹娇, 丁建宁, 等.软体机器人驱动研究现状[J].机器人, 2018, 40(5):648-659. http://d.old.wanfangdata.com.cn/Periodical/jqr201805010
ZHANG Z Q, ZOU J, DING J N, et al.Research status of the soft robot driving[J].Robot, 2018, 40(5):648-659(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201805010
|
| [3] |
RUS D, TOLLEY M T.Design fabrication and control of soft robots[J].Nature, 2015, 521(7553):467-475. doi: 10.1038/nature14543
|
| [4] |
谢哲新, 龚哲元, 王田苗, 等.可控三维运动的软体驱动器仿真与试验[J].机械工程学报, 2018, 54(21):460-468. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201821002
XIE Z X, GONG Z Y, WANG T M, et al.Simulation and experiment sofa controllable soft spatial fluidic elastomer manipulator[J].Journal of Mechanical Engineering, 2018, 54(21):460-468(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201821002
|
| [5] |
苏满佳, 张逸鸿, 谢荣臻, 等.连续软体机器人的结构范型与形态复现[J].机器人, 2018, 40(5):640-647. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201805009
SU M J, ZHANG Y H, XIE R Z, et al.Structural pattern and shape reproduction for soft continuum robot[J].Robot, 2018, 40(5):640-647(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201805009
|
| [6] |
樊继壮, 于庆国, 袁博文, 等.软体仿蛙游动机器人关节式气动致动器研制[J].机器人, 2018, 40(5):578-586. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201805002
FAN J Z, YU Q G, YUAN B W, et al.Development of a joint-like pneumatic actuator applied to soft frog-inspired swimming robot[J].Robot, 2018, 40(5):578-586(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201805002
|
| [7] |
ILIEVSKI F, MAZZEO A D, SHEPHERD R F, et al.Soft robotics for chemists[J].Angewandte Chemie, 2011, 50(8):1890. doi: 10.1002/anie.201006464
|
| [8] |
胡兵兵, 金国庆.一种仿虎甲幼虫的多驱动器软体机器人的设计与制造[J].机器人, 2018, 40(5):626-633. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201805007
HU B B, JIN G Q.Designand fabrication of a multi-actuator soft robot inspired by young tigerbeetle[J].Robot, 2018, 40(5):626-633(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201805007
|
| [9] |
DEIMEL R, BROCK O.A novel type of compliant and underactuated robotic hand for dexterous grasping[J].International Journal of Robotics Research, 2015, 35(1):161-185. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ec805d5fcd91b7c19b0fc88b82c7b127
|
| [10] |
TOLLEY M T, SHEPHERD R F, MOSADE B, et al.A resilientuntethered soft robot[J].Soft Robotics, 2014, 1(3):213-223.
|
| [11] |
WEHN M, TRUBY R L, FITZGERALD D J, et al.An integrated design and fabrication strategy for entirely soft autonomous robots[J].Nature, 2016, 536(7617):451-455. doi: 10.1038/nature19100
|
| [12] |
BARTLETT N W, TOLLEY M T, OVERVELDE J T, et al.A 3D-printed functionally graded soft robot powered by combustion[J].Science, 2015, 349(6244):161-165. doi: 10.1126/science.aab0129
|
| [13] |
LASCHI C, CIANCHETTI M, MAZZOLAI B, et al.Soft robot arm inspired by the octopus[J].Advanced Robotics, 2012, 26(7):709-727. doi: 10.1163/156855312X626343
|
| [14] |
SHINTAKE J, ROSSET S, SCHUBERT B, et al.Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators[J].Advanced Materials, 2016, 28(2):231-238. doi: 10.1002/adma.201504264
|
| [15] |
SHEN Q, TRABIA S, STALBAUM T, et al.A multiple-shape memory polymer-metal composite actuator capable of programmable control, creating complex 3D motion of bending twisting and oscillation[J].Scientific Reports, 2016, 6(2):24462.
|
| [16] |
郭闯强, 吴春亚, 刘宏.离子聚合物金属复合材料驱动器在机器人中的应用进展[J].机械工程学报, 2017, 53(9):1-13. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201709001
GUO C Q, WU C Y, LIU H.The application progress of ionicpolymer-metal composite materials in robotics[J].Journal of Mechanical Engineering, 2017, 53(9):1-13(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201709001
|
| [17] |
CONNOLL Y, FIONNUALA W, CONOR J B.Automatic design of fiber-reinforced soft actuators for trajectory matching[J].Proceedings of the National Academy of Sciences of the United States of America, 2017, 114(1):51-56. doi: 10.1073/pnas.1615140114
|
| [18] |
KEVIN C G, KAITLYN P B, BRENNAN P.Soft robotic grippers for biological sampling on deep reefs[J].Soft Robotics, 2016, 3(1):2169-5172.
|
| [19] |
KRISTIN M, OLIVER M, REILLY O.On constitutive relations for a rod-based model of a pneu-net bending actuator[J].Extreme Mechanics Letters, 2016, 8(2):38-46.
|
| [20] |
王宁扬, 孙昊, 姜皓, 等.一种基于蜂巢气动网络的软体夹持器抓取策略研究[J].机器人, 2016, 38(3):371-384. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201603014
WANG N Y, SUN H, JIANG H, et al.Study on grabbing algorithm of soft gripper based on honeycomb pneumatic network[J].Robot, 2016, 38(3):371-384(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201603014
|
| [21] |
魏树军, 王天宇, 谷国迎.基于纤维增强型驱动器的气动软体抓手设计[J].机械工程学报, 2017, 53(13):29-38. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201713004
WEI S J, WANG T Y, GU G Y.Design of pneumatic soft grips based on fiber reinforced drivers[J].Chinese Journal of Mechanical Engineering, 2017, 53(13):29-38(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201713004
|
| [22] |
郑俊君, 宋小波, 姜祖辉.一种气动静压软体机器人的驱动力产生机理及控制策略[J].机器人, 2014, 36(5):513-518. http://d.old.wanfangdata.com.cn/Periodical/jqr201405001
ZHENG J J, SONG X B, JIANG Z H.The mechanism and control strategy of driving force of a pneumatic hydrostatic soft robot[J].Robot, 2014, 36(5):513-518(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201405001
|
| [23] |
王华, 康荣杰, 王兴坚.软体弯曲驱动器设计与建模[J].北京航空航天大学学报, 2017, 43(5):1053-1060. https://bhxb.buaa.edu.cn/CN/abstract/abstract14312.shtml
WANG H, KANG R J, WANG X J.Design and modeling of soft bending driver[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(5):1053-1060(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract14312.shtml
|
| [24] |
费燕琼, 庞武, 于文博.气压驱动软体机器人运动研究[J].机械工程学报, 2017, 53(13):14-18. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201713002
FEI Y Q, PANG W, YU W B.Study on motion of air-driven soft robot[J].Journal of Mechanical Engineering, 2017, 53(13):14-18(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201713002
|
| [25] |
KIM H, HAN M W, SONG S H, et al.Soft morphing hand driven by SMA tendon wire[J].Composites Part B:Engineering, 2016, 105(16):138-148. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=8f20d0cbe31c41ae31adc45820bc5376
|
| [26] |
MATHIJSSEN G, SCHULTZ J, VANDER B, et al.A muscle-like recruitment actuator with modular redundant actuation units for soft robotics[J].Robotics and Autonomous Systems, 2015, 74(15):40-50. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=219c910f0ff51d9d4300921d5a238866
|
| [27] |
史震云, 朱前成.基于智能驱动器的软体机器人系统[J].北京航空航天大学学报, 2016, 42(12):2596-2602. https://bhxb.buaa.edu.cn/CN/abstract/abstract13846.shtml
SHI Z Y, ZHU Q C.Based on the intelligent driver of the softrobotsystem[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(12):2596-2602(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract13846.shtml
|
| [28] |
王扬威, 兰博文, 刘凯.形状记忆合金丝驱动的柔性机械臂建模与实验[J].浙江大学学报, 2018, 52(4):628-634. http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-gx201804003
WANG Y W, LAN B W, LIU K.Modeling and experiment of flexible manipulator actuated by shape memory alloy wire[J].Journal of Zhejiang University, 2018, 52(4):628-634(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-gx201804003
|
| [29] |
FEI Y Q, XU H W.Modeling and motion control of a soft robot[J].IEEE Transactions on Industrial Electronics, 2017, 64(2):1737-1742. doi: 10.1109/TIE.2016.2572670
|
| [30] |
MUTLU R, ALICI G, LI W H.A soft mechatronic microstage mechanism based on electroactive polymer actuators[J].IEEE/ASME Transactions on Mechatronics, 2016, 21(3):1467-1477. doi: 10.1109/TMECH.2015.2502597
|
| [31] |
谢高鹏.食品咀嚼模拟机系统的开发与研究[D].长春: 吉林大学, 2014: 10-15. http://cdmd.cnki.com.cn/Article/CDMD-10183-1014295857.htm
XIE G P.The research and development of food chewing simulator system[D].Changchun: Jilin University, 2014: 10-15(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10183-1014295857.htm
|
| [32] |
韩敬虎.咀嚼吞咽一体化仿生机器人研究[D].无锡: 江南大学, 2016: 13-19. http://cdmd.cnki.com.cn/Article/CDMD-10295-1016273785.htm
HAN J H.Research on integrated bionic robot for chewing and swallowing[D].Wuxi: Jiangnan University, 2016: 13-19(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10295-1016273785.htm
|
| [33] |
黄建龙, 解广娟, 刘正伟.基于Mooney-Rivlin模型和Yeoh模型的超弹性橡胶材料有限元分析[J].橡胶工业, 2008, 55(8):467-471. doi: 10.3969/j.issn.1000-890X.2008.08.004
HUANG J L, XIE G J, LIU Z W.The finite element analysis of super-elastic rubber material based on Mooney-Rivlin model and Yeoh model[J].China Rubber Industry, 2008, 55(8):467-471(in Chinese). doi: 10.3969/j.issn.1000-890X.2008.08.004
|
| [34] |
KOTHERA C S, JANAID M, SIROHI J, et al.Experimental characterization and static modeling of mckibben actuators[J].Journal of Mechanical Design, 2009, 131(9):1010-1050.
|

Figures(15) / Tables(6)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: